
Design and Hydrodynamic Experiment Research on Novel Biomimetic Pectoral Fins of a Ray-Inspired Robotic Fish


Abstract
:1. Introduction
- (I)
- 2-Dimensional fins with flexible skeleton or smart actuator;
- (II)
- 3-Dimensional fins with flexible skeleton and permeable skin;
- (III)
- 3-Dimensional fins with rigid skeleton and flexible silicon body.
2. Materials and Methods
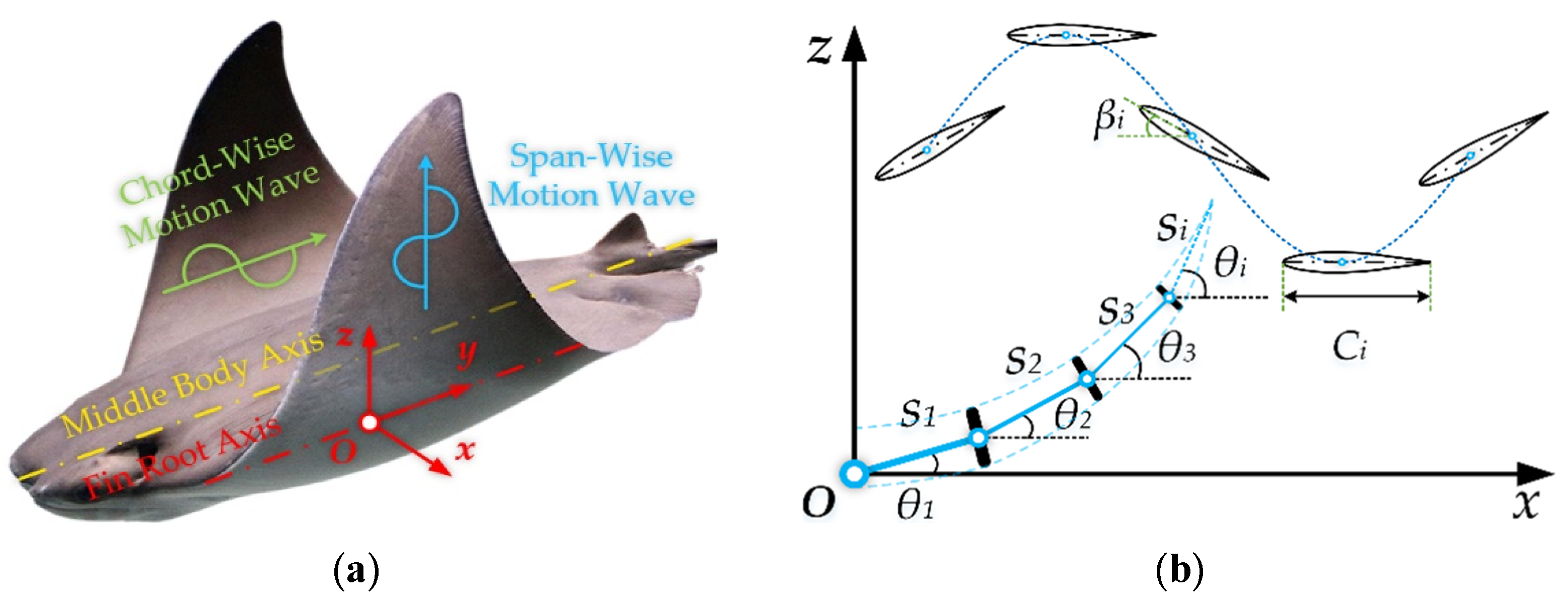
2.1. Kinematic Model of the Pectoral Fin
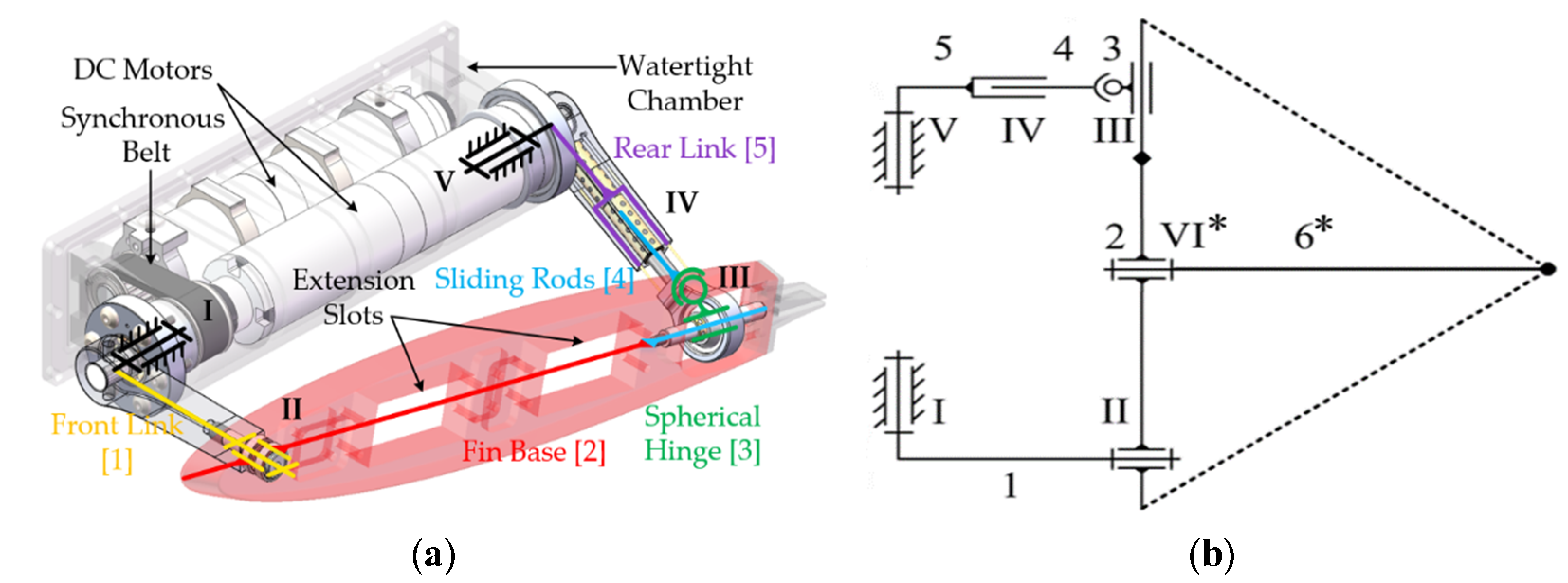
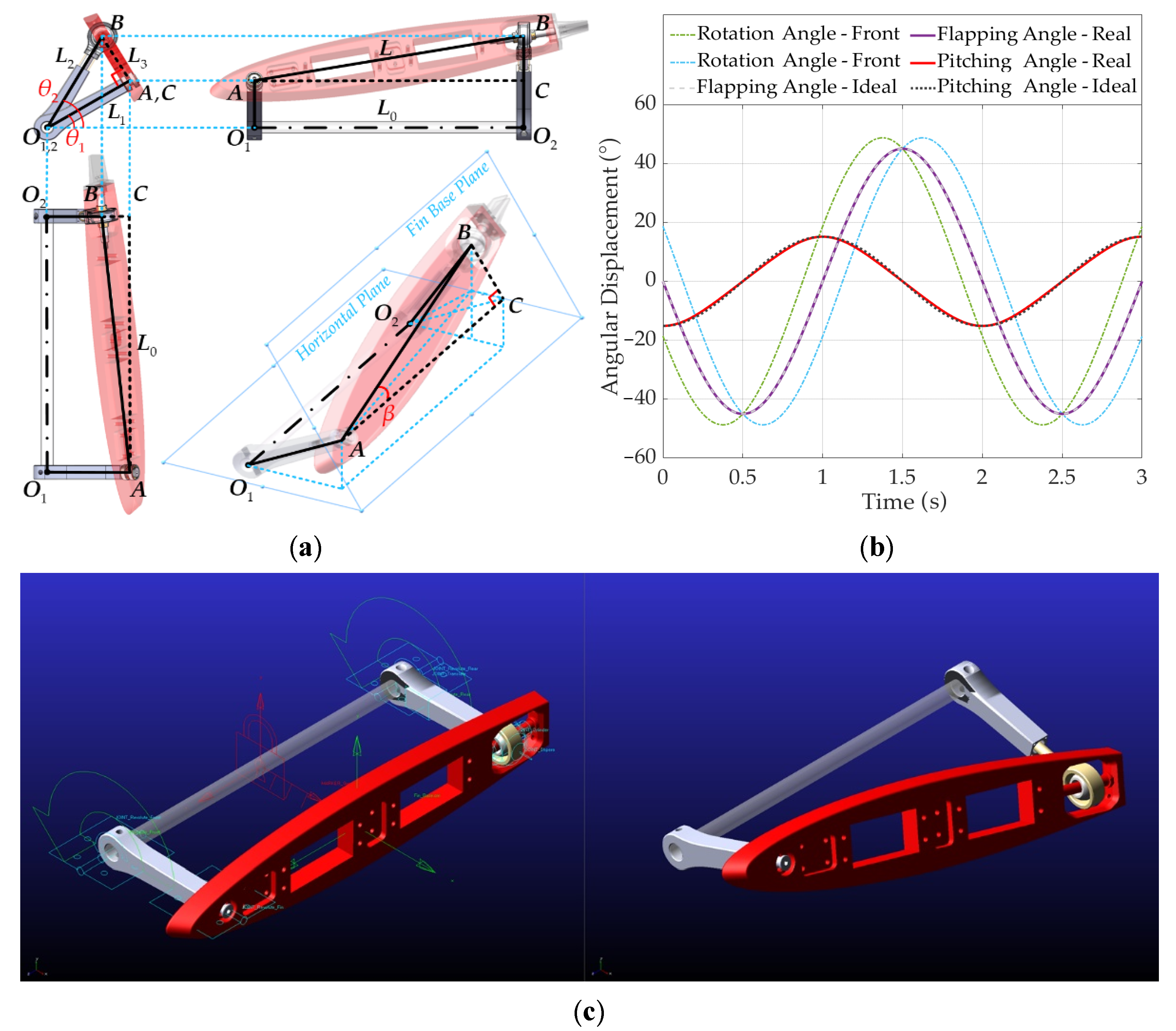
2.2. Design and Analysis of the Bionic Propelling Mechanism
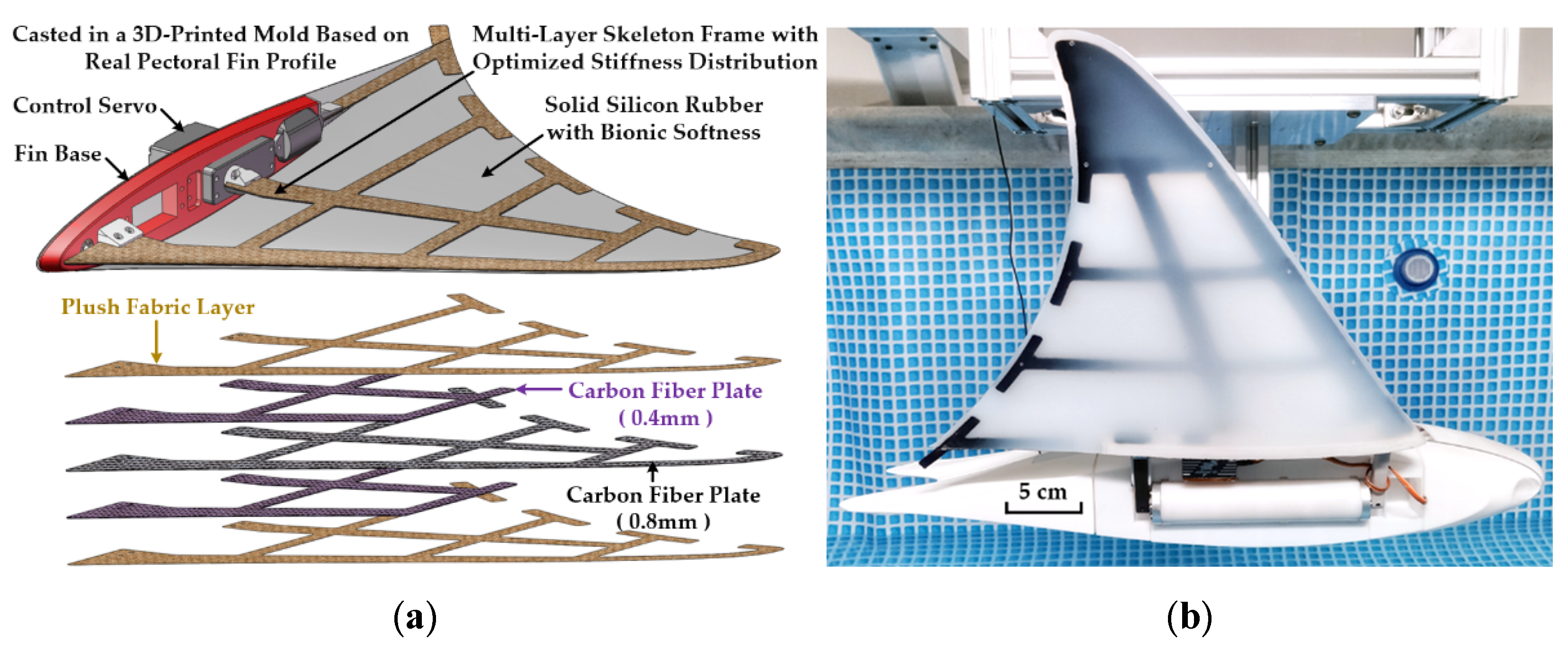
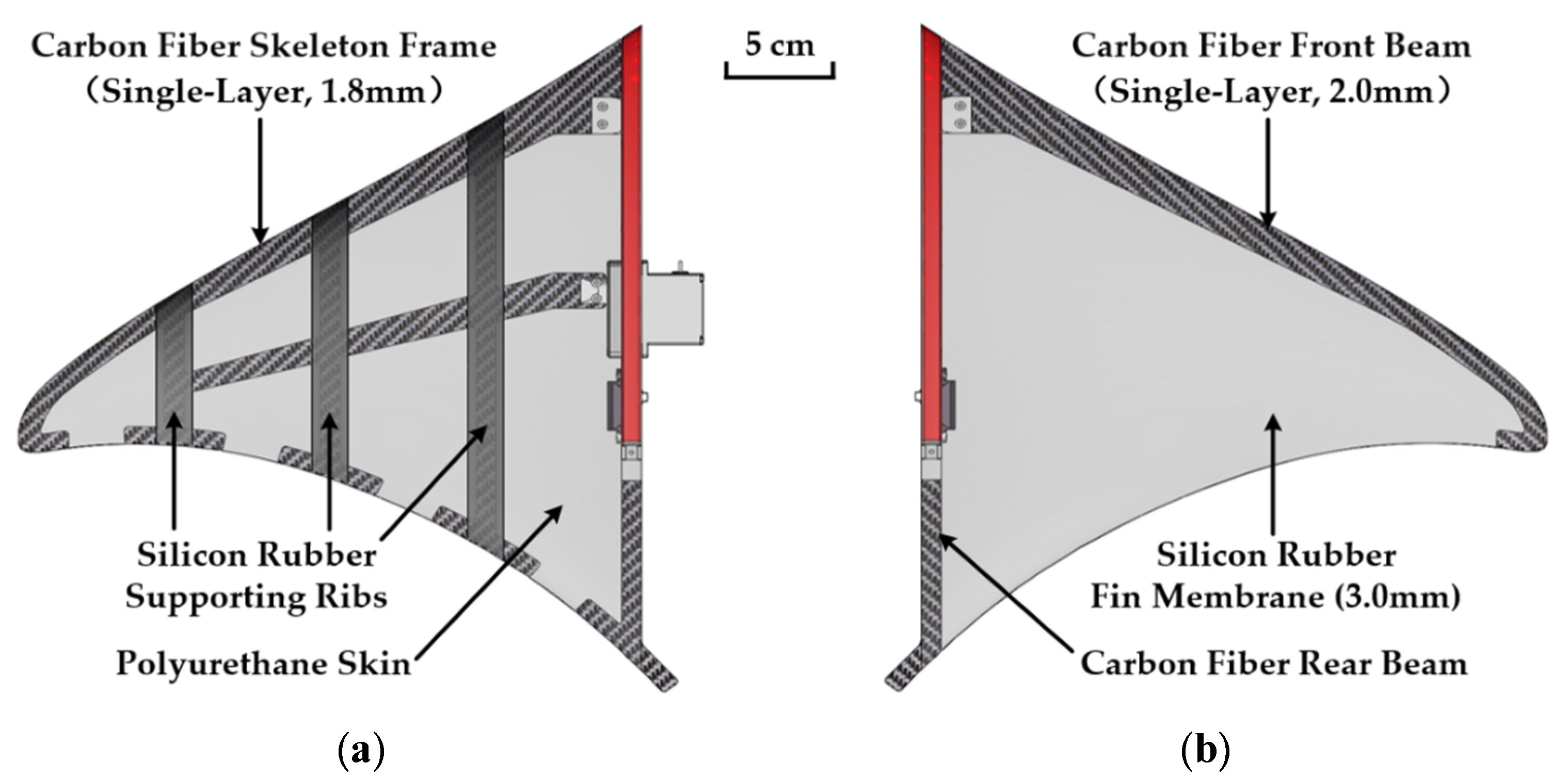
2.3. Design and Fabrication of the Bionic Pectoral Fins
3. Experiment Platform and Settings
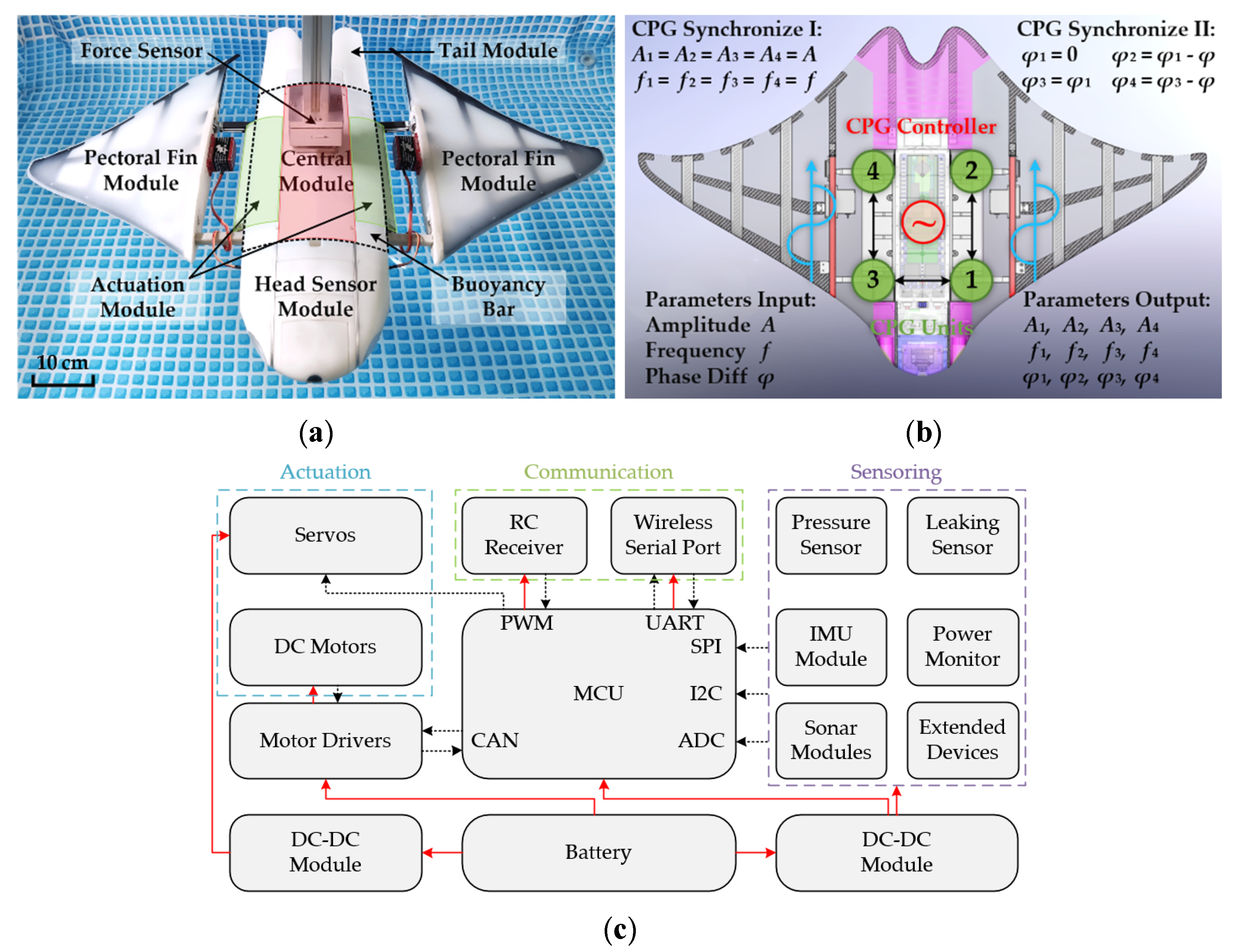
3.1. The Robotic Fish Platform
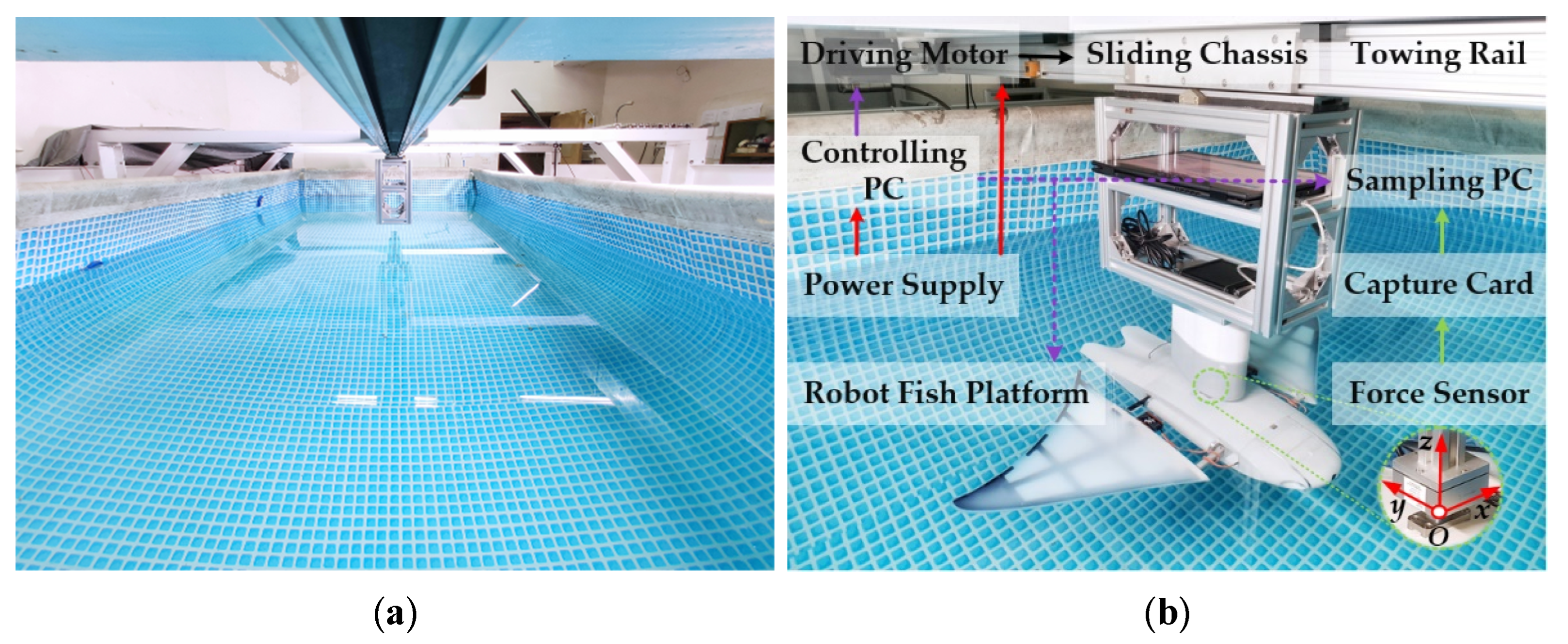
3.2. Experimental Environment and Equipment Setup
4. Results and Discussion
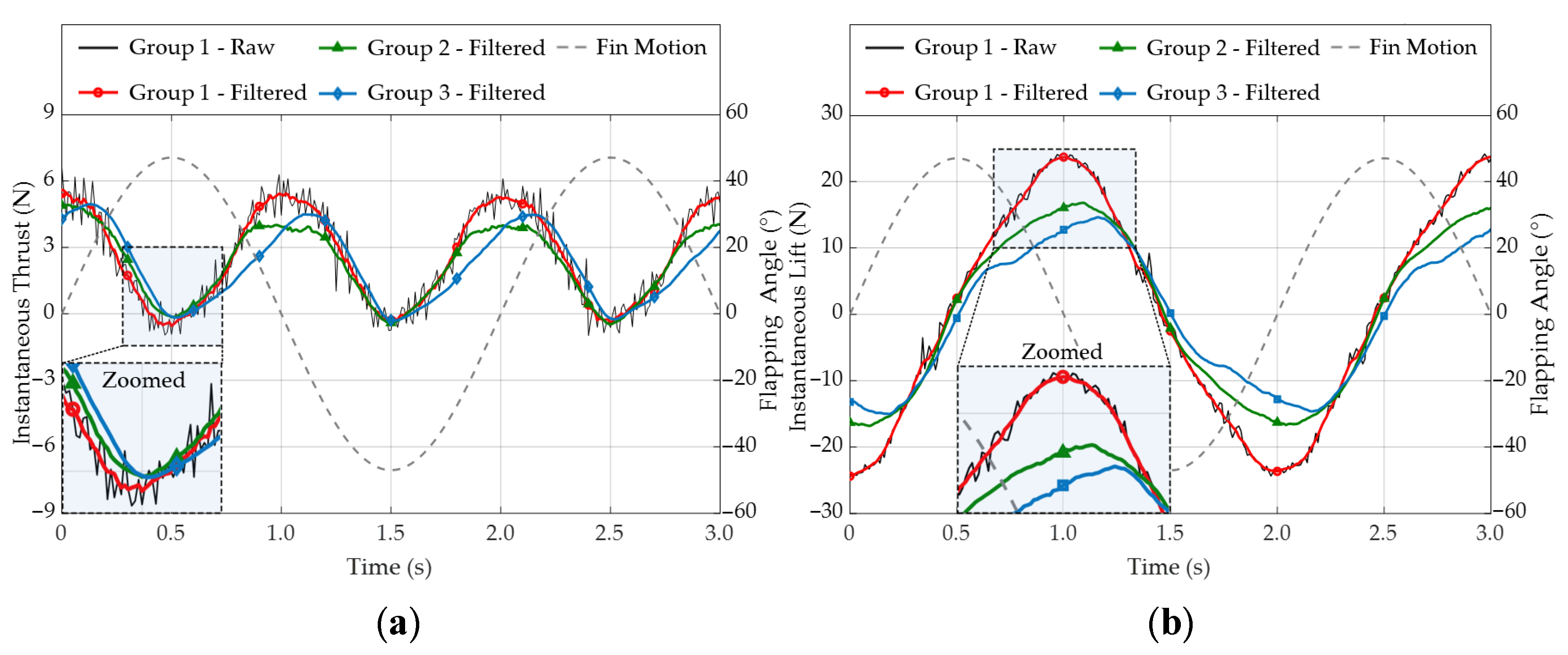
4.1. Instantaneous Thrust and Lift Force
4.2. Average Thrust and Propulsion Performance
5. Conclusions and Future Work
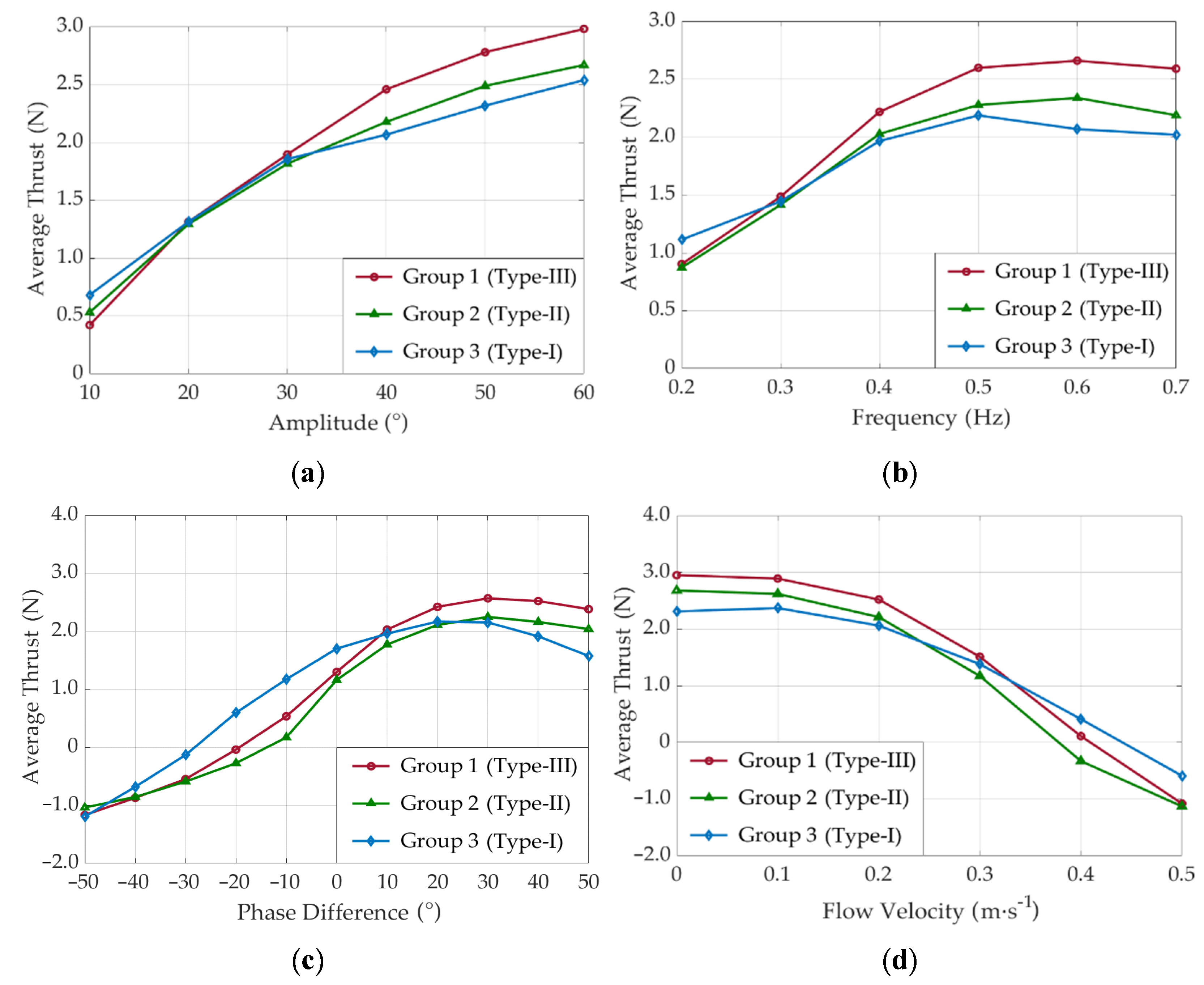
- The average thrust grew constantly with the increased flapping amplitude and dropped continuously with the increased flow velocity, while there were optimal value ranges of frequency and phase difference to achieve maximum average thrust;
- The 3D-profiled fins had advantages over the 2D ones in an amplitude range of 40°~60° at a regular frequency of 0.5 Hz, while the 2D-membrane fins were more suitable for medium to high-speed cruising scenarios with relatively smaller phase difference and lower frequency;
- The alterable phase difference and pitching angle achieved by the novel propelling mechanism offered both the 3D and the 2D fins an increased thrust generation as well as proactive direction control of the motion waves, especially for the 3D ones;
- Fin modules of Group 1 outperformed those of Group 2 in most of the cases while their thrust features (curve trends) were quite similar, indicating that the newly proposed bionic soft fins would be an upgraded substitute for the traditional skin-structured fins.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, M.-F.R.; Chen, Y.-C. An Innovative Pose Control Mechanism for a Small Rudderless Underwater Vehicle. Machines 2022, 10, 352. [Google Scholar] [CrossRef]
- Yu, D.; Zhu, C.; Zhang, M.; Liu, X. Experimental Study on Multi-Domain Fault Features of AUV with Weak Thruster Fault. Machines 2022, 10, 236. [Google Scholar] [CrossRef]
- Sharma, S.D.; Mani, K.; Arakeri, V.H. Cavitation noise studies on marine propellers. J. Sound Vib. 1990, 138, 255–283. [Google Scholar] [CrossRef]
- Bandyopadhyay, P.R. Trends in biorobotic autonomous undersea vehicles. IEEE J. Ocean. Eng. 2005, 30, 109–139. [Google Scholar] [CrossRef]
- Song, Z.; Fu, Z.; Romano, D.; Dario, P.; Kang, R. A Novel Fish-Inspired Robot with a Double-Cam Mechanism. Machines 2022, 10, 190. [Google Scholar] [CrossRef]
- Xing, H.; Guo, S.; Shi, L.; Hou, X.; Liu, Y.; Liu, H.; Hu, Y.; Xia, D.; Li, Z. A novel small-scale turtle-inspired amphibious spherical robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1702–1707. [Google Scholar]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef] [Green Version]
- Lindsey, C.C. Form, Function, and Locomotory Habits in Fish. Fish Biol. 1978, 7, 1–100. [Google Scholar] [CrossRef]
- Yu, J.Z.; Chen, E.K.; WANG, S.; Tan, M. Research evolution and analysis of biomimetic robot fish. Control Theory Appl. 2003, 20, 485–491. [Google Scholar]
- Ozmen Koca, G.; Bal, C.; Korkmaz, D.; Bingol, M.C.; Ay, M.; Akpolat, Z.H.; Yetkin, S. Three-dimensional modeling of a robotic fish based on real carp locomotion. Appl. Sci. 2018, 8, 180. [Google Scholar] [CrossRef] [Green Version]
- Ay, M.; Korkmaz, D.; Ozmen Koca, G.; Bal, C.; Akpolat, Z.H.; Bingol, M.C. Mechatronic design and manufacturing of the intelligent robotic fish for bio-inspired swimming modes. Electronics 2018, 7, 118. [Google Scholar] [CrossRef] [Green Version]
- Blake, R.W. Fish functional design and swimming performance. J. Fish Biol. 2004, 65, 1193–1222. [Google Scholar] [CrossRef]
- Triantafyllou, M.S.; Hover, F.S.; Techet, A.H.; Yue, D.K.P. Review of hydrodynamic scaling laws in aquatic locomotion and fishlike swimming. Appl. Mech. Rev. 2005, 58, 226–237. [Google Scholar] [CrossRef] [Green Version]
- Arauz, R.; Chávez, E.J.; Hoyos-Padilla, E.M.; Marshall, A.D. First record of the reef manta ray, Mobula alfredi, from the eastern Pacific. Mar. Biodivers. Rec. 2019, 12, 3. [Google Scholar] [CrossRef]
- Fish, F.E.; Schreiber, C.M.; Moored, K.W.; Liu, G.; Dong, H.; Bart-Smith, H. Hydrodynamic performance of aquatic flapping: Efficiency of underwater flight in the manta. Aerospace 2016, 3, 20. [Google Scholar] [CrossRef] [Green Version]
- Rosenberger, L.J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. J. Exp. Biol 2001, 204, 379–394. [Google Scholar] [CrossRef] [PubMed]
- Schaefer, J.T.; Summers, A.P. Batoid wing skeletal structure: Novel morphologies, mechanical implications, and phylogenetic patterns. J. Morphol. 2005, 264, 298–313. [Google Scholar] [CrossRef]
- Meng, Y.; Wu, Z.; Dong, H.; Wang, J.; Yu, J. Toward a novel robotic manta with unique pectoral fins. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1663–1673. [Google Scholar] [CrossRef]
- Zhou, C.; Low, K.H. Design and locomotion control of a biomimetic underwater vehicle with fin propulsion. IEEE/ASME Trans. Mechatron. 2011, 17, 25–35. [Google Scholar] [CrossRef]
- Cai, Y.; Bi, S.; Zhang, L. Design and implication of a bionic pectoral fin imitating cow-nosed ray. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 3525–3529. [Google Scholar]
- Chew, C.M.; Lim, Q.Y.; Yeo, K.S. Development of propulsion mechanism for Robot Manta Ray. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics, Zhuhai, China, 6–9 December 2015; pp. 1918–1923. [Google Scholar]
- Wang, Z.; Hang, G.; Li, J. Shape memory alloy wire actuated flexible biomimetic fin for quiet underwater propulsion. J. Mech. Eng. 2009, 45, 126–131. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef]
- Festo Aqua_Ray. Available online: https://www.festo.com.cn/cn/zh/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2006-to-2009/aqua-ray-id_33860/ (accessed on 14 February 2022).
- Cai, Y.; Bi, S.; Low, K.H.; Zhang, L.; Zong, G. Posture analysis and application of a bionic pectoral foil. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 1783–1788. [Google Scholar]
- Ma, H.; Cai, Y.; Wang, Y.; Bi, S.; Gong, Z. A biomimetic cownose ray robot fish with oscillating and chordwise twisting flexible pectoral fins. Ind. Robot. Int. J 2015, 42, 214–221. [Google Scholar] [CrossRef]
- Xing, C.; Cao, Y.; Cao, Y.; Pan, G.; Huang, Q. Asymmetrical Oscillating Morphology Hydrodynamic Performance of a Novel Bionic Pectoral Fin. J. Mar. Sci. Eng. 2022, 10, 289. [Google Scholar] [CrossRef]
- Cai, Y.; Bi, S.; Zheng, L. Design and experiments of a robotic fish imitating cow-nosed ray. J. Bionic Eng. 2010, 7, 120–126. [Google Scholar] [CrossRef]
- Cai, Y.; Chen, L.; Bi, S.; Li, G.; Zhang, H. Bionic Flapping Pectoral Fin with Controllable Spatial Deformation. J. Bionic Eng. 2019, 16, 916–930. [Google Scholar] [CrossRef]
- Fish, F.E.; Dong, H.; Zhu, J.J.; Bart-Smith, H. Kinematics and hydrodynamics of mobuliform swimming: Oscillatory winged propulsion by large pelagic batoids. Mar. Technol. Soc. J. 2017, 51, 35–47. [Google Scholar] [CrossRef]
- Russo, R.S.; Blemker, S.S.; Fish, F.E.; Bart-Smith, H. Biomechanical model of batoid (skates and rays) pectoral fins predicts the influence of skeletal structure on fin kinematics: Implications for bio-inspired design. Bioinspir. Biomim. 2015, 10, 046002. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y. Applying CPG to Study Manta Robofish. Ph.D. Thesis, School of Mechanical Engineering and Automation, Beihang University, Beijing, China, 2015. [Google Scholar]
- Chen, L.; Bi, S.; Cai, Y.; Cao, Y.; Pan, G. Design and Experimental Research on a Bionic Robot Fish with Tri-Dimensional Soft Pectoral Fins Inspired by Cownose Ray. J. Mar. Sci. Eng. 2022, 10, 537. [Google Scholar] [CrossRef]
- Michelin, S.; Llewellyn Smith, S.G. Resonance and propulsion performance of a heaving flexible wing. Phys. Fluids 2009, 21, 071902. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform Diameter | Platform Weight | ||
|---|---|---|---|
| L560 mm × W890 mm × H110 mm | 6.2 kg (Fin Type-I), 8.0 kg (Fin Type-II & III) | ||
| Motion Parameter | Notation | Unit | Value Range |
| Amplitude | A | Degree (°) | 10~60, step 10 |
| Frequency | f | Hz | 0.2~0.7, step 0.1 |
| Phase Difference | φ | Degree (°) | −50~50, step 10 |
| Flow Velocity (Towing Speed) | V | m/s | 0~0.5, step 0.1 |
| Group Number | Fin Structure Type | Features of the Structure |
|---|---|---|
| Group 1 | Type-III (Upgraded) | 3D Profile, Solid Structure, Bionic Softness |
| Group 2 | Type-II (Traditional) | 3D Profile, Hollow Structure, Flexible Skin |
| Group 3 | Type-I (Traditional) | 2D Profile, Soft Membrane, Rigid Leading Edge |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Bi, S.; Cai, Y.; Qiu, H. Design and Hydrodynamic Experiment Research on Novel Biomimetic Pectoral Fins of a Ray-Inspired Robotic Fish. Machines 2022, 10, 606. https://doi.org/10.3390/machines10080606
Chen L, Bi S, Cai Y, Qiu H. Design and Hydrodynamic Experiment Research on Novel Biomimetic Pectoral Fins of a Ray-Inspired Robotic Fish. Machines. 2022; 10(8):606. https://doi.org/10.3390/machines10080606
Chicago/Turabian StyleChen, Lingkun, Shusheng Bi, Yueri Cai, and Hongcheng Qiu. 2022. "Design and Hydrodynamic Experiment Research on Novel Biomimetic Pectoral Fins of a Ray-Inspired Robotic Fish" Machines 10, no. 8: 606. https://doi.org/10.3390/machines10080606
APA StyleChen, L., Bi, S., Cai, Y., & Qiu, H. (2022). Design and Hydrodynamic Experiment Research on Novel Biomimetic Pectoral Fins of a Ray-Inspired Robotic Fish. Machines, 10(8), 606. https://doi.org/10.3390/machines10080606