
A High-Order Approximate Solution for the Nonlinear 3D Volterra Integral Equations with Uniform Accuracy

Abstract
:1. Introduction
2. Existence and Uniqueness of Solution
3. Construction of the High-Order Approximate Solution
4. Estimation of the Truncation Error
5. Convergence Analysis
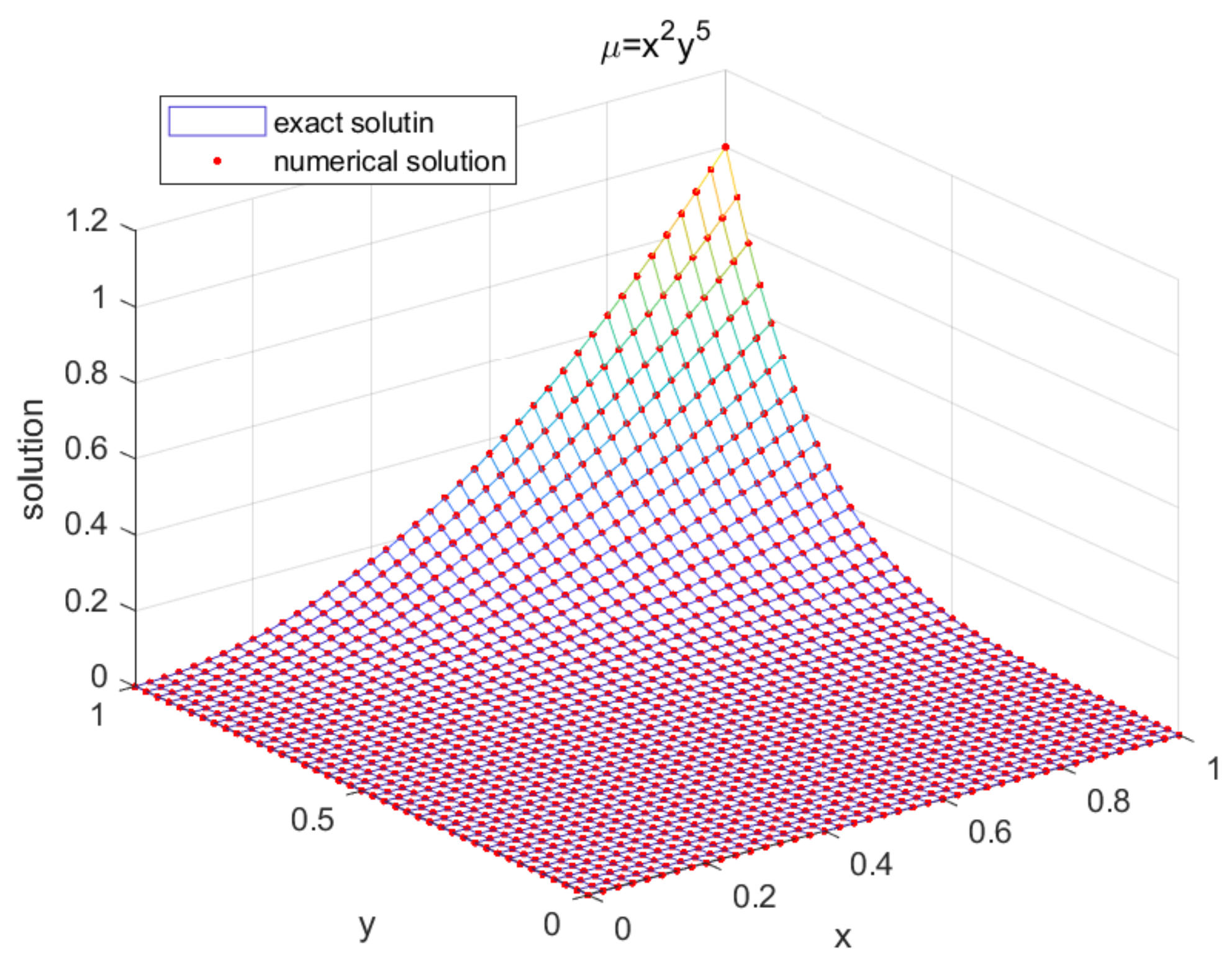
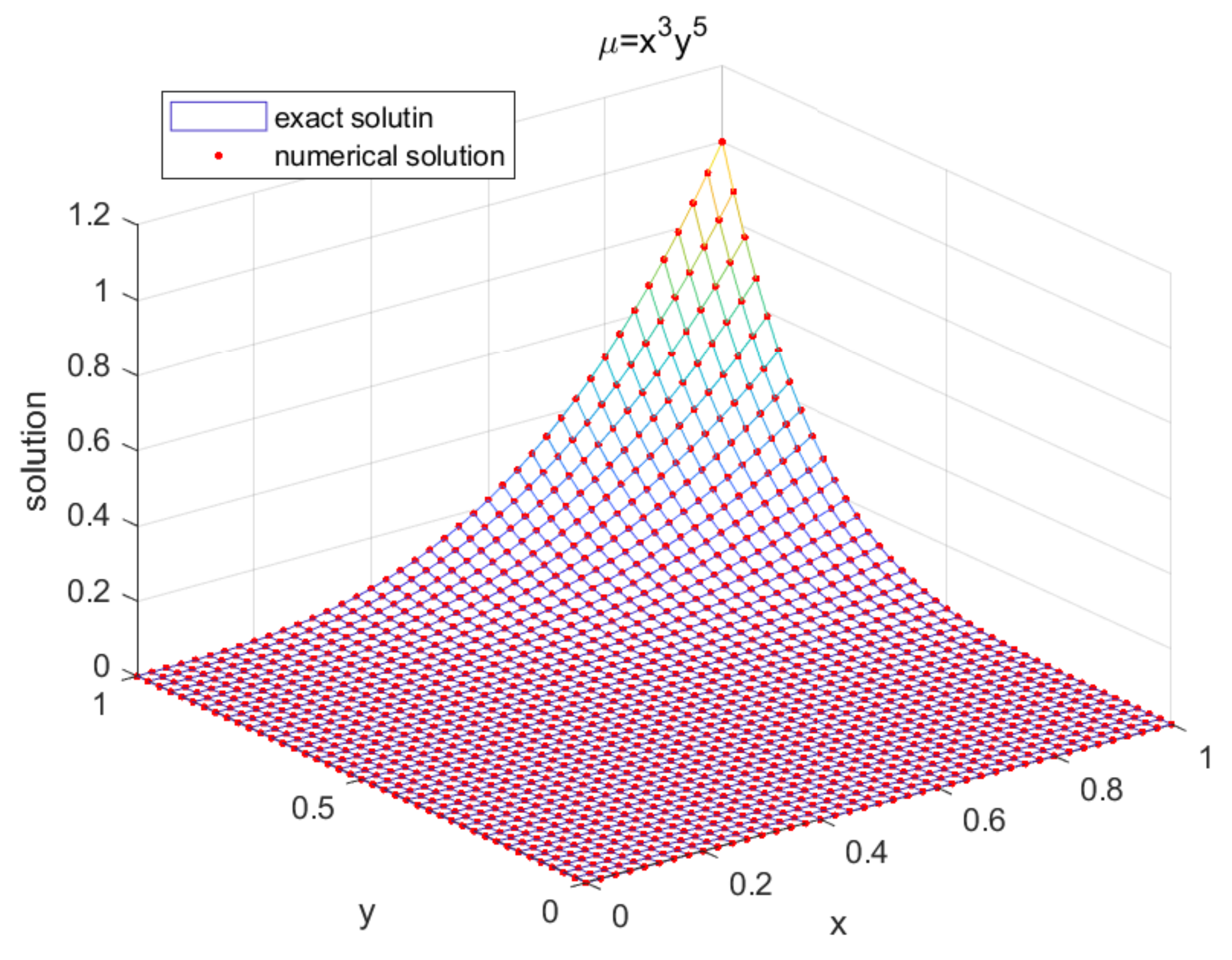
6. Numerical Examples
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- El-Borai, M.; Abdou, M.; Badr, A.; Basseem, M. Singular nonlinear integral equation and its application in viscoelastic nonlinear material. Int. J. Appl. Math. Mech. 2008, 4, 56–77. [Google Scholar]
- Brunner, H. Volterra Integral Equations: An Introduction to Theory and Applications; Cambridge University Press: New York, NY, USA, 2017. [Google Scholar]
- Souchet, R. An analysis of three-dimensional rigid body collisions with friction by means of a linear integral equation of Volterra. Internat. J. Engrg. Sci. 1999, 37, 365–378. [Google Scholar] [CrossRef]
- Katani, R.; Shahmorad, S. Block by block method for the systems of nonlinear Volterra integral equations. Appl. Math. Model. 2009, 34, 400–406. [Google Scholar] [CrossRef]
- Tao, T.; Xu, X.; Cheng, J. On spectral methods for Volterra integral equations and the convergence analysis. J. Comput. Math. 2008, 26, 825–837. [Google Scholar]
- Maleknejad, K.; Aghazadeh, N. Numerical solution of Volterra integral equations of the second kind with convolution kernel by using Taylor-series expansion method. Appl. Math. Comput. 2003, 161, 915–922. [Google Scholar] [CrossRef]
- Jaabar, S.; Hussain, A. Solving Volterra integral equation by using a new transformation. J. Interdiscip. Math. 2021, 24, 735–741. [Google Scholar] [CrossRef]
- Bazm, S.; Lima, P.; Nemati, S. Analysis of the Euler and trapezoidal discretization methods for the numerical solution of nonlinear functional Volterra integral equations of Urysohn type. J. Comput. Appl. Math. 2021, 398, 113628. [Google Scholar] [CrossRef]
- Cao, J.; Xu, C. A high order schema for the numerical solution of the fractional ordinary differential equations. J. Comput. Phys. 2013, 238, 154–168. [Google Scholar] [CrossRef]
- Cao, J.; Cai, Z. Numerical analysis of a high-order scheme for nonlinear fractional difffferential equations with uniform accuracy. Numer. Math. Theor. Meth. Appl. 2021, 14, 71–112. [Google Scholar] [CrossRef]
- Wu, C.; Wang, Z. The spectral collocation method for solving a fractional integro-differential equation. AIMS Math. 2021, 6, 9577–9587. [Google Scholar] [CrossRef]
- Maleknejad, K.; Hashemizadeh, E.; Ezzati, R. A new approach to the numerical solution of Volterra integral equations by using Bernstein’s approximation. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 647–655. [Google Scholar] [CrossRef]
- Rahma, A.; Evans, D. The numerical solution of Volterra integral equations on parallel computers. Int. J. Comput. Math. 2007, 27, 103–111. [Google Scholar] [CrossRef]
- Maleknejad, K.; Basirat, B.; Hashemizadeh, E. A Bernstein operational matrix approach for solving a system of high order linear Volterra-Fredholm integro-differential equations. Math. Comput. Model. 2012, 55, 1363–1372. [Google Scholar] [CrossRef]
- Odibat, Z. Differential transform method for solving Volterra integral equation with separable kernels. Math. Comput. Model. 2008, 48, 1144–1149. [Google Scholar] [CrossRef]
- Assari, P.; Dehghan, M. The approximate solution of nonlinear Volterra integral equations of the second kind using radial basis functions. Appl. Numer. Math. 2018, 131, 140–157. [Google Scholar] [CrossRef]
- Han, G.; Hayami, K.; Sugihara, K.; Wang, J. Extrapolation method of iterated collocation solution for two-dimensional nonlinear Volterra integral equations. Appl. Math. Comput. 2000, 112, 49–61. [Google Scholar]
- McKee, S.; Tang, T.; Diogo, T. An Euler-type method for two-dimensional Volterra integral equations of the first kind. IMA J. Numer. Anal. 2000, 20, 423–440. [Google Scholar] [CrossRef]
- Tari, A.; Rahimi, M.; Shahmorad, S.; Talati, F. Solving a class of two-dimensional linear and nonlinear Volterra integral equations by the differential transform method. J. Comput. Appl. Math. 2009, 228, 70–76. [Google Scholar] [CrossRef]
- Maleknejad, K.; Rashidinia, J.; Eftekhari, T. Existence, uniqueness, and numerical solutions for two-dimensional nonlinear fractional Volterra and Fredholm integral equations in a Banach space. Comput. Appl. Math. 2020, 39, 1–22. [Google Scholar] [CrossRef]
- Assari, P.; Dehghan, M. A meshless local discrete Galerkin (MLDG) scheme for numerically solving two-dimensional nonlinear Volterra integral equations. Appl. Math. Comput. 2019, 350, 249–265. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, J.; Wen, X. Two-dimensional Euler polynomials solutions of two-dimensional Volterra integral equations of fractional order. Appl. Numer. Math. 2021, 163, 77–95. [Google Scholar] [CrossRef]
- Khosrow, M.; Jalil, R.; Tahereh, E. Numerical solution of three-dimensional Volterra-Fredholm integral equations of the first and second kinds based on Bernstein’s approximation. Appl. Math. Comput. 2018, 339, 272–285. [Google Scholar]
- Zaky, M.; Ameen, I. A novel Jacob spectral method for multi-dimensional weakly singular nonlinear Volterra integral equations with nonsmooth solutions. Eng. Comput. 2021, 37, 2623–2631. [Google Scholar] [CrossRef]
- Ziqan, A.; Armiti, S.; Suwan, I. Solving three-dimensional Volterra integral equation by the reduced differential transform method. Int. J. Appl. Math. Res. 2016, 5, 103–106. [Google Scholar] [CrossRef] [Green Version]
- Bakhshi, M. Three-dimensional differential transform method for solving nonlinear three-dimensional Volterra integral equations. Int. J. Appl. Math. Comput. Sci. 2012, 4, 246–256. [Google Scholar] [CrossRef]
- Nawaz, R.; Ahsan, S.; Akbar, M.; Farooq, M.; Sulaiman, M.; Ullah, H.; Islam, S. Semi analytical solutions of second type of three-dimensional Volterra integral equations. Int. J. Appl. Comput. Math. 2020, 6, 3079–3096. [Google Scholar] [CrossRef]
- Mirzaee, F.; Hadadiyan, E.; Bimesl, S. Numerical solution for three-dimensional nonlinear mixed Volterra-Fredholm integral equations via three-dimensional block-pulse functions. Appl. Math. Comput. 2014, 237, 168–175. [Google Scholar] [CrossRef]
- Wang, Z.; Cui, J. Second-order two-scale method for bending behavior analysis of composite plate with 3-D periodic configuration and its approximation. Sci. China Math. 2014, 57, 1713–1732. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Q.; Cao, J. A higher-order numerical scheme for two-dimensional nonlinear fractional Volterra integral equations with uniform accuracy. Fractal Fract. 2022, 6, 314. [Google Scholar] [CrossRef]
- Cao, J.; Zhang, J.; Yang, X. Fully-discrete Spectral-Galerkin scheme with second-order time-accuracy and unconditionally energy stability for the volume-conserved phase-field lipid vesicle model. J. Comput. Appl. Math. 2022, 406, 113988. [Google Scholar] [CrossRef]
- Gu, X.; Wu, S. A parallel-in-time iterative algorithm for Volterra partial integro-differential problems with weakly singular kernel. J. Comput. Phys. 2022, 417, 109576. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| h | ||
|---|---|---|
| − | ||
| h | ||
|---|---|---|
| − | ||
| h | ||
|---|---|---|
| − | ||
| h | ||
|---|---|---|
| − | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.-Q.; Long, M.-D.; Cao, J.-Y. A High-Order Approximate Solution for the Nonlinear 3D Volterra Integral Equations with Uniform Accuracy. Axioms 2022, 11, 476. https://doi.org/10.3390/axioms11090476
Wang Z-Q, Long M-D, Cao J-Y. A High-Order Approximate Solution for the Nonlinear 3D Volterra Integral Equations with Uniform Accuracy. Axioms. 2022; 11(9):476. https://doi.org/10.3390/axioms11090476
Chicago/Turabian StyleWang, Zi-Qiang, Ming-Dan Long, and Jun-Ying Cao. 2022. "A High-Order Approximate Solution for the Nonlinear 3D Volterra Integral Equations with Uniform Accuracy" Axioms 11, no. 9: 476. https://doi.org/10.3390/axioms11090476
APA StyleWang, Z. -Q., Long, M. -D., & Cao, J. -Y. (2022). A High-Order Approximate Solution for the Nonlinear 3D Volterra Integral Equations with Uniform Accuracy. Axioms, 11(9), 476. https://doi.org/10.3390/axioms11090476