
A Nonlinear Control of Linear Slider Considering Position Dependence of Interlinkage Flux †



Abstract
:1. Introduction
2. Mathematical Preparation
2.1. Definition of Operator
2.2. Unimodular Operator
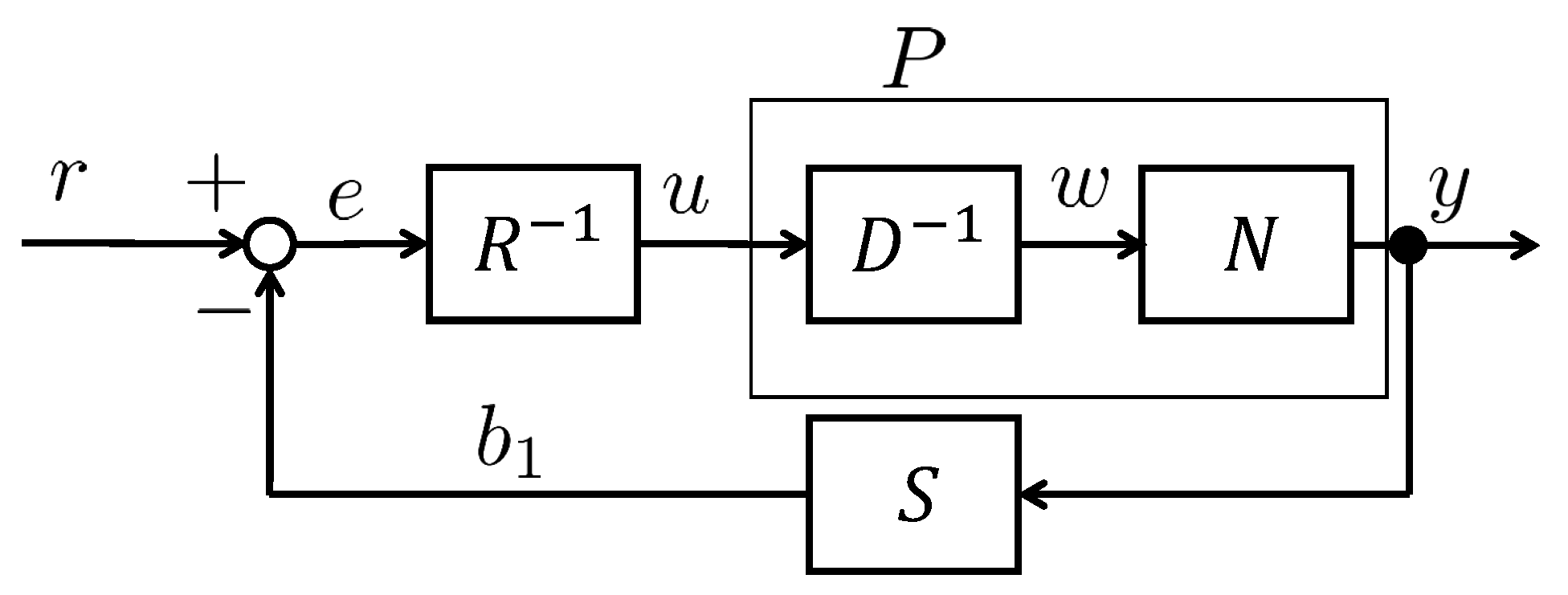
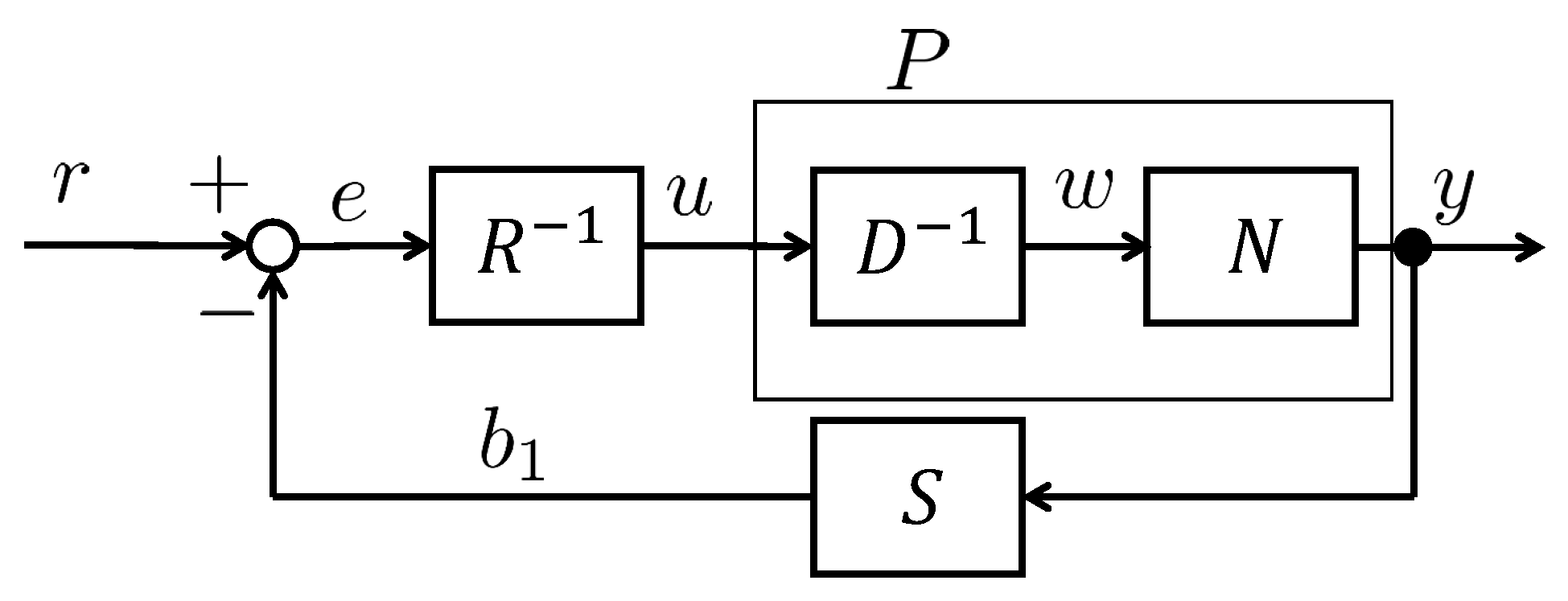
2.3. Operator-Based Feedback Controller
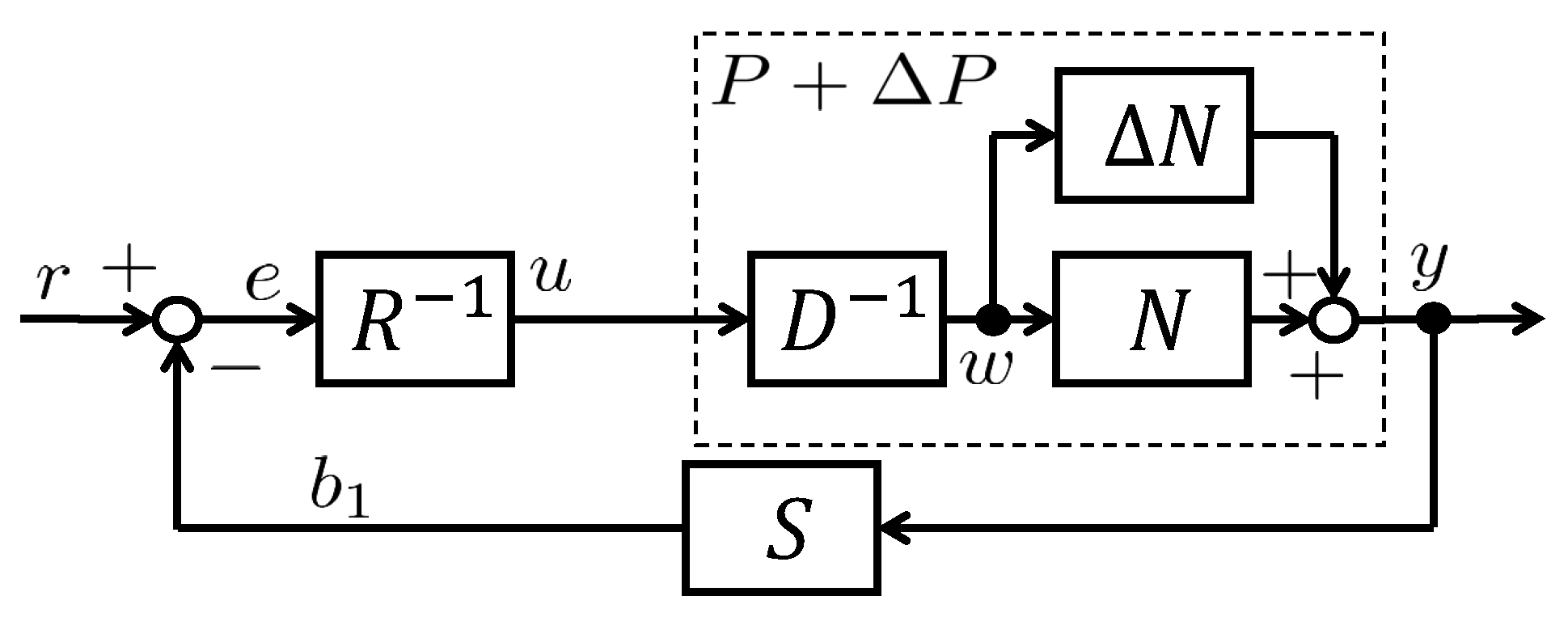
2.4. Ensuring Robust Stability for Uncertainty
2.5. Gradient Descent Method Based Nonlinear Observer
Stabilizing
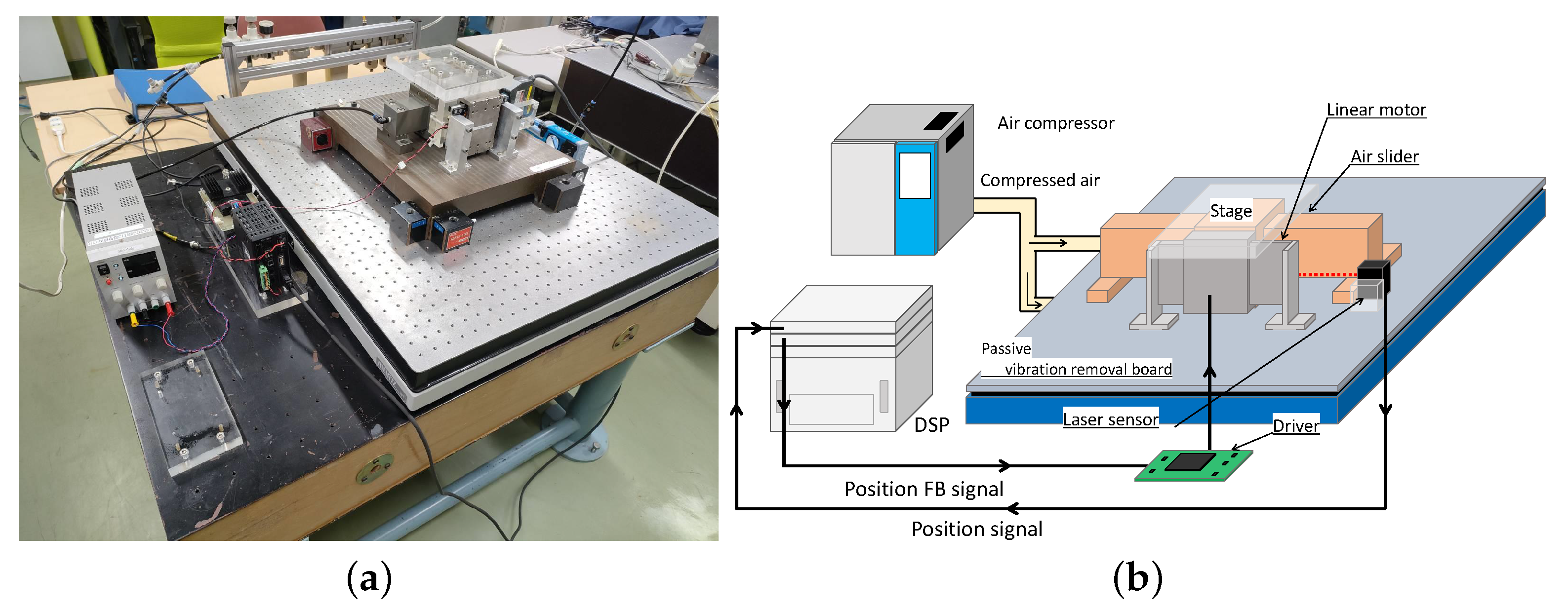
3. Experimental System and Problem Statements
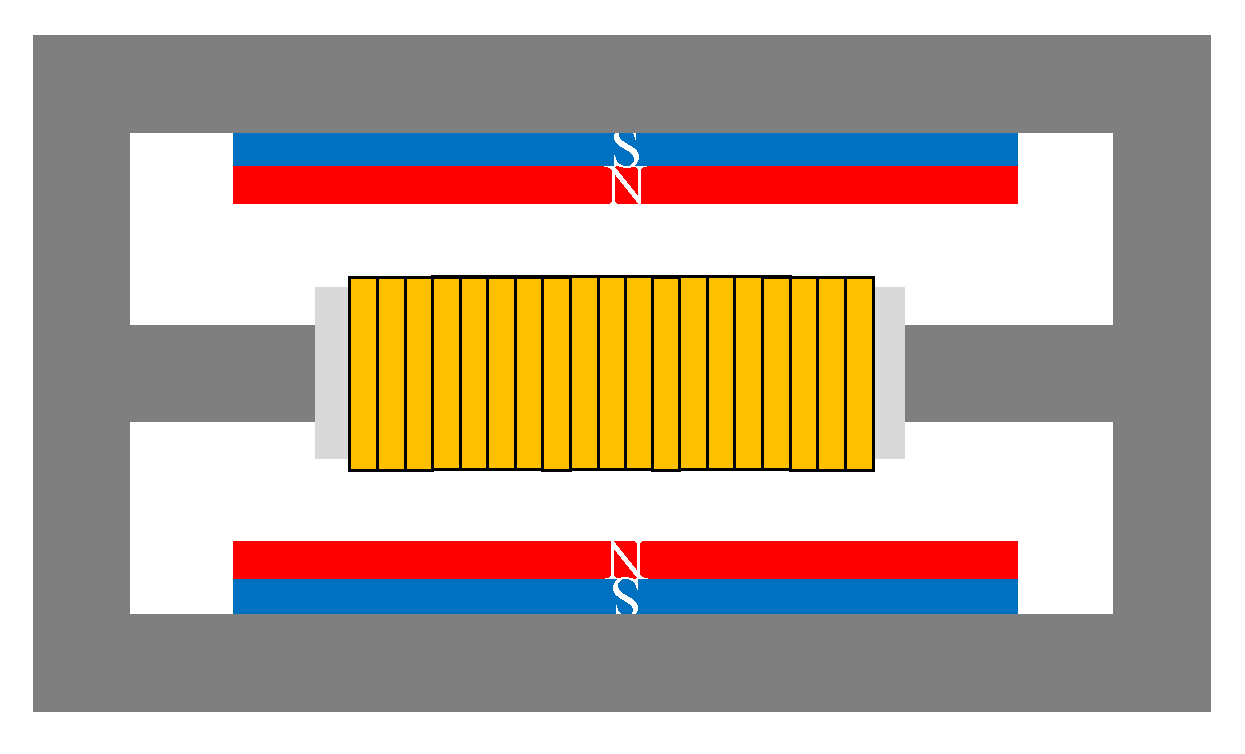
3.1. Voice Coil Motor
3.2. Problem Statement
4. Model of the Plant
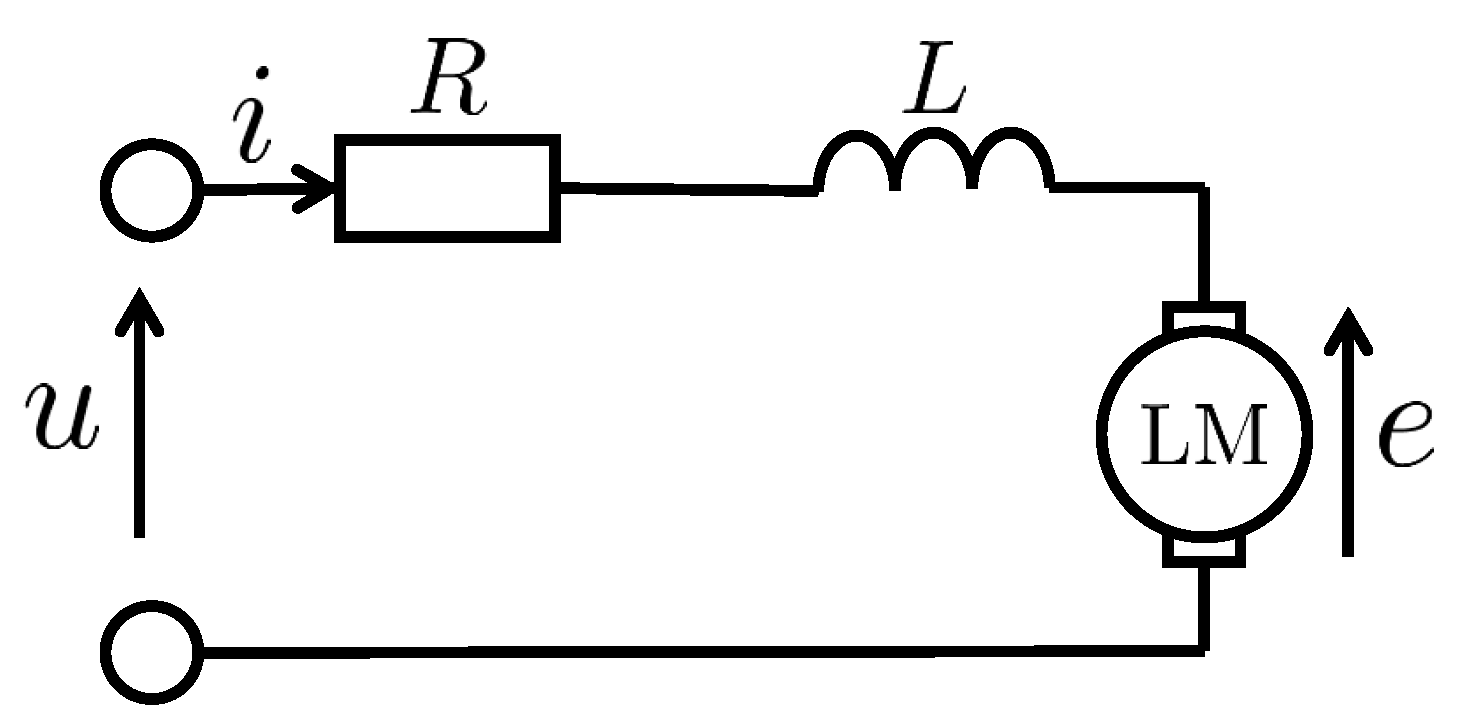
4.1. Linear Model
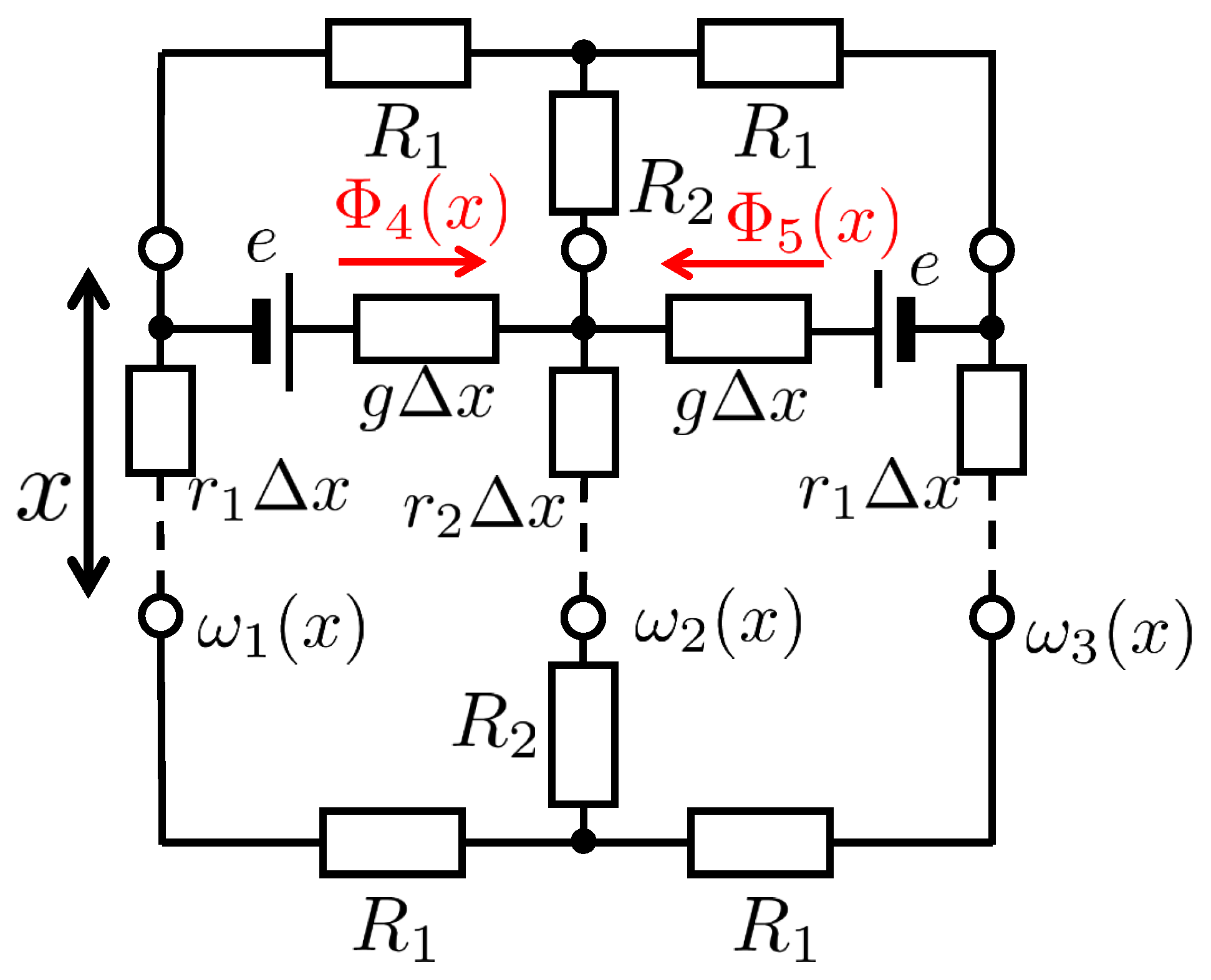
4.2. Position Dependence of Interlinkage Flux
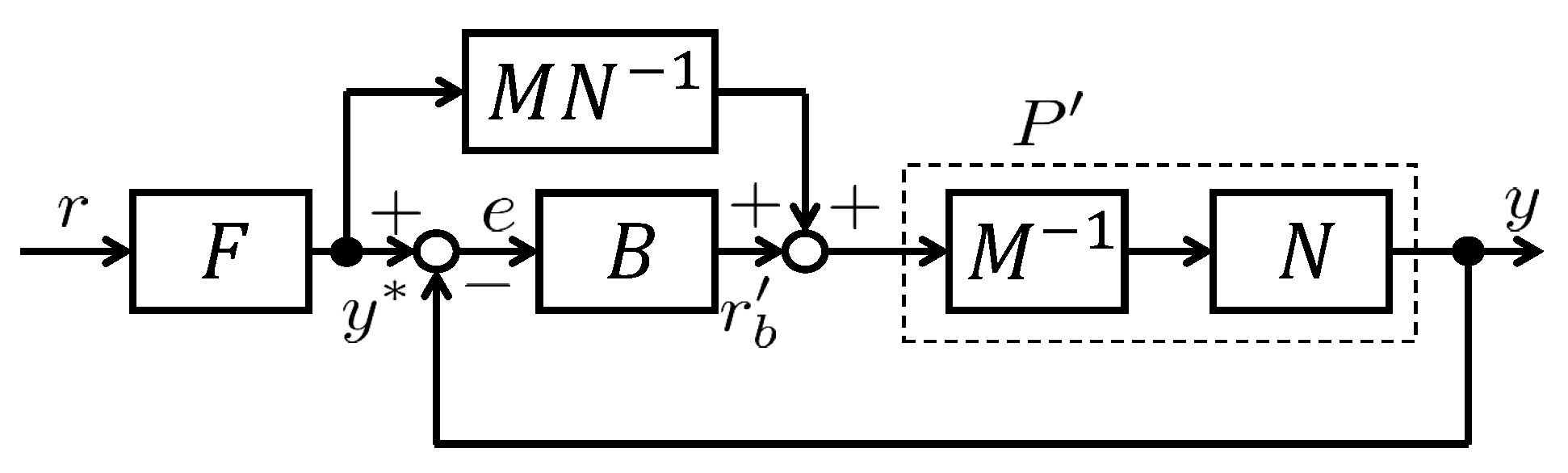
5. Proposed Controller
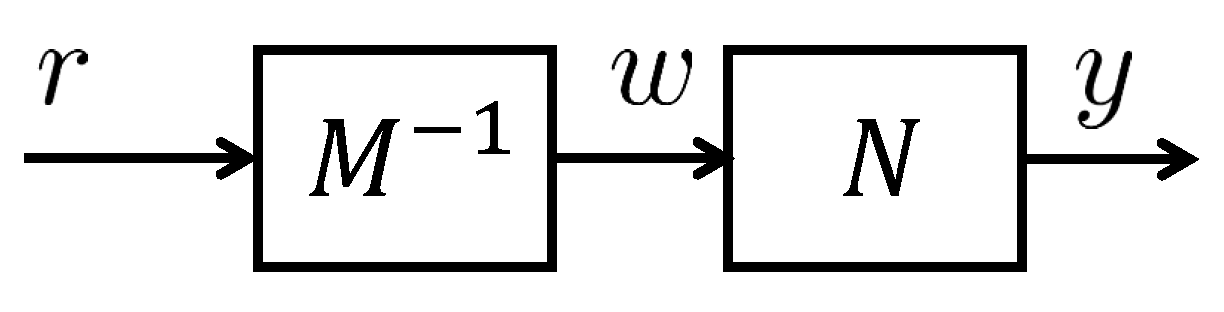
5.1. Operator Expression of Plant
5.2. Compensating Robust Stability with Operator-Based Controller
5.3. Proving the Stability of Control System
5.4. Tracking Controller
Calculating Reference-Following Performance
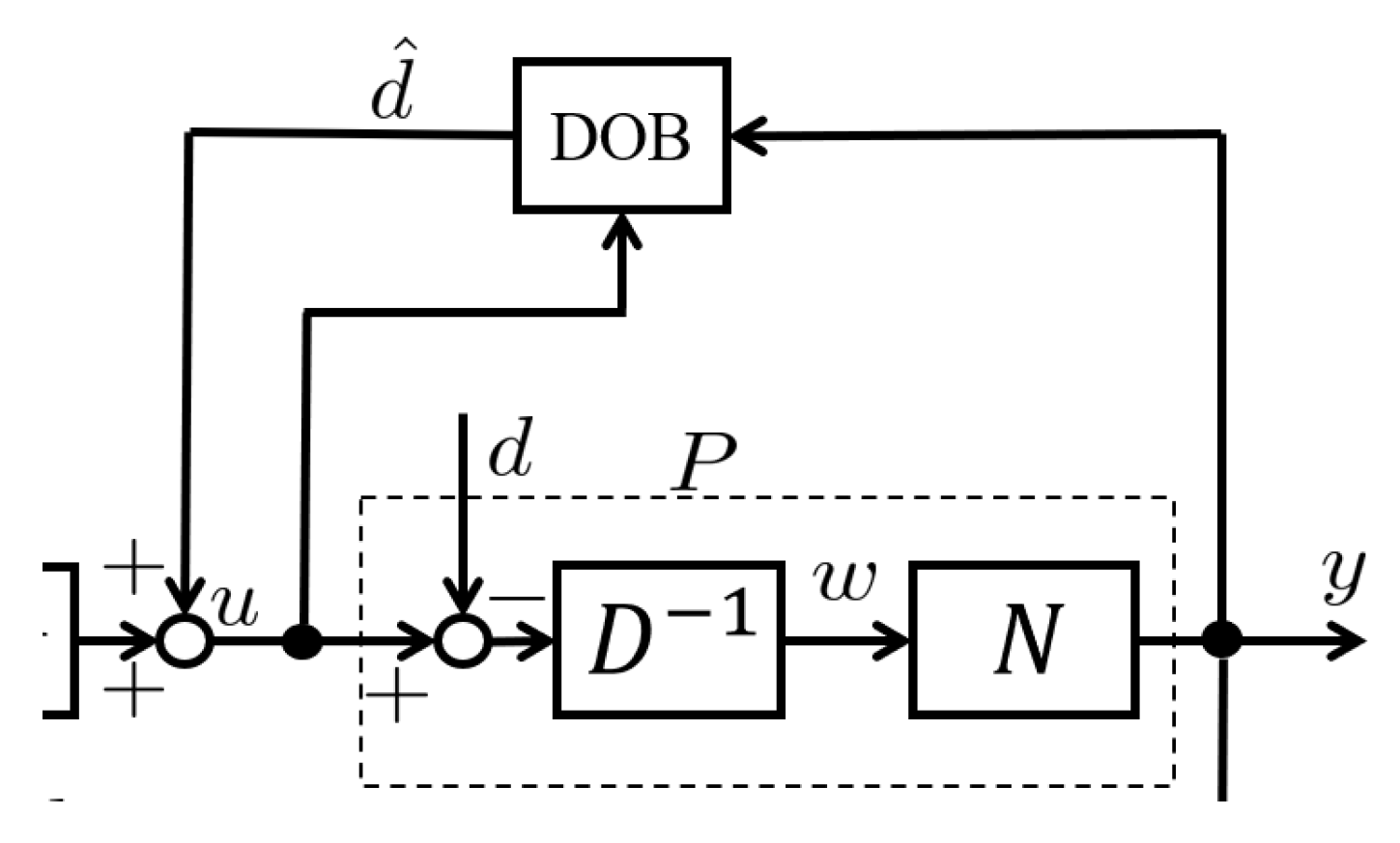
5.5. Compensating Disturbances Response
6. Simulation and Experiment
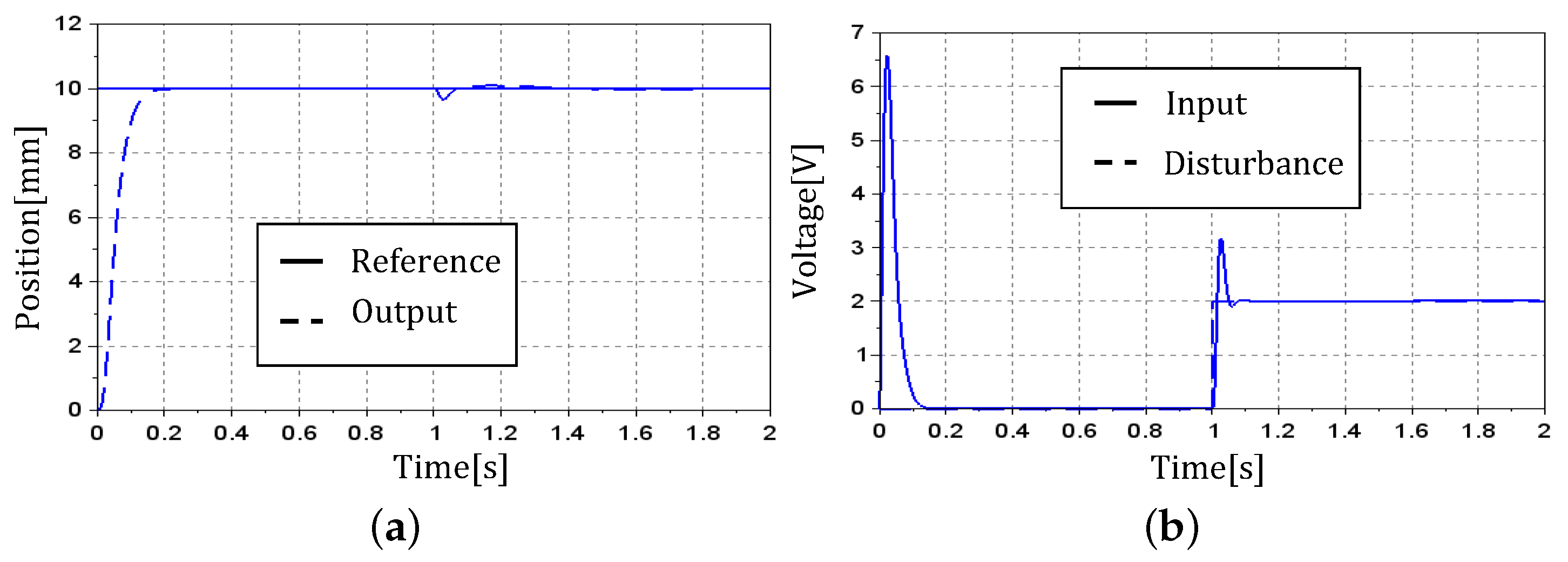
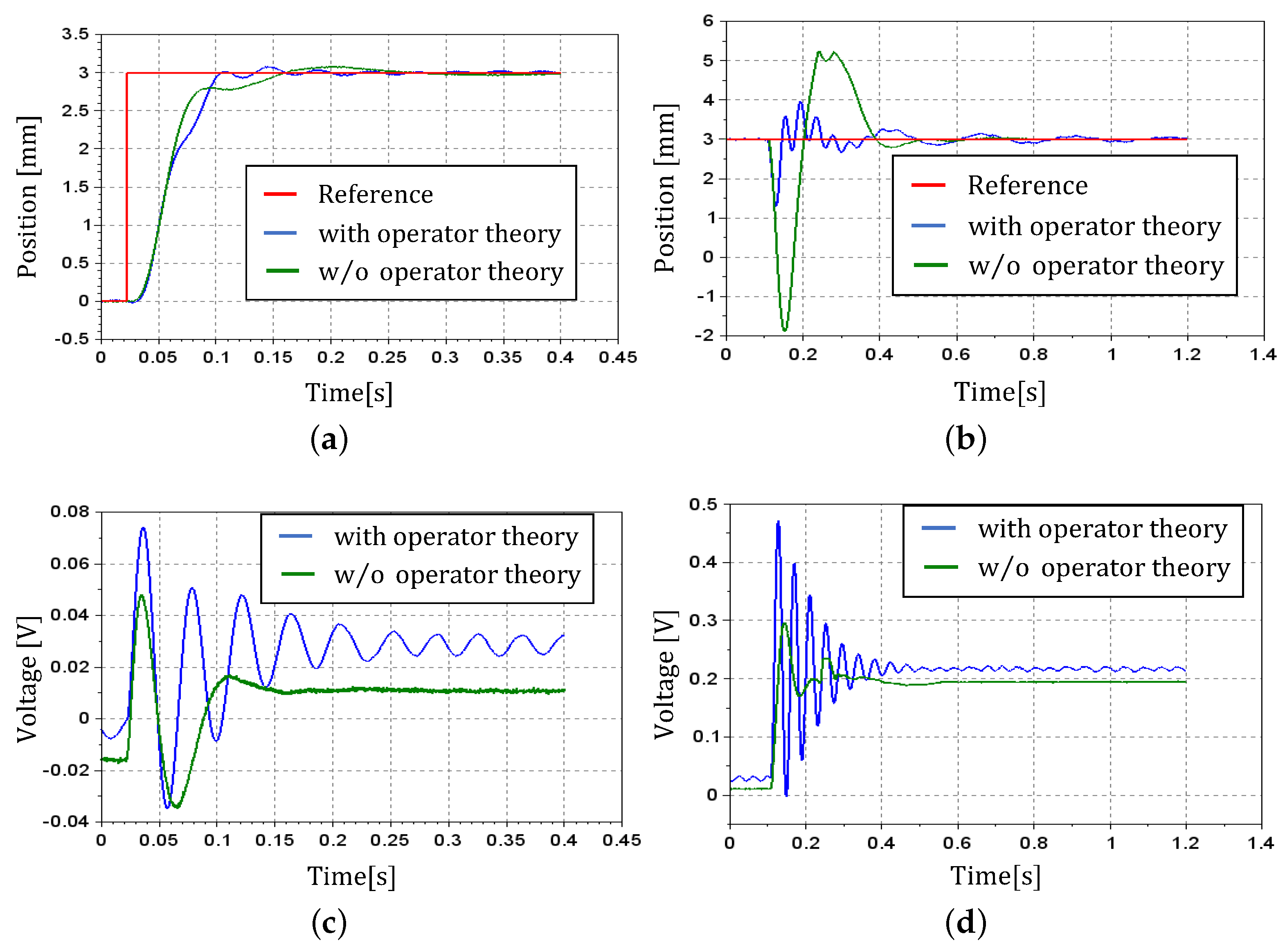
6.1. Simulating Response of Reference and Disturbance
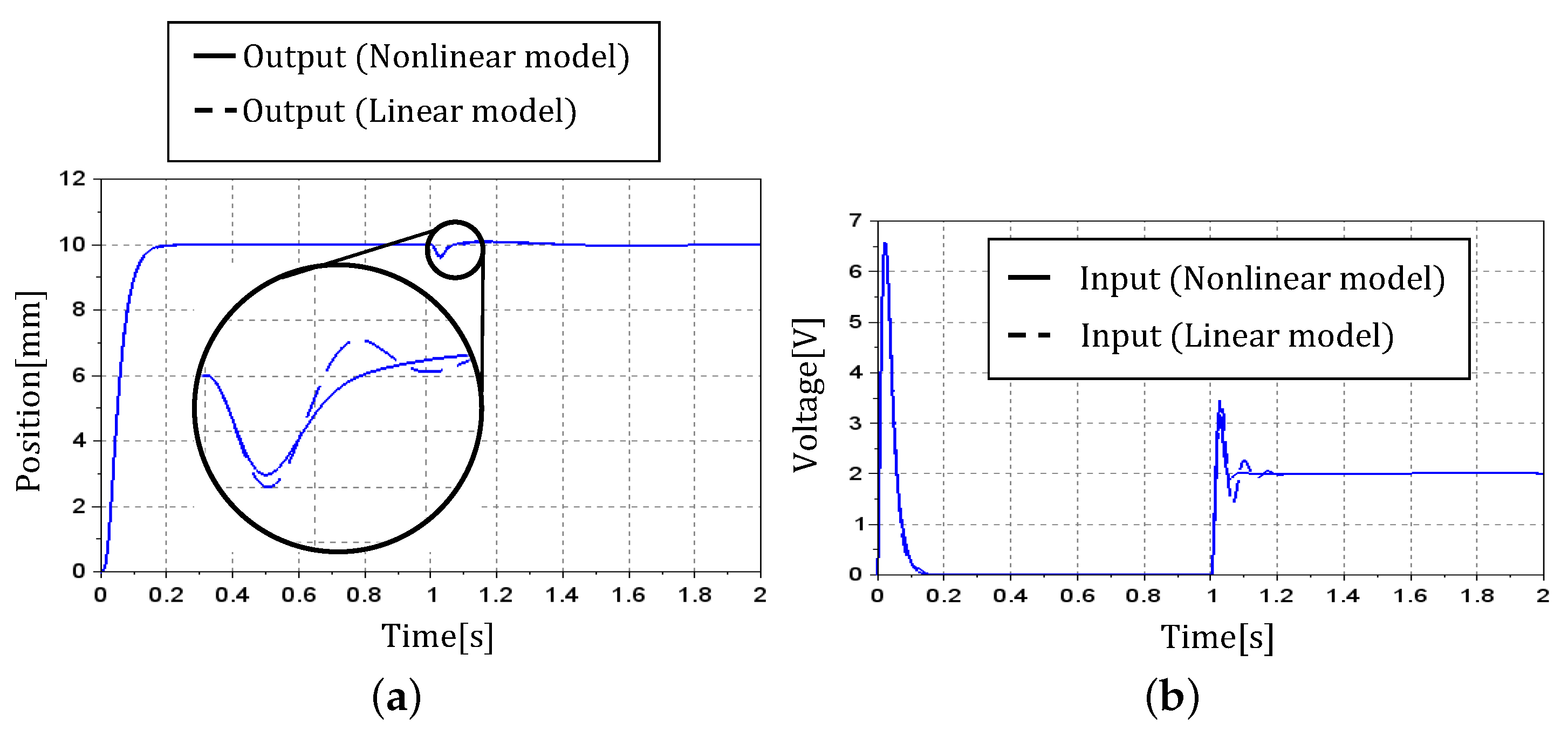
6.2. Comparing with Linear Controller
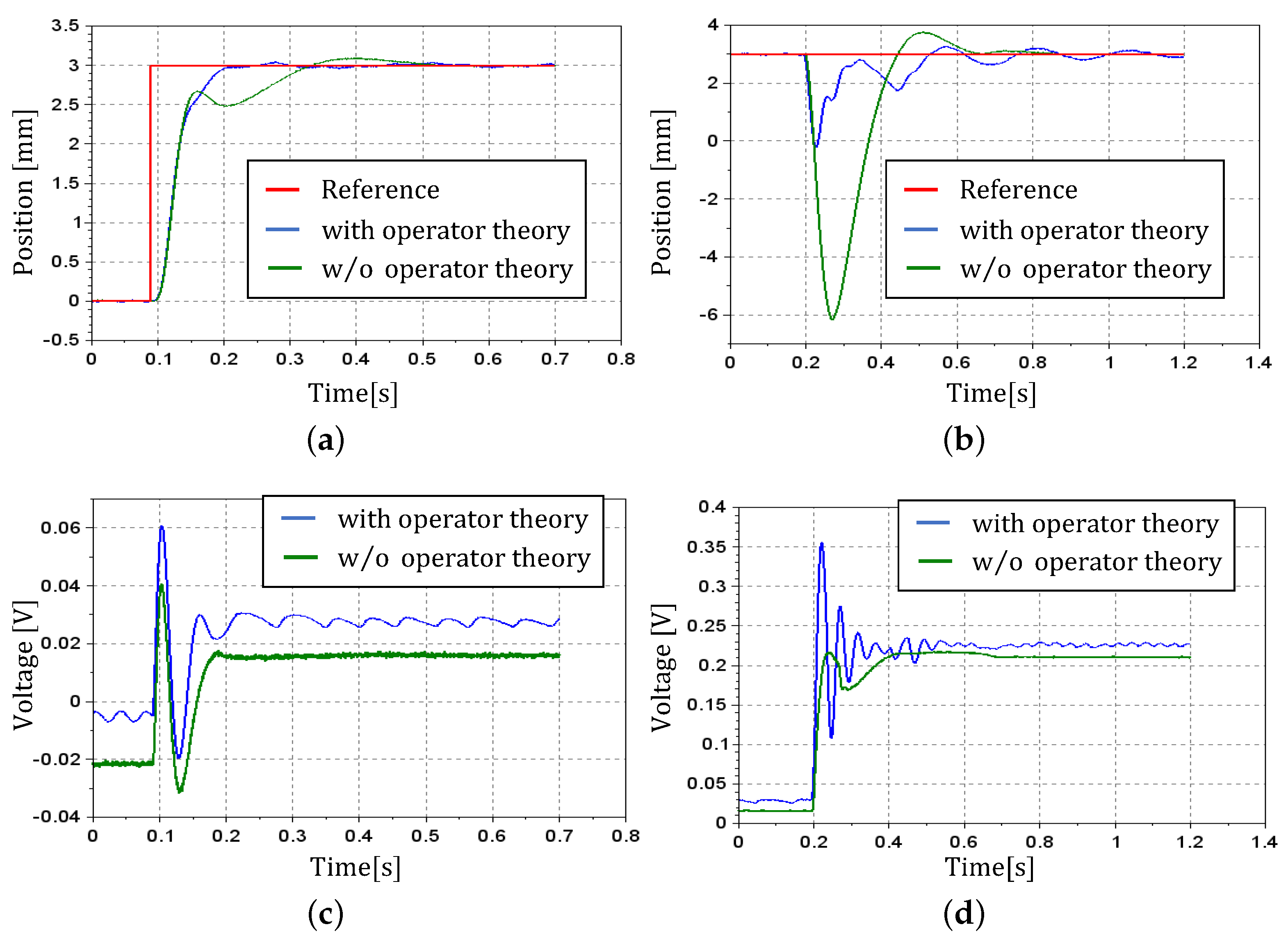
6.3. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miyagawa, H.; Yamamoto, A.; Hamamatsu, H.; Goto, S.; Nakamura, M. The mechanical resonance repression control for high–speed positioning of linear motor by using velocity estimated observer of center of gravity. J. Jpn. Soc. Precis. Eng. 2002, 68, 284–290. [Google Scholar] [CrossRef]
- Takahashi, M.; Ogawa, H.; Kato, T. Development of compact maglev nanometer—Scale positioning stage. Precis. Eng. J. Int. Soc. Precis. Eng. Nanotechnol. 2018, 66, 447–448. [Google Scholar]
- Mitsui, Y.; Ahmed, S. Detent force reduction by positional shifting of permanent magnets for a pmlsm without compromising thrust. IEEE Electron. Express 2021, 18, 1–6. [Google Scholar] [CrossRef]
- Manabe, T.; Wakui, S. Production and application of horizontal jerk sensor. In Proceedings of the 2018 International Conference of Advanced Mechatronic Systems, Zhengzhou, China, 30 August–2 September 2018; pp. 305–310. [Google Scholar]
- Nakamura, Y.; Morimoto, K.; Wakui, S. Position control of linear slider via feedback error learning. In Proceedings of the 2011 Third Pacific–Asia Conference on Circuits, Communications and System (PACCS), Piscataway, NJ, USA, 17–18 July 2011; pp. 1–4. [Google Scholar]
- Shao, K.; Zheng, J.; Wang, H.; Xu, F.; Wang, X.; Liang, B. Recursive sliding mode control with adaptive disturbance observer for a linear motor positioner. Mech. Syst. Signal Process. 2021, 146, 107014. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, H.; Cao, Z.; Zheng, J.; Yu, M.; Yazdani, A.; Shahnia, F. Fast nonsingular terminal sliding mode control for permanent-magnet linear motor via elm. Neural Comput. Applic. 2020, 32, 14447–14457. [Google Scholar] [CrossRef]
- Shirani, H.; Wakui, S. Control of an isolated table’s fluctuation caused by supplied air pressure using a voice coil motor. J. Syst. Des. Dyn. 2010, 4, 406–415. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.H.; Lee, Y.C.; Crang, Y.H. Adaptive controller design for a linear motor control system. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 601–616. [Google Scholar]
- Furukawa, I.; Deng, M. Prescribed performance based nonlinear vibration control of a flexible arm with shape memory alloy actuator. In Proceedings of the 2021 International Conference on Cyber-Physical Social Intelligence, Beijing, China, 18–20 December 2021. [Google Scholar]
- Hoshina, T.; Deng, M. Operator based robust nonlinear position control of linear slider. In Proceedings of the 2021 International Conference on Advanced Mechatronic Systems, Tokyo, Japan, 9–12 December 2021; pp. 1–6. [Google Scholar]
- Jiang, L.; Deng, M.; Inoue, A. Obstacle avoidance and motion control of a two wheeled mobile robot using svr technique. Int. J. Innov. Comput. Inf. Control 2009, 5, 253–262. [Google Scholar]
- Kawamura, S.; Deng, M. Recent developments on modeling for a 3–dof micro–hand based on ai methods. Micromachines 2020, 11, 792. [Google Scholar] [CrossRef] [PubMed]
- Ueno, K.; Kawamura, S.; Deng, M. Operator–based nonlinear control for a miniature flexible actuator using funnel control method. Machines 2021, 9, 26. [Google Scholar] [CrossRef]
- Wen, S.; Deng, M. Operator–based robust nonlinear control and fault detection for a peltier actuated thermal process. Math. Comput. Model. 2013, 57, 16–29. [Google Scholar] [CrossRef]
- Wen, S.; Deng, M.; Inoue, A. Operator–based robust nonlinear control for gantry crane system with soft measurement of swing angle. Int. J. Model. Identif. Control 2012, 16, 86–96. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Ishikawa, K. Operator–based nonlinear feedback control design using robust right coprime factorization. IEEE Trans. Autom. Control 2006, 51, 645–648. [Google Scholar] [CrossRef] [Green Version]
- Deng, M.; Bu, N. Isomorphism–based robust right coprime factorization of nonlinear unstable plants with perturbations. IET Control Theory Appl. 2006, 4, 2381–2390. [Google Scholar] [CrossRef]
- Wang, A.; Deng, M. Robust nonlinear multivariable tracking control design to a manipulator with unknown uncertainties using operator–based robust right coprime factorization. Trans. Inst. Meas. Control 2013, 35, 788–797. [Google Scholar] [CrossRef]
- Shah, S.; Iwai, Z.; Mizumoto, I.; Deng, M. Simple adaptive control of processes with time–delay. J. Process Control 1997, 7, 439–449. [Google Scholar] [CrossRef]
- Deng, M.; Kawashima, T. Adaptive nonlinear sensorless control for an uncertain miniature pneumatic curling rubber actuator using passivity and robust right coprime factorization. IEEE Trans. Control Syst. Technol. 2016, 24, 318–324. [Google Scholar] [CrossRef]
- Takahashi, K.; Deng, M. Nonlinear sensorless cooling control for a peltier actuated aluminum plate thermal system. In Proceedings of the 2013 International Conference on Advanced Mechatronic Systems, Luoyang, China, 25–27 September 2013; pp. 1–6. [Google Scholar]
- Deng, M.; Wen, S.; Inoue, A. Operator–based robust nonlinear control for a peltier actuated process. Meas. Control J. Inst. Meas. Control 2011, 44, 116–120. [Google Scholar] [CrossRef]
- Sato, H.; Wakui, S. Implementation of disturbance observer without differentiator and suppression of high frequency vibration, international conference on mechanical. In Proceedings of the International Conference on Mechanical, Electrical and Medical Intelligent System 2019, IPS–04–05, Xi’an China, 25–27 October 2019. [Google Scholar]
- Sato, H.; Wakui, S. Adjustment and implementation of a disturbance observer without differentiator. In Proceedings of the 2018 International Conference on Advanced Mechatronic Systems, Zhengzhou, China, 30 August–2 September 2018; pp. 311–315. [Google Scholar]
- Shimizu, K. Nonlinear state observers by gradient descent method. In Proceedings of the 2000 IEEE International Conference on Control Applications, Anchorage, AK, USA, 27 September 2000; pp. 616–622. [Google Scholar]
- Naiborhu, J.; Shimizu, K. Direct gradient descent control for global stabilization of general nonlinear control systems. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2000, 83, 516–523. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| p | Stage position | m | Mass of stage |
| v | Stage velocity | c | Dumping constant of stage |
| i | Armature current | k | Spring constant of stage |
| R | Armature resistance | Flux interlinking armature | |
| L | Armature inductance |
| Symbol | Value | Unit | Symbol | Value | Unit |
|---|---|---|---|---|---|
| m | |||||
| c | 50 | ||||
| k | 400 | ||||
| R | 5000 | ||||
| L | 100 | ||||
| l | |||||
| 100 |
| Symbol | Value | Unit | Symbol | Value | Unit |
|---|---|---|---|---|---|
| m | 0.0045 | kg | 0.005 | s | |
| c | 0.0205 | kg/s | p* | 100 | /s |
| k | 3.08 | 10 | |||
| R | 200 | ||||
| L | |||||
| l | |||||
| 100 |
| Conditions: | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Overshoot () | 0.0765 | 0.0749 | 0.0386 | 0.872 |
| Settling time () | 0.1293 | 0.1986 | 0.1057 | 0.3577 |
| Conditions: | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Overshoot () | 1.70 | 4.90 | 3.22 | 9.16 |
| Settling time () | 0.9480 | 0.3857 | 1.008 | 0.6114 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoshina, T.; Deng, M. A Nonlinear Control of Linear Slider Considering Position Dependence of Interlinkage Flux. Machines 2022, 10, 522. https://doi.org/10.3390/machines10070522
Hoshina T, Deng M. A Nonlinear Control of Linear Slider Considering Position Dependence of Interlinkage Flux. Machines. 2022; 10(7):522. https://doi.org/10.3390/machines10070522
Chicago/Turabian StyleHoshina, Tomoya, and Mingcong Deng. 2022. "A Nonlinear Control of Linear Slider Considering Position Dependence of Interlinkage Flux" Machines 10, no. 7: 522. https://doi.org/10.3390/machines10070522
APA StyleHoshina, T., & Deng, M. (2022). A Nonlinear Control of Linear Slider Considering Position Dependence of Interlinkage Flux. Machines, 10(7), 522. https://doi.org/10.3390/machines10070522