1. Introduction
In nature, stochastic phenomena are widespread, and many practical systems are not immune to their effects. Therefore, stochastic systems have been widely studied in many disciplines and engineering applications. For stochastic systems, stochastic control is essential. Stochastic control has achieved rapid development in theory in the past few decades, and its research results have been widely used in industry, economy, national defense, aerospace, and other fields, solving many practical problems. The most representative stochastic control methods are minimum variance control and linear quadratic Gaussian control, which effectively solve the mean control problem of linear systems [
1,
2]. However, these control methods are unable to suppress fluctuations generated from random factors, such as waves, track unevenness, voltage fluctuations, and vibrations of the vehicle engine.
To suppress these fluctuations, variance control is applied. However, the information contained in the mean and variance is limited and cannot express the complete dynamic characteristics of the system, which makes the desired goal difficult to achieve. Instead, the shape of the probability density function (PDF) is used to reflect the complete statistical characteristics of the random variable [
3,
4,
5]. Therefore, in random systems, studies that utilize the shape of the probability density function as the control object are more comprehensive and generate more accurate results than the mean and variance control.
There are numerous PDF shape control problems, such as food processing, the emergency vehicle damping system, and the flight control system. In 1998–2009, Wang, Guo and Luan et al. obtained many relevant research achievements [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. They mainly utilized B-sample approximation, minimum entropy control, and the linear matrix inequality (LMI) method for studying the PDF control problem. In 2012, Qian et al. addressed the complete statistical properties of discrete LQG and studied the moment control [
17]. The object in these studies is the linear stochastic system.
Stochastic systems exhibit strong or weak non-linear behavior caused by various non-linear factors, so most stochastic systems are non-linear [
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. Therefore, the research on PDF shape control has important value and significance in non-linear systems.
In recent years, a number of studies on PDF shape control for non-linear stochastic systems have emerged [
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40]. Forbes et al. suggested a shape control scheme of a steady-state PDF in discrete stochastic processes to approach the desired PDF by use of Gram–Charlier expansion [
28,
29,
30,
31]. For the ARMAX (AutoRegressive Moving Average with eXogenous inputs) system with nonlinear discrete bounded parameter uncertainty, Guo et al. achieved the PDF shape control of the system output [
32]. Zhu et al. put forward a method based on an equivalent non-linear system to obtain the approximate steady-state solution and designed a feedback control of non-linear stochastic systems so that the output’s PDF can track the target [
33]. Qian and Zhao used the abnormal integral method to transform the non-linear system and determined the tracking control of the PDF by seeking the approximate solution [
34]. Based on the relationship between the characteristic function and the probability density function, the PDF of the state response was reconstructed. In 2016, Yang et al. expressed the probability density function with an exponential function and used the FPK equation to find the derivatives of each order of the PDF [
35]. In another study, the shape control problem with a PDF was transformed into a tracking optimization problem, and the optimal control gain was obtained using a particle swarm optimization algorithm [
36]. In the reference [
37], the superimposed PDF with a number of Gaussian PDFs was constructed according to the target PDF. This allows for the tracking of the target PDF, and the controller function is able to pass through the FPK equation. In 2014, Wang et al. proposed a PDF shape control algorithm based on the PSO algorithm, which effectively solved the PDF shape control problem for non-linear stochastic systems [
38]. In 2015, a PDF shape control method was proposed using the linear least squares method for a class of non-linear stochastic systems with additive white Gaussian noise and polynomial form, overcoming the challenges of solving the FPK equation [
39]. In 2016, a piecewise linear PDF shape controller was developed for non-linear stochastic systems with polynomial form [
40]. This controller has fewer parameters and has recognizable advantages over polynomial controllers.
The above methods mainly solve the problem of PDF shape control for polynomial non-linear stochastic systems.
In this paper, we developed a PDF shape control method for any non-linear stochastic system based on hybrid logistic functions to approximate the target probability density function. First, the FPK equation was used to establish the functional relationship between the hybrid logistic PDF and the controller, and the optimal controller was obtained using an optimization method and the inner product of Hilbert space. Taking the probability density functions with unimodal and multimodal shapes as the target PDF, we compared the performance of our proposed approach against the MGC method and the EP method through simulation experiments. We then calculated and compared the mean, variance, and control error of the three methods.
The main innovations and improvements of the proposed approach are as follows:
- (1)
The obtained PDF shape controller can be suitable for different target PDFs.
- (2)
This method can be applied to any non-linear stochastic system and is no longer limited to polynomial non-linear stochastic systems.
- (3)
If the target PDF is asymmetric, this method can achieve a better control effect compared to other techniques.
- (4)
When obtaining the same control effect as the EP method, our approach has much fewer parameters to be solved and has a lower complexity.
The rest of the paper is arranged as follows.
Section 2 provides the problem statement, and the hybrid logistic function method is introduced in
Section 3. In
Section 4, we provide details on the derivation of the PDF shape controller based on the hybrid logistic probability density function.
Section 5 discusses sample simulations and calculation results. An analysis of results is conducted in
Section 6, and the research conclusions are presented in
Section 7.
3. PDF Shape Control Based on Hybrid Logistic Function Method
The PDF of the state variable corresponds to the steady-state solution of the FPK equation. However, the solution for the FPK equation is very difficult, and only under certain conditions can the exact solution be obtained. Therefore, we suggest a probability density function as the approximate solution of the FPK equation, which would be used to approximate a variety of target probability density functions . In this paper, the hybrid logistic probability density function was used as the approximate solution of the FPK equation to obtain the corresponding controller so that the PDF of the state variable tracks the target probability density function .
Logistic distribution is a continuous distribution defined by its location and scale parameters. The logistic distribution has a similar shape to the Gaussian distribution but with a longer tail. If the target PDF has a longer tail and higher crest, the hybrid logistic probability density function is more suitable as the approximate PDF of the state variable than the MGC method.
The logistic distribution function is:
where
is the location parameter and
is the scale parameter.
The corresponding probability density function is:
The following results are obtained by hybridizing the probability density functions of
N logistic functions:
where
is the weight coefficient of the
ith logistic function, such that
;
is the location parameter of the
ith logistic function; and
is the scale parameter of the
ith logistic function.
In order for the hybrid logistic probability density function
to track the target probability density function well, we constructed the following optimization problem:
where
e is the residual sum of squares of the target PDF and tracking PDF (i.e., the hybrid logistic probability density function),
is the maximum value of the state variable
x, and
is the minimum value of the state variable
x. Meanwhile,
e is used to calculate the control error.
4. Solving the PDF Shape Controller
For a stochastic non-linear system, the FPK equation can fully describe the dynamic evolution law of the probability density function
of the state
in time and space. Its specific form is:
where
is the power spectral density of Gaussian white noise and
is the controlled function of the state variable.
When the system response tends to be stable, the PDF of the steady-state response is independent of the initial conditions and time and satisfies the following steady-state FPK equation:
Based on the control system (
2),
in Equations (
7) and (
8) should meet the relationship:
Let
. Since
is a constant,
H is also a constant. When the hybrid logistic probability density function
is regarded as an approximate solution of the FPK equation, Equation (
7) can be transformed into:
Therefore, the steady-state FPK equation satisfying the hybrid logistic probability density function
is:
In Hilbert space, we usually define the inner product as:
Thus, we multiply both sides of Equation (
11) by the test functions
, and integrate both sides over the entire region simultaneously to obtain the following equation:
The introduction of the test function weakly solves the above integral so that the hybrid logistic function acts as the target probability density function in the weak sense and the error between them vanishes.
We choose
, and obtain the following equation set from (
13):
We solve the differential Equation (
14) and obtain all of the general solutions
. Then, the controller function
is obtained from Equation (
9) as:
Since the controller function structure is unknown, the structure of the function is not uniquely determined, which, in turn, increases the difficulty in solving the equation. Therefore, it is not easy to obtain the general solution of directly. In summary, we will make assumptions on the controller function structure so as to complete solving the controller.
If the non-linear function of the system is polynomial, the expression is:
We adopt common non-linear controllers given by the expression:
Therefore, we substitute the non-linear function (
16) and the controller function (
17) into Equation (
9) and obtain the following expression:
The order of the controller
is determined by the control requirements of the system. For ease of calculation, we assume that
. Then, we organize:
where
is known and
is unknown.
We take Equation (
19) and the best approximation hybrid logistic function
into Equation (
14) and choose
to solve for the unknowns in Equation (
19). Then, the final solution is obtained for the controller
:
where
is the optimal solution of the controller parameters
If the system function is in other forms, we need to make reasonable assumptions about the controller function according to the design requirements or the structure of the system equations, and then solve the controller in the same way. Therefore, this method is not limited to polynomial systems, but is applicable to any non-linear stochastic system.
5. Simulations
The proposed algorithm for the design of probability density function shape controller for nonlinear stochastic systems based on hybrid logistic functions is as follows:
Step 1. Specify N in the hybrid logistic function according to the shape of the target probability density function;
Step 2. Solve optimization problem (
6), obtain the values of parameters
,
, and
, and calculate
e;
Step 3. Judge whether e meets the precision requirement. If so, go to Step 4; otherwise, let and return to Step 2;
Step 4. If the system has a polynomial structure, design the controller
according to Equation (
17) and then bring it into Equation (
19); otherwise, design the controller
according to the system control requirements, and then bring it into (
9), thus determining the structure of
.
Step 5. Calculate
and choose a suitable value of
L in
. Determine the selection of
L by the number of unknown parameters in the controller
. Then, substitute
and
into (
14) together with the best approximate hybrid logistic function to obtain the controller parameters.
We consider two single-degree-of-freedom stochastic system models with Gaussian white noise. The first model is the polynomial system model and the second model is the non-polynomial system model.
For the polynomial system model:
For the non-polynomial system model:
For computational simplicity, the spectral density of is taken as , and is taken to be the initial state of the system.
To evaluate the performance of the PDF shape control method based on the hybrid logistic probability density function, we conducted simulation experiments. We used the probability density function with three kinds (unimodal, bimodal, and trimodal) as the target PDFs and used MGC, EP, and HLF methods to track the target PDFs for different shapes.
(1) Case 1
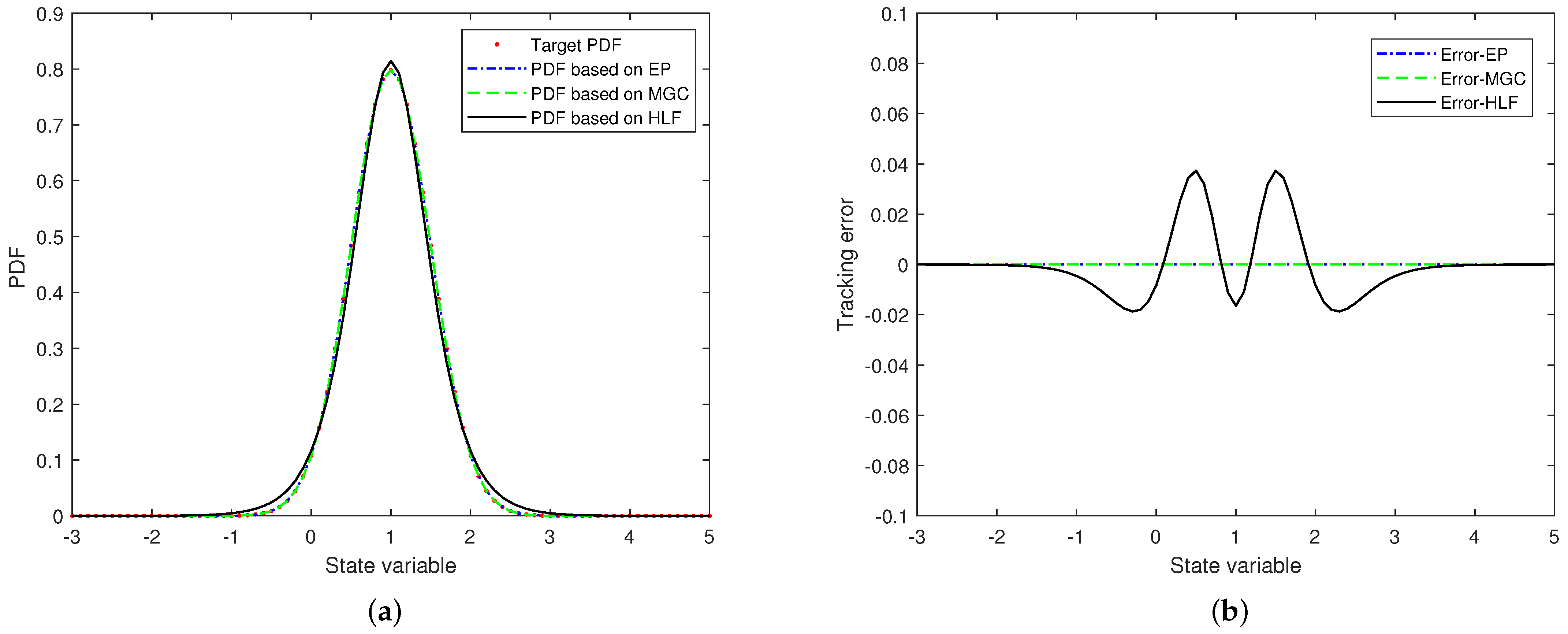
The target PDF Gaussian probability density function has a unimodal symmetric shape and is given by the mathematical expression:
where
and
.
The target PDF is first approximated using a hybrid logistic probability density function. Here, we used
and applied the non-linear least squares method to obtain the hybrid logistic PDF
using the formula:
➀ In the the polynomial system model:
Thus, we assume that the functional expression for the controller is:
Substitute (
25) and (
26) into (
19), generating:
Substituting (24) and (27) into (
14) and selecting
generates:
Solving the above equation yields:
Therefore, the optimal controller is:
➁ In the non-polynomial system model:
Thus, we assume that the functional expression for the controller is:
Then, we substitute the above equation into (
9), obtaining:
Substituting (24) and (32) into (
14) and selecting
generates:
Solving the above equation yields:
Then, the optimal controller is:
When the target PDF has a symmetric unimodal shape, the simulation results are as shown in
Figure 1.
Figure 1a is the PDF shape control effect of the state variable for the three methods, and
Figure 1b is the tracking error.
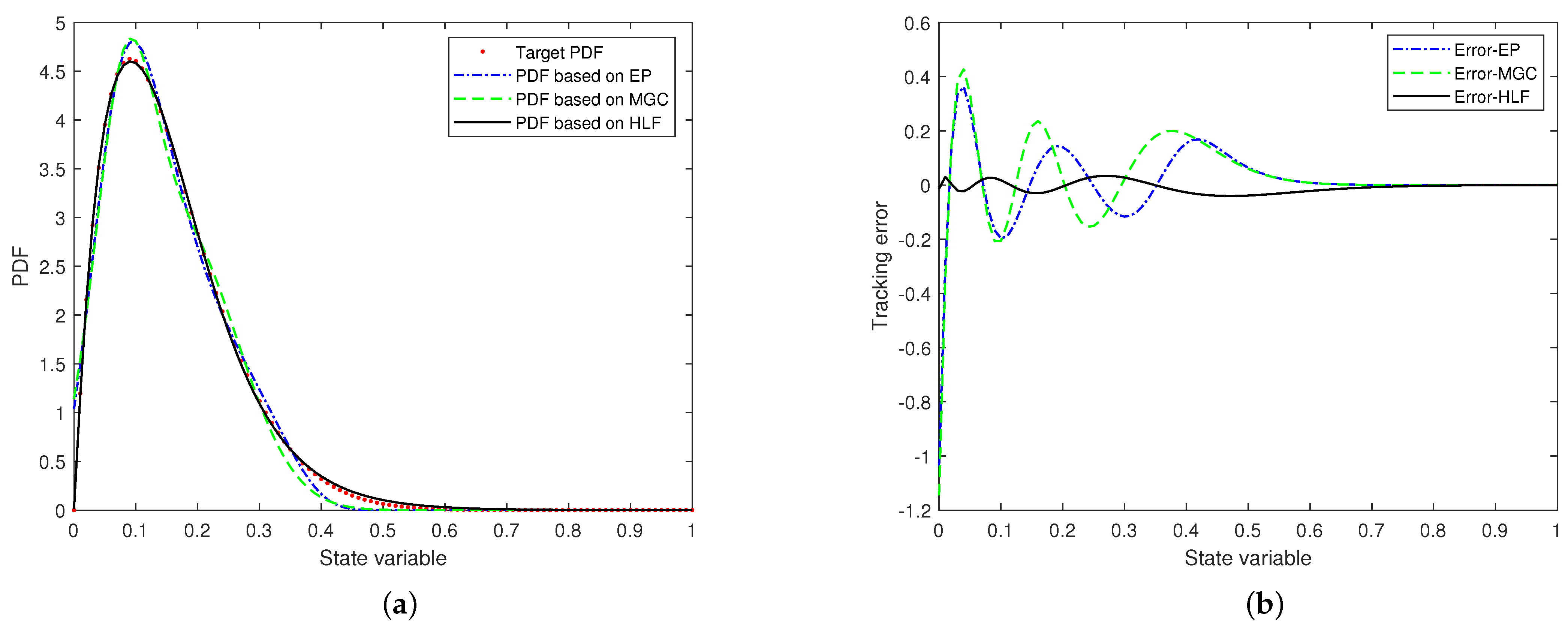
(2) Case 2
The target PDF beta probability density function has an asymmetric unimodal shape. The mathematical expression is:
where
B is the beta function for normalization purposes, such that the integral is 1.
In the hybrid logistic probability density function, taking
, the optimum is determined by the expression:
➀ In the the polynomial system model:
Select
, combine Equations (
27), (
28) and (
36), and solve
in the controller:
The optimal controller is:
➁ In the non-polynomial system model:
Select
, combine Equations (
32), (
33) and (
36), and solve
in the controller:
The optimal controller is:
When the target PDF has an asymmetric unimodal shape, the control effect and the tracking error are as shown in
Figure 2.
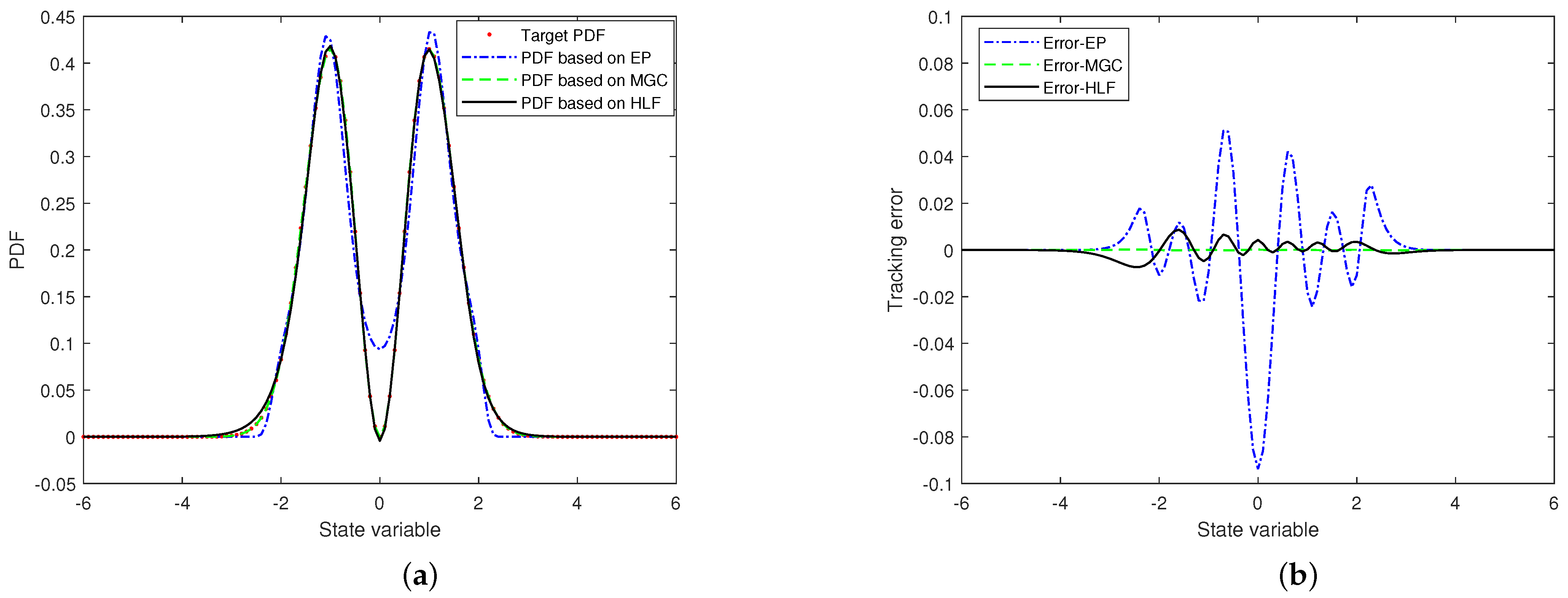
(3) Case 3
In Cases 1 and 2, the target PDF only behaves unimodal, whereas the actual system is generally required to be in a multimodal shape. For example, the following target PDF is bimodal in shape:
We take
in the hybrid logistic probability density function and obtain the optimal solution as:
➀ In the the polynomial system model:
Select
, combine Equations (
27), (
28) and (
40), and solve
in the controller:
The optimal controller is:
➁ In the non-polynomial system model:
Select
, combine Equations (
32), (
33) and (
40), and solve
in the controller:
The optimal controller is:
When the target PDF has a symmetric bimodal shape, the simulation results are as shown in
Figure 3, including the control effect and the error of the three methods on controlling the PDF shape of the state variable.
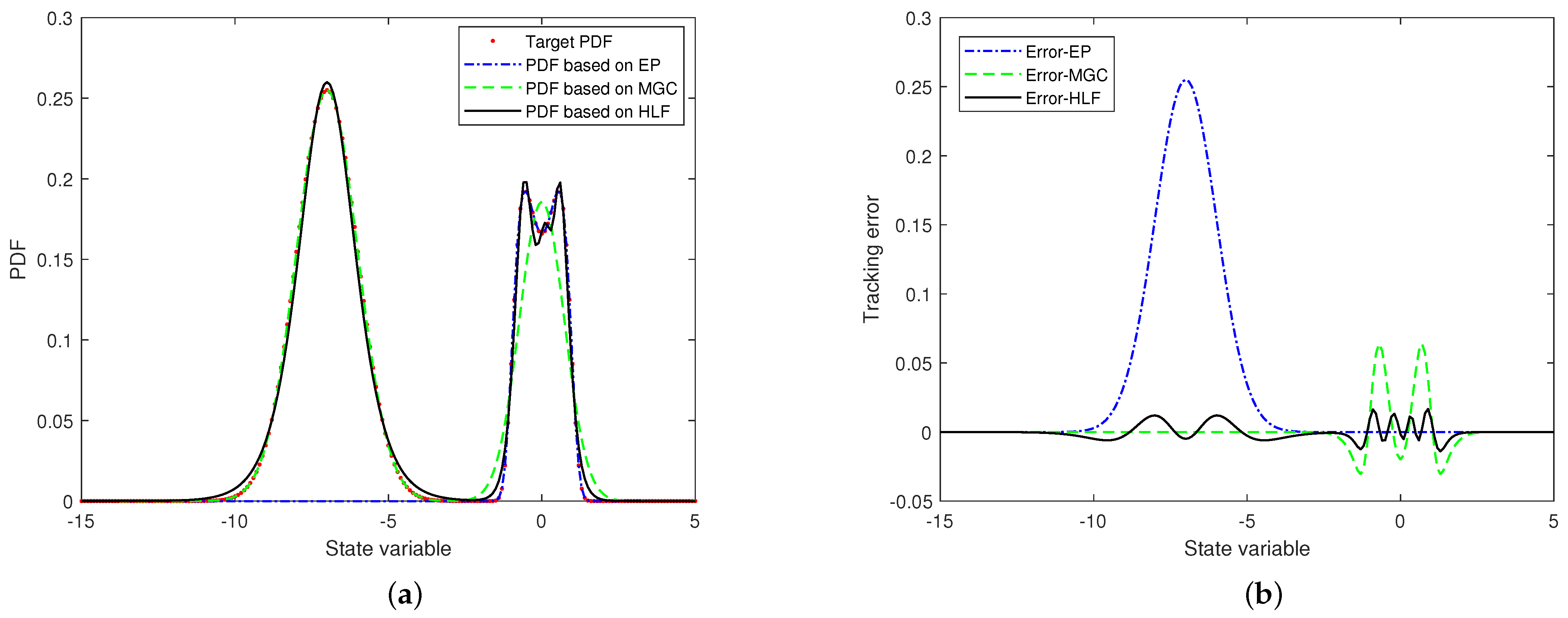
(4) Case 4
When we choose the target PDF to have a complex trimodal shape:
We take
in the hybrid logistic probability density function and obtain the optimal as:
➀ In the the polynomial system model:
Select
, combine Equations (
27), (
28) and (
44), and solve
in the controller:
The optimal controller is:
➁ In the non-polynomial system model:
Select
, combine Equations (
32), (
33) and (
40), and solve
in the controller:
The optimal controller is:
When the target PDF has a complex trimodal shape, the simulation results are as shown in
Figure 4.
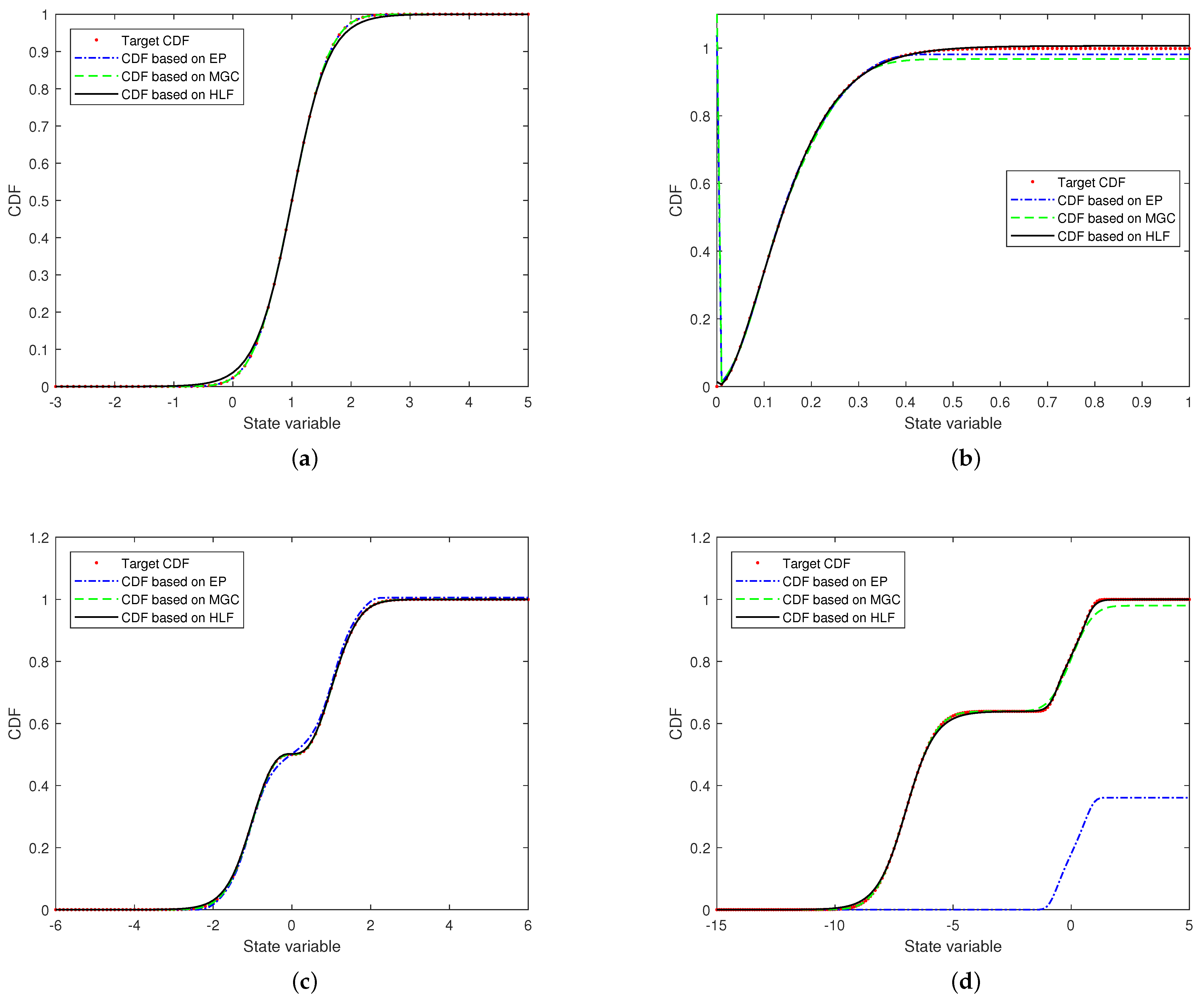
For the above four cases, in order to more clearly analyze and compare the PDF shape control performance of the three methods, we provide the cumulative distribution function (CDF) curves of the PDF from the three methods and the target PDF, as shown in
Figure 5a–d.
Table 1 and
Table 2 shows the calculated mean and variance using the different methods for the different target PDFs, while
Table 3 summarizes the control errors.
6. Result Analysis
As presented in the simulation results in
Figure 1,
Figure 2,
Figure 3,
Figure 4 and
Figure 5, the hybrid logistic probability density function method can better control the PDF shape of the state variables for the non-linear stochastic systems regardless of the target PDF being unimodal, bimodal, and complex trimodal- shaped.
When the target PDF has a Gaussian distribution, the MGC method and EP method have a better control effect than our method. However, the PDF shape obtained from our proposed approach matches the target PDF shape. In
Figure 2a, our method outperforms the other two methods when the target PDF has a beta distribution. The EP method came second, and the MGC method performed the worst. In
Figure 3a, when the target PDF is bimodal in shape and an equal number of parameters is used in the three methods, the control effect of the EP method is significantly inferior compared to the other two, with the MGC method performing slightly better than our method. However, if the number of parameters of the EP method is increased to 21, its control effect would be similar to the other two. When the target PDF has a complex trimodal shape, our method outperforms the others. The PDF shape of the state variable obtained by our proposed approach has the same trimodal shape as the target PDF, whereas the other two only showed bimodal forms. For this scenario, the MGC method and the EP method fail to achieve PDF shape control.
We analyze
Figure 1b,
Figure 2b,
Figure 3b and
Figure 4b and find that, when the target PDF has a Gaussian distribution, the tracking error of the EP method and MGC method is smaller than that of the HLF method. However, when the target has a beta distribution, the tracking error value of our method is significantly better than that of the EP method and the MGC method, and its error fluctuation is also much smaller. For the tracking error of a bimodal target PDF, the MGC method is the smallest, the HLF method is the second, and the EP method is the largest. If the target is a complex multimodal shape, the EP method has the largest fluctuation range in terms of the tracking error, and is therefore inferior to the MGC method and our method. Overall, when the target PDF is asymmetric or has a more complex trimodal shape, the resulting PDF from the HLF method tracks the target PDF significantly better than the other two methods.
The CDF curves in
Figure 5a show that the EP method and the MGC method have slightly better control effects than our method, but the differences between the three methods are small. The CDF curves in
Figure 5b,d also demonstrate that our proposed method has a more obvious advantage over the other two methods in terms of PDF shape performances. The CDF curves in
Figure 5c show that the MGC method works best, our method is second, and the EP method is last.
Analyzing the mean and variance of the PDFs in
Table 1 and
Table 2, in the first case, the mean values calculated from three methods and the target PDF are exactly the same. The variance values obtained by the MGC method and the EP method are equal to that of the target PDF, while there exists an error in the variance calculated by our method. This is because the expression of the state PDF in the two former methods is of exponential form, which is the same as the target PDF. In the second case, the mean and variance calculated by our method are closest to the mean and variance of the target PDF, which is consistent with the previous analysis. In the third case, the mean and variance computed by the MGC method are closer to the target PDF than those calculated by the other two approaches. In the fourth case, the mean and variance calculated by our proposed method are closest to the target PDF, with the MGC method being the next most effective and the EP method being the least effective. In contrast, the PDF obtained by our approach is trimodal, which is closest to the shape of the target PDF.
From the control errors in
Table 3, the EP method and the MGC method in the first case both have an error of 0, whereas the control error of our method is relatively larger. In the second and fourth cases, our method’s control error is significantly smaller than the other two approaches. In the third case, the MGC method has the smallest control error, followed by our proposed technique, and the EP method has the largest control error. However, the degrees of the control errors from our method are all no more than
for all four cases.
Based on the above analysis, the MGC method is more suitable for cases when the target PDF is symmetrical (the first and third cases). The EP method would require more parameters to be determined in order to obtain good control results. For the first scenario, the EP method required 3 parameters, whereas the other two approaches only needed 2. For the third scenario, when the same control effect was obtained, the EP method required 21 parameters, whereas the other two only required 11. Our method can achieve better control effects for various shapes of the target PDF. The focus of our control is the PDF shape of the state variable. In
Figure 1,
Figure 2,
Figure 3 and
Figure 4, although our method may not always yield the smallest errors, it ensures that the PDF shape of the state variable is consistent with the target PDF, thereby achieving the purpose of PDF shape control.
7. Conclusions
For non-linear stochastic systems, the state variables have random uncertainties, and the PDF shape of random variables completely characterizes the statistical properties of uncertain systems. In this paper, an innovative approach for controlling the PDF shape of non-linear stochastic systems was proposed. The method uses the hybrid logistic probability density function as an approximate target-tracking PDF of the state variable. After introducing the definition of inner product of Hilbert space, the hybrid logistic function is multiplied with the test function and integrated over the whole space, and then the optimal controller is obtained by solving the equation. This approach is applicable to arbitrary non-linear stochastic systems.
The simulation results show that the HLF method can achieve the purpose of PDF shape control regardless of if the target PDF shape is unimodal, bimodal, or trimodal. In particular, when the target PDF has an asymmetric distribution or complex trimodal shape, the proposed approach presents noticeable advantages over other techniques. Moreover, the method requires fewer parameters than the EP method when achieving the same control effect. For solving the controller, the solution is more difficult when the controller order is higher. Overall, the controller solution of polynomial systems is simpler than the non-polynomial system.
Although the proposed method can achieve good PDF control effects, the primary challenge is determining the optimization algorithm to obtain the global optimal solution for the parameters. In addition, the applicability of the method should be further evaluated for systems suffering from non-Gaussian white noise. These considerations will be explored and addressed in our subsequent studies.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}