
A Global Path Planning Method for Unmanned Ground Vehicles in Off-Road Environments Based on Mobility Prediction



Abstract
:1. Introduction
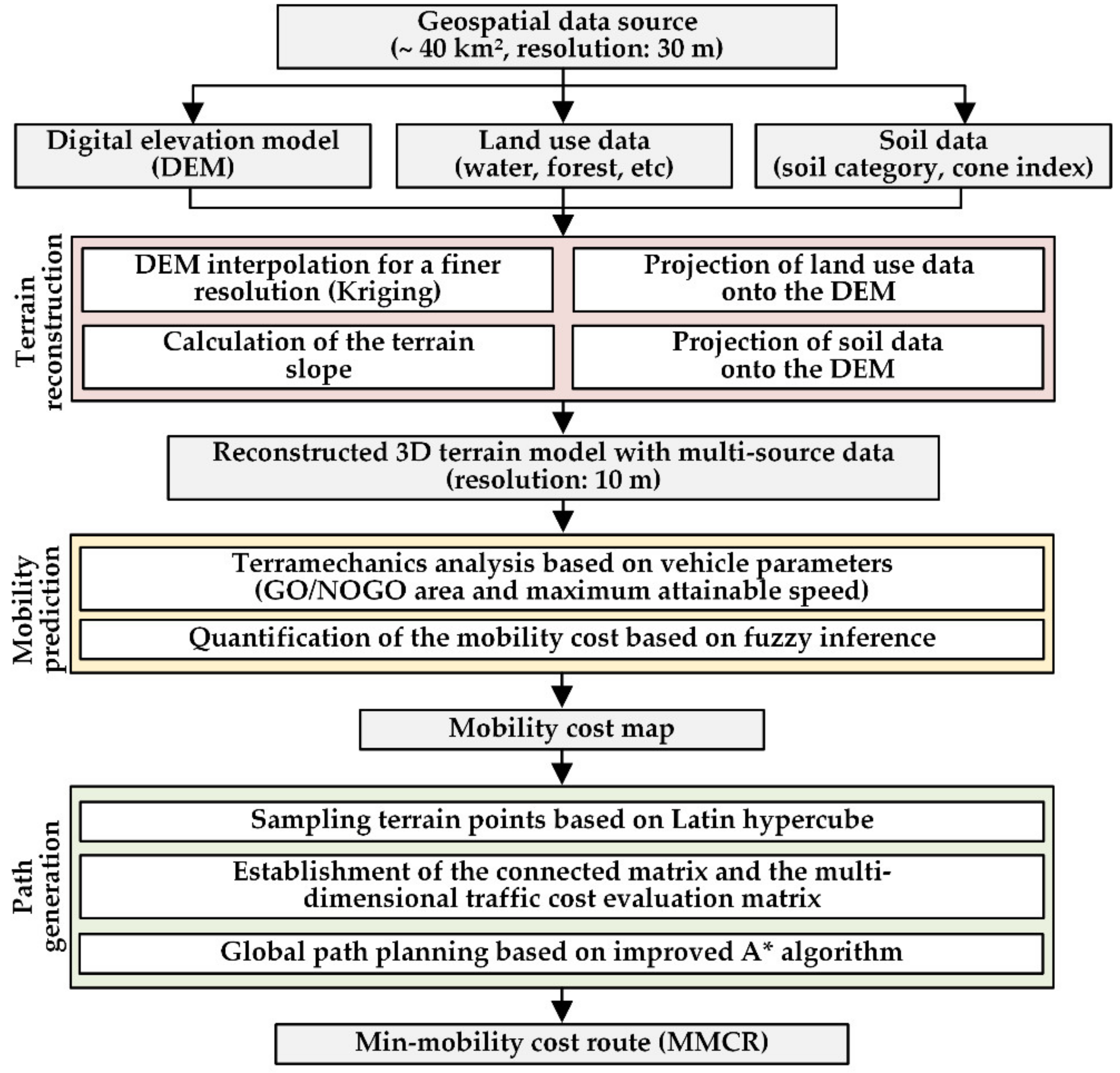
2. Methods
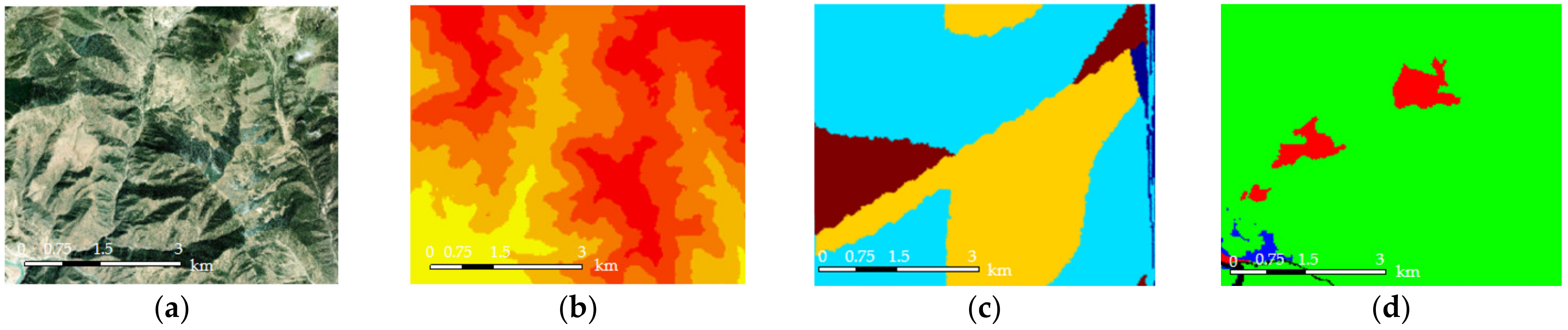
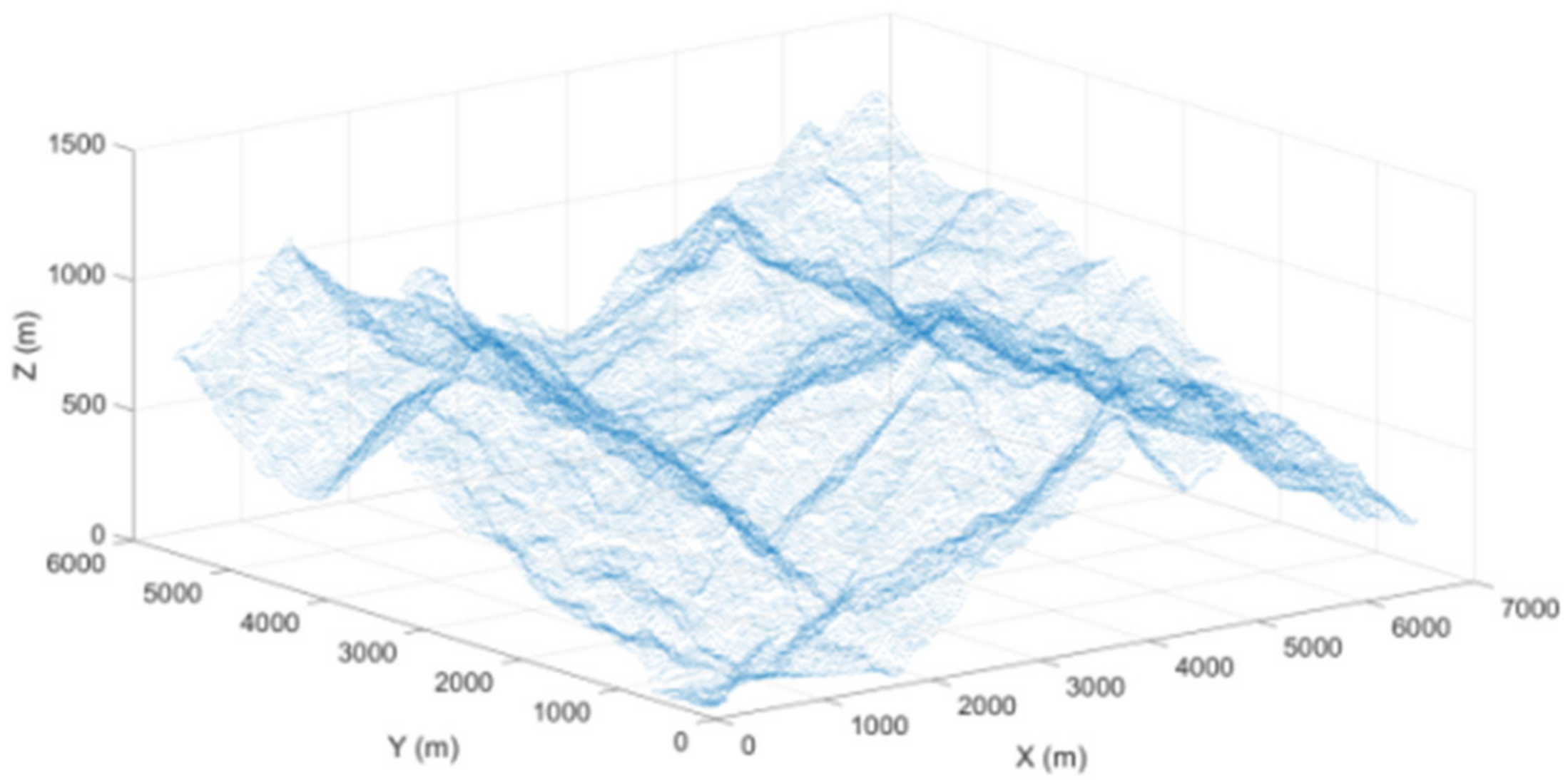
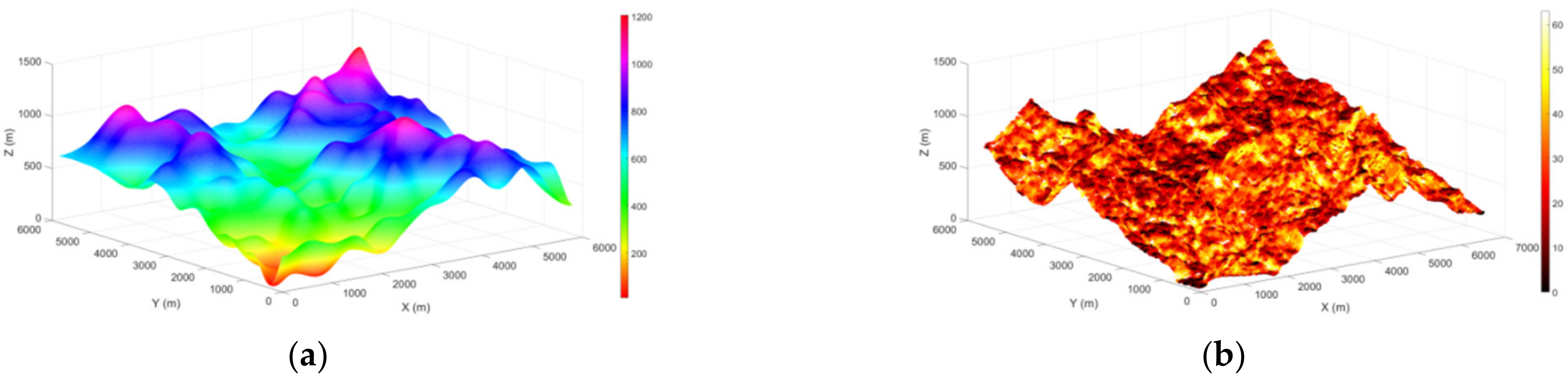
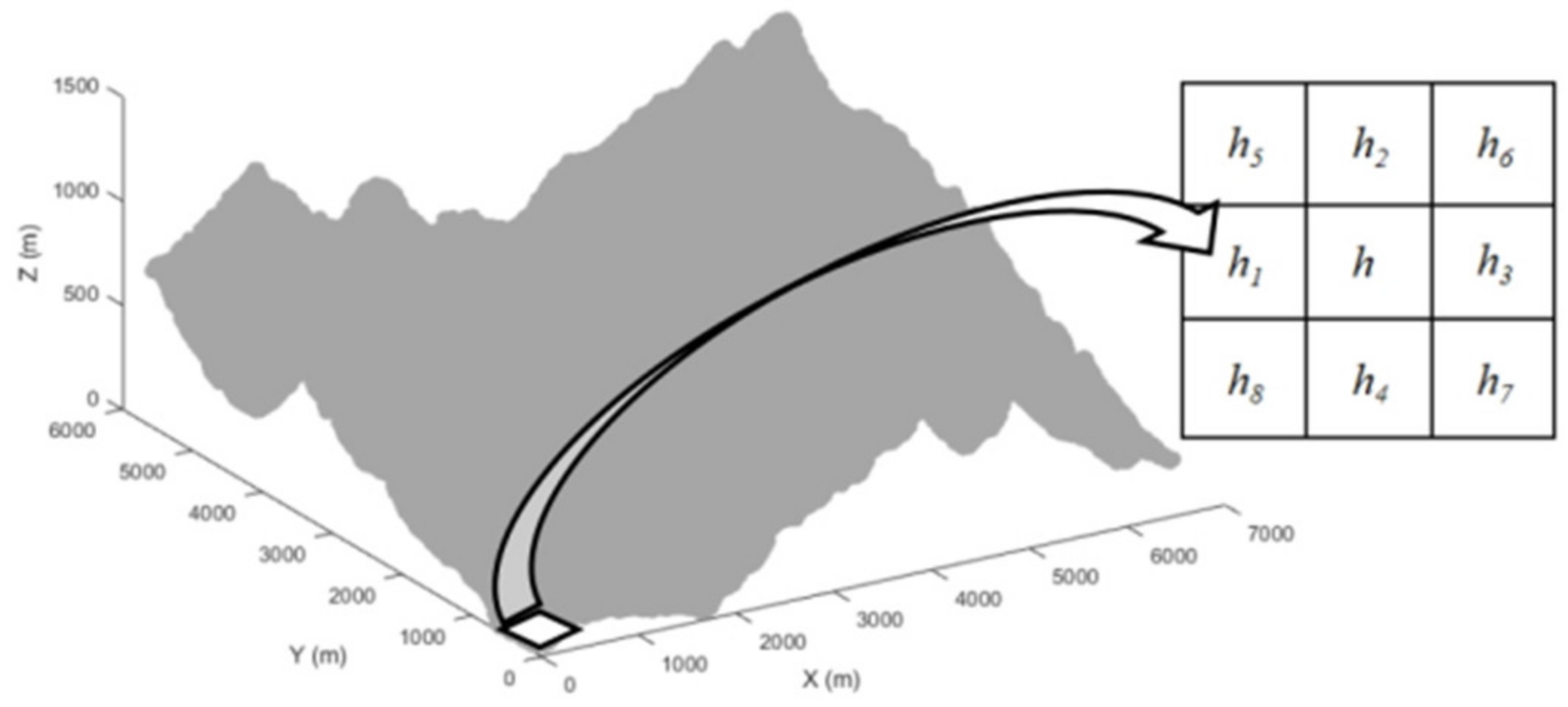
2.1. Terrain Reconstruction
2.2. Terramechanic Analysis
- ·
- If CI VCI50, pass easily
- ·
- If VCI50 > CI VCI1, pass difficultly
- ·
- If CI < VCI1, not pass
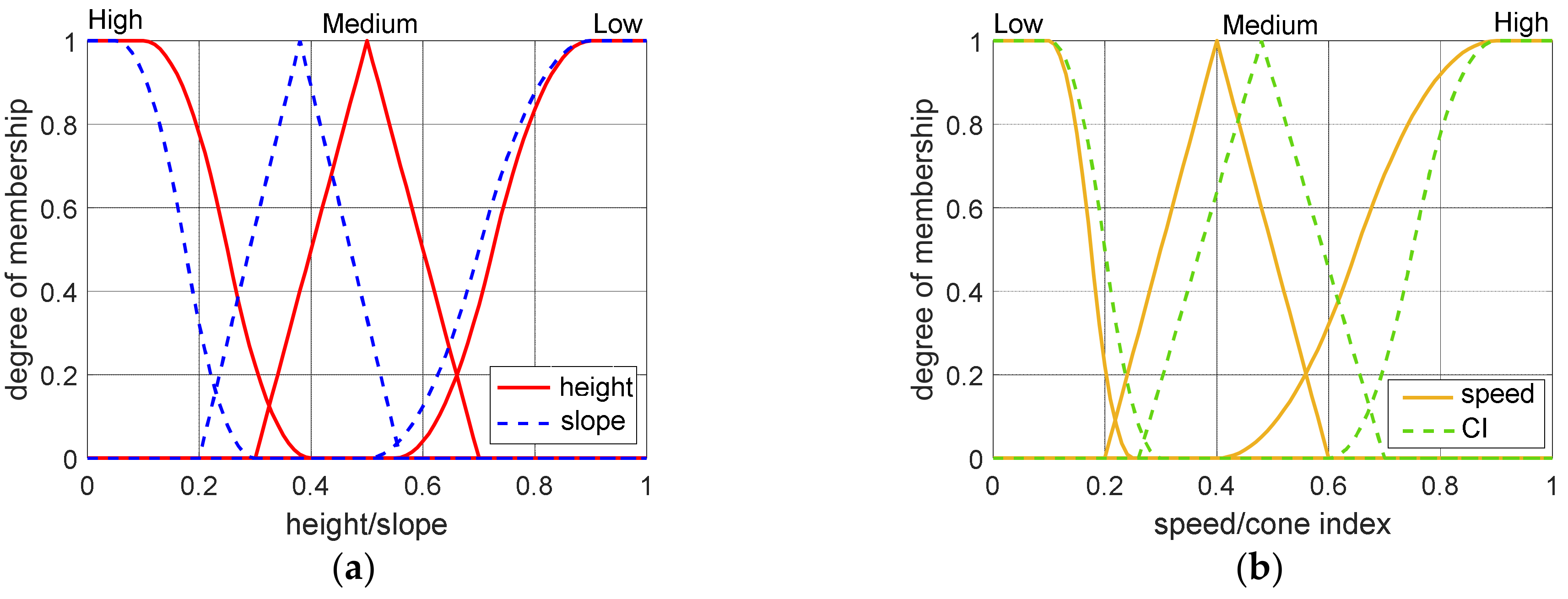
2.3. Mobility Cost Quantification
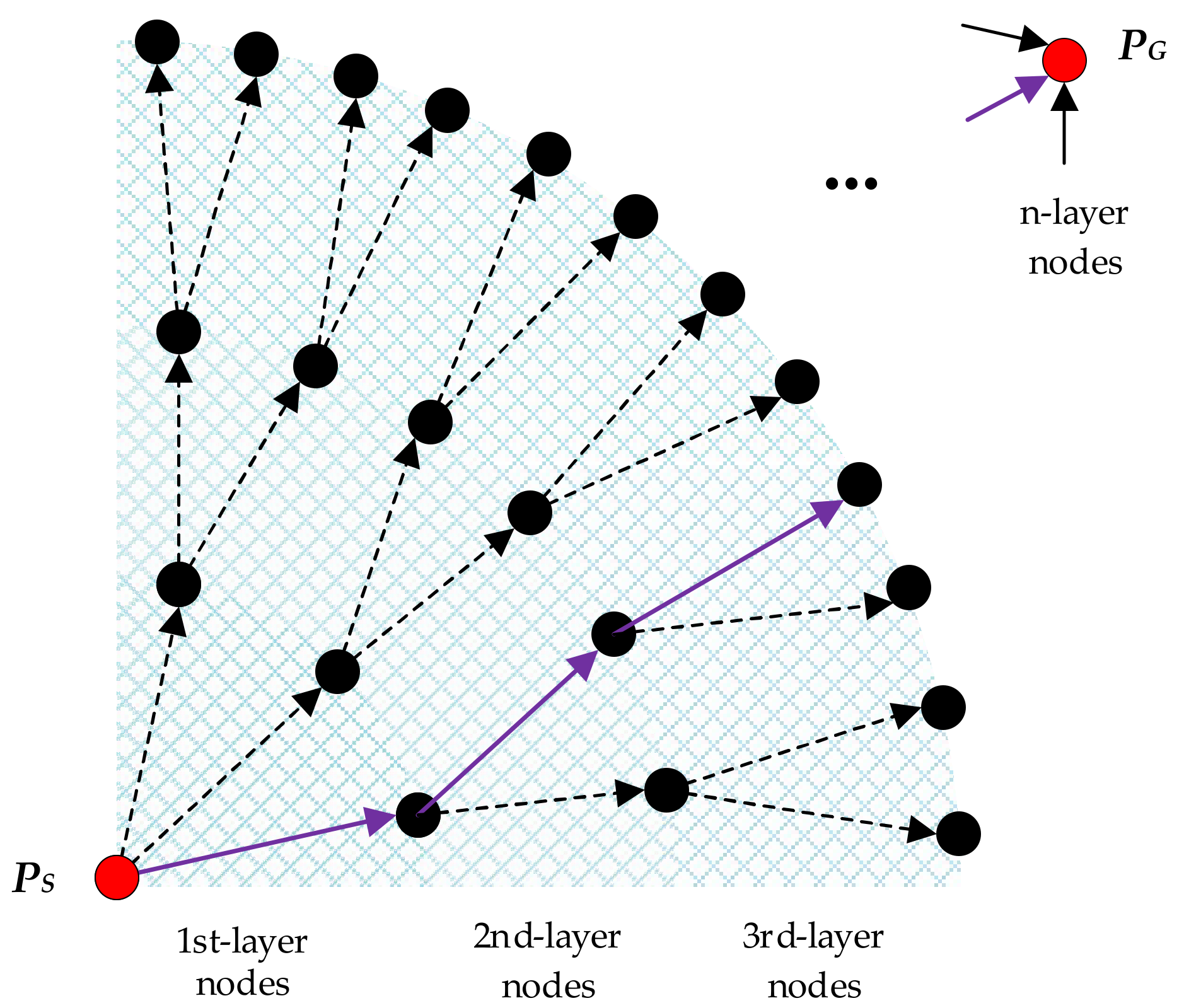
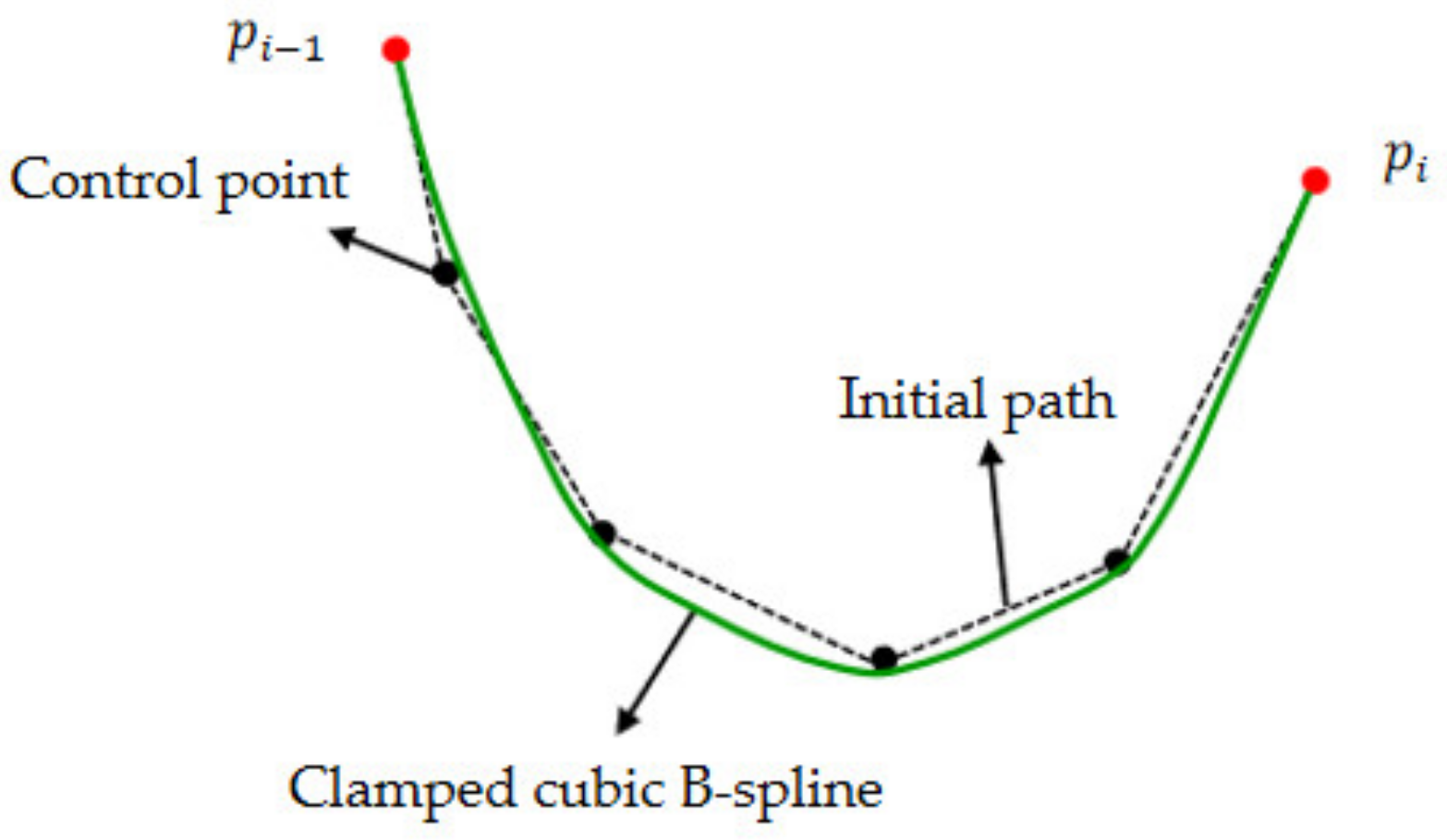
2.4. Path Generation
3. Simulation Experiments and Discussion
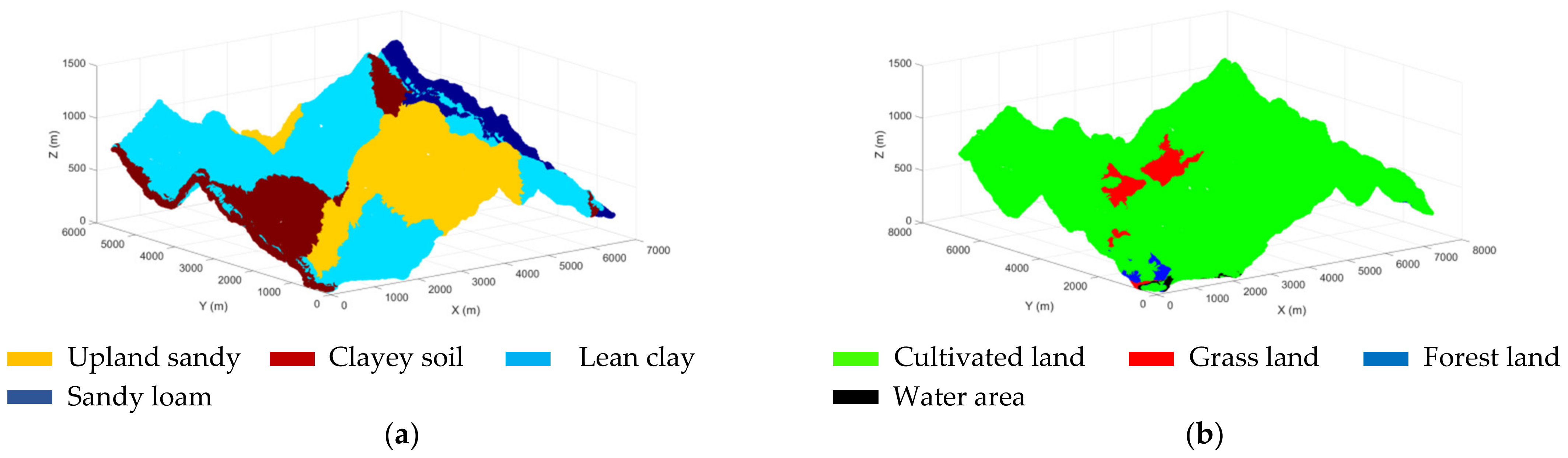
3.1. Experimental Setting
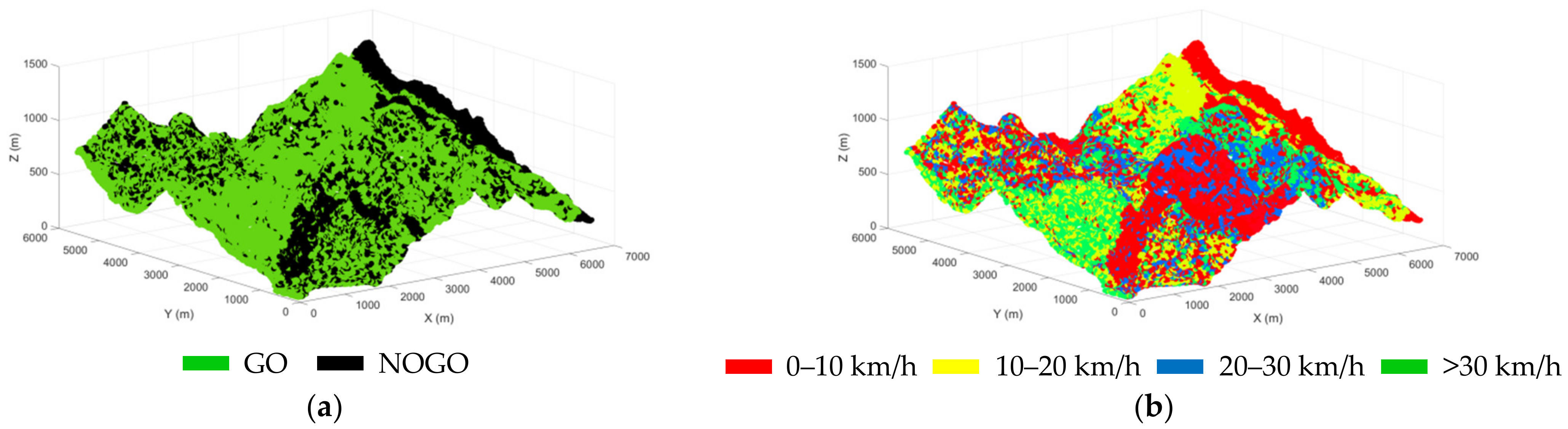
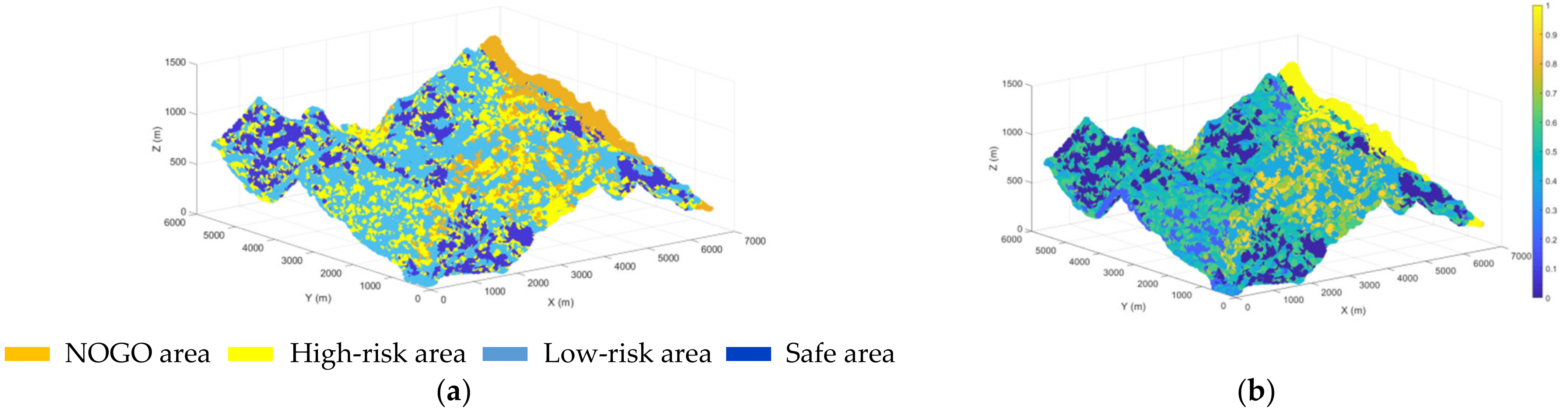
3.2. Mobility Prediction Results
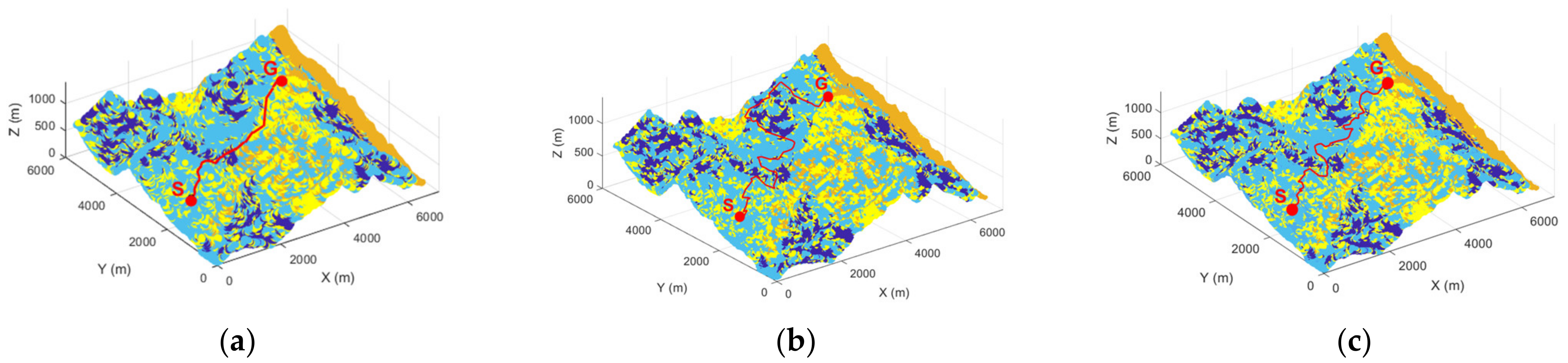
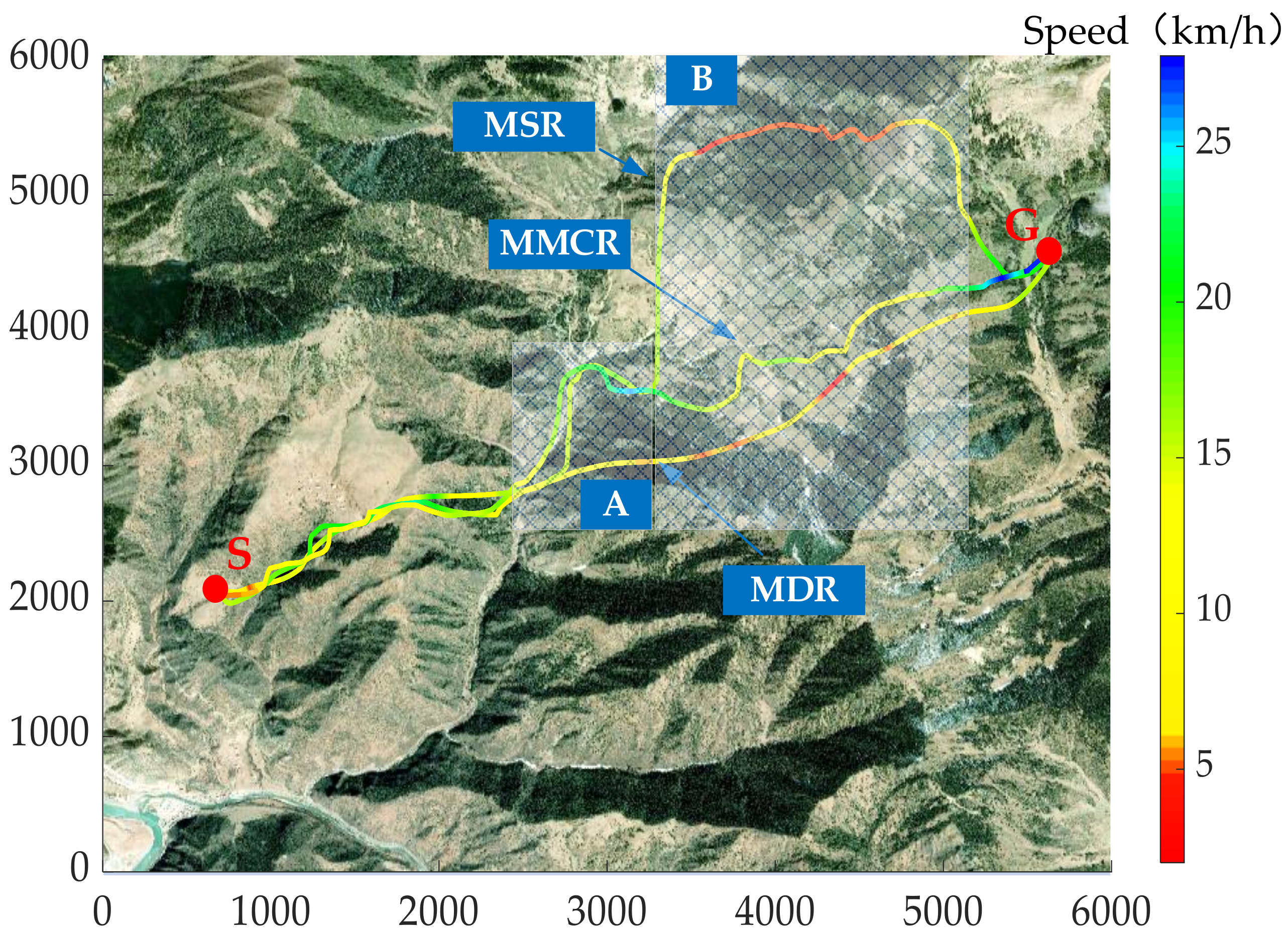
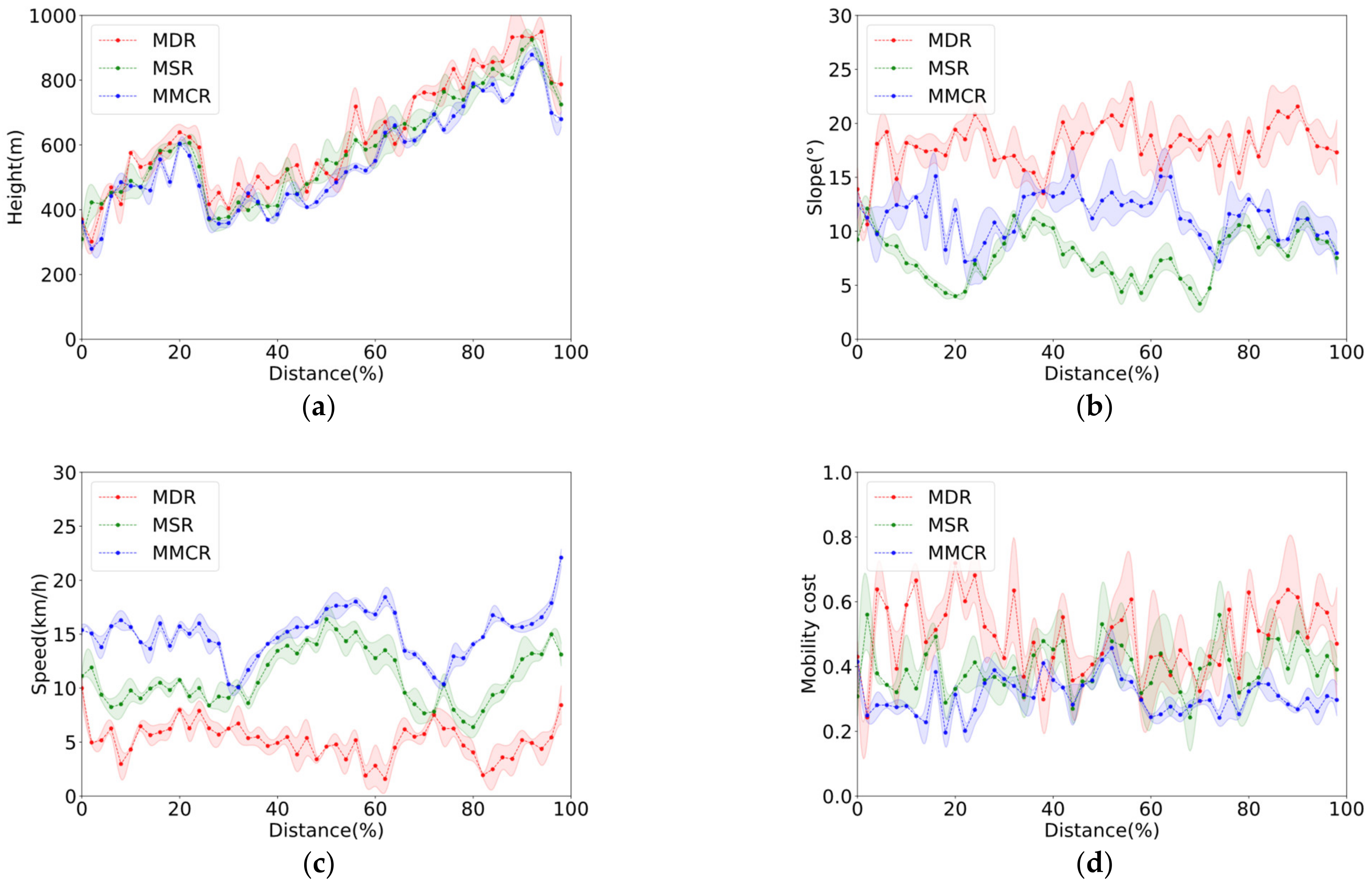
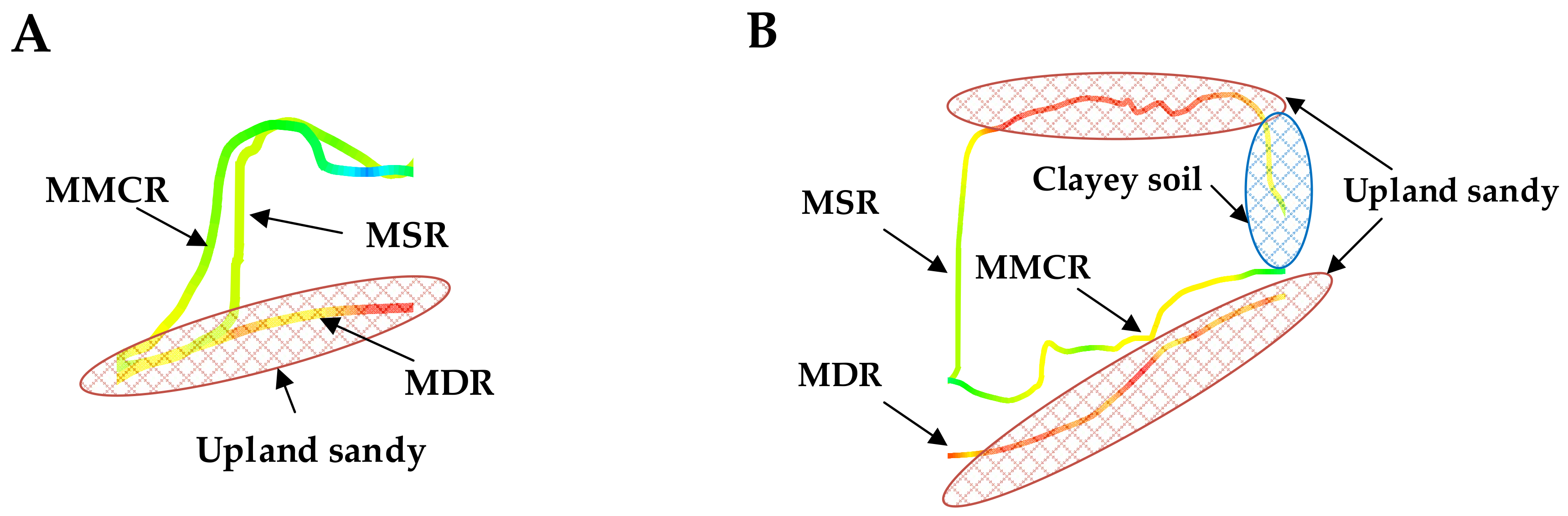
3.3. Path Generation Results
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Projection of Each Data Type

Appendix A.2. The Slope Map Calculation Process

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Fuzzy State | ||
|---|---|---|---|
| Slope | L1 | M1 | H1 |
| Height | L2 | M2 | H2 |
| CI | L3 | M3 | H3 |
| Speed | L4 | M4 | H4 |
| Mobility | L | M | H |
| If L1 and L2 and L3 and L4 then L; | If M1 and M2 and M3 and H4 then H; |
| If L1 and L2 and L3 and M4 then L; | If M1 and M2 and H3 and L4 then M; |
| If L1 and L2 and L3 and H4 then L; | If M1 and M2 and H3 and M4 then M; |
| If L1 and L2 and M3 and L4 then L; | If M1 and M2 and H3 and H4 then H; |
| If L1 and L2 and M3 and M4 then L; | If M1 and H2 and L3 and L4 then L; |
| If L1 and L2 and M3 and H4 then L; | If M1 and H2 and L3 and M4 then M; |
| If L1 and L2 and H3 and L4 then L; | If M1 and H2 and L3 and H4 then M; |
| If L1 and L2 and H3 and M4 then L; | If M1 and H2 and M3 and L4 then M; |
| If L1 and L2 and H3 and H4 then M; | If M1 and H2 and M3 and M4 then H; |
| If L1 and M2 and L3 and L4 then L; | If M1 and H2 and M3 and H4 then H; |
| If L1 and M2 and L3 and M4 then L; | If M1 and H2 and H3 and L4 then M; |
| If L1 and M2 and L3 and H4 then L; | If M1 and H2 and H3 and M4 then H; |
| If L1 and M2 and M3 and L4 then L; | If M1 and H2 and H3 and H4 then H; |
| If L1 and M2 and M3 and M4 then M; | If H1 and L2 and L3 and L4 then L; |
| If L1 and M2 and M3 and H4 then M; | If H1 and L2 and L3 and M4 then L; |
| If L1 and M2 and H3 and L4 then L; | If H1 and L2 and L3 and H4 then M; |
| If L1 and M2 and H3 and M4 then M; | If H1 and L2 and M3 and L4 then L; |
| If L1 and M2 and H3 and H4 then H; | If H1 and L2 and M3 and M4 then M; |
| If L1 and H2 and L3 and L4 then L; | If H1 and L2 and M3 and H4 then M; |
| If L1 and H2 and L3 and M4 then M; | If H1 and L2 and H3 and L4 then M; |
| If L1 and H2 and L3 and H4 then M; | If H1 and L2 and H3 and M4 then M; |
| If L1 and H2 and M3 and L4 then L; | If H1 and L2 and H3 and H4 then M; |
| If L1 and H2 and M3 and M4 then M; | If H1 and M2 and L3 and L4 then L; |
| If L1 and H2 and M3 and H4 then M; | If H1 and M2 and L3 and M4 then M; |
| If L1 and H2 and H3 and L4 then M; | If H1 and M2 and L3 and H4 then M; |
| If L1 and H2 and H3 and M4 then M; | If H1 and M2 and M3 and L4 then M; |
| If L1 and H2 and H3 and H4 then H; | If H1 and M2 and M3 and M4 then M; |
| If M1 and L2 and L3 and L4 then L; | If H1 and M2 and M3 and H4 then H; |
| If M1 and L2 and L3 and M4 then L; | If H1 and M2 and H3 and L4 then M; |
| If M1 and L2 and L3 and H4 then L; | If H1 and M2 and H3 and M4 then H; |
| If M1 and L2 and M3 and L4 then L; | If H1 and M2 and H3 and H4 then H; |
| If M1 and L2 and M3 and M4 then M; | If H1 and H2 and L3 and L4 then M; |
| If M1 and L2 and M3 and H4 then M; | If H1 and H2 and L3 and M4 then M; |
| If M1 and L2 and H3 and L4 then L; | If H1 and H2 and L3 and H4 then H; |
| If M1 and L2 and H3 and M4 then M; | If H1 and H2 and M3 and L4 then M; |
| If M1 and L2 and H3 and H4 then M; | If H1 and H2 and M3 and M4 then H; |
| If M1 and M2 and L3 and L4 then L; | If H1 and H2 and M3 and H4 then H; |
| If M1 and M2 and L3 and M4 then M; | If H1 and H2 and H3 and L4 then H; |
| If M1 and M2 and L3 and H4 then M; | If H1 and H2 and H3 and M4 then H; |
| If M1 and M2 and M3 and L4 then M; | If H1 and H2 and H3 and H4 then H |
| If M1 and M2 and M3 and M4 then M; |
References
- Zhu, P.; Ferrari, S.; Morelli, J.; Linares, R.; Doerr, B. Scalable Gas Sensing, Mapping, and Path Planning via Decentralized Hilbert Maps. Sensors 2019, 19, 1524. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Quann, M.; Ojeda, L.; Smith, W.; Rizzo, D.; Castanier, M.; Barton, K. Off-road Ground Robot Path Energy Cost Prediction Through Probabilistic Spatial Mapping. J. Field Robot. 2019, 37, 421–439. [Google Scholar] [CrossRef]
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 133–155. [Google Scholar] [CrossRef] [Green Version]
- Algfoor, Z.A.; Sunar, M.S.; Abdullah, A. A New Weighted Path Finding Algorithms to Reduce The Search Time on Grid Maps. Expert Syst. Appl. 2017, 71, 319–331. [Google Scholar] [CrossRef]
- Norhafezah, K.; Nurfadzliana, A.H.; Megawati, O. Simulation of Municipal Solid Waste Route Optimization by Dijkstra’s Algorithm. J. Fundam. Appl. Sci. 2018, 9, 732–747. [Google Scholar] [CrossRef] [Green Version]
- Alazzam, H.H.; Abualghanam, O.; Sharieh, A.A. Best Path in Mountain Environment Based on Parallel A* Algorithm and Apache Spark. J. Supercomput. 2021, 78, 5075–5094. [Google Scholar] [CrossRef]
- Shi, J.; Liu, C.; Xi, H. Improved D* Path Planning Algorithm Based on CA Model. J. Electron. Meas. Instrum. 2016, 30, 30–37. [Google Scholar]
- Wang, Z.; Zeng, G.; Huang, B.; Fang, Z. Global Optimal Path Planning for Robots with Improved A* Algorithm. Comput. Appl. 2019, 39, 2517–2522. [Google Scholar]
- Guruji, A.K.; Agarwal, H.; Parsediya, D.K. Time Efficient A Algorithm for Robot Path Planning. Procedia Technol. 2016, 23, 144–149. [Google Scholar] [CrossRef] [Green Version]
- Duan, S.; Wang, Q.; Han, X. Improved A-star Algorithm for Safety Insured Optimal Path with Smoothed Corner Turns. J. Mech. Eng. 2020, 56, 205–215. [Google Scholar]
- Li, Y.; Cui, R.; Li, Z.; Xu, D.M. Neural Network Approximation Based Near-optimal Motion Planning with Knodynamic Constraints Using RRT. IEEE Trans. Ind. Electron. 2018, 65, 8718–8729. [Google Scholar] [CrossRef]
- Xu, Z.; Deng, D.; Shimada, K. Autonomous UAV Exploration of Dynamic Environments via Incremental Sampling and Probabilistic Roadmap. IEEE Robot. Autom. Lett. 2021, 6, 2729–2736. [Google Scholar] [CrossRef]
- Gammell, J.D.; Barfoot, T.D.; Srinivasa, S.S. Informed Sampling for Asymptotically Optimal Path Planning. IEEE Trans. Robot. 2018, 34, 966–984. [Google Scholar] [CrossRef] [Green Version]
- Dolgov, D.; Thrun, S.; Montemerlo, M. Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Zaid, T.; Qureshi, A.H.; Yasar, A.; Nawaz, R. Potentially Guided Bidirectionalized RRT* for Fast Optimal Path Planning in Cluttered Environments. Robot. Auton. Syst. 2018, 108, 13–27. [Google Scholar]
- Park, B.; Choi, J.; Chung, W.K. Incremental Hierarchical Roadmap Construction for Efficient Path Planning. ETRI J. 2018, 40, 458–470. [Google Scholar] [CrossRef]
- Cheng, C.Q.; Hao, X.Y.; Li, J.S. Global dynamic path planning based on improved A* algorithm and dynamic window method. J. Xi’an Jiao Tong Univ. 2017, 51, 137–143. [Google Scholar]
- Hu, J.; Hu, Y.; Lu, C. Integrated Path Planning for Unmanned Differential Steering Vehicles in Off-Road Environment with 3D Terrains and Obstacles. IEEE Trans. Intell. Transp. Syst. 2021, 18, 1–11. [Google Scholar] [CrossRef]
- Gonzalez, R.; Jayakumar, P.; Iagnemma, K. Stochastic Mobility Prediction of Ground Vehicles over Large Spatial Regions: A Geostatistical Approach. Auton. Robot. 2017, 41, 311–331. [Google Scholar] [CrossRef]
- Jiang, C.; Hu, Z.; Mourelatos, Z.P.; Gorsich, D.; Jayakumar, P.; Fu, Y.; Majcher, M. R2-RRT*: Reliability-Based Robust Mission Planning of Off-Road Autonomous Ground Vehicle Under Uncertain Terrain Environment. IEEE Trans. Autom. Sci. Eng. 2022, 19, 1030–1046. [Google Scholar] [CrossRef]
- Lv, T.; Feng, M. A Smooth Local Path Planning Algorithm Based on Modified Visibility Graph. Mod. Phys. Lett. B 2017, 31, 174–184. [Google Scholar] [CrossRef]
- Liu, J.; Ji, J.; Ren, Y.; Huang, Y.J.; Wang, H. Path Planning for Vehicle Active Collision Avoidance Based on Virtual Flow Field. Int. J. Automot. Technol. 2021, 22, 1557–1567. [Google Scholar] [CrossRef]
- Choi, K.K.; Jayaktumar, P.; Funk, M.; Gatul, N.; Wasfy, T.M. Framework of Reliability-Based Stochastic Mobility Map for Next Generation NATO Reference Mobility Model. J. Comput. Nonlinear Dyn. 2018, 14, 132–143. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez, R.; Jayakumar, P.; Iagnemma, K. An Efficient Method for Increasing the Accuracy of Mobility Maps for Ground Vehicles. J. Terramech. 2016, 68, 23–35. [Google Scholar] [CrossRef]
- Wong, J.Y.; Jayakumar, P.; Toma, E. A Review of Mobility Metrics for Next Generation Vehicle Mobility Models. J. Terramech. 2020, 87, 11–20. [Google Scholar] [CrossRef]
- Wong, J.Y.; Jayakumar, P.; Toma, E. Comparison of Simulation Models NRMM and NTVPM for Assessing Military Tracked Vehicle Cross-country Performance. J. Terramech. 2018, 80, 31–48. [Google Scholar] [CrossRef]
- Wasfy, T.M.; Jayakumar, P. Next-generation NATO Reference Mobility Model Complex Terramechanics—Part 2: Requirements and Prototype. J. Terramech. 2021, 5, 59–79. [Google Scholar] [CrossRef]
- George, A.K.; Singh, H.; Dattathreya, M.S.; Meitzler, T.J. A Fuzzy Simulation Model for Military Vehicle Mobility Assessment. Adv. Fuzzy Syst. 2017, 23, 179–191. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Ri, M.; Wu, D.R.; Ri, S. Interval Type-2 Fuzzy Logic Modeling and Control of a Mobile Two-Wheeled Inverted Pendulum. IEEE Trans. Fuzzy Syst. 2018, 26, 2030–2038. [Google Scholar] [CrossRef]
- Yang, F. Research on Key Techniques of Vehicle Trafficability Based on Wheel Force Test. Ph.D. Thesis, Southeast University, Nanjing, China, May 2016. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 4th ed.; Machine Press: Beijing, China, 2018; pp. 210–268. [Google Scholar]
- Sonker, R.; Dutta, A. Adding Terrain Height to Improve Model Learning for Path Tracking on Uneven Terrain by a Four-Wheel Robot. IEEE Robot. Autom. Lett. 2020, 6, 239–246. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, Y.; Fu, M.; Wang, M.L. Traversability Assessment and Trajectory Planning of Unmanned Ground Vehicles with Suspension Systems on Rough Terrain. Sensors 2019, 19, 4372. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mechergui, D.; Jayakumar, P. Efficient Generation of Accurate Mobility Maps Using Machine Learning Algorithms. J. Terramech. 2020, 88, 53–63. [Google Scholar] [CrossRef]
- Yang, P.; Zang, M.; Zeng, H. An efficient 3D DEM-FEM Contact Detection Algorithm for Tire-sand Interaction. Powder Technol. 2020, 360, 1102–1116. [Google Scholar] [CrossRef]


















| Parameters | Gross Mass/kg | Clearance/m | Number of Axles | Number of Tires | Tire Load/N | Tire Width/m | Tire Radius/m | Engine Power/kW |
|---|---|---|---|---|---|---|---|---|
| Value | 1242 | 0.45 | 2 | 4 | 3200 | 0.40 | 0.51 | 262 |
| Soil Type | Moisture Content (%) | Deformation Index (n) | Cohesive Force Modulus (kN/mn+1) | Internal Friction Modulus (kN/mn+2) | Sinkage (m) | Rolling Resistance (kN) | Cone Index (kN/m2) |
| Sandy loam | 26 | 0.30 | 2.79 | 141.11 | 0.51 | 18.84 | 223.40 |
| Clayey soil | 38 | 0.50 | 13.19 | 692.15 | 0.13 | 8.86 | 732.50 |
| Lean clay | 22 | 0.20 | 16.43 | 1724.69 | 0.02 | 3.11 | 1070.50 |
| Upland sandy | 51 | 1.10 | 74.60 | 2080.00 | 0.16 | 9.32 | 528.50 |
| Route | Distance (m) | Average Height (m) | Average Slope (°) | Average Speed (km/h) | Average Mobility Cost | Traversal Time (h) |
|---|---|---|---|---|---|---|
| MDR | 6724 | 628.8 | 20.9 | 5.3 | 0.48 | 1.47 |
| MSR | 11,670 | 593.2 | 8.5 | 11.5 | 0.40 | 1.01 |
| MMCR | 8306 | 551.1 | 12.4 | 13.8 | 0.32 | 0.62 |
| Route | Distance (m) | Average Height (m) | Average Slope (°) | Average Speed (km/h) | Traversal Time (h) |
|---|---|---|---|---|---|
| MDR | 1465 | 518.7 | 16.1 | 4.8 | 0.31 |
| MSR | 2734 | 563.4 | 8.8 | 8.9 | 0.30 |
| MMCR | 2267 | 500.2 | 9.1 | 13.3 | 0.17 |
| Route | Distance (m) | Average Height (m) | Average Slope (°) | Average Speed (km/h) | Traversal Time (h) |
|---|---|---|---|---|---|
| MDR | 2890 | 708.7 | 18.3 | 3.9 | 0.74 |
| MSR | 4518 | 686.4 | 10.8 | 7.2 | 0.63 |
| MMCR | 3321 | 644.2 | 13.3 | 12.1 | 0.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, C.; Niu, R.; Yu, B.; Zheng, X.; Bai, R.; Zhang, S. A Global Path Planning Method for Unmanned Ground Vehicles in Off-Road Environments Based on Mobility Prediction. Machines 2022, 10, 375. https://doi.org/10.3390/machines10050375
Hua C, Niu R, Yu B, Zheng X, Bai R, Zhang S. A Global Path Planning Method for Unmanned Ground Vehicles in Off-Road Environments Based on Mobility Prediction. Machines. 2022; 10(5):375. https://doi.org/10.3390/machines10050375
Chicago/Turabian StyleHua, Chen, Runxin Niu, Biao Yu, Xiaokun Zheng, Rengui Bai, and Song Zhang. 2022. "A Global Path Planning Method for Unmanned Ground Vehicles in Off-Road Environments Based on Mobility Prediction" Machines 10, no. 5: 375. https://doi.org/10.3390/machines10050375
APA StyleHua, C., Niu, R., Yu, B., Zheng, X., Bai, R., & Zhang, S. (2022). A Global Path Planning Method for Unmanned Ground Vehicles in Off-Road Environments Based on Mobility Prediction. Machines, 10(5), 375. https://doi.org/10.3390/machines10050375