
Systematic Review of Aggregation Functions Applied to Image Edge Detection

 , ,
, ,  ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
- 1.
- Fill this gap in the literature of systematic reviews on the topic;
- 2.
- Summarize the existing technology regarding methods that make use of those functions in digital image processing, more specifically regarding edge detection;
- 3.
- Identify the gaps in the detection approach using aggregation or pre-aggregation functions, proposing themes for future work.
2. Preliminaries
2.1. Aggregation and Pre-Aggregation Functions
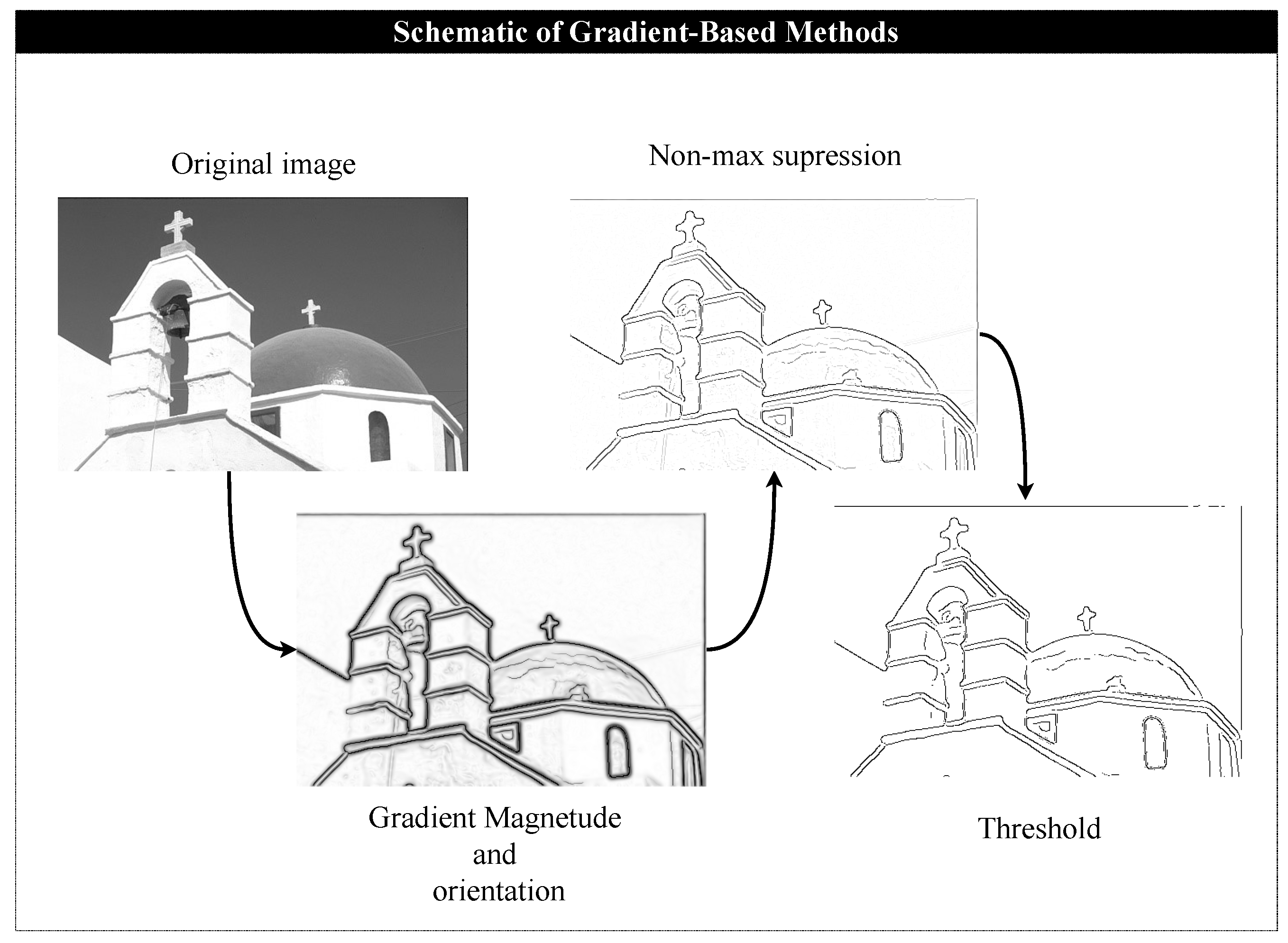
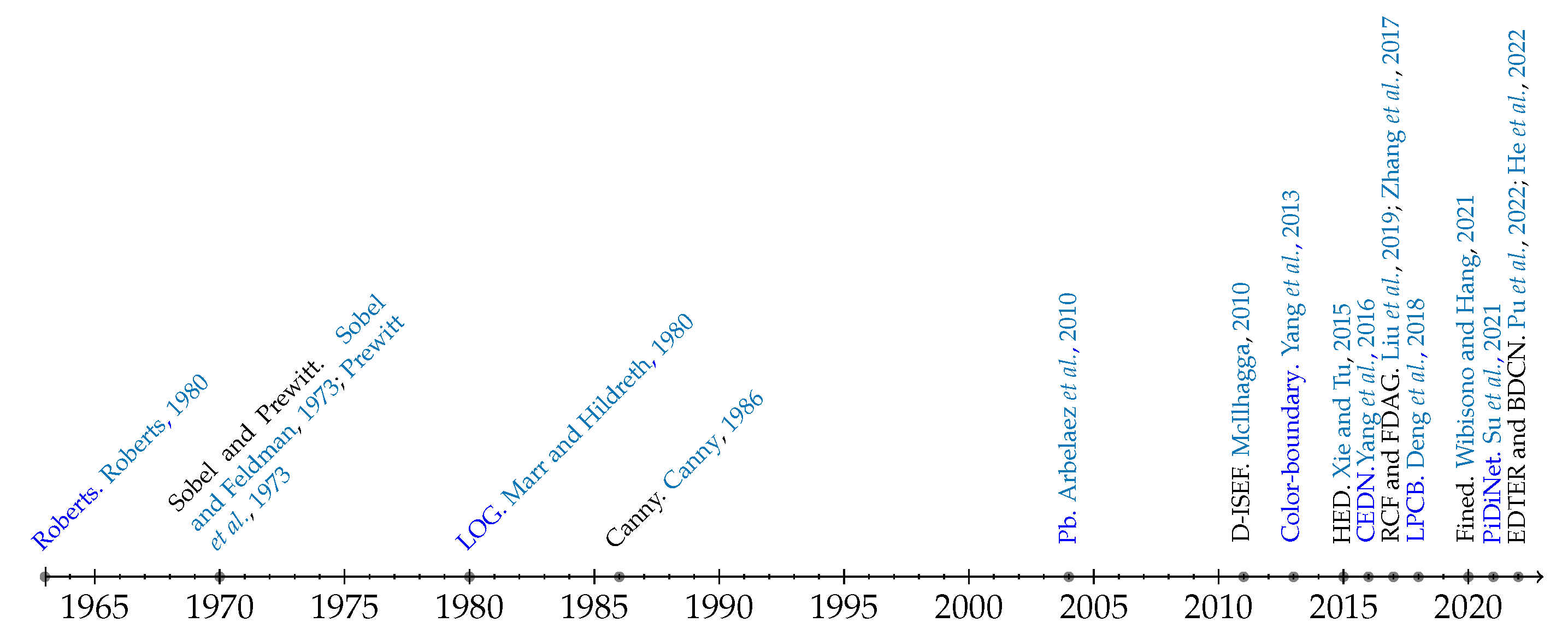
2.2. Gradient-Based Methods
- (i)
- Computation of the magnitude of the gradient and its orientation , using a kernel , (Table 1), with a first-order, vertical and horizontal derivative filter such as steerable Gaussian, oriented anisotropic Gaussian kernels, or a combination of two half-Gaussian kernels;
- (ii)
- Non-maximum suppression operation for thinner edges: selection of pixels with a local maximum gradient magnitude along the direction of the gradient, which is perpendicular to the orientation edge;
- (iii)
- Determination of the thresholds of the fine contours to obtain the contour map.
2.3. Region-Based Segmentation Methods
2.4. Methods Based on Machine Learning
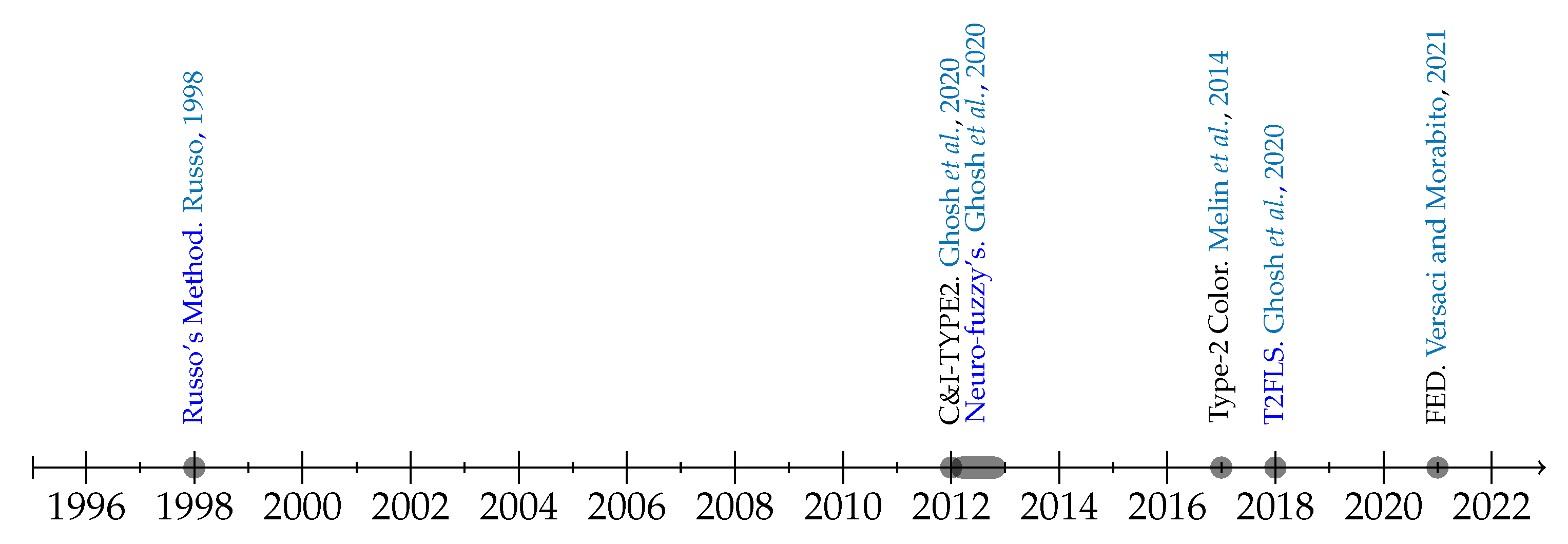
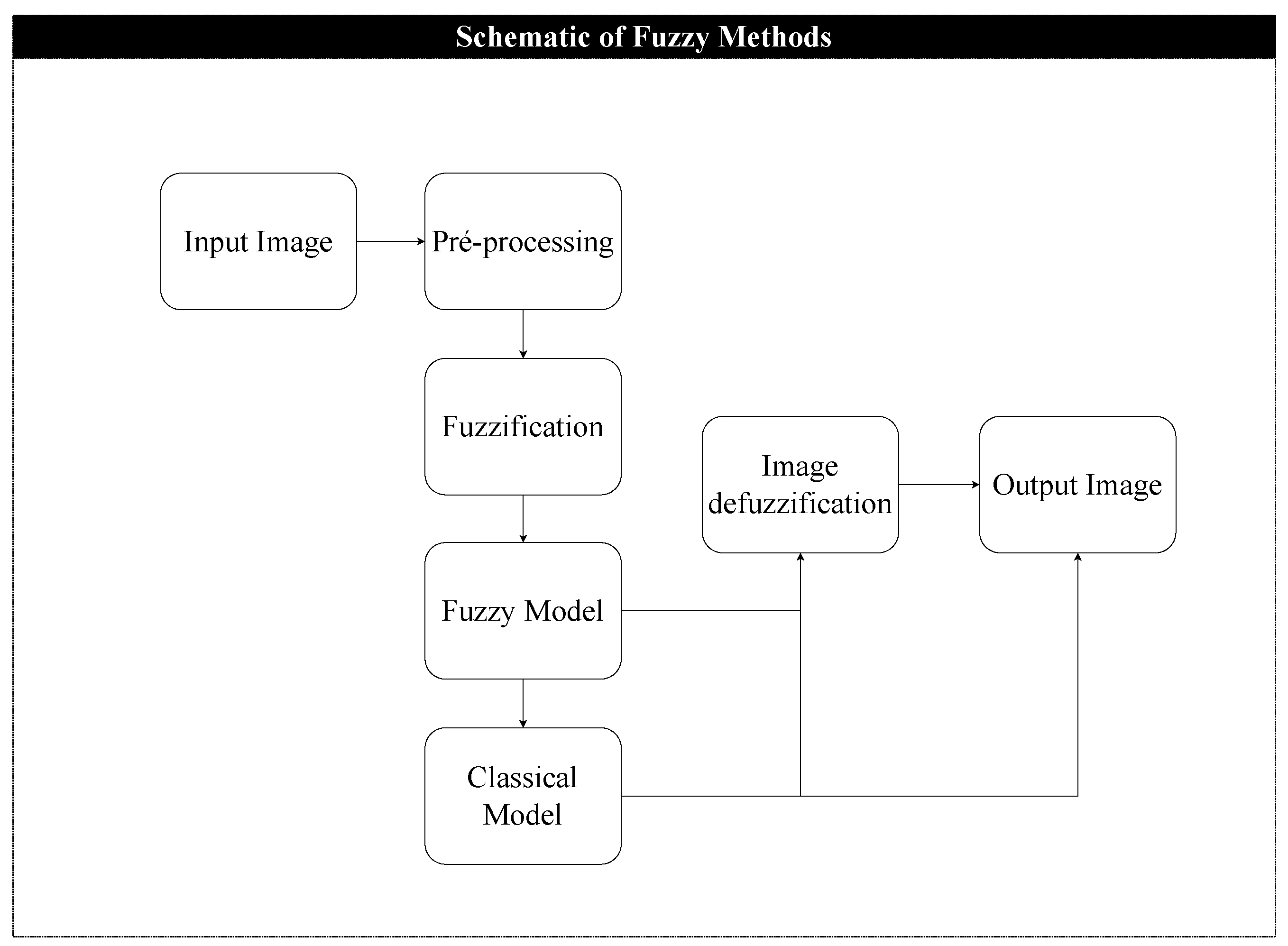
2.5. Fuzzy-Logic-Based Methods
3. Materials and Methods
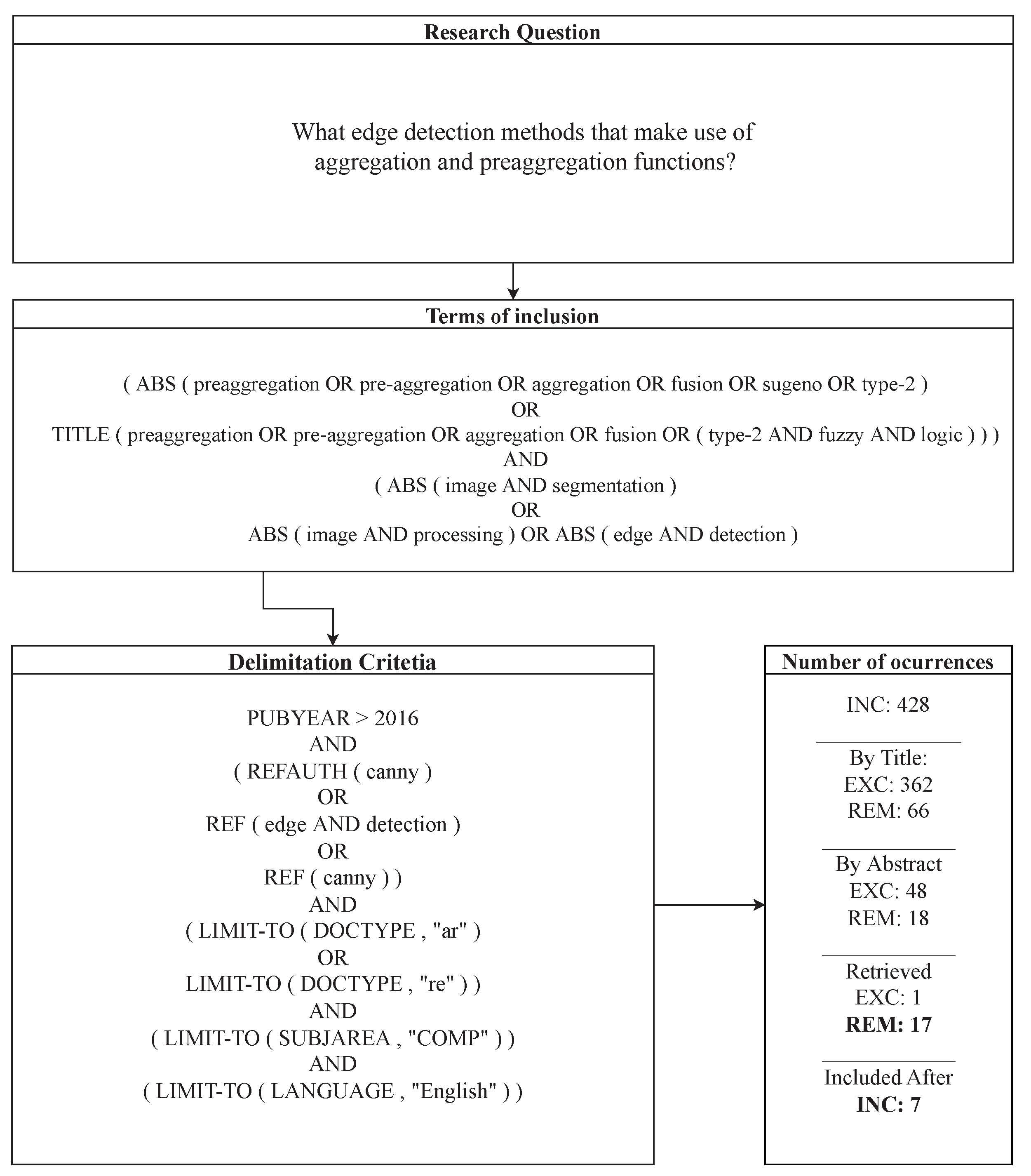
3.1. Systematic Literature Review Scope
3.2. Definition of Criteria, Search in Indexing Databases, and Obtaining Primary Research
- (i)
- “preaggregation” OR “pre-aggregation" OR “aggregation” OR “fusion” OR “Sugeno” OR “Type-2” that appear in the abstract OR;
- (ii)
- The terms of the item (i) joined to the terms “Fuzzy” and “Logic” concatenated with “Type-2” with the exception of “Sugeno” as terms that appear in the title;
- (iii)
- The terms of the items (i) and (ii) in conjunction with the terms “image” AND “segmentation” OR “image” AND “processing” OR “edge” AND “detection” as terms that appear in the abstract.
4. Results and Discussion

| Found Papers | Papers Included | Total Number of Reviewed Papers |
|---|---|---|
| [44,51,80,81,82,83,84,86,87,89,90,93,94,95,96,97,98] | [45,46,47,48,85,88,91] | 24 |
4.1. Summary of Methods
4.1.1. Multiple Descriptors Extraction and Aggregation
4.1.2. Based on the Aggregation of Distance Functions and FCM
- D is the number of data points;
- N is the number of clusters;
- m is a fuzzy partition matrix exponent for controlling the degree of fuzzy overlap, with m > 1. Fuzzy overlap refers to how fuzzy the boundaries between clusters are; that is, the number of data points that have significant membership in more than one cluster;
- is the degree of membership of in the jth cluster. For a given data point , the sum of the membership values for all clusters is one;
- is a measure of distance, which, in general, can vary according to the proposed approach, but is classically given by , where is a norm.
- (i)
- The intensity of pixels and , given by:and
- (ii)
- The average pixel in an eight-connected neighborhood, calculated as
4.1.3. Based on Fuzzy Set Theory: Type-2 Fuzzy and Neutrosophic Set
- (i)
- Multiple descriptors extraction and aggregation;
- (ii)
- Based on the aggregation of distance functions and FCM;
- (iii)
- Based on fuzzy set theory: type-2 fuzzy and neutrosophic sets.
- (i)
- These are methods that take direct inspiration from the way that the human visual system works, seeking to simulate, through feature extraction or the determination of local or global descriptors, the visual stimuli and the processing of information for the recognition of some pattern through aggregation or pre-aggregation functions.
- (ii)
- Functions that make use of weighing vectors and that enable a better modeling of nonlinear behavior, such as the Choquet integral, would perform better.
- (iii)
- Depth information is essential, especially when working with images with complex backgrounds or low contrast, the latter being an important feature in the performance of the models.
- (iv)
- Combining detection methods with aggregation methods or information fusion makes it possible to reduce information uncertainty and minimize redundancy, improve reliability, and maximize the information relevant to a task.
- (v)
- Works that link extraction and detection via clustering functions have not been found.
- (i)
- They are based on the importance of distance functions as decision criteria in data clustering algorithms;
- (ii)
- Aggregation and pre-aggregation functions are used to construct new distance functions from others that represent some dimension relevant to the problem;
- (iii)
- The papers are limited to application to a single clustering algorithm and do not make the performance of other methods clear.
5. Conclusions
- (i)
- Multiple descriptors extraction and aggregation;
- (ii)
- Based on the aggregation of distance functions and FCM;
- (iii)
- Based on fuzzy set theory: type-2 fuzzy and neutrosophic sets.
- (i)
- Fill an existing gap in the literature of systematic reviews on edge detection using clustering functions;
- (ii)
- Summarize the existing technology regarding methods that make use of these functions in edge detection;
- (iii)
- Identify the gaps in the detection approach using aggregation or pre-aggregation functions, proposing topics for future work and fulfilling the initial objectives of the research.
- (i)
- The application of the method of constructing distance functions by clustering functions in different data clustering techniques, such as DBscan, region growth, K-means, and others;
- (ii)
- Applying non-average aggregation functions for edge detection;
- (iii)
- The development of further work involving the modeling of W ganglion cells; in this sense, work with depth information, such as lidar sensors and others;
- (iv)
- Exploring the combination of aggregation functions, both in feature extraction and in information fusion;
- (v)
- The direct use of classical detectors in an ensemble fused by aggregation functions, also taking into account the fusion of descriptors and other visual cues, thus ensuring the participation of primitive shapes and the influence of contrast, color, and depth information, among others discussed here.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Suresh, K.; Srinivasa, P. Various Image Segmentation Algorithms: A Survey. In Smart Intelligent Computing and Applications; Springer: Singapore, 2019; Volume 105, pp. 233–239. [Google Scholar]
- Martin, D.R. An Empirical Approach to Grouping and Segmentation; University of California: Berkeley, CA, USA, 2002. [Google Scholar]
- Zhang, K.; Zhang, L.; Lam, K.M.; Zhang, D. A Level Set Approach to Image Segmentation With Intensity Inhomogeneity. IEEE Trans. Cybern. 2016, 46, 546–557. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.; Liang, X.; Chen, Y.; Shen, X.; Cheng, M.M.; Feng, J.; Zhao, Y.; Yan, S. STC: A Simple to Complex Framework for Weakly-Supervised Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2314–2320. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arbelaez, P.; Pont-Tuset, J.; Barron, J.; Marques, F.; Malik, J. Multiscale Combinatorial Grouping. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 328–335. [Google Scholar]
- Wang, X.F.; Huang, D.S.; Xu, H. An efficient local Chan–Vese model for image segmentation. Pattern Recognit. 2010, 43, 603–618. [Google Scholar] [CrossRef]
- Yang, M.H.; Kriegman, D.; Ahuja, N. Detecting faces in images: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 34–58. [Google Scholar] [CrossRef] [Green Version]
- Shotton, J.; Blake, A.; Cipolla, R. Multiscale Categorical Object Recognition Using Contour Fragments. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1270–1281. [Google Scholar] [CrossRef]
- Mohan, K.; Seal, A.; Krejcar, O.; Yazidi, A. Facial Expression Recognition Using Local Gravitational Force Descriptor-Based Deep Convolution Neural Networks. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Olson, C.; Huttenlocher, D. Automatic target recognition by matching oriented edge pixels. IEEE Trans. Image Process. 1997, 6, 103–113. [Google Scholar] [CrossRef] [Green Version]
- Vu, N.S.; Caplier, A. Enhanced Patterns of Oriented Edge Magnitudes for Face Recognition and Image Matching. IEEE Trans. Image Process. 2012, 21, 1352–1365. [Google Scholar]
- Drolia, U.; Guo, K.; Tan, J.; Gandhi, R.; Narasimhan, P. Cachier: Edge-Caching for Recognition Applications. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 276–286. [Google Scholar]
- Li, M.; Lin, Z.; Mech, R.; Yumer, E.; Ramanan, D. Photo-Sketching: Inferring Contour Drawings From Images. In Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa Village, HI, USA, 7–11 January 2019; pp. 1403–1412. [Google Scholar]
- Pavithra, L.; Sharmila, T.S. An efficient framework for image retrieval using color, texture and edge features. Comput. Electr. Eng. 2018, 70, 580–593. [Google Scholar] [CrossRef]
- Gordo, A.; Almazán, J.; Revaud, J.; Larlus, D. Deep Image Retrieval: Learning Global Representations for Image Search. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 241–257. [Google Scholar]
- Lin, K.; Yang, H.F.; Hsiao, J.H.; Chen, C.S. Deep learning of binary hash codes for fast image retrieval. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Boston, MA, USA, 7–12 June 2015; pp. 27–35. [Google Scholar]
- Radenovic, F.; Iscen, A.; Tolias, G.; Avrithis, Y.; Chum, O. Revisiting Oxford and Paris: Large-Scale Image Retrieval Benchmarking. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5706–5715. [Google Scholar]
- Zhao, Z.Q.; Huang, D.S.; Sun, B.Y. Human face recognition based on multi-features using neural networks committee. Pattern Recognit. Lett. 2004, 25, 1351–1358. [Google Scholar] [CrossRef]
- Chen, W.S.; Yuen, P.; Huang, J.; Dai, D.Q. Kernel Machine-Based One-Parameter Regularized Fisher Discriminant Method for Face Recognition. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2005, 35, 659–669. [Google Scholar] [CrossRef]
- Li, B.; Zheng, C.H.; Huang, D.S. Locally linear discriminant embedding: An efficient method for face recognition. Pattern Recognit. 2008, 41, 3813–3821. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, F.; Zhu, L.; Zhou, Z. Corner detection using Gabor filters. IET Image Process. 2014, 8, 639–646. [Google Scholar] [CrossRef]
- Zhang, W.C.; Shui, P.L. Contour-based corner detection via angle difference of principal directions of anisotropic Gaussian directional derivatives. Pattern Recognit. 2015, 48, 2785–2797. [Google Scholar] [CrossRef]
- Zhang, W.; Sun, C.; Breckon, T.; Alshammari, N. Discrete Curvature Representations for Noise Robust Image Corner Detection. IEEE Trans. Image Process. 2019, 28, 4444–4459. [Google Scholar] [CrossRef] [Green Version]
- Dollar, P.; Tu, Z.; Belongie, S. Supervised Learning of Edges and Object Boundaries. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition—Volume 2 (CVPR’06), Washington, DC, USA, 17–22 June 2006; Volume 2, pp. 1964–1971. [Google Scholar]
- Chi, Z.; Li, H.; Lu, H.; Yang, M.H. Dual Deep Network for Visual Tracking. IEEE Trans. Image Process. 2017, 26, 2005–2015. [Google Scholar] [CrossRef] [Green Version]
- Leal-Taixé, L.; Canton-Ferrer, C.; Schindler, K. Learning by Tracking: Siamese CNN for Robust Target Association. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 418–425. [Google Scholar]
- Xu, Y.; Brownjohn, J.; Kong, D. A non-contact vision-based system for multipoint displacement monitoring in a cable-stayed footbridge. Struct. Control. Health Monit. 2018, 25, e2155. [Google Scholar] [CrossRef] [Green Version]
- Ojha, S.; Sakhare, S. Image processing techniques for object tracking in video surveillance- A survey. In Proceedings of the 2015 International Conference on Pervasive Computing (ICPC), Pune, India, 8–10 January 2015; pp. 1–6. [Google Scholar]
- Muthalagu, R.; Bolimera, A.; Kalaichelvi, V. Lane detection technique based on perspective transformation and histogram analysis for self-driving cars. Comput. Electr. Eng. 2020, 85, 106653. [Google Scholar] [CrossRef]
- Abi Zeid Daou, R.; El Samarani, F.; Yaacoub, C.; Moreau, X. Fractional Derivatives for Edge Detection: Application to Road Obstacles. In Smart Cities Performability, Cognition, & Security; Springer International Publishing: Cham, Switzerland, 2020; pp. 115–137. [Google Scholar]
- Orhei, C.; Vert, S.; Vasiu, R. A Novel Edge Detection Operator for Identifying Buildings in Augmented Reality Applications. In Information and Software Technologies; Springer International Publishing: Cham, Switzerland, 2020; Volume 1283, pp. 208–219. [Google Scholar]
- Kühne, G.; Richter, S.; Beier, M. Motion-based segmentation and contour-based classification of video objects. In Proceedings of the 9th ACM International Conference on Multimedia—MULTIMEDIA ’01, Ottawa, ON, Canada, 30 September–5 October 2001; p. 41. [Google Scholar]
- Huang, Y.C.; Tung, Y.S.; Chen, J.C.; Wang, S.W.; Wu, J.L. An adaptive edge detection based colorization algorithm and its applications. In Proceedings of the 13th Annual ACM International Conference on Multimedia—MULTIMEDIA ’05, Hilton, Singapore, 6–11 November 2005; p. 351. [Google Scholar]
- Sun, T.H.; Lai, C.H.; Wong, S.K.; Wang, Y.S. Adversarial Colorization of Icons Based on Contour and Color Conditions. In Proceedings of the 27th ACM International Conference on Multimedia—MM ’19, Nice, France, 21–25 October 2019; pp. 683–691. [Google Scholar]
- Wharton, E.J.; Panetta, K.; Agaian, S.S. Logarithmic edge detection with applications. In Proceedings of the 2007 IEEE International Conference on Systems, Man and Cybernetics, Montreal, QC, Canada, 7–10 October 2007; pp. 3346–3351. [Google Scholar]
- Orujov, F.; Maskeliūnas, R.; Damaševičius, R.; Wei, W. Fuzzy based image edge detection algorithm for blood vessel detection in retinal images. Appl. Soft Comput. 2020, 94, 106452. [Google Scholar] [CrossRef]
- Tariq Jamal, A.; Ben Ishak, A.; Abdel-Khalek, S. Tumor edge detection in mammography images using quantum and machine learning approaches. Neural Comput. Appl. 2021, 33, 7773–7784. [Google Scholar] [CrossRef]
- Qiu, B.; Guo, J.; Kraeima, J.; Glas, H.H.; Zhang, W.; Borra, R.J.H.; Witjes, M.J.H.; van Ooijen, P.M.A. Recurrent Convolutional Neural Networks for 3D Mandible Segmentation in Computed Tomography. J. Pers. Med. 2021, 11, 492. [Google Scholar] [CrossRef] [PubMed]
- Sobel, I.; Feldman, G. A 3x3 isotropic gradient operator for image processing. In Pattern Classification and Scene Analysis; Duda, R., Hart, P., Eds.; John Wiley and Sons: Hoboken, NJ, USA, 1973; pp. 271–272. [Google Scholar]
- Marr, D.; Hildreth, E. Theory of edge detection. Proc. R. Soc. London Ser. B. Biol. Sci. 1980, 207, 187–217. [Google Scholar]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Jing, J.; Liu, S.; Wang, G.; Zhang, W.; Sun, C. Recent advances on image edge detection: A comprehensive review. Neurocomputing 2022, 503, 259–271. [Google Scholar] [CrossRef]
- Dimuro, G.P.; Fernández, J.; Bedregal, B.; Mesiar, R.; Sanz, J.; Lucca, G.; Bustince, H. The state-of-art of the generalizations of the Choquet integral: From aggregation and pre-aggregation to ordered directionally monotone functions. Inf. Fusion 2020, 57, 27–43. [Google Scholar] [CrossRef]
- Marco-Detchart, C.; Lucca, G.; Lopez-Molina, C.; De Miguel, L.; Pereira Dimuro, G.; Bustince, H. Neuro-inspired edge feature fusion using Choquet integrals. Inf. Sci. 2021, 581, 740–754. [Google Scholar] [CrossRef]
- Qiu, H.; Su, P.; Jiang, S.; Yue, X.; Zhao, Y.; Liu, J. Learning from Human Uncertainty by Choquet Integral for Optic Disc Segmentation. In Proceedings of the ACM International Conference Proceeding Series, Macau, China, 13–15 August 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 7–12. [Google Scholar]
- Pap, E.; Nedović, L.; Ralević, N. Image Fuzzy Segmentation Using Aggregated Distance Functions and Pixel Descriptors. Stud. Comput. Intell. 2021, 973, 255–273. [Google Scholar]
- Marco-Detchart, C.; Dimuro, G.; Sesma-Sara, M.; Castillo-Lopez, A.; Fernandez, J.; Bustince, H. Consensus image feature extraction with ordered directionally monotone functions. Commun. Comput. Inf. Sci. 2018, 831, 155–166. [Google Scholar]
- Ralević, N.; Delić, M.; Nedović, L. Aggregation of fuzzy metrics and its application in image segmentation. Iran. J. Fuzzy Syst. 2022, 19, 19–37. [Google Scholar]
- Aggarwal, P.; Mittal, H.; Samanta, P.; Dhruv, B. Review of Segmentation Techniques on Multi-Dimensional Images. In Proceedings of the 2018 International Conference on Power Energy, Environment and Intelligent Control, PEEIC 2018, Greater Noida, India, 13–14 April 2018; pp. 268–273. [Google Scholar]
- Dimuro, G.; Bustince, H.; Fernandez, J.; Sanz, J.; Lucca, G.; Bedregal, B. On the definition of the concept of pre-t-conorms. In Proceedings of the IEEE International Conference on Fuzzy Systems, Naples, Italy, 9–12 July 2017. [Google Scholar]
- Delić, M.; Nedović, L.; Pap, E. Extended power-based aggregation of distance functions and application in image segmentation. Inf. Sci. 2019, 494, 155–173. [Google Scholar] [CrossRef]
- Nedovic, L.; Ralevic, N.M.; Pavkov, I. Aggregated distance functions and their application in image processing. Soft Comput. 2018, 22, 4723–4739. [Google Scholar] [CrossRef]
- Beliakov, G.; Pradera, A.; Calvo, T. Aggregation Functions: A Guide for Practitioners; Springer: Berlin, Germany, 2007. [Google Scholar]
- Bustince, H.; Mesiar, R.; Kolesárová, A.; Dimuro, G.; Fernandez, J.; Diaz, I.; Montes, S. On some classes of directionally monotone functions. Fuzzy Sets Syst. 2020, 386, 161–178. [Google Scholar] [CrossRef]
- Lucca, G.; Sanz, J.A.; Dimuro, G.P.; Bedregal, B.; Mesiar, R.; Kolesárová, A.; Bustince, H. Preaggregation Functions: Construction and an Application. IEEE Trans. Fuzzy Syst. 2016, 24, 260–272. [Google Scholar] [CrossRef]
- Mubashar, M.; Khan, N.; Sajid, A.; Javed, M.; Hassan, N. Have We Solved Edge Detection? A Review of State-of-the-art Datasets and DNN based Techniques. IEEE Access 2022, 10, 70541–70552. [Google Scholar] [CrossRef]
- Ghosh, C.; Majumder, S.; Ray, S.; Datta, S.; Mandal, S.N. Different EDGE Detection Techniques: A Review. In Electronic Systems and Intelligent Computing; Mallick, P.K., Meher, P., Majumder, A., Das, S.K., Eds.; Springer Singapore: Singapore, 2020; pp. 885–898. [Google Scholar]
- Grabisch, M.; Marichal, J.; Mesiar, R.; Pap, E. Aggregation Functions; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Agrawal, A.; Bhogal, R.K. A Review—Edge Detection Techniques in Dental Images. In Proceedings of the International Conference on ISMAC in Computational Vision and Bio-Engineering (ISMAC-CVB), Palladam, India, 16–17 May 2018; Pandian, D., Fernando, X., Baig, Z., Shi, F., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 1359–1378. [Google Scholar]
- Magnier, B.; Abdulrahman, H.; Montesinos, P. A review of supervised edge detection evaluation methods and an objective comparison of filtering gradient computations using hysteresis thresholds. J. Imaging 2018, 6, 74. [Google Scholar] [CrossRef] [Green Version]
- McIlhagga, W. The Canny Edge Detector Revisited. Int. J. Comput. Vis. 2010, 91, 251–261. [Google Scholar] [CrossRef] [Green Version]
- Yang, K.; Gao, S.; Li, C.; Li, Y. Efficient Color Boundary Detection with Color-Opponent Mechanisms. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Zhang, W.; Zhao, Y.; Breckon, T.P.; Chen, L. Noise robust image edge detection based upon the automatic anisotropic Gaussian kernels. Pattern Recognit. 2017, 63, 193–205. [Google Scholar] [CrossRef] [Green Version]
- Prewitt, J.M. Object enhancement and extraction. Pict. Process. Psychopictorics 1970, 10, 15–19. [Google Scholar]
- Roberts, J. Machine Percept 3D Solids; Dissertations-G: Cambridge, MA, USA, 1980. [Google Scholar]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 898–916. [Google Scholar] [CrossRef] [Green Version]
- Xie, S.; Tu, Z. Holistically-Nested Edge Detection. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Yang, J.; Price, B.; Cohen, S.; Lee, H.; Yang, M.H. Object Contour Detection with a Fully Convolutional Encoder-Decoder Network. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Liu, Y.; Cheng, M.M.; Hu, X.; Bian, J.W.; Zhang, L.; Bai, X.; Tang, J. Richer Convolutional Features for Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 1939–1946. [Google Scholar] [CrossRef] [Green Version]
- Deng, R.; Shen, C.; Liu, S.; Wang, H.; Liu, X. Learning to Predict Crisp Boundaries. In Proceedings of the Computer Vision—ECCV 2018, Munich, Germany, 8–14 September 2018; pp. 570–586. [Google Scholar]
- He, J.; Zhang, S.; Yang, M.; Shan, Y.; Huang, T. BDCN: Bi-Directional Cascade Network for Perceptual Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 100–113. [Google Scholar] [CrossRef] [PubMed]
- Wibisono, J.K.; Hang, H.M. Fined: Fast Inference Network for Edge Detection. In Proceedings of the 2021 IEEE International Conference on Multimedia and Expo (ICME), Shenzhen, China, 5–9 July 2021. [Google Scholar]
- Pu, M.; Huang, Y.; Liu, Y.; Guan, Q.; Ling, H. EDTER: Edge Detection with Transformer. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]
- Su, Z.; Liu, W.; Yu, Z.; Hu, D.; Liao, Q.; Tian, Q.; Pietikainen, M.; Liu, L. Pixel Difference Networks for Efficient Edge Detection. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 11–17 October 2021. [Google Scholar]
- Russo, F. Edge detection in noisy images using fuzzy reasoning. IEEE Trans. Instrum. Meas. 1998, 47, 1102–1105. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy sets. Inf. Control. 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Versaci, M.; Morabito, F.C. Image Edge Detection: A New Approach Based on Fuzzy Entropy and Fuzzy Divergence. Int. J. Fuzzy Syst. 2021, 23, 918–936. [Google Scholar] [CrossRef]
- Melin, P.; Gonzalez, C.I.; Castro, J.R.; Mendoza, O.; Castillo, O. Edge-Detection Method for Image Processing Based on Generalized Type-2 Fuzzy Logic. IEEE Trans. Fuzzy Syst. 2014, 22, 1515–1525. [Google Scholar] [CrossRef]
- Kitchenham, B.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; Technical Report EBSE-2007-01; Keele University and University of Durham: Durham, UK, 2007. [Google Scholar]
- Zhang, Y.; Wang, H.; Zhou, H.; Deng, P. A mixture model for image boundary detection fusion. IEICE Trans. Inf. Syst. 2018, E101D, 1159–1166. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Lv, J.; Bo, J.; Zhao, B.; Zheng, K.; Zhao, Y.; Tao, J.; Qin, Y.; Wang, W.; Liang, J. An Improved Wavelet Modulus Algorithm Based on Fusion of Light Intensity and Degree of Polarization. Appl. Sci. 2022, 12, 3558. [Google Scholar] [CrossRef]
- Lin, C.; Wang, Q.; Wan, S. DXYW: A depth-guided multi-channel edge detection model. Signal Image Video Process. 2023, 17, 481–489. [Google Scholar] [CrossRef]
- Ge, Y.; Zhang, C.; Wang, K.; Liu, Z.; Bi, H. WGI-Net: A weighted group integration network for RGB-D salient object detection. Comput. Vis. Media 2021, 7, 115–125. [Google Scholar] [CrossRef]
- Fang, A.; Zhao, X.; Zhang, Y. Cross-modal image fusion guided by subjective visual attention. Neurocomputing 2020, 414, 333–345. [Google Scholar] [CrossRef]
- Bentkowska, U.; Kepski, M.; Mrukowicz, M.; Pekala, B. New fuzzy local contrast measures: Definitions, evaluation and comparison. In Proceedings of the IEEE International Conference on Fuzzy Systems, Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Yang, Y.; Wu, J.; Huang, S.; Fang, Y.; Lin, P.; Que, Y. Multimodal Medical Image Fusion Based on Fuzzy Discrimination with Structural Patch Decomposition. IEEE J. Biomed. Health Inform. 2019, 23, 1647–1660. [Google Scholar] [CrossRef]
- Flores-Vidal, P.; Gómez, D.; Castro, J.; Montero, J. New Aggregation Approaches with HSV to Color Edge Detection. Int. J. Comput. Intell. Syst. 2022, 15, 78. [Google Scholar] [CrossRef]
- Nagarajan, D.; Lathamaheswari, M.; Kavikumar, J.; Hamzha, A. A Type-2 Fuzzy in image extraction for DICOM image. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 351–362. [Google Scholar] [CrossRef] [Green Version]
- Nagarajan, D.; Lathamaheswari, M.; Sujatha, R.; Kavikumar, J. Edge Detection on DICOM Image using Triangular Norms in Type-2 Fuzzy. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 462–475. [Google Scholar] [CrossRef] [Green Version]
- Martinez, G.E.; Gonzalez, I.C.; Mendoza, O.; Melin, P. General Type-2 Fuzzy Sugeno Integral for Edge Detection. J. Imaging 2019, 8, 71. [Google Scholar] [CrossRef] [Green Version]
- Ljubo, N.; Marija, D.; Ralević, N.M. OWA aggregated distance functions and their application in image segmentation. In Proceedings of the IEEE 16TH International Symposium on Intelligent Systems and Informatics (SISY 2018), Subotica, Serbia, 13–15 September 2018; pp. 311–316. [Google Scholar]
- Ralević, N.; Nedović, L.; Krstanović, L.; Ilić, V.; Dragić, D. Color Image Segmentation Using Distance Functions Based on Aggregation of Pixels Colors. In Intelligent and Fuzzy Techniques for Emerging Conditions and Digital Transformation; Kahraman, C., Cebi, S., Cevik Onar, S., Oztaysi, B., Tolga, A.C., Sari, I.U., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 717–724. [Google Scholar]
- Li, F.; Lin, C.; Zhang, Q.; Wang, R. A biologically Inspired Contour Detection Model Based on Multiple Visual Channels and Multi-Hierarchical Visual Information. IEEE Access 2020, 8, 15410–15422. [Google Scholar] [CrossRef]
- Kaur, G.; Garg, H. A new method for image processing using generalized linguistic neutrosophic cubic aggregation operator. Complex Intell. Syst. 2022, 8, 4911–4937. [Google Scholar] [CrossRef]
- Gudipalli, A.; Mandava, S.; Sudheer, P.; Saravanan, M. Hybrid colour infrared image edge detection using RGB-YCbCr image fusion. Int. J. Adv. Sci. Technol. 2019, 28, 101–108. [Google Scholar]
- Lopez-Molina, C.; Montero, J.; Bustince, H.; De Baets, B. Self-adapting weighted operators for multiscale gradient fusion. Inf. Fusion 2018, 44, 136–146. [Google Scholar] [CrossRef]
- Hait, S.; Mesiar, R.; Gupta, P.; Guha, D.; Chakraborty, D. The Bonferroni mean-type pre-aggregation operators construction and generalization: Application to edge detection. Inf. Fusion 2022, 80, 226–240. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, N.; Yan, H.; Zuo, M.; Liu, C. Using Local Edge Pattern Descriptors for Edge Detection. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1850006. [Google Scholar] [CrossRef]
- Choquet, G. Theory of Capacities. Ann. l’Inst. Fourier 1954, 5, 131–295. [Google Scholar] [CrossRef] [Green Version]
- Klement, E.P.; Mesiar, R.; Pap, E. Triangular Norms; Kluwer Academic Publisher: Dordrecht, The Netherland, 2000. [Google Scholar]
- Yager, R.R. On Ordered Weighted Averaging Aggregation Operators in Multicriteria Decisionmaking. IEEE Trans. Syst. Man, Cybern. 1988, 18, 183–190. [Google Scholar] [CrossRef]
- Bezdek, J.C. Pattern Recognition with Fuzzy Objective Function Algorithms; Springer: Berlin/Heidelberg, Germany, 1981. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


| Operator Type | Fixed Operator | Filter-Oriented | Half-Gaussian Kernels |
|---|---|---|---|
| Magnitude of gradient | |||
| Gradient direction |
| Multiple Descriptors Extraction and Aggregation | Based on Aggregation of Distance Functions and FCM | Based on Fuzzy Theory: Type-2 Fuzzy and Neutrosophic Set |
|---|---|---|
| [44,45,47,80,81,82,83,84,85,86,87,93,95,96,97,98] | [46,48,51,52,91] | [88,89,90,94] |
| Ref. | Aggregation | Measures | Clustering Algorithm | |
|---|---|---|---|---|
| [91] | OWA | e | 1 | |
| [48] | GQ-AM | 2 | ||
| [51] | EPP and EWAMP | 3 | FCM | |
| [46] | OWA and PP and WAMP | 3 | ||
| [52] | AOOCC | ; ; and, | 4 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amorim, M.; Dimuro, G.; Borges, E.; Dalmazo, B.L.; Marco-Detchart, C.; Lucca, G.; Bustince, H. Systematic Review of Aggregation Functions Applied to Image Edge Detection. Axioms 2023, 12, 330. https://doi.org/10.3390/axioms12040330
Amorim M, Dimuro G, Borges E, Dalmazo BL, Marco-Detchart C, Lucca G, Bustince H. Systematic Review of Aggregation Functions Applied to Image Edge Detection. Axioms. 2023; 12(4):330. https://doi.org/10.3390/axioms12040330
Chicago/Turabian StyleAmorim, Miqueias, Gracaliz Dimuro, Eduardo Borges, Bruno L. Dalmazo, Cedric Marco-Detchart, Giancarlo Lucca, and Humberto Bustince. 2023. "Systematic Review of Aggregation Functions Applied to Image Edge Detection" Axioms 12, no. 4: 330. https://doi.org/10.3390/axioms12040330
APA StyleAmorim, M., Dimuro, G., Borges, E., Dalmazo, B. L., Marco-Detchart, C., Lucca, G., & Bustince, H. (2023). Systematic Review of Aggregation Functions Applied to Image Edge Detection. Axioms, 12(4), 330. https://doi.org/10.3390/axioms12040330