
Fault Detection of Bearing by Resnet Classifier with Model-Based Data Augmentation



Abstract
:1. Introduction
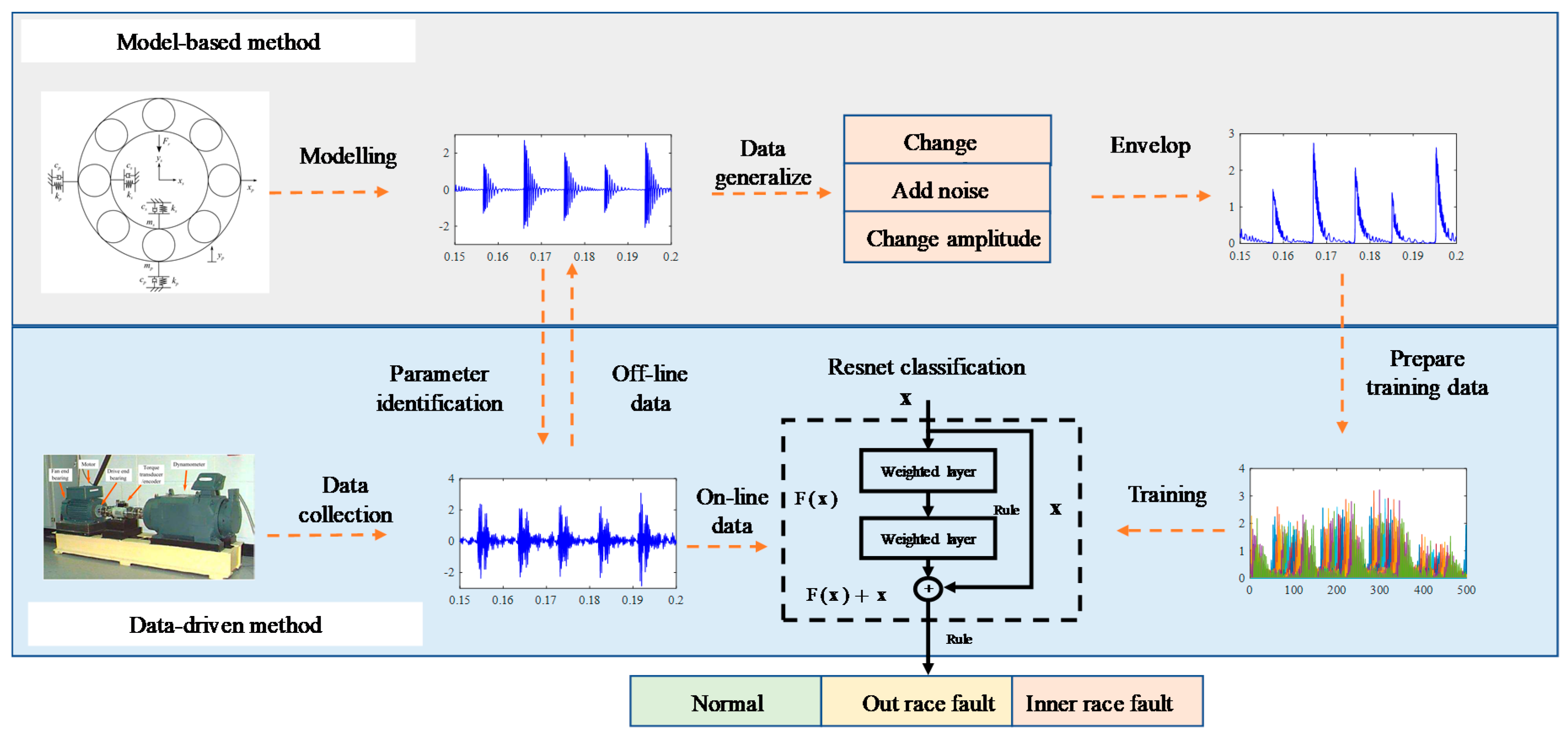
2. Methodology of Data Augmentation
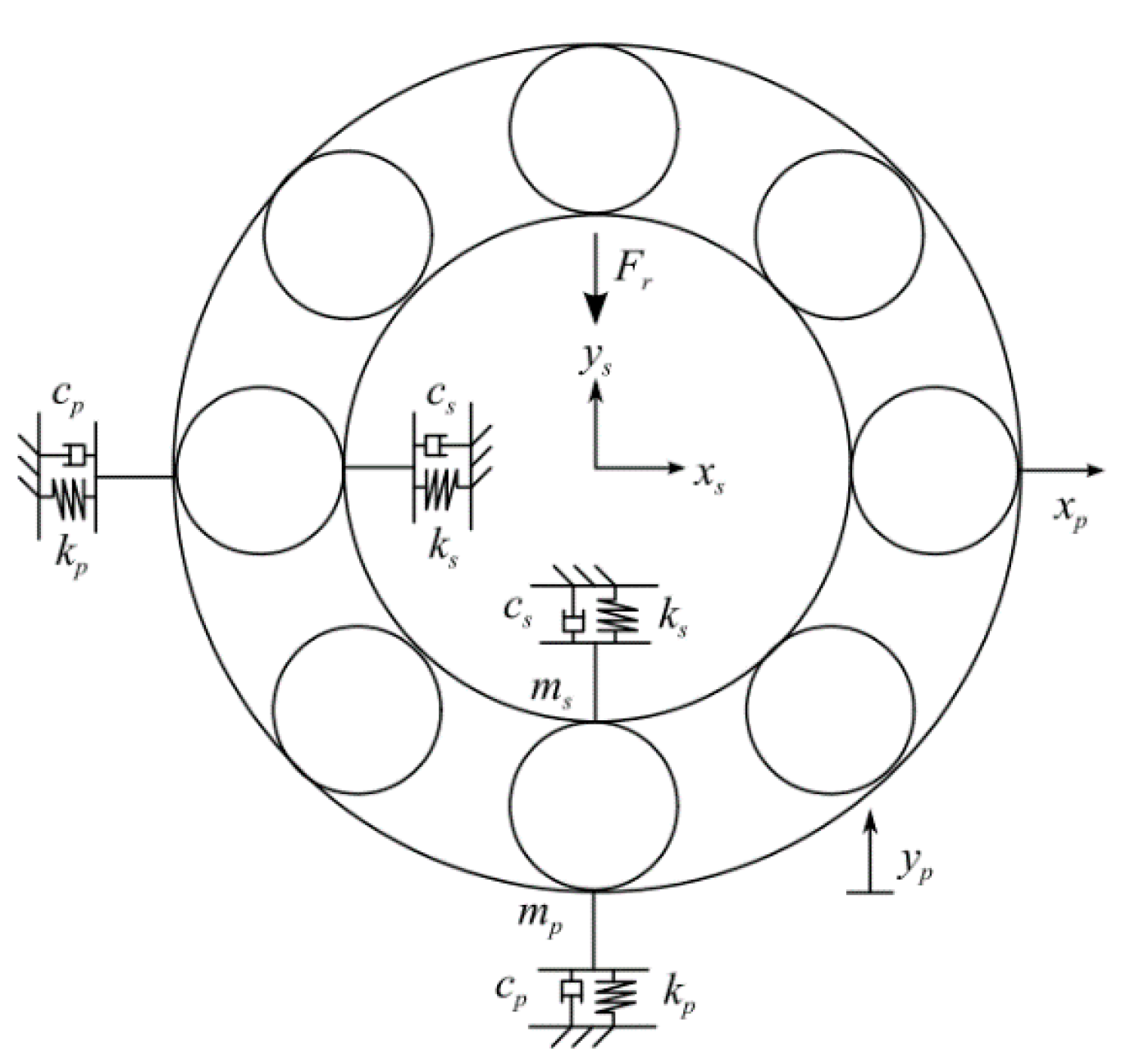
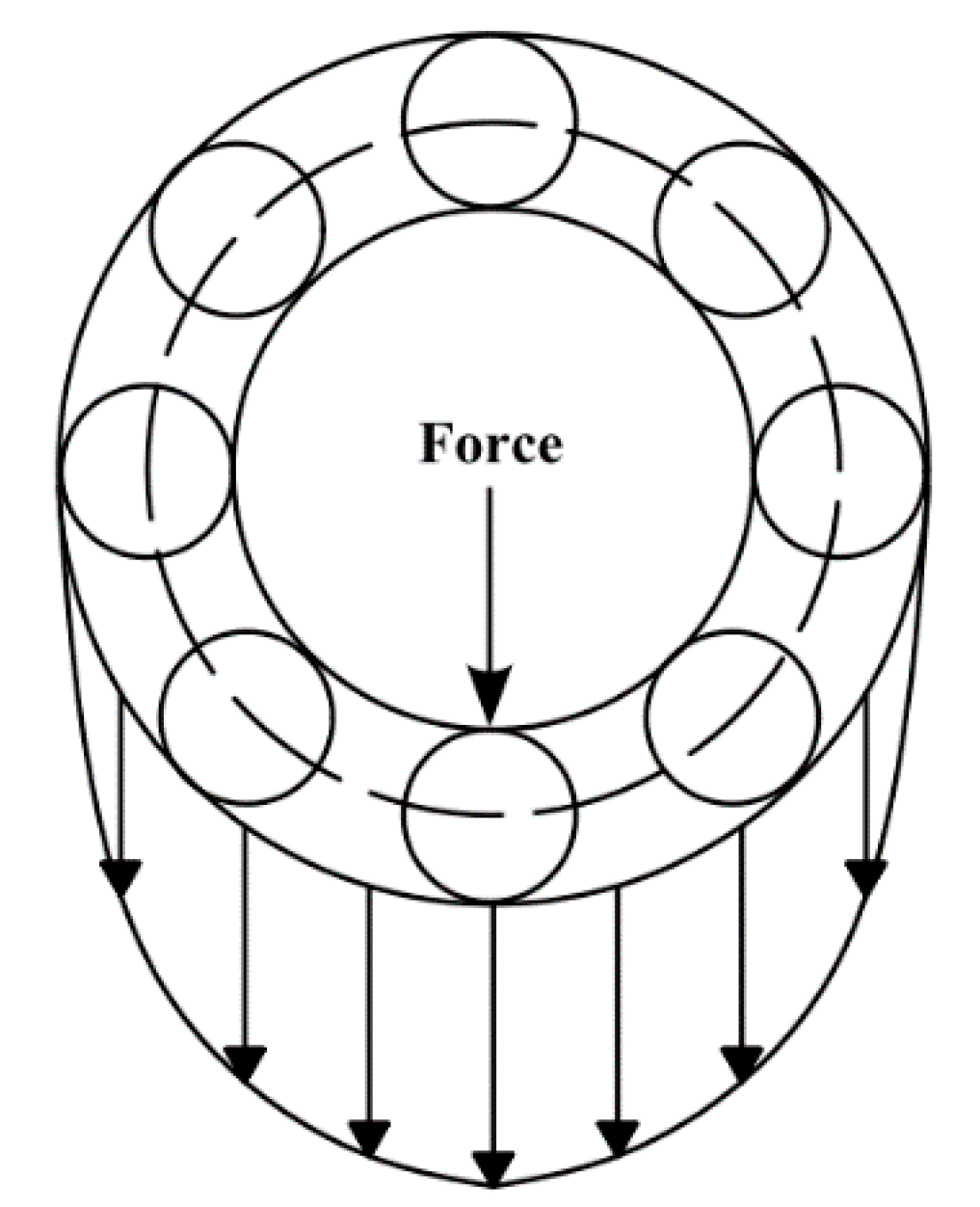
2.1. Model-Based Data Augmentation
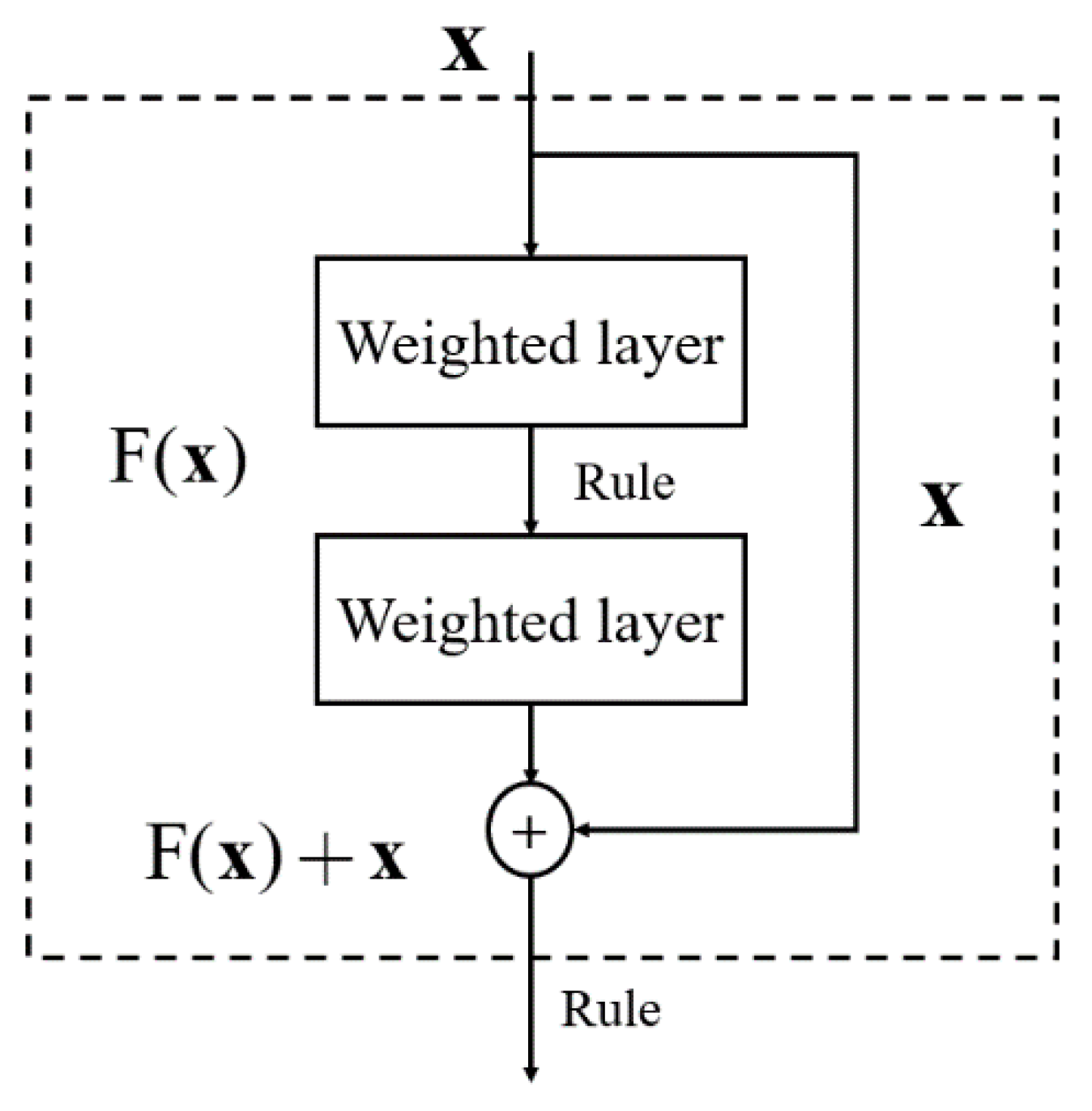
2.2. Deep Residual Network for Fault Detection
3. Experimental Verification
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| shaft/inner race DOF | |
| pedestal/outer race DOF | |
| mass of shaft/inner race | |
| mass of pedestal/outer race | |
| damping of shaft/inner race | |
| damping of pedestal/outer race | |
| stiffness of shaft/inner race | |
| ball diameter | |
| pitch circle diameter | |
| angular velocity of the shaft | |
| angular velocity of the cage | |
| angular velocity of the rolling element | |
| angular position of the rolling elements | |
| overall contact deformation | |
| c | clearance value |
| initial angular position of cage | |
| fault depth | |
| angular position of the fault | |
| initial angular position of the fault |
References
- Qian, L. Observer-Based Fault Detection and Estimation of Rolling Element Bearing Systems; Shaker Verlag: Herzogenrath, Germany, 2019. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Mebarki, N.; Benmoussa, S.; Djeziri, M.; Mouss, L.H. New Approach for Failure Prognosis Using a Bond Graph, Gaussian Mixture Model and Similarity Techniques. Processes 2022, 10, 435. [Google Scholar] [CrossRef]
- Zhang, Z.; Si, X.; Hu, C.; Lei, Y. Degradation data analysis and remaining useful life estimation: A review on Wiener-process-based methods. Eur. J. Oper. Res. 2018, 271, 775–796. [Google Scholar] [CrossRef]
- Lv, Y.; Zhao, W.; Zhao, Z.; Li, W.; Ng, K.K. Vibration signal-based early fault prognosis: Status quo and applications. Adv. Eng. Inform. 2022, 52, 101609. [Google Scholar] [CrossRef]
- Pająk, M.; Muślewski, Ł.; Landowski, B.; Kałaczyński, T.; Kluczyk, M.; Kolar, D. Identification of Reliability States of a Ship Engine of the Type Sulzer 6AL20/24. SAE Int. J. Engines 2021, 15, 527–542. [Google Scholar] [CrossRef]
- Dyer, D.; Stewart, R. Detection of rolling element bearing damage by statistical vibration analysis. J. Mech. Des. 1978, 100, 229–235. [Google Scholar] [CrossRef]
- Choy, K.; Gunter, E.; Allaire, P. Fast fourier transform analysis of rotor-bearing systems. Topics in Fluid Film Bearing and Rotor Bearing System Design and Optimization. 1978. Available online: https://www.academia.edu/download/86674071/fast_fourier_transform_analysis_of_rotot1980v2_linked.pdf (accessed on 27 May 2022).
- Too, J.; Abdullah, A.R.; Mohd Saad, N.; Mohd Ali, N. Feature selection based on binary tree growth algorithm for the classification of myoelectric signals. Machines 2018, 6, 65. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wang, J.; Wang, Z. Bearing Faulty Prediction Method Based on Federated Transfer Learning and Knowledge Distillation. Machines 2022, 10, 376. [Google Scholar] [CrossRef]
- Sun, Q.; Tang, Y. Singularity analysis using continuous wavelet transform for bearing fault diagnosis. Mech. Syst. Signal Process. 2002, 16, 1025–1041. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 351, 108–126. [Google Scholar] [CrossRef]
- Chen, H.; Chai, Z.; Dogru, O.; Jiang, B.; Huang, B. Data-driven designs of fault detection systems via neural network-aided learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Yuan, H.; Wu, N.; Chen, X.; Wang, Y. Fault diagnosis of rolling bearing based on shift invariant sparse feature and optimized support vector machine. Machines 2021, 9, 98. [Google Scholar] [CrossRef]
- Yiakopoulos, C.T.; Gryllias, K.C.; Antoniadis, I.A. Rolling element bearing fault detection in industrial environments based on a K-means clustering approach. Expert Syst. Appl. 2011, 38, 2888–2911. [Google Scholar] [CrossRef]
- Samanta, B.; Al-Balushi, K.; Al-Araimi, S. Artificial neural networks and support vector machines with genetic algorithm for bearing fault detection. Eng. Appl. Artificial Intell. 2003, 16, 657–665. [Google Scholar] [CrossRef]
- Lv, Y.; Zhou, Q.; Li, Y.; Li, W. A predictive maintenance system for multi-granularity faults based on AdaBelief-BP neural network and fuzzy decision making. Adv. Eng. Inform. 2021, 49, 101318. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, H. Fault diagnosis of an autonomous vehicle with an improved SVM algorithm subject to unbalanced datasets. IEEE Trans. Ind. Electron. 2020, 68, 6248–6256. [Google Scholar] [CrossRef]
- Zhang, N.; Li, Y.; Yang, X.; Zhang, J. Bearing Fault Diagnosis Based on BP Neural Network and Transfer Learning. J. Phys. Conf. Ser. 2021, 1881, 022084. [Google Scholar] [CrossRef]
- Ding, H.; Gao, R.X.; Isaksson, A.J.; Landers, R.G.; Parisini, T.; Yuan, Y. State of AI-based monitoring in smart manufacturing and introduction to focused section. IEEE/ASME Trans. Mechatron. 2020, 25, 2143–2154. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Kolar, D.; Lisjak, D.; Pająk, M.; Pavković, D. Fault diagnosis of rotary machines using deep convolutional neural network with wide three axis vibration signal input. Sensors 2020, 20, 4017. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional neural network based fault detection for rotating machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Mao, W.; Feng, W.; Liang, X. A novel deep output kernel learning method for bearing fault structural diagnosis. Mech. Syst. Signal Process. 2019, 117, 293–318. [Google Scholar] [CrossRef]
- Zhang, R.; Tao, H.; Wu, L.; Guan, Y. Transfer learning with neural networks for bearing fault diagnosis in changing working conditions. IEEE Access 2017, 5, 14347–14357. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Shijie, J.; Ping, W.; Peiyi, J.; Siping, H. Research on data augmentation for image classification based on convolution neural networks. In Proceedings of the 2017 Chinese Automation Congress CAC, Jinan, China, 2–22 October 2017; IEEE: Piscataway, NJ, USA; p. 4165. [Google Scholar]
- Kim, S.; Kim, N.H.; Choi, J.H. Prediction of remaining useful life by data augmentation technique based on dynamic time warping. Mech. Syst. Signal Process. 2020, 136, 106486. [Google Scholar] [CrossRef]
- Yu, K.; Lin, T.R.; Ma, H.; Li, X. A multi-stage semi-supervised learning approach for intelligent fault diagnosis of rolling bearing using data augmentation and metric learning. Mech. Syst. Signal Process. 2021, 146, 107043. [Google Scholar] [CrossRef]
- Hu, T.; Tang, T.; Chen, M. Data simulation by resampling—A practical data augmentation algorithm for periodical signal analysis-based fault diagnosis. IEEE Access 2019, 7, 125133–125145. [Google Scholar] [CrossRef]
- Lu, H.; Zhao, X.; Tao, B.; Ding, H. A state-classification approach for light-weight robotic drilling using model-based data augmentation and multi-level deep learning. Mech. Syst. Signal Process. 2022, 167, 108480. [Google Scholar] [CrossRef]
- Sobie, C.; Freitas, C.; Nicolai, M. Simulation-driven machine learning: Bearing fault classification. Mech. Syst. Signal Process. 2018, 99, 403–419. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges, and perspectives. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1700–1716. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B. A review of fault detection and diagnosis for the traction system in high-speed trains. IEEE Trans. Intell. Transp. Syst. 2019, 21, 450–465. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B. Simulating gear and bearing interactions in the presence of faults: Part I. The combined gear bearing dynamic model and the simulation of localised bearing faults. Mech. Syst. Signal Process. 2008, 22, 1924–1951. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Zhang, W.; Li, X.; Ding, Q. Deep residual learning-based fault diagnosis method for rotating machinery. ISA Trans. 2019, 95, 295–305. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| 1000 m/s | |
| 100 m/s | |
| 7 × 106 N/m | |
| 15 × 105 N/m |
| Description | Value | ||
|---|---|---|---|
| The resolution of input signals | 1 × 2000 | ||
| The size of the network | Layer name | Output size | Layer |
| Conv1 | 1 × 1000 | 3 × 3, 8 | |
| Conv2 | 1 × 500 | 3 | |
| Conv3 | 1 × 250 | 4 | |
| Conv4 | 1 × 125 | 6 | |
| Conv5 | 1 × 64 | 3 | |
| GAP | 1 × 2 | 128 | |
| Activation function | Sigmoid | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, L.; Pan, Q.; Lv, Y.; Zhao, X. Fault Detection of Bearing by Resnet Classifier with Model-Based Data Augmentation. Machines 2022, 10, 521. https://doi.org/10.3390/machines10070521
Qian L, Pan Q, Lv Y, Zhao X. Fault Detection of Bearing by Resnet Classifier with Model-Based Data Augmentation. Machines. 2022; 10(7):521. https://doi.org/10.3390/machines10070521
Chicago/Turabian StyleQian, Lu, Qing Pan, Yaqiong Lv, and Xingwei Zhao. 2022. "Fault Detection of Bearing by Resnet Classifier with Model-Based Data Augmentation" Machines 10, no. 7: 521. https://doi.org/10.3390/machines10070521
APA StyleQian, L., Pan, Q., Lv, Y., & Zhao, X. (2022). Fault Detection of Bearing by Resnet Classifier with Model-Based Data Augmentation. Machines, 10(7), 521. https://doi.org/10.3390/machines10070521