
Dynamic Performance Improvement of Solenoid Screw-In Cartridge Valve Using a New Hybrid Voltage Control


Abstract
:1. Introduction
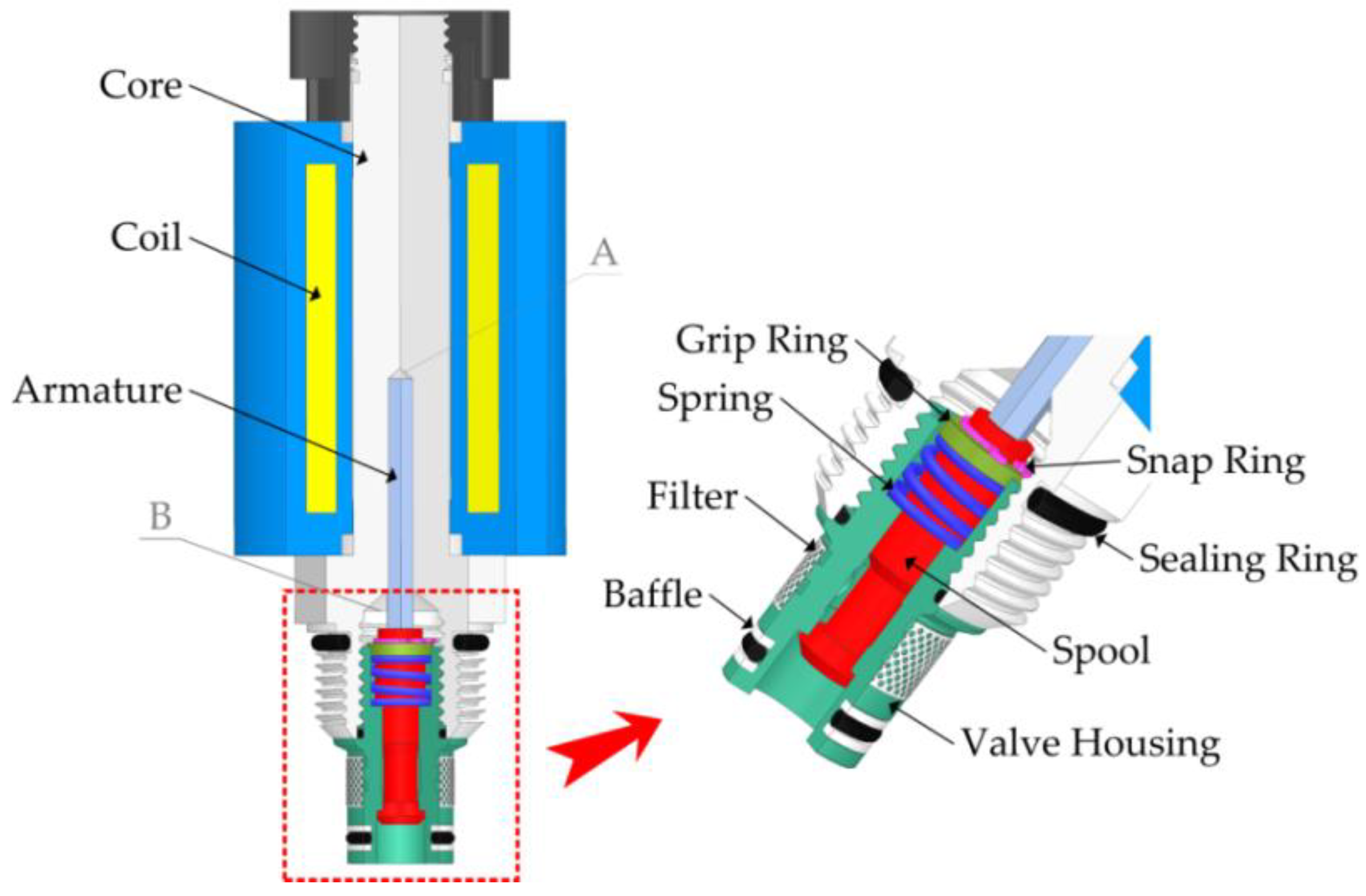
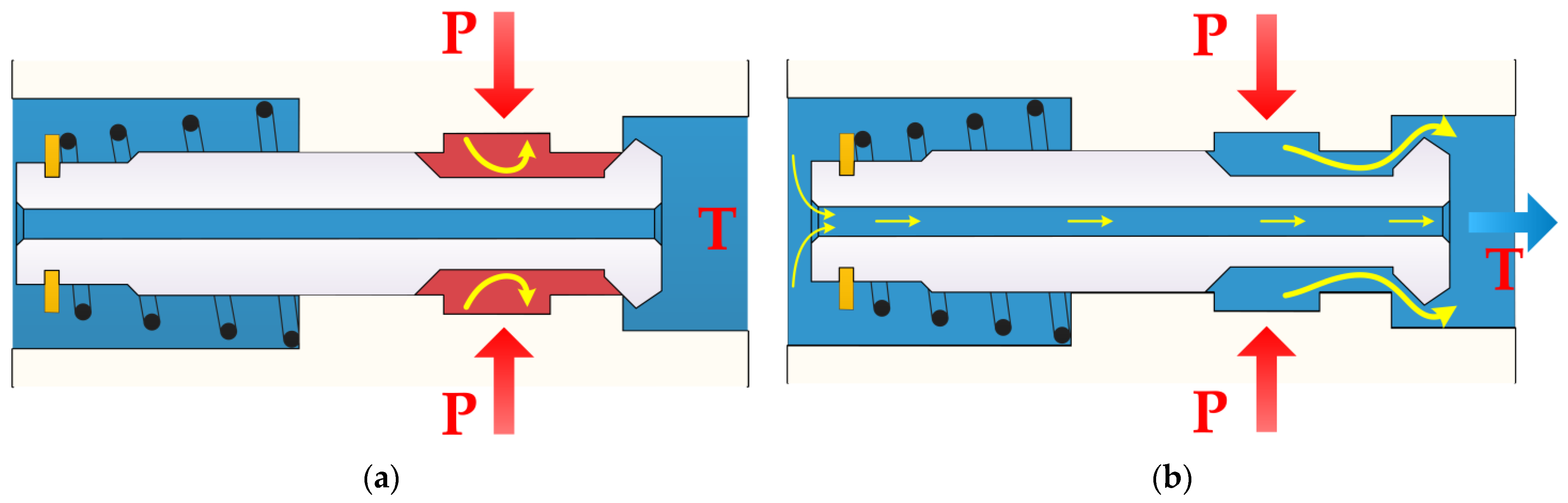
2. Structure and Working Principle of Solenoid Screw-In Cartridge Valve (SCV)
3. Theoretical Analysis
3.1. Mechanical Characteristics
3.2. Mechanical Characteristics
- The magnetic resistance of the coil is ignored in order to simplify the model of solenoid coil.
- The electromagnet is the invariably unsaturated state during the spool movement.
- Magnetic flux is uniformly distributed in the air gap when the coil is excited.
3.3. Electric Circuit Characteristics
3.4. Hydrodynamic Characteristics
3.5. Dynamic Characteristic of SCV
3.6. Critical Motion Analysis of Spool
4. Control Strategy and Simulation Model
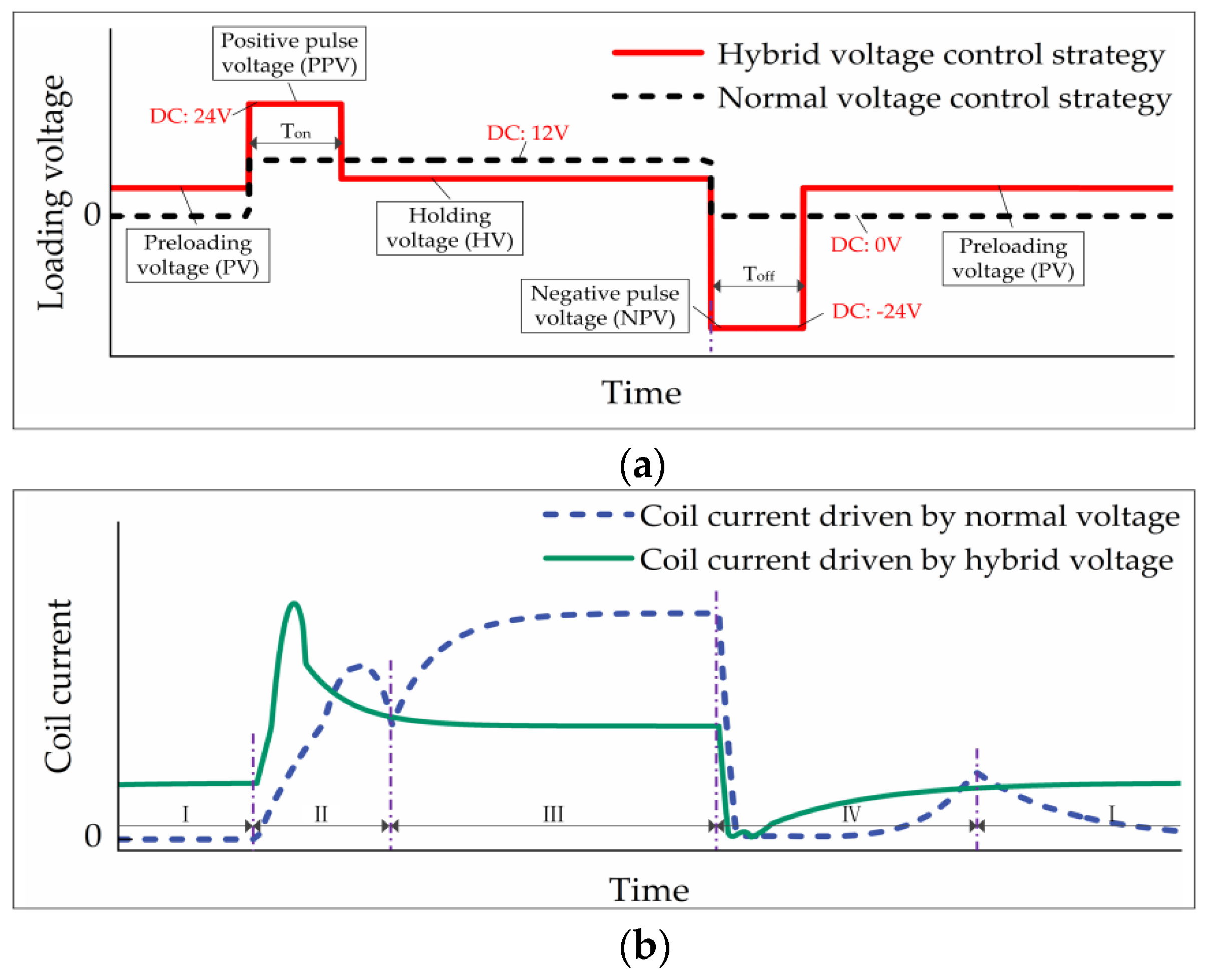
4.1. Hybrid Voltage Control
- The PV reduces the time from the initial current to the critical current by increasing the initial current of the coil, to shorten the spool opening delay time Tod.
- The PPV accelerates the change rate of coil current, resulting in less spool movement time Tom.
- The reduction of the HV, based on the concept of keeping the spool open, helps to decrease the coil initial current of the spool closing stage, which results in some decrease in the closing delay time Tcd.
- The NPV enhances the decreasing rate of coil current and minimizes the blocking effect of coil eddy current on the spool closing stage for the sake of cutting the spool closing moving time Tcm.
4.2. Modeling and Experiment Verification
5. Simulation Results
5.1. Loading Voltage and Duty Cycle
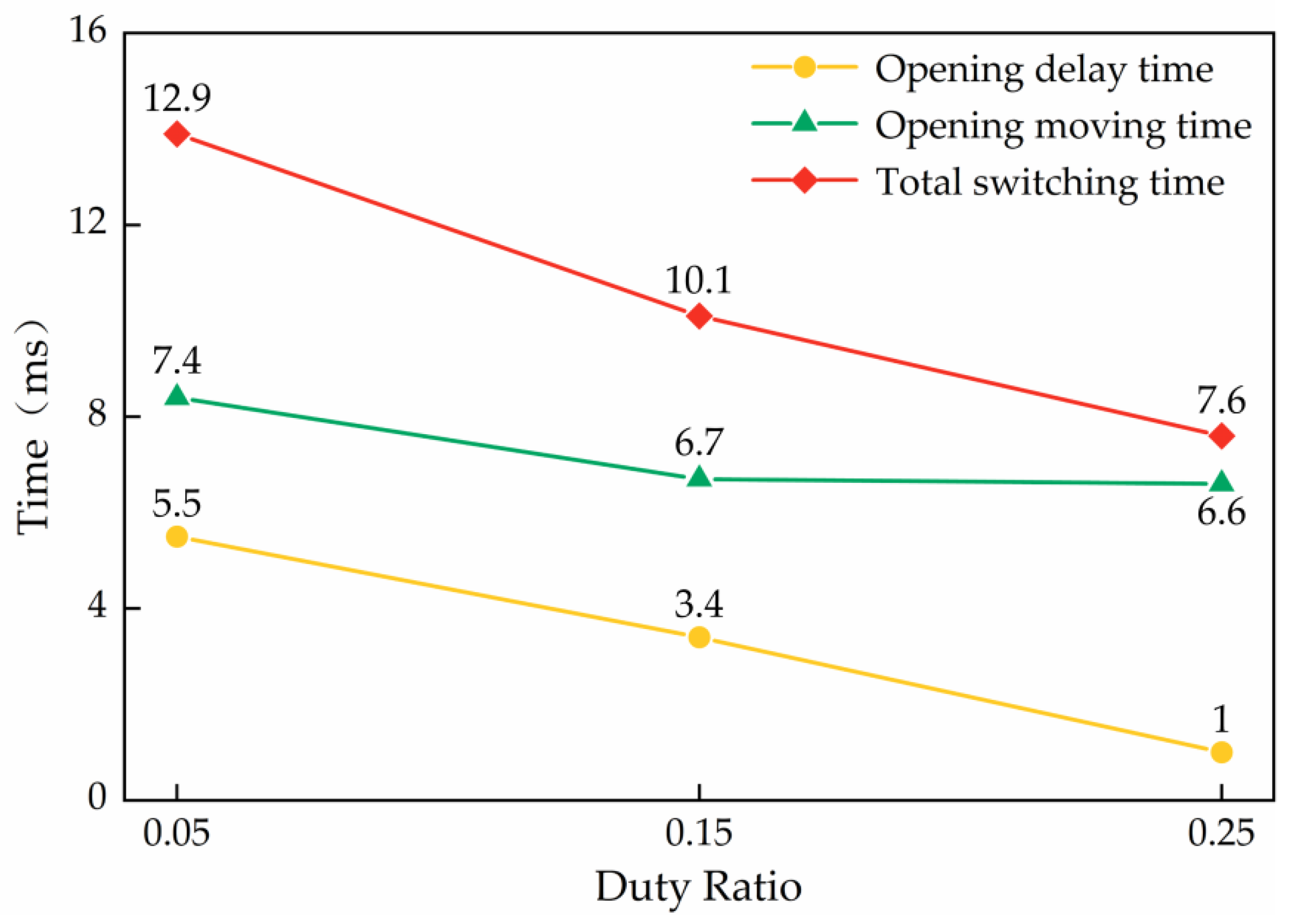
5.2. Effects of the Duty Ratio of Preloading Voltage (PV) on Dynamic Characteristics of the SCV
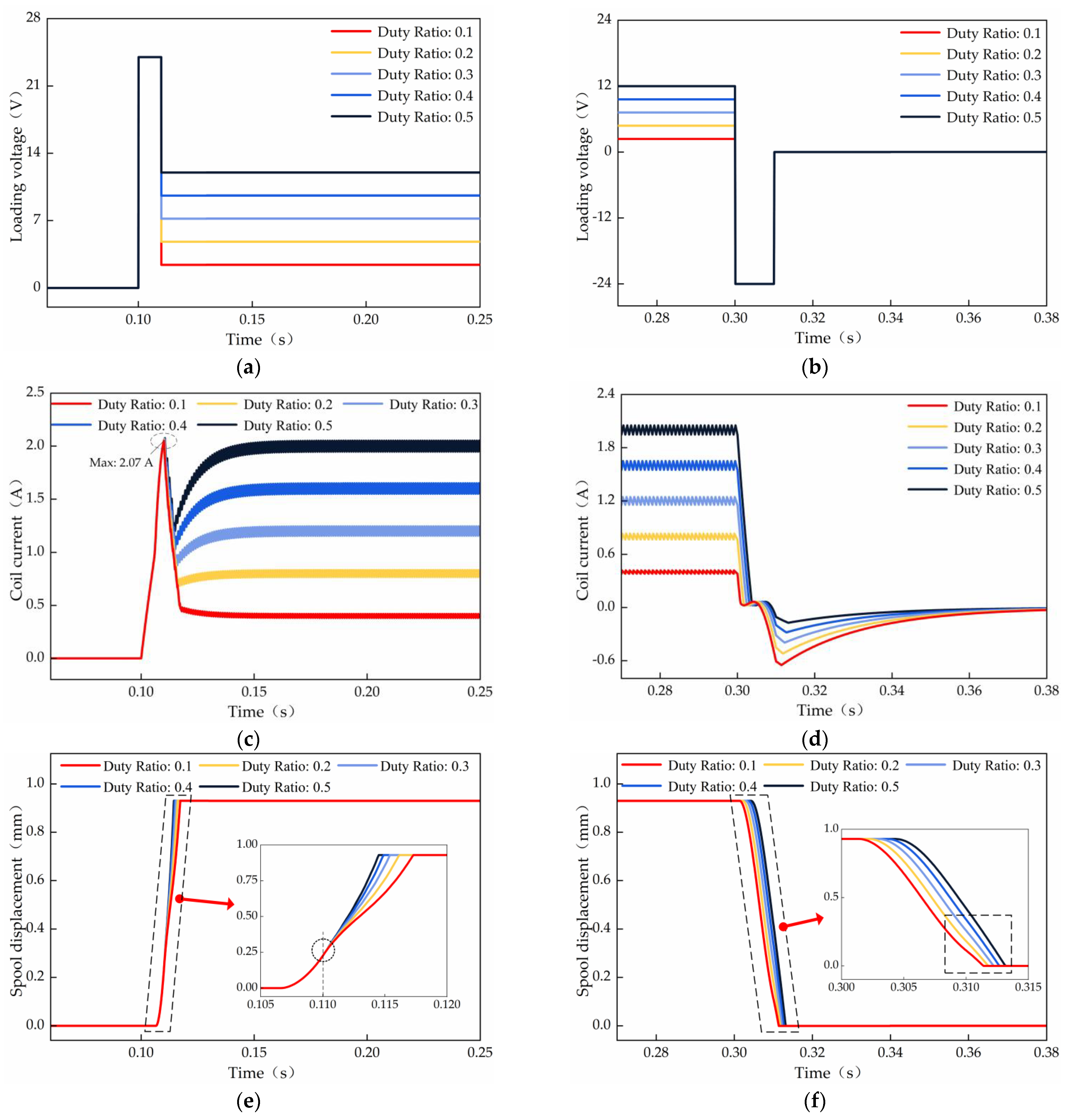
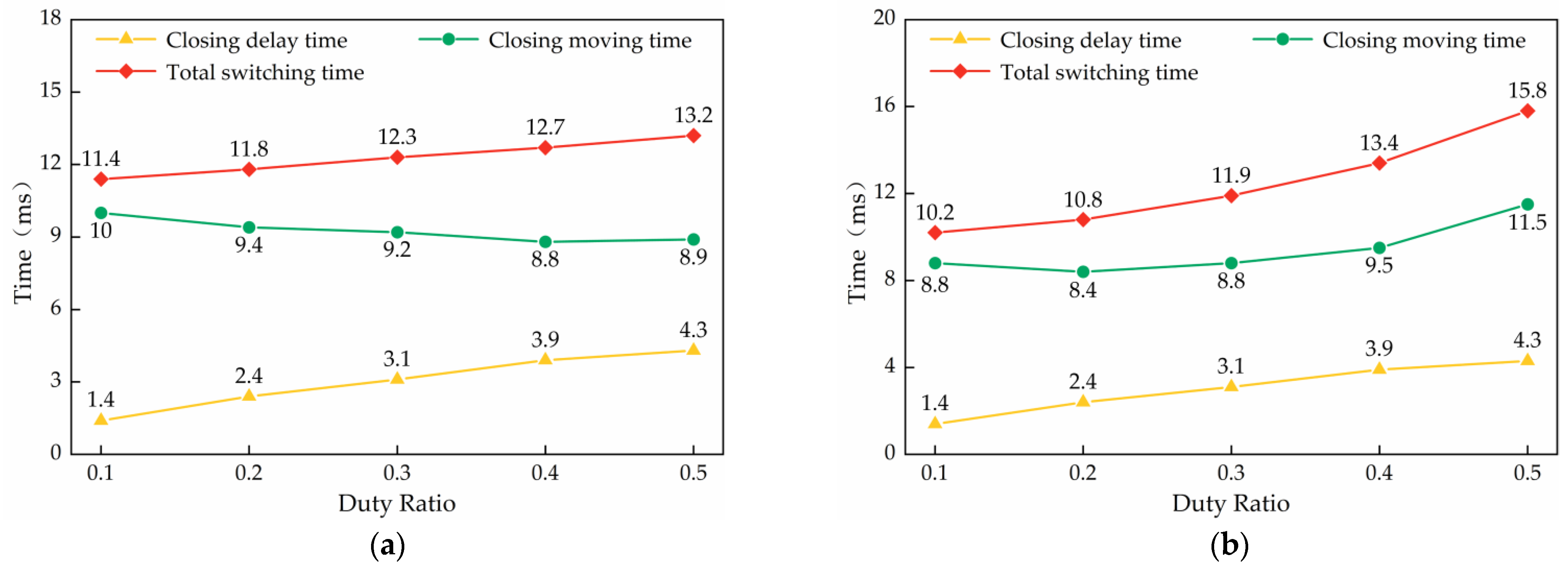
5.3. Effects of the Duty Ratio of Holding Voltage (HV) on Dynamic Characteristics of the SCV
5.4. Comparison of Three Control Methods
6. Conclusions
- An excessive preloading voltage will cause the spool to open by mistake. While keeping the SCV shut, the bigger preloading voltage is beneficial to the decrease of the opening delay time.
- Under the spool opening conditions, reducing the holding voltage can effectively improve the closing delay characteristic of the SCV.
- With the addition of the preloading and holding voltages, some adjustment of the positive and negative pulse voltage duration may be necessary to avoid the coil always working in 24 V after the spool opening, or the spool opening once again after closing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hua-Yong, Y.; Min, P. Engineering research in fluid power: A review. J. Zhejiang Univ. Sci. A 2015, 16, 427–442. [Google Scholar] [CrossRef] [Green Version]
- Laamanen, M.S.A.; Vilenius, M. Is it time for digital hydraulics. In Proceedings of the Eighth Scandinavian International Conference on Fluid Power, Tampere, Finland, 7–9 May 2003. [Google Scholar]
- Taghizadeh, M.; Ghaffari, A.; Najafi, F. Modeling and identification of a solenoid valve for PWM control applications. Comptes Rendus Mec. 2009, 337, 131–140. [Google Scholar] [CrossRef]
- Aihong, M.; Xiang, G.; Nannan, L.; Charles, G. Study on the Effect of Structural Parameters on the Linear Control Performance of High Speed On-Off Valve Based on Flow Field Analysis. SAE Tech. Pap. Ser. 2020, 01, 1644–1651. [Google Scholar]
- Passarini, L.C.; Nakajima, P.R. Development of a high-speed solenoid valve: An investigation of the importance of the armature mass on the dynamic response. J. Braz. Soc. Mech. Sci. Eng. 2003, 25, 329–335. [Google Scholar] [CrossRef]
- Sturman, O.E. Sturman Digital Systems LLC. Digital Fuel Injector, Injection and Hydraulic Valve Actuation Module and Engine and High Pressure Pump Methods and Apparatus. U.S. Patent 7,568,633, 4 August 2009. [Google Scholar]
- Uusitalo, J.-P.; Ahola, V.; Soederlund, L.; Linjama, M.; Juhola, M.; Kettunen, L. Novel bistable hammer valve for digital hydraulics. Int. J. Fluid Power 2010, 11, 35–44. [Google Scholar] [CrossRef]
- Shuai, W.; Xiangyu, Z.; Chunfang, L.; Zongxia, J.; Fengyu, Q. Multiobjective Optimization of a Hollow Plunger Type Solenoid for High Speed On/Off Valve. IEEE Trans. Ind. Electron. 2018, 65, 3115–3124. [Google Scholar]
- Haibing, J.; Jian, R.; Sheng, L.; Xiqing, Z.; Ying, C. Design and Experiment of 2D Electrohydraulic High-speed On-off Valve. Trans. Chin. Soc. Agric. Mach. 2015, 46, 328–334. [Google Scholar]
- Tu, H.C.; Rannow, M.B.; Wang, M.; Li, P.Y.; Chase, T.R.; Van De Ven, J.D. Design, modeling, and validation of a high-speed rotary pulse-width-modulation on/off hydraulic valve. J. Dyn. Syst. Meas. Control. 2012, 134, 061002. [Google Scholar] [CrossRef] [Green Version]
- Guowen, L.; Jian, R.; Shen, L.; Bin, M. Design and experimental study of two-dimensional (2D) electro-hydraulic proportional directional valve. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 5–7 August 2015; pp. 276–282. [Google Scholar]
- Xiaowu, K.; Shizhen, L. Dynamic performance of high speed solenoid valve with parallel coils. Chin. J. Mech. Eng. 2014, 27, 816–821. [Google Scholar]
- Qilei, W.; Fengyu, Y.; Qian, Y.; Junhui, C.; Hongyan, G. Experimental analysis of new high-speed powerful digital solenoid valves. Energy Convers. Manag. 2011, 52, 2309–2313. [Google Scholar]
- Meng, A. Design of pulsed jet on-off valve based on giant magnetostrictive actuator. In Proceedings of the International Conference on Integration and Commercialization of Micro and Nanosystems, Sanya, China, 10–13 January 2007; pp. 397–401. [Google Scholar]
- Juntao, Y.; Zongxia, J.; Shuai, W. Design. Simulation and Test of High-flow High-speed on/off Valve Driven by Piezoelectric. J. Mech. Eng. 2020, 56, 226–234. [Google Scholar] [CrossRef]
- Xiaoming, C.; Yuchuan, Z.; Zhang, L.; Renqiang, L.; Minghao, T.; Changwen, W. Characteristic investigation of a magnetostrictive fast switching valve for digital hydraulic converter. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2021, 235, 190–206. [Google Scholar]
- Liyi, L.; Chengming, Z.; Baiping, Y.; Xiaopeng, L. Research of a giant magnetostrictive valve with internal cooling structure. IEEE Trans. Magn. 2011, 47, 2897–2900. [Google Scholar] [CrossRef]
- Can, Z.; Ji-An, D.; Guiling, D.; Junhui, L. A novel high-speed jet dispenser driven by double piezoelectric stacks. IEEE Trans. Ind. Electron. 2016, 64, 412–419. [Google Scholar]
- Pellikka, M.; Ahola, V.; Soederlund, L.; Uusitalo, J.-P. Genetic optimization of a fast solenoid actuator for a digital hydraulic valve. Int. J. Fluid Power 2011, 12, 49–56. [Google Scholar] [CrossRef]
- Sato, Y.; Sato, S.; Tanaka, H. High Speed Switching of a High Response On/Off Solenoid Valve. Proc. JSME Mech. Control. Conf. B 1993, 930–942, 560–965. [Google Scholar]
- Ill-Yeong, L. Switching response improvement of a high speed on/off solenoid valve by using a 3 power source type valve driving circuit. In Proceedings of the 2006 IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1823–1828. [Google Scholar]
- Ming, S. Investigation on Control Characteristics and Method of Solenoid High Speed On/Off Valve. Ph.D. Thesis, Guizhou University, Guiyang, China, 2010. [Google Scholar]
- Jianhui, Z.; Meiling, W.; Zhangjun, W.; Grekhov, L.; Tao, Q.; Xiuzhen, M. Different boost voltage effects on the dynamic response and energy losses of high-speed solenoid valves. Appl. Therm. Eng. 2017, 123, 1494–1503. [Google Scholar]
- Jianhui, Z.; Pengfei, Y.; Grekhov, L.; Xiuzhen, M. Hold current effects on the power losses of high-speed solenoid valve for common-rail injector. Appl. Therm. Eng. 2018, 128, 1579–1587. [Google Scholar]
- Qiang, G.; Yuchuan, Z.; Zhang, L.; Bruno, N. Investigation on adaptive pulse width modulation control for high speed on/off valve. J. Mech. Sci. Technol. 2020, 34, 1711–1722. [Google Scholar]
- Qiang, G.; Yuchuan, Z.; Zhang, L.; Xiaoming, C. Analysis and optimization on compound PWM control strategy of high-speed on /off valve. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 1129–1136. [Google Scholar]
- Bin, Z.; Qi, Z.; Ji-En, M.; Hao-Cen, H.; Hui-Ming, B.; Yan, S.; Hua-Yong, Y. Self-correcting PWM control for dynamic performance preservation in high speed on/off valve. Mechatronics 2018, 55, 141–150. [Google Scholar]
- Daling, Y.; Linfei, L.; Liejiang, W.; Zengguang, L.; Chao, L.; Xiukun, Z. Effects of Pulse Voltage Duration on Open–Close Dynamic Characteristics of Solenoid Screw-In Cartridge Valves. Processes 2021, 9, 1722. [Google Scholar]
- Merritt, H. Hydraulic Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 1991; pp. 90–92. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment Name | Parameter | Value |
|---|---|---|
| Inverter motor | Operating speed (r/min) | 1000 |
| Pump | Rated displacement (mL/r) | 20 |
| Relief valve | Experimental pressure (MPa) | 5 |
| High frequency pressure sensor | Measuring range (MPa) | 0–16 |
| Output signal (V) | 0–5 | |
| Solenoid screw-in cartridge valves | Rated drive voltage (V) | DC 12 |
| Rated pressure (MPa) | 25 | |
| Rated flow (L/min) | 12 |
| Strategy 1 | Strategy 2 | Strategy 3 | ||||||
|---|---|---|---|---|---|---|---|---|
| Normal Voltage | Pulse Voltage | Hybrid Voltage | ||||||
| Value | Value | Percentage (2 vs. 1) | Value | Percentage (3 vs. 1) | Percentage (3 vs. 2) | |||
| Open | Tod | (ms) | 15.5 | 6.7 | ↑ 56.77% | 1.0 | ↑ 93.55% | ↑ 85.07% |
| Tom | (ms) | 14.0 | 7.8 | ↑ 44.29% | 6.6 | ↑ 52.86% | ↑ 15.38% | |
| Tot | (ms) | 29.5 | 14.5 | ↑ 50.85% | 7.6 | ↑ 74.24% | ↑ 47.59% | |
| Close | Tcd | (ms) | 104.0 | 4.3 | ↑ 95.86% | 1.9 | ↑ 98.17% | ↑ 55.81% |
| Tcm | (ms) | 32.0 | 9.0 | ↑ 71.88% | 8.9 | ↑ 72.19% | ↑ 01.11% | |
| Tct | (ms) | 136.0 | 13.3 | ↑ 90.22% | 10.8 | ↑ 92.06% | ↑ 18.80% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Li, L.; Yue, D.; Wei, L.; Liu, C.; Zuo, X. Dynamic Performance Improvement of Solenoid Screw-In Cartridge Valve Using a New Hybrid Voltage Control. Machines 2022, 10, 106. https://doi.org/10.3390/machines10020106
Liu Z, Li L, Yue D, Wei L, Liu C, Zuo X. Dynamic Performance Improvement of Solenoid Screw-In Cartridge Valve Using a New Hybrid Voltage Control. Machines. 2022; 10(2):106. https://doi.org/10.3390/machines10020106
Chicago/Turabian StyleLiu, Zengguang, Linfei Li, Daling Yue, Liejiang Wei, Chao Liu, and Xiukun Zuo. 2022. "Dynamic Performance Improvement of Solenoid Screw-In Cartridge Valve Using a New Hybrid Voltage Control" Machines 10, no. 2: 106. https://doi.org/10.3390/machines10020106
APA StyleLiu, Z., Li, L., Yue, D., Wei, L., Liu, C., & Zuo, X. (2022). Dynamic Performance Improvement of Solenoid Screw-In Cartridge Valve Using a New Hybrid Voltage Control. Machines, 10(2), 106. https://doi.org/10.3390/machines10020106