
Predictive Control of Multi-Phase Motor for Constant Torque Applications



Abstract
:1. Introduction
2. Case Study
2.1. Five-Phase Induction Motor Model
2.2. Constant Torque Applications
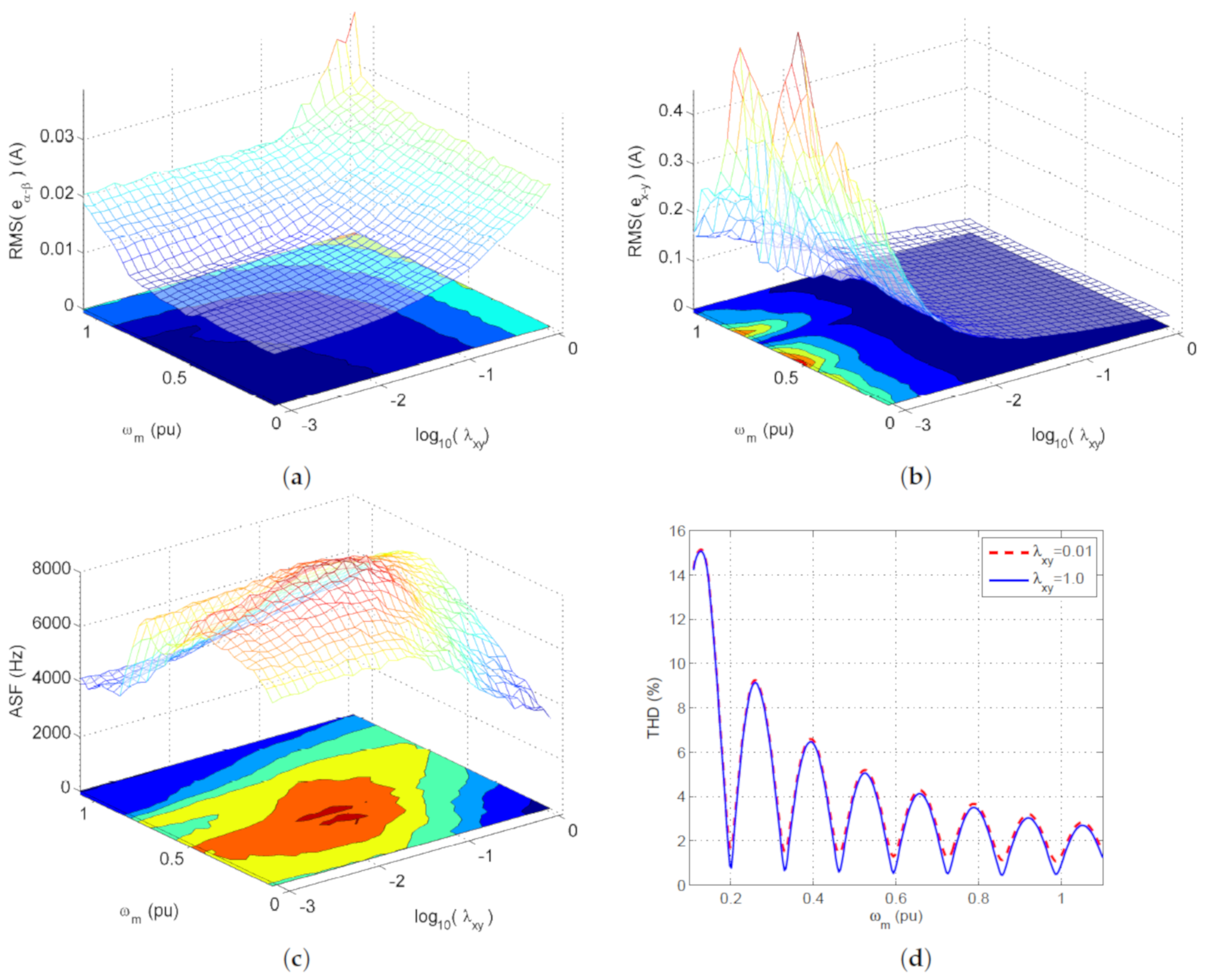
3. Figures of Merit and Preliminary Analysis
- Both and have a mostly monotonic variation with and . However, if is chosen to achieve a low , then the corresponding is larger. This effect, however, is more marked at some speeds than others.
- The ASF map shows a bump around mid-range, with lesser values found for extreme values of . This constitutes a major complication for standard tuning procedures. Nevertheless, the maximum ASF for all tunings and speeds is acceptable for most applications except, perhaps, very high-power applications.
- The THD depends mostly on speed and very little on , and this is the reason for using an edge-on presentation in the last plot.
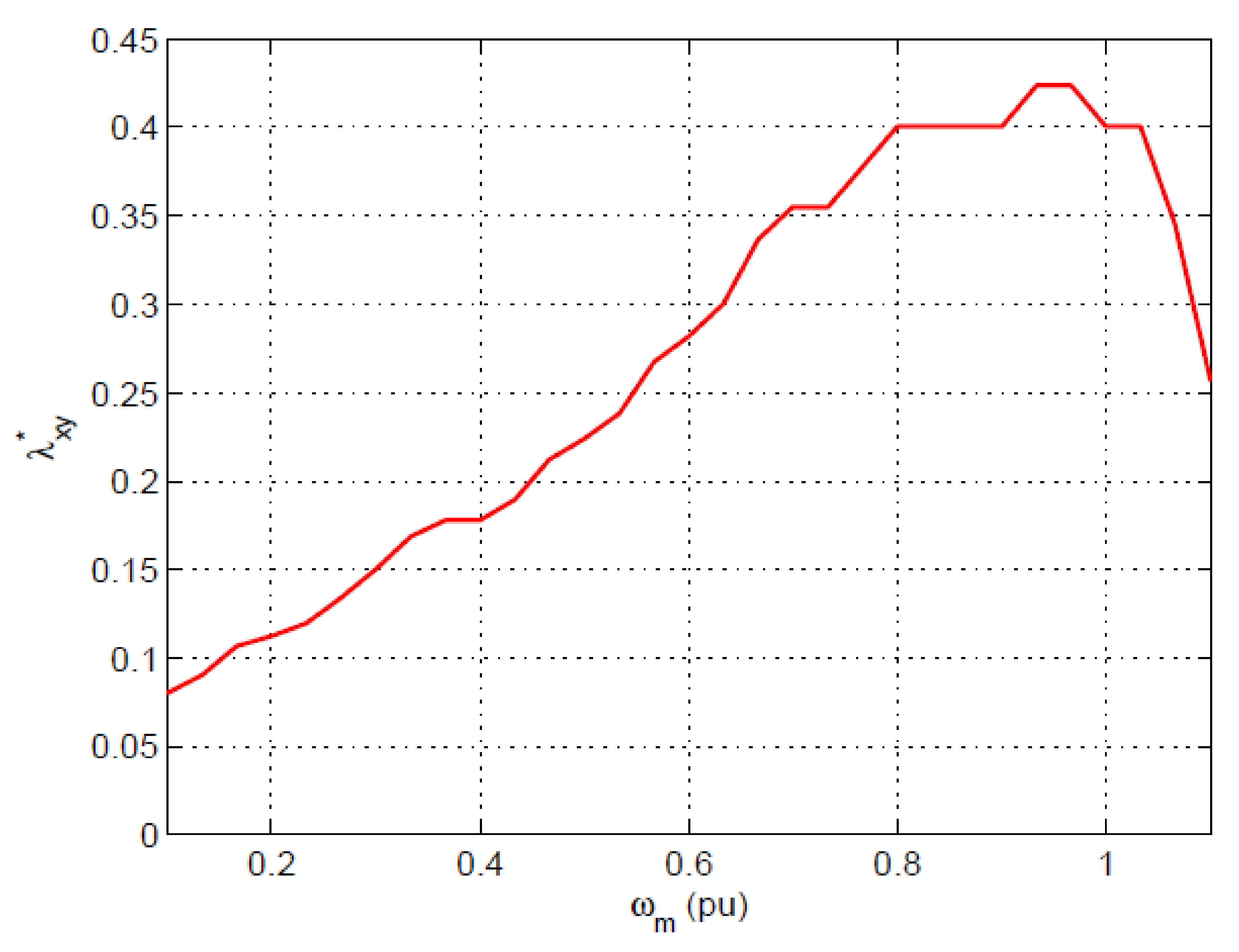
4. Proposed Tuning and Assessment
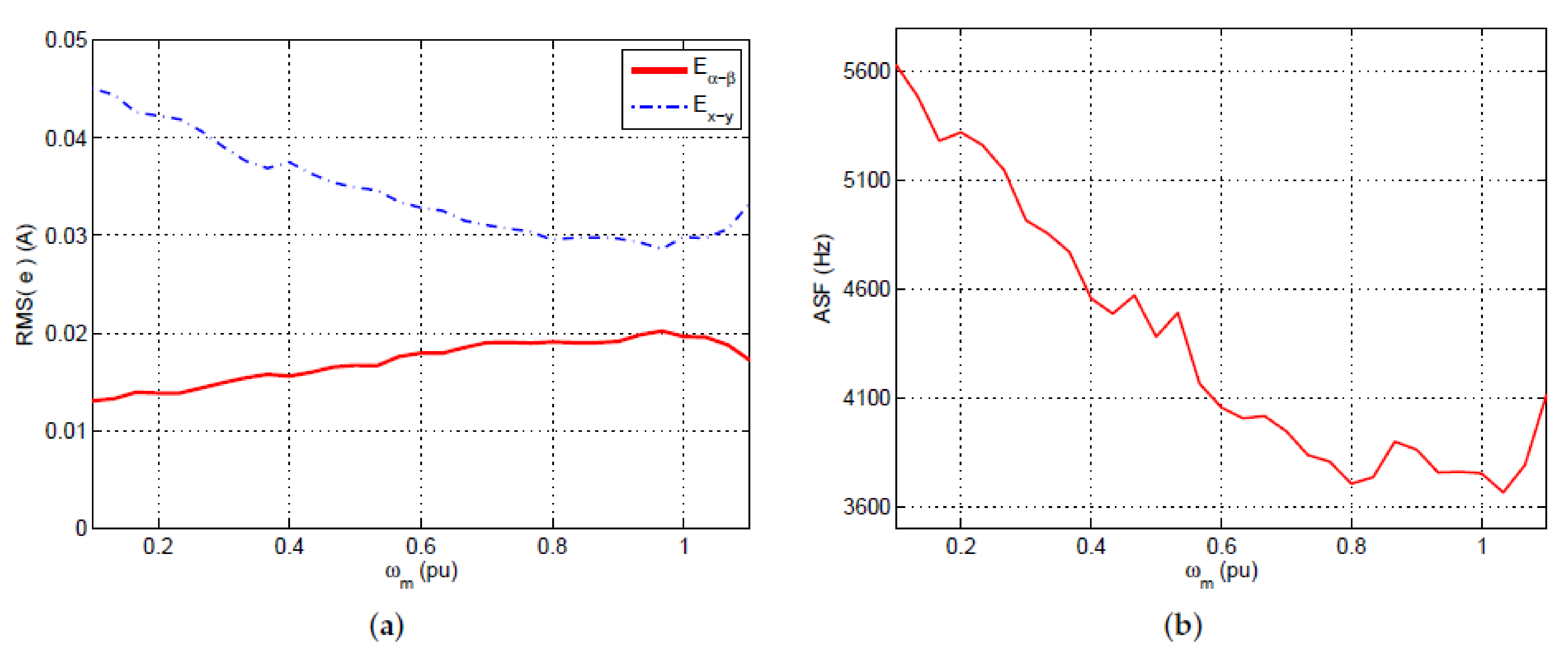
4.1. Simulation Results
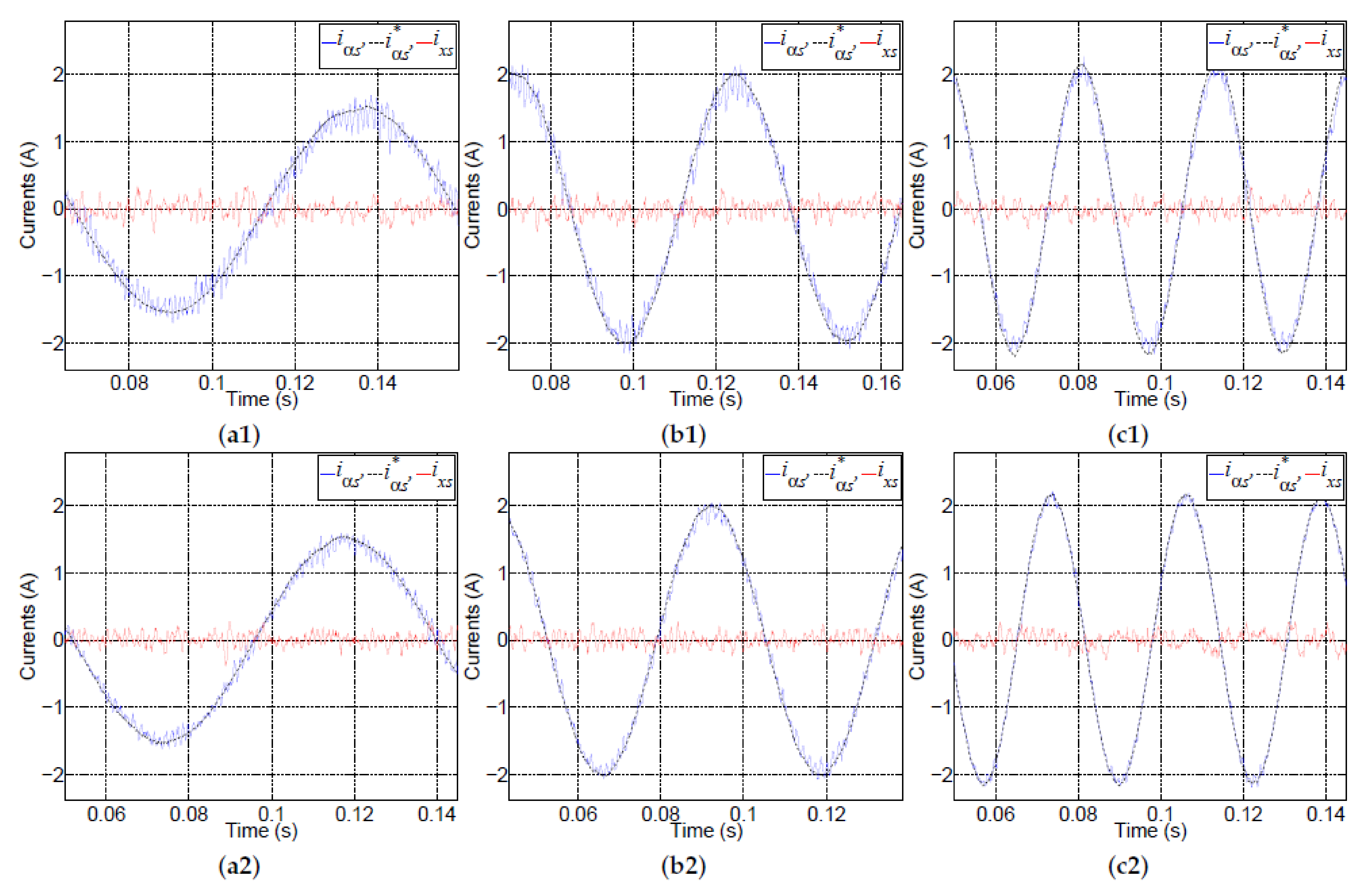
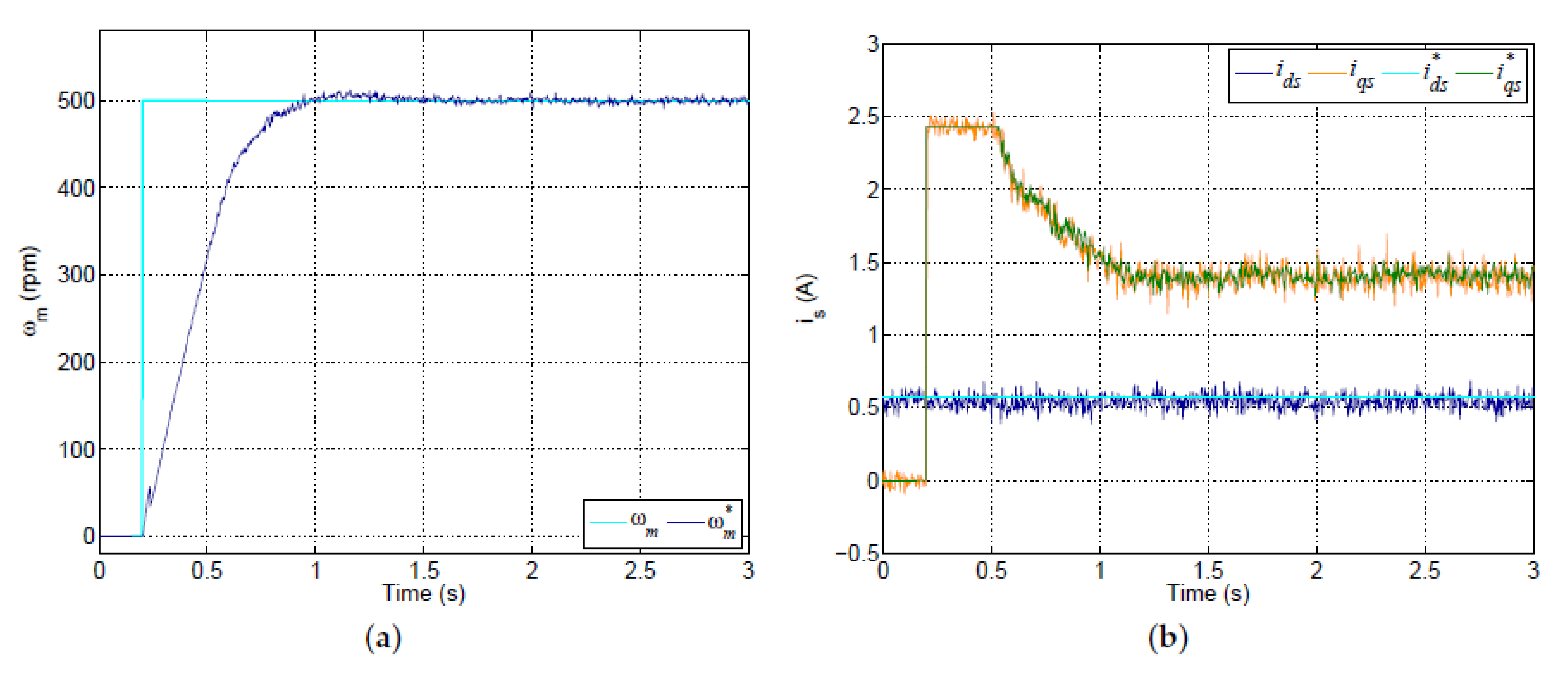
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jensen, J.K.; Kærn, M.R.; Pedersen, P.H.; Markussen, W.B. Comparison of compressor control strategies for energy efficient refrigerated counters. Int. J. Refrig. 2021, 126, 1–11. [Google Scholar] [CrossRef]
- Quartarone, G.; Anglani, N.; Riverso, S. Model predictive control: First application of a novel control strategy for adjustable speed drive compressors. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7892–7897. [Google Scholar]
- Levi, E. Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 2015, 63, 433–448. [Google Scholar] [CrossRef] [Green Version]
- Daoud, M.; Elserougi, A.; Abdel-Khalik, A.; Massoud, A.; Bojoi, R.; Ahmed, S. Exploitation of additional degrees of freedom of multiphase drives in low-frequency operation of modular multilevel converters. In Proceedings of the 2019 16th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, 6–8 June 2019; pp. 1–5. [Google Scholar]
- Sala, G.; Mengoni, M.; Rizzoli, G.; Zarri, L.; Tani, A. Decoupled d–q axes current-sharing control of multi-three-phase induction machines. IEEE Trans. Ind. Electron. 2019, 67, 7124–7134. [Google Scholar] [CrossRef]
- Rodas, J.; Gonzalez-Prieto, I.; Kali, Y.; Saad, M.; Doval-Gandoy, J. Recent advances in model predictive and sliding mode current control techniques of multiphase induction machines. Front. Energy Res. 2021, 9, 445. [Google Scholar] [CrossRef]
- Salvador, J.; Alamo, T.; Ramirez, D.; de la Peña, D.M. Model predictive control of partially fading memory systems with binary inputs. J. Process Control 2018, 64, 141–151. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Xu, W.; El-Sousy, F.F.; Islam, M.R.; Ahmed, A.A. Recent Achievements in Model Predictive Control Techniques for Industrial Motor: A Comprehensive State-of-the-Art. IEEE Access 2021, 9, 58170–58191. [Google Scholar] [CrossRef]
- Difi, D.; Halbaoui, K.; Boukhetala, D. High Efficiency and Quick Response of Torque Control for a Multi-Phase Machine Using Discrete/Continuous Approach: Application to Five-phase Permanent Magnet Synchronous Machine. System 2021, 1, 128–133. [Google Scholar] [CrossRef]
- Li, Z.; Guo, Y.; Xia, J.; Li, H.; Zhang, X. Variable sampling frequency model predictive torque control for VSI-fed im drives without current sensors. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 1507–1517. [Google Scholar] [CrossRef]
- González-Prieto, A.; González-Prieto, I.; Duran, M.J.; Aciego, J.J.; Salas-Biedma, P. Current Harmonic Mitigation Using a Multi-Vector Solution for MPC in Six-Phase Electric Drives. IEEE Access 2021, 9, 117761–117771. [Google Scholar] [CrossRef]
- Yuan, Q.; Li, A.; Qian, J.; Xia, K. Dc-link capacitor voltage control for the NPC three-level inverter with a newly MPC-based virtual vector modulation. IET Power Electron. 2020, 13, 1093–1102. [Google Scholar] [CrossRef]
- Song, Z.; Cui, Y.; Wang, Y.; Liu, T. Flux-Trajectory-Optimization-Based Predictive Flux Control of Permanent Magnet Synchronous Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4364–4375. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, H.; Zhang, W.; Jiang, J. Ripple Attenuation for Induction Motor Finite Control Set Model Predictive Torque Control Using Novel Fuzzy Adaptive Techniques. Processes 2021, 9, 710. [Google Scholar] [CrossRef]
- Heydari, R.; Young, H.; Rafiee, Z.; Flores-Bahamonde, F.; Savaghebi, M.; Rodriguez, J. Model-free predictive current control of a voltage source inverter based on identification algorithm. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 19–21 October 2020; pp. 3065–3070. [Google Scholar]
- Negahdari, A.; Yepes, A.G.; Doval-Gandoy, J.; Toliyat, H.A. Efficiency Enhancement of Multiphase Electric Drives at Light-Load Operation Considering Both Converter and Stator Copper Losses. IEEE Trans. Power Electron. 2019, 34, 1518–1525. [Google Scholar] [CrossRef]
- Steckel, R.; Daum, S.; Kremser, A.; Herzog, H.G. Efficiency analysis of three-phase and dual three-phase induction machine with sinusoidal supply. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 523–530. [Google Scholar]
- Wang, S.; Zhang, Y.; Wu, D.; Zhao, J.; Hu, Y. Model predictive current control with lower switching frequency for permanent magnet synchronous motor drives. IET Electr. Power Appl. 2022, 16, 267–276. [Google Scholar] [CrossRef]
- Karttunen, J.; Kallio, S.; Honkanen, J.; Peltoniemi, P.; Silventoinen, P. Stability and performance of current harmonic controllers for multiphase PMSMs. Control Eng. Pract. 2017, 65, 59–69. [Google Scholar] [CrossRef]
- Cimini, G.; Bernardini, D.; Levijoki, S.; Bemporad, A. Embedded model predictive control with certified real-time optimization for synchronous motors. IEEE Trans. Control. Syst. Technol. 2020, 29, 893–900. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Zoric, I.; Duran, M.J.; Levi, E. Constrained model predictive control in nine-phase induction motor drives. IEEE Trans. Energy Convers. 2019, 34, 1881–1889. [Google Scholar] [CrossRef]
- Liu, C.; Luo, Y. Overview of advanced control strategies for electric machines. Chin. J. Electr. Eng. 2017, 3, 53–61. [Google Scholar]
- Arahal, M.R.; Martín, C.; Kowal, A.; Castilla, M.; Barrero, F. Cost function optimization for predictive control of a five-phase IM drive. Optim. Control Appl. Methods 2019, 41, 84–93. [Google Scholar] [CrossRef] [Green Version]
- Mamdouh, M.; Abido, M.A. Weighting factor elimination for predictive current control of asymmetric six phase induction motor. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Arahal, M.R.; Barrero, F.; Durán, M.J.; Ortega, M.G.; Martín, C. Trade-offs analysis in predictive current control of multi-phase induction machines. Control Eng. Pract. 2018, 81, 105–113. [Google Scholar] [CrossRef]
- Bermúdez, M.; Martín, C.; González, I.; Duran, M.J.; Arahal, M.R.; Barrero, F. Predictive current control in electrical drives: An illustrated review with case examples using a five-phase induction motor drive with distributed windings. IET Electr. Power Appl. 2020, 14, 1291–1310. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C. Model Predictive Control; Springer-Verlag London: London, UK, 2013. [Google Scholar]
- Shawier, A.; Habib, A.; Mamdouh, M.; Abdel-Khalik, A.S.; Ahmed, K.H. Assessment of predictive current control of six-phase induction motor with different winding configurations. IEEE Access 2021, 9, 2169–3536. [Google Scholar] [CrossRef]
- Riveros, J.A.; Yepes, A.G.; Barrero, F.; Doval-Gandoy, J.; Bogado, B.; Lopez, O.; Jones, M.; Levi, E. Parameter identification of multiphase induction machines with distributed windings—Part 2: Time-domain techniques. IEEE Trans. Energy Convers. 2012, 27, 1067–1077. [Google Scholar] [CrossRef]
- Bruyère, A.; Semail, E.; Locment, F.; Bouscayrol, A.; Dubus, J.; Mipo, J.C. Identification of sensitive RL parameters of a multiphase drive by a vector control. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 2523–2527. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Variable | Limit |
|---|---|---|---|
| Stator resistance, | 12.85 | Voltage limit | 300 V |
| Rotor resistance, | 4.80 | Current limit, | 2.5 A |
| Stator leakage inductance, | 79.93 mH | Rated d-current, | 0.9 A |
| Rotor leakage inductance, | 79.93 mH | Maximum torque, | 8.13 Nm |
| Mutual inductance, | 681.7 mH | ||
| Rotational inertia, | 0.02 kg m | ||
| Friction, | 0.0118 Nms/rad | ||
| Number of pairs of poles, P | 3 | ||
| Controller | ||||||
|---|---|---|---|---|---|---|
| min (A) | max (A) | min (A) | max (A) | min (Hz) | max (Hz) | |
| Std-FSMPC-a | 0.01591 | 0.01670 | 0.03493 | 0.05922 | 4075 | 4760 |
| Std-FSMPC-b | 0.01905 | 0.02005 | 0.02893 | 0.05569 | 3440 | 4053 |
| Sch-FSMPC | 0.01256 | 0.02005 | 0.02859 | 0.04630 | 3665 | 5751 |
| Case | Contr | THD | ||||||
|---|---|---|---|---|---|---|---|---|
| (rpm) | (A) | (A) | (A) | (Hz) | (%) | |||
| A | 150 | 1.6 | Std-FSMPC | 0.20 | 0.0154 | 0.038 | 6096 | 8.1 |
| A | 150 | 1.6 | Sch-FSMPC | 0.30 | 0.0156 | 0.034 | 5111 | 8.0 |
| B | 280 | 1.8 | Std-FSMPC | 0.20 | 0.0162 | 0.037 | 6651 | 7.5 |
| B | 280 | 1.8 | Sch-FSMPC | 0.35 | 0.0164 | 0.031 | 5721 | 7.5 |
| C | 500 | 2.4 | Std-FSMPC | 0.20 | 0.0171 | 0.036 | 7668 | 7.4 |
| C | 500 | 2.4 | Sch-FSMPC | 0.45 | 0.0172 | 0.029 | 7111 | 7.1 |
| Case | Contr | THD | ||||||
|---|---|---|---|---|---|---|---|---|
| (rpm) | (A) | (A) | (A) | (Hz) | (%) | |||
| A | 150 | 1.6 | Std-FSMPC | 0.20 | 0.121 | 0.112 | 7153 | 8.95 |
| A | 150 | 1.6 | Sch-FSMPC | 0.30 | 0.121 | 0.105 | 7185 | 7.70 |
| B | 280 | 1.8 | Std-FSMPC | 0.20 | 0.130 | 0.115 | 6671 | 7.76 |
| B | 280 | 1.8 | Sch-FSMPC | 0.35 | 0.124 | 0.103 | 6628 | 6.18 |
| C | 500 | 2.4 | Std-FSMPC | 0.20 | 0.132 | 0.109 | 4469 | 7.61 |
| C | 500 | 2.4 | Sch-FSMPC | 0.45 | 0.125 | 0.104 | 6811 | 6.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arahal, M.R.; Barrero, F.; Satué, M.G.; Ramírez, D.R. Predictive Control of Multi-Phase Motor for Constant Torque Applications. Machines 2022, 10, 211. https://doi.org/10.3390/machines10030211
Arahal MR, Barrero F, Satué MG, Ramírez DR. Predictive Control of Multi-Phase Motor for Constant Torque Applications. Machines. 2022; 10(3):211. https://doi.org/10.3390/machines10030211
Chicago/Turabian StyleArahal, Manuel R., Federico Barrero, Manuel G. Satué, and Daniel R. Ramírez. 2022. "Predictive Control of Multi-Phase Motor for Constant Torque Applications" Machines 10, no. 3: 211. https://doi.org/10.3390/machines10030211
APA StyleArahal, M. R., Barrero, F., Satué, M. G., & Ramírez, D. R. (2022). Predictive Control of Multi-Phase Motor for Constant Torque Applications. Machines, 10(3), 211. https://doi.org/10.3390/machines10030211