
Regularization of the Boundary Equilibrium Bifurcation in Filippov System with Rich Discontinuity Boundaries

Abstract
:1. Introduction
2. Preliminaries
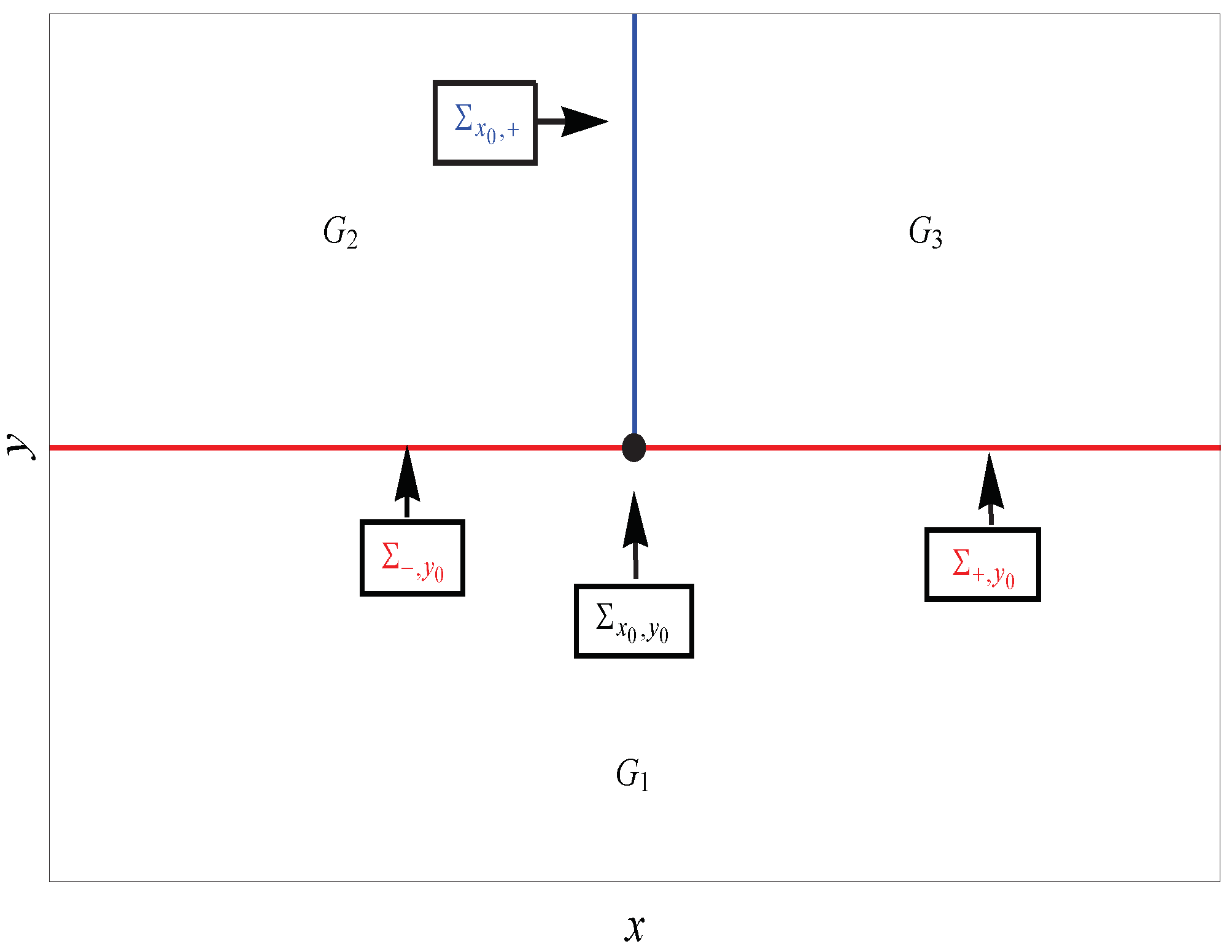
2.1. Definition of a Filippov System with Rich Boundaries
- The sliding region: ,
- The crossing region: ,
2.2. Definition of Equilibria
2.3. Description of the Regularization Method
2.4. Geometric Singular Perturbation Theory
2.5. Description of the Boundary Equilibrium Bifurcations
- Boundary Equilibrium Bifurcations:
- Persistence:A branch of admissible equilibria firstly turns into a boundary equilibrium, and then a branch of pseudoequilibria as the parameter varies;
- Nonsmooth fold bifurcation:A branch of admissible equilibria collides with a pseudoequilibrium, then becomes a boundary point, and then both disappear as the parameter varies.
3. Main Results and Examples
- For the subsystem with the boundary , its regularization is given by
- For with the boundary , its regularization is
- For with the boundary , its regularization is
3.1. The Filippov Plant Disease Model
- When , no control strategy is taken;
- When , infected branches are cut off at a rate of , and disease-free trees are replanted at a rate of ;
- When , infected branches are removed at a rate of ,
3.1.1. Equilibria and Bifurcation
- When and , system (16) has an asymptotically stable focus, a center equilibrium, and a pseudosaddle;
- When and , the center equilibrium is preserved, while the other two points collide and turn into a boundary equilibrium of the vector field ;
- When and , system (16) only has a center equilibrium.
3.1.2. Regularization
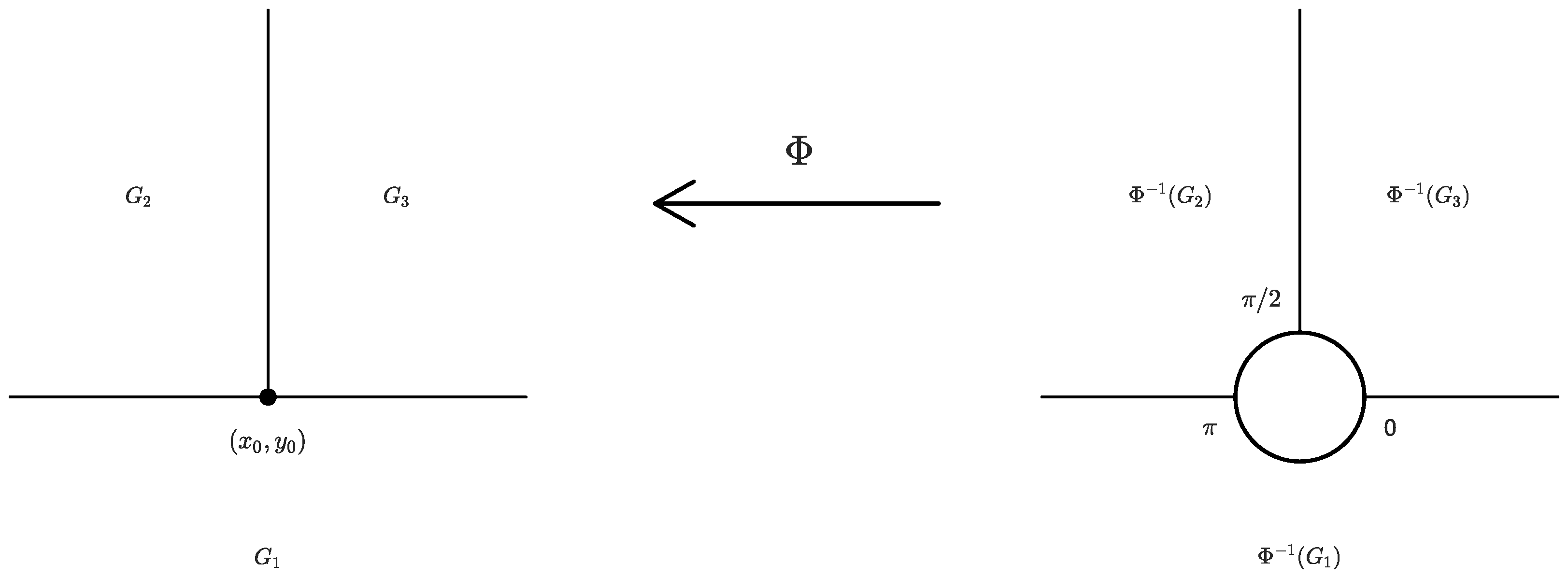
- Case I.For the nonsimple discontinuity , we first transform it into a simple discontinuity. To this end, we consider the mapThen, the discontinuous vector field induced by on has only simple discontinuities, and it is determined by the smooth vector fields on , ; see Figure 2. More details about the map are provided in [11,14,47].Figure 2. There is a nonsimple discontinuity on the left. There are only simple discontinuities on the right.Figure 2. There is a nonsimple discontinuity on the left. There are only simple discontinuities on the right.
![Axioms 13 00186 g002]() The dynamics of the point are given by the map with . In the new coordinates , it is direct to computeAfter performing the time scaling , thenwhere , . Substituting the specific form of , for , , the dynamics are given byfor , , the dynamics arefor , , the dynamics areExcept for the nonsimple discontinuity , the regularization method [27] can be applied to the other boundaries directly.
The dynamics of the point are given by the map with . In the new coordinates , it is direct to computeAfter performing the time scaling , thenwhere , . Substituting the specific form of , for , , the dynamics are given byfor , , the dynamics arefor , , the dynamics areExcept for the nonsimple discontinuity , the regularization method [27] can be applied to the other boundaries directly. - Case II.For the Filippov systemwith the boundary . Applying the regularization approach [27], the regularized vector field isThat is,Now, is represented by . The slow manifold is given by , i.e., . The slow manifold is a curve that connects and .
- Case III.For the Filippov systemwith the boundary , its regularized system isi.e.,After performing transformation (22), system (24) is transformed into a singular perturbation problem:For , the slow manifold is given byi.e., . Since our discussion is under the condition and , it gives . Thus, there is no slow manifold.
- Case IV.For the Filippov systemwith the boundary , the regularized system isi.e.,After performing the transformationwhere and , system (26) is changed into a singular perturbation problemFor , the slow manifold is given byi.e., . Taking account of condition (18), it gives , so the slow manifold does not exist.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- When and , the stable focus in region and the center equilibrium in region are preserved, while the pseudosaddle point on becomes a saddle in region after regularization;
- When and , the center equilibrium in region is preserved. After regularization, the boundary equilibrium of , , is preserved but located at , where ;
- When and , the regularized system only has a center equilibrium in region .
3.1.3. Simulation Results
- Case I.Compared with the analysis in Section 3.1.2, the dynamics of the singular point can be discussed in three different regions.For ,For ,For ,
- Case II.In region , the slow manifold is given bywhich is a curve that connects and . However, the point is not normally hyperbolic sinceTherefore, it needs additional blow-up. First of all, this point is translated to the origin by . Then, we perform the blowing up , with and . With the new coordinates, it gives the following:where . It is easy to check that and . Since , the angle component on the blowing up locus is decreasing for .
- Case III.In region , the slow manifold does not exist.
- Case IV.In region , the slow manifold does not exist.
- For the case , choosing since under the chosen parameter values, from the analysis of case I, we have the following on the circle:
- When , . Thus, is decreasing;
- When , . Then, for , while for . Here is given by ;
- When , . Then, for , while for , where is defined as the same as the previous case. When , .
In region , from the analysis of case II, it is easy to compute that the reduced problem has an equilibrium at , and . The flow goes in the positive direction of the x-axis if and in the negative direction of the x-axis if ; see Figure 5a. - When , on the circle, we have the following:
- When , ;
- When , . Then, for , while for , where ;
- When , . Therefore, for , while for . For , .
In region , the reduced problem has one equilibrium at . The vector points to the negative direction of the x-axis on the slow manifold. - When , for instance, , then on the circle, we have the following:
- When , ;
- When , . Then, for , while for ;
- When , . For this case, when , , there is a that . Then, for , while for . When , , we have .
In region , the reduced problem has no equilibrium, and the vector of the slow manifold points to the negative direction of the x-axis; see Figure 5c.
3.2. The Filippov Avian-Only Model
- When , no control strategy is taken;
- When , infected birds are culled at a rate of ;
- When , infected birds are culled at a rate of and, meanwhile, susceptible birds are culled at a rate of ,
3.2.1. Equilibria and Bifurcation
- When and , system (29) has a stable focus;
- When and , this focus turns into a boundary equilibrium;
- When and , the boundary equilibrium turns into a pseudonode.
3.2.2. Regularization
- Case I.For the nonsimple discontinuity , it is firstly transformed into a simple discontinuity by the map (19). Then, the dynamics are given byFor , , the dynamics are given byFor , , the dynamics isFor , , the dynamics areNow, we apply the regularization method to the other boundaries.
- Case II.For the Filippov systemwith the boundary , the regularized vector field isAround region , the differential system is given byNow, is represented by . The slow manifold is given by , i.e., . Since , , there is no slow manifold.
- Case III.For the Filippov systemwith the boundary , the regularized system isAround region , the differential system is given byApplying the transformation (34), we obtainFor , the slow manifold is , i.e., . The slow manifold is a curve that connects and .
- Case IV.For the Filippov systemwith the boundary , its regularized system isAround region , the differential system is given byFor , the slow manifold is given by , i.e., . Taking account of the condition (31) and , it gives . There is no slow manifold.
- When and , the stable focus in region preserves after regularization;
- When and , after regularization, the boundary equilibrium of is preserved but located at , where ;
- When and , the regularized system has a stable node in region .
3.2.3. Simulation Results
- Case I.Compared with the analysis in Section 3.1.2, the dynamics of can be discussed in three different regions.For ,For ,For ,
- Case II.In region , the slow manifold is an empty set for this case.
- Case III.In region , the slow manifold is , where . It is a curve connecting the points and .Notice that the point is not normally hyperbolic sinceTherefore, it needs additional blow-up. First of all, we translate this point to the origin with . Next, the blowing up , with and is performed to this point. With new coordinates, it giveswhere . One verifies that and . Thus, . This means that the angle component is decreasing for .
- Case IV.In region , the slow manifold is an empty set.
- For the case , considering since under the chosen parameter values, from the analysis of case I, on the circle, the following holds:
- When , ;
- When , . For this case, there exists a such that . Therefore, for , while for ;
- When , . Thus, for and , while for , where has the same definition as the previous case.
In region , the reduced flow goes in the positive direction of the x-axis; see Figure 7a. - When , on the circle, the following holds:
- When , ;
- When , . Then for , while for , where ;
- When , . Thus, for and , while for .
In region , the reduced problem has an equilibrium at . The flow goes in the positive direction of the x-axis; see Figure 7b. - When , for instance, , then on the circle, the following holds:
- When , ;
- When , . Then, for , while for ;
- When , . Thus, for and , while for .
In region , the reduced problem has an equilibrium at , and , and the flow goes in the positive direction of the x-axis if and goes in the negative direction of the x-axis if ; see Figure 7c.
4. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bernardo, M.D.; Budd, C.J.; Champneys, A.R.; Kowalczyk, P. Piecewise-Smooth Dynamical Systems: Theory and Applications, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Bernardo, M.D.; Pagano, D.J.; Ponce, E. Non-hyperbolic Boundary Equilibrium Bifurcations in Planar Filippov Systems: A Case Study Approach. Int. J. Bifurc. Chaos 2008, 18, 1377–1392. [Google Scholar] [CrossRef]
- Biák, M.; Hanus, T.; Janovská, D. Some applications of Filippov’s dynamical systems. J. Comput. Appl. Math. 2013, 254, 132–143. [Google Scholar] [CrossRef]
- Goh, B.S. Stability in Models of Mutualism. Am. Nat. 1979, 113, 261–275. [Google Scholar] [CrossRef]
- Liu, L.R.; Xiang, C.C.; Tang, G.Y. Dynamics Analysis of Periodically Forced Filippov Holling II Prey-Predator Model With Integrated Pest Control. IEEE Access 2019, 7, 113889–113900. [Google Scholar] [CrossRef]
- Qin, W.J.; Tan, X.W.; Shi, X.T.; Chen, J.H.; Liu, X.Z. Dynamics and Bifurcation Analysis of a Filippov Predator-Prey Ecosystem in a Seasonally Fluctuating Environment. Int. J. Bifurc. Chaos 2019, 29, 1–16. [Google Scholar] [CrossRef]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides, 1st ed.; Springer: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Agrawal, J.; Moudgalya, K.M.; Pani, A.K. Sliding motion of discontinuous dynamical systems described by semi-implicit index one differential algebraic equations. Chem. Eng. Sci. 2006, 61, 4722–4731. [Google Scholar] [CrossRef]
- Chen, F.D. Permanence of periodic Holling type Predator-Prey system with stage structure for prey. Appl. Math. Comput. 2006, 182, 1849–1860. [Google Scholar] [CrossRef]
- Chen, L.J.; Chen, F.D.; Chen, L.J. Qualitative analysis of a predator-prey model with Holling type II functional response incorporating a constant prey refuge. Nonlinear Anal. Real World Appl. 2010, 11, 246–252. [Google Scholar] [CrossRef]
- Buzzi, C.A.; Silva, P.R.; Teixeira, M.A. Slow-fast systems on algebraic varieties bordering piecewise-smooth dynamical systems. Bull. Sci. 2012, 136, 444–462. [Google Scholar] [CrossRef]
- Chong, N.; Smith, R. Modeling avian influenza using Filippov systems to determine culling of infected birds and quarantine. Nonlinear Anal. Real World Appl. 2015, 24, 196–218. [Google Scholar] [CrossRef]
- Huang, L.H.; Ma, H.L.; Wang, J.F.; Huang, C.X. Global dynamics of a Filippov plant disease model with an economic threshold of infected-susceptible ratio. J. Appl. Anal. Comput. 2020, 10, 2263–2277. [Google Scholar] [CrossRef]
- Teixeira, M.A.; Silva, P.R. Regularization and singular perturbation techniques for non-smooth systems. Phys. Nonlinear Phenom. 2012, 241, 1948–1955. [Google Scholar] [CrossRef]
- Chen, C.; Chen, X. Rich Sliding Motion and Dynamics in a Filippov Plant-Disease System. Int. J. Bifurc. Chaos 2018, 28, 1850012. [Google Scholar] [CrossRef]
- Yang, Y.P.; Wang, L.J. Global Dynamics and Rich Sliding Motion in an Avian-Only Filippov System in Combating Avian Influenza. Int. Bifurc. Chaos 2020, 30, 2050008. [Google Scholar] [CrossRef]
- Cao, N.B.; Zhang, Y.; Liu, X. Dynamics and Bifurcations in Filippov Type of Competitive and Symbiosis Systems. Int. J. Bifurc. Chaos 2022, 32, 1–21. [Google Scholar] [CrossRef]
- Dercole, F.; Rossa, F.D.; Colombo, A.; Kuznetsov, Y.A. Two Degenerate Boundary Equilibrium Bifurcations in Planar Filippov Systems. SIAM J. Appl. Dyn. Syst. 2011, 10, 1525–1553. [Google Scholar] [CrossRef]
- Efstathiou, K.; Liu, X.; Broer, H.W. The Boundary-Hopf-Fold Bifurcation in Filippov Systems. SIAM J. Appl. Dyn. Syst. 2015, 14, 914–941. [Google Scholar] [CrossRef]
- Kuznetsov, Y.A.; Rinaldi, S.; Gragnani, A. One-Parameter Bifurcations in Planar Filippov Systems. Int. J. Bifurc. Chaos 2003, 13, 1–50. [Google Scholar] [CrossRef]
- Jelbart, S.; Kristiansen, K.U.; Wechselberger, M. Singularly Perturbed Boundary-Equilibrium Bifurcations. Nonlinearity 2021, 34, 7371–7414. [Google Scholar] [CrossRef]
- Jelbart, S.; Kristiansen, K.U.; Wechselberger, M. Singularly Perturbed Boundary-Focus Bifurcations. J. Differ. Equ. 2021, 296, 412–492. [Google Scholar] [CrossRef]
- Kaklamanos, P.; Kristiansen, K.U. Regularization and Geometry of Piece-wise Smooth Systems with Intersecting Discontinuity Sets. SIAM J. Appl. Dyn. Syst. 2019, 18, 1225–1264. [Google Scholar] [CrossRef]
- Leine, R.I.; Nijmeijer, H. Dynamics and Bifurcations of Non-Smooth Mechanical Systems, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Lin, Q.F. Dynamic behaviors of a commensal symbiosis model with non-monotonic functional response and non-selective harvesting in a partial closure. Commun. Math. Biol. Neurosci. 2018, 2018, 1–15. [Google Scholar]
- Liu, X. The Discontinuous Hopf-Transversal System and Its Geometric Regularization. Ph.D. Thesis, University of Groningen, Groningen, The Netherlands, 2013. [Google Scholar]
- Sotomayor, J.; Teixeira, M.A. Regularization of Discontinuous Vector Fields. In Proceedings of the International Conference on Differential Equations, Lisboa, Portugal, 18–23 August 1996. [Google Scholar]
- Buzzi, C.A.; Silva, P.R.; Teixeira, M.A. A singular approach to discontinuous vector fields on the plane. J. Differ. Equ. 2006, 231, 633–655. [Google Scholar] [CrossRef]
- Guardia, M.; Seara, T.M.; Teixeira, M.A. Generic bifurcations of low codimension of planar Filippov systems. J. Differ. Equ. 2011, 250, 1967–2023. [Google Scholar] [CrossRef]
- Jacquemard, A.; Teixeira, M.A. On singularities of discontinuous vector fields. Bull. Des. Sci. Math. 2003, 127, 611–633. [Google Scholar] [CrossRef]
- Llibre, J.; Silva, P.R.; Teixeira, M.A. Regularization of Discontinuous Vector Fields on R3 via Singular Perturbation. J. Dyn. Differ. Equ. 2007, 19, 309–331. [Google Scholar] [CrossRef]
- Llibre, J.; Silva, P.R.; Teixeira, M.A. Sliding Vector Fields via Slow-Fast Systems. Bull. Belg. Math.-Soc.-Simon Stevin 2008, 15, 851–869. [Google Scholar] [CrossRef]
- Llibre, J.; Silva, P.R.; Teixeira, M.A. Synchronization and Non-Smooth Dynamical Systems. J. Dyn. Differ. Equ. 2012, 24, 1–12. [Google Scholar] [CrossRef]
- Reves, C.B.; Larrosa, J.; Seara, T.M. Regularization around a generic codimension one fold-fold singularity. J. Differ. Equ. 2018, 265, 1761–1838. [Google Scholar] [CrossRef]
- Reves, C.B.; Seara, T.M. Regularization of sliding global bifurcations derived from the local fold singularity of Filippov systems. Discret. Contin. Dyn. Syst. 2016, 36, 3545–3601. [Google Scholar] [CrossRef]
- Tonon, D.J.; Carvalho, T. Generic Bifurcations of Planar Filippov Systems via Geometric Singular Perturbations. Bull. Belg.-Math.-Simon Stevin 2011, 18, 861–881. [Google Scholar] [CrossRef]
- Silva, G.T.; Martins, R.M. Dynamics and stability of non-smooth dynamical systems with two switches. Nonlinear Dyn. 2022, 108, 3157–3184. [Google Scholar] [CrossRef]
- Wang, A.L.; Xiao, Y.N. A Filippov system describing media effects on the spread of infectious diseases. Nonlinear Anal. Hybrid Syst. 2014, 11, 84–97. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Xiao, Y.N. Global dynamics for a Filippov epidemic system with imperfect vaccination. Nonlinear Anal. Hybrid Syst. 2020, 38, 100932. [Google Scholar] [CrossRef]
- Simpson, D.J.W. Bifurcations in Piecewise-Smooth Continuous Systems, 1st ed.; World Scientific: Singapore, 2010. [Google Scholar]
- Cerda, R.; Avelino, J.; Gary, C.; Tixier, P.; Lechevallier, E.; Allinne, C. Primary and secondary yield losses caused by pests and diseases: Assessment and modeling in coffee. PLoS ONE 2017, 12, e0169133. [Google Scholar] [CrossRef] [PubMed]
- Savary, S.; Ficke, A.; Aubertot, J.; Hollier, C. Crop losses due to diseases and their implications for global food production losses and food security. Food Secur. 2012, 4, 519–537. [Google Scholar] [CrossRef]
- Blaise, P.; Dietrich, R.; Gessler, G. Vinemild: An application-oriented model of plasmora viticola epidemics on vitis vinifera. Acta Hortic. 1999, 499, 187–192. [Google Scholar] [CrossRef]
- Thresh, J.M.; Owusu, G.K. The control of cocoa swollen shoot disease in ghana: An evaluation of eradication procedures. Crop Prot. 1986, 5, 41–52. [Google Scholar] [CrossRef]
- Shtienberg, D.; Zilberstaine, M.; Oppenheim, D.; Levi, S.; Shwartz, H.; Kritzman, G. New Considerations for Pruning in Management of Fire Blight in Pears. Plant Dis. 2003, 87, 1083–1088. [Google Scholar] [CrossRef] [PubMed]
- Iljon, T.; Stirling, J.; Smith, R.J. A mathematical model describing an outbreak of fire blight. In Understanding the Dynamics of Emerging and Re-Emerging Infectious Diseases Using Mathematical Models; Transworld Research Network: Kerala, India, 2012; Volume 2012, pp. 91–104. [Google Scholar]
- Silva, P.R.; Llibre, J.; Teixeira, M.A. Sliding vector fields for non-smooth dynamical systems having intersecting switching manifolds. Nonlinearity 2015, 28, 493–507. [Google Scholar]
- Jung, E.; Iwami, S.; Takeuchi, Y. Optimal control strategy for prevention of avian influenza pandemic. J. Theor. Biol. 2009, 260, 220–229. [Google Scholar] [CrossRef] [PubMed]
- Mu, R.; Yang, Y. Global Dynamics of an Avian Influenza A(H7N9) Epidemic Model with Latent Period and Nonlinear Recovery Rate. Comput. Math. Meth. Med. 2018, 2018, 7321694. [Google Scholar] [CrossRef] [PubMed]
- Shingo, I.; Takeuchi, Y.; Liu, X.N. Avian-human influenza epidemic model. Math. Biosci. 2007, 207, 1–25. [Google Scholar]
- Chong, N.; Dionne, B.; Smith, R. An avian-only Filippov model incorporating culling of both susceptible and infected birds in combating avian influenza. J. Math. Biol. 2016, 73, 751–784. [Google Scholar] [CrossRef]
- Liu, S.H.; Ruan, S.G.; Zhang, X.N. Nonlinear dynamics of avian-influenza epidemic models. Math. Biosci. 2017, 283, 118–135. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, N.; Zhang, Y.; Liu, X. Regularization of the Boundary Equilibrium Bifurcation in Filippov System with Rich Discontinuity Boundaries. Axioms 2024, 13, 186. https://doi.org/10.3390/axioms13030186
Cao N, Zhang Y, Liu X. Regularization of the Boundary Equilibrium Bifurcation in Filippov System with Rich Discontinuity Boundaries. Axioms. 2024; 13(3):186. https://doi.org/10.3390/axioms13030186
Chicago/Turabian StyleCao, Nanbin, Yue Zhang, and Xia Liu. 2024. "Regularization of the Boundary Equilibrium Bifurcation in Filippov System with Rich Discontinuity Boundaries" Axioms 13, no. 3: 186. https://doi.org/10.3390/axioms13030186
APA StyleCao, N., Zhang, Y., & Liu, X. (2024). Regularization of the Boundary Equilibrium Bifurcation in Filippov System with Rich Discontinuity Boundaries. Axioms, 13(3), 186. https://doi.org/10.3390/axioms13030186