
Review on Torque Distribution Scheme of Four-Wheel In-Wheel Motor Electric Vehicle


Abstract
:1. Introduction
2. The Driving Form of the Motor Vehicle
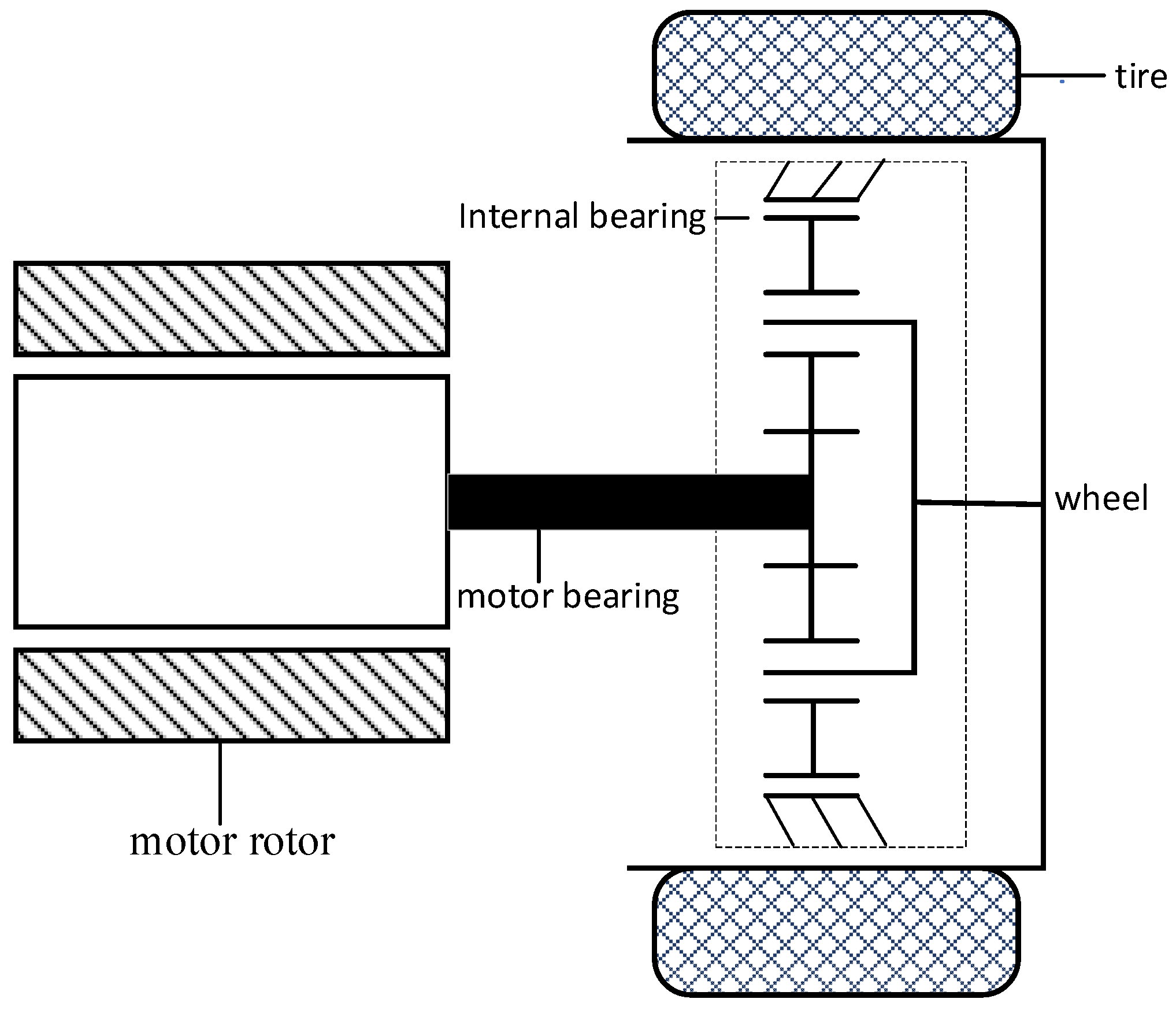
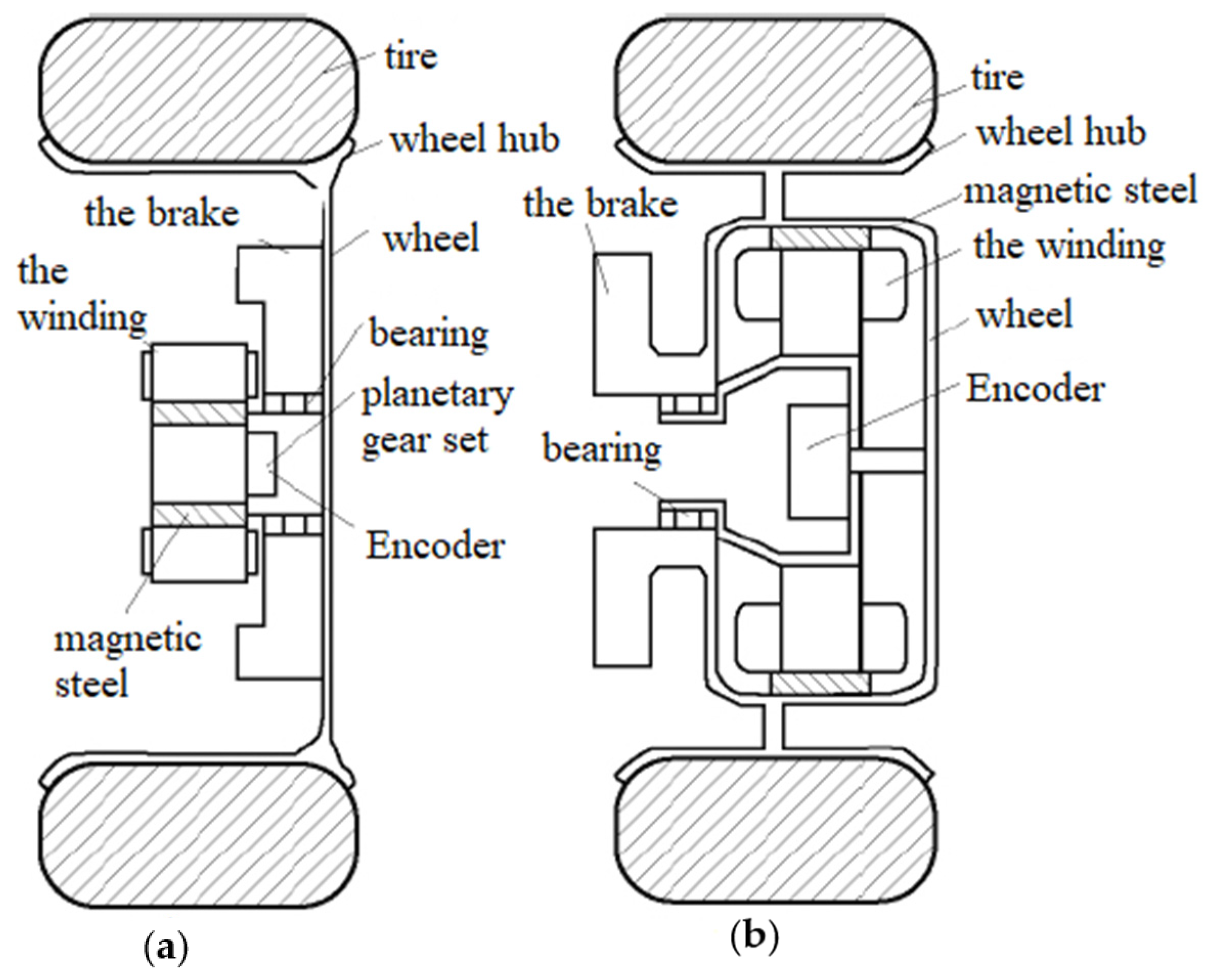
2.1. Wheel Side Motor Drive
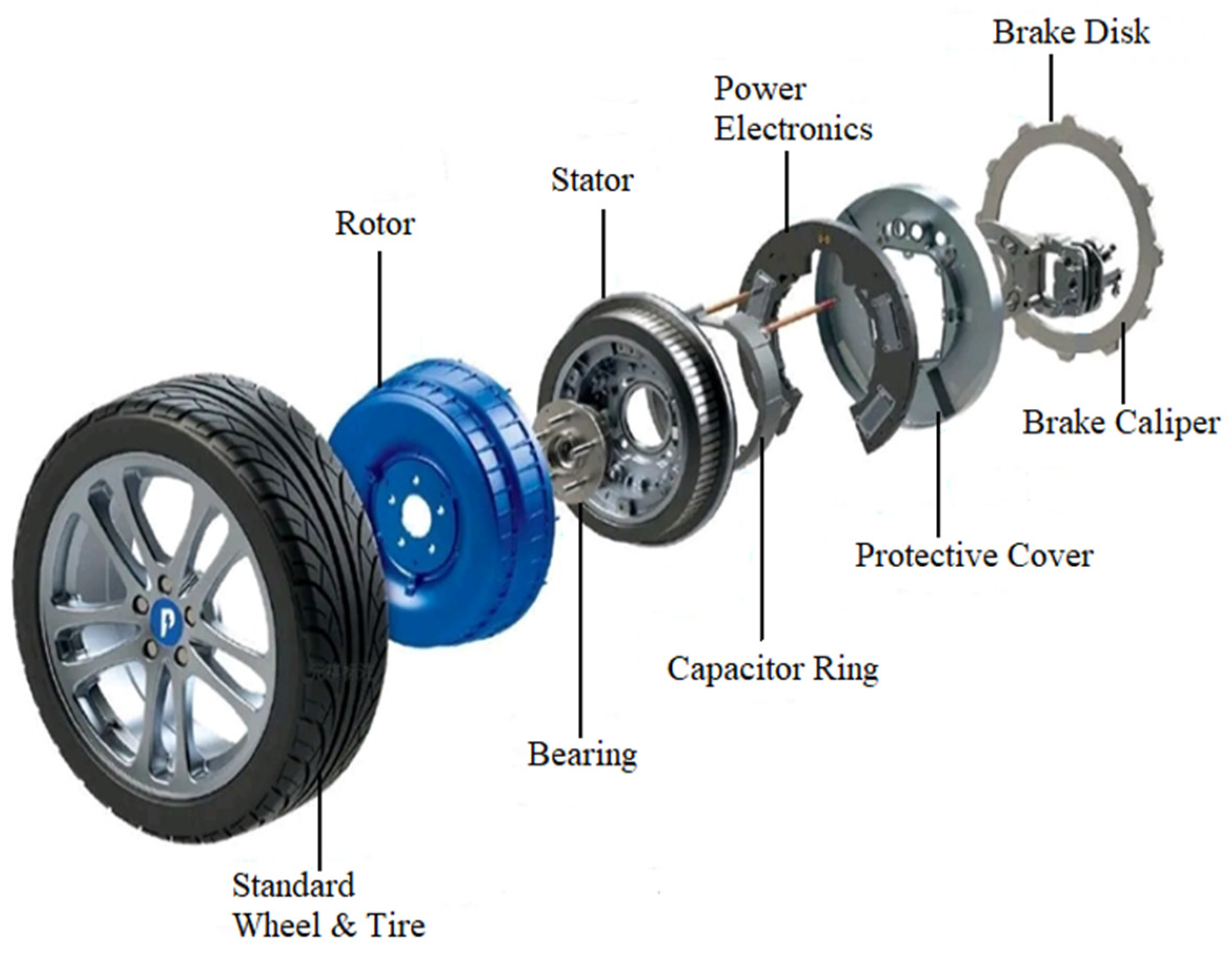
2.2. In-Wheel Motor Drive
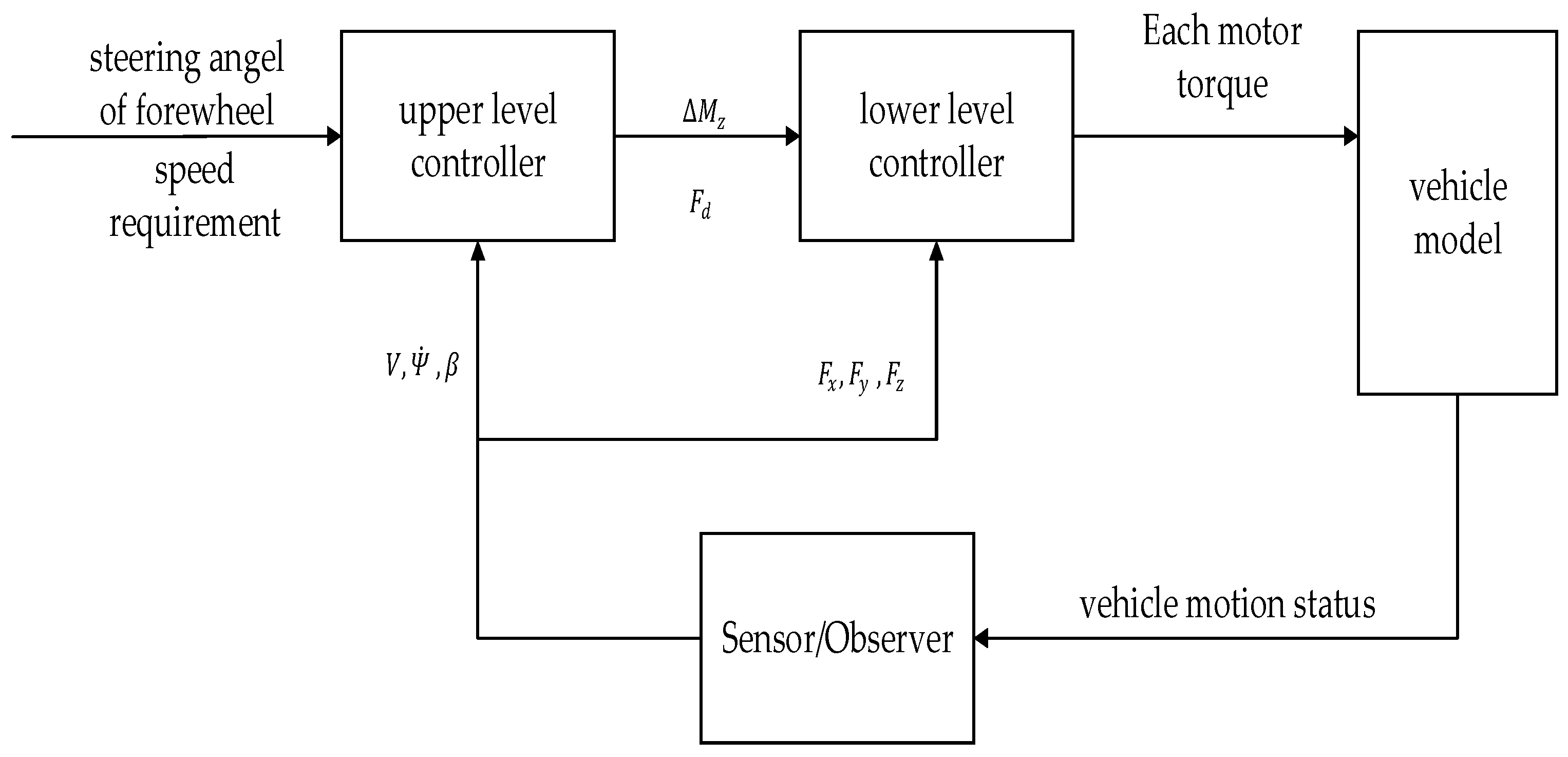
3. In-Wheel Motor Drive Torque Distribution Scheme
3.1. In-Wheel Motor Drive Torque Distribution Method
3.1.1. In-Wheel Motor Drive Torque Distribution Method to Improve Stability
- (1)
- In-wheel motor drive torque distribution method based on vehicle dynamics model to improve stability.
- a.
- Torque distribution considering road adhesion
- b.
- Torque distribution considering tire force factors
- c.
- Torque distribution considering driver factors
- (2)
- In-wheel motor drive torque distribution method based on algorithm to improve stability.
- a.
- Calculate the torque allocation of the optimal yaw moment algorithm
- b.
- Torque distribution of quadratic programming algorithms
3.1.2. In-Wheel Motor Drive Torque Distribution Method to Improve Energy Efficiency
- (1)
- In-wheel motor drive torque distribution method based on vehicle dynamics model to improve energy efficiency.
- a.
- Torque distribution considering motor energy efficiency optimization
- b.
- Torque distribution considering tire slip energy loss
- (2)
- In-wheel motor drive torque distribution method based on algorithm to improve energy efficiency.
- a.
- Torque Distribution of Multi-motor Cooperative Control Algorithm
- b.
- Torque Distribution for Global Optimization Algorithms
3.1.3. In-Wheel Motor Drive Torque Distribution Method Considering Both Stability and Energy Efficiency
3.1.4. Other Distribution Methods of In-Wheel Motor Driving Torque
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lovatt, H.C.; Ramsden, V.S.; Mecrow, B.C. Design of an in-wheel motor for a solar-powered electric vehicle. J. IEE Proc. Electr. Power Appl. 1998, 145, 402–408. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, G.H.; Zhao, W.X. Overview of Multi-motor Independent Drive of Electric Vehicles. Int. J. Automot. Technol. 2015, 10, 1–6. [Google Scholar]
- Yu, Z.P.; Yang, P.F.; Xiong, L. Application of Control Allocation in Distributed Drive Electric Vehicle. J. Mech. Eng. 2014, 50, 99–107. [Google Scholar] [CrossRef]
- Heinzl, P.; Lugner, P.; Plochl, M. Stability control of a passenger car by com-bined additional steering and unilateral braking. J. Veh. Syst. Dyn. 2002, 37, 221–233. [Google Scholar] [CrossRef]
- Cong, G.; Mostefai, L.; Denai, M.; Hori, Y. Direct Yaw-moment Control of an In-Wheel-Motored Electric Vehicle Based on Body Slip Angle Fuzzy Observer. J. IEEE Trans. Ind. Electron. 2009, 56, 1411–1419. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.R.; Zhang, H.; Wang, J. Linear Parameter-Varying Controller Design for Four Wheel Independently-Actuated Electric Ground Vehicles with Active Steering Systems. J. IEEE Trans. Control Syst. Technol. 2014, 22, 1281–1296. [Google Scholar]
- Song, J. Active front wheel steering model and controller for integrated dynamics control systems. Int. J. Automot. Technol. 2016, 17, 265–272. [Google Scholar] [CrossRef]
- Veysi, M.; Aghaei, J.; Shasadeghi, M.; Razzaghi, R.; Bahrani, B.; Ryan, D.J. Energy-efficient speed control of electric vehicles: Linear matrix inequality approach. J. IEEE Trans. Veh. Technol. 2020, 69, 10469–10483. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, W.; Zhang, Z.; Qin, Q. A drive system global control strategy for electric vehicle based on optimized acceleration curve. Energy 2022, 248, 123598. [Google Scholar] [CrossRef]
- Benhammou, A.; Tedjini, H.; Guettaf, Y.; Soumeur, M.A.; Hartani, M.A.; Hafsi, O.; Benabdelkader, A. Exploitation of vehicle’s kinetic energy in power management of two-wheel drive electric vehicles based on ANFIS DTC-SVM comparative study. Int. J. Hydrog. Energy 2021, 46, 27758–27769. [Google Scholar] [CrossRef]
- Won, J.S.; Langari, R. Fuzzy torque distribution control for a parallel hybrid vehicle. J. Expert Syst. 2002, 19, 4–10. [Google Scholar] [CrossRef]
- Murata, S. Innovation by in-wheel-motor drive unit. Veh. Syst. Dyn. 2012, 50, 807–830. [Google Scholar] [CrossRef]
- Caricchi, F.; Crescimbini, F.; Mezzetti, F.; Santini, E. Multistage axial-flux PM machine for wheel direct drive. IEEE Trans. Ind. Appl. 1996, 32, 882–888. [Google Scholar] [CrossRef]
- Huang, C.X. Research on Lateral Stability and Torque Distribution Control of an In-Wheel-Motored Electric Vehicle. Doctoral Dissertation, Hunan University, Hunan, China, 2019. [Google Scholar]
- Zhao, M.H. Research on Driving Force Distribution of 4WID-EV Based on Composite Sliding Ratio Control. Doctoral Dissertation, Yanshan University, Hebei, China, 2014. [Google Scholar]
- Xiao, F. Study on State Estimation and Direct Yaw Moment Control for In-Wheel Motor Electric Vehicles. Doctoral Dissertation, Jilin University, Jinlin, China, 2016. [Google Scholar]
- Johansen, T.A.; Fossen, T.I. Control allocation—A survey. Automatica 2013, 49, 1087–1103. [Google Scholar] [CrossRef] [Green Version]
- Härkegård, O.; Glad, S.T. Resolving actuator redundancy—Optimal control vs. control allocation. Automatica 2005, 41, 137–144. [Google Scholar] [CrossRef]
- Zhou, G.C.; Luo, Y.G.; Li, K.Q. Tire longitudinal force optimization distribution for independent 4WDEV. J. Tsinghua Univ. (Sci&Tech) 2009, 49, 111–115. [Google Scholar]
- Ling, L.Y. Stability Coordination and Torque Distribution of In-Wheel Motor Drive Electric Vehicles Based on FOSMC. Doctoral Dissertation, Jiangsu University, Jiangsu, China, 2020. [Google Scholar]
- Mokhiamar, O.; Abe, M. How the four wheels should share forces in an optimum cooperative chassis control. Control Eng. Pract. 2006, 14, 295–304. [Google Scholar] [CrossRef]
- Guo, L.; Ge, P.; Sun, D. Torque distribution algorithm for stability control of electric vehicle driven by four in-wheel motors under emergency conditions. IEEE Access 2019, 7, 104737–104748. [Google Scholar] [CrossRef]
- Farroni, F.; Russo, M.; Russo, R.; Terzo, M.; Timpone, F. A combined use of phase plane and handling diagram method to study the influence of tyre and vehicle characteristics on stability. Veh. Syst. Dyn. 2013, 51, 1265–1285. [Google Scholar] [CrossRef]
- Park, J.; Jeong, H.; Jang, I.G.; Hwang, S.-H. Torque distribution algorithm for an independently driven electric vehicle using a fuzzy control method. Energies 2015, 8, 8537–8561. [Google Scholar] [CrossRef]
- Tahami, F.; Kazemi, R.; Farhanghi, S. A novel driver assist stability system for all-wheel-drive electric vehicles. IEEE Trans. Veh. Technol. 2003, 52, 683–692. [Google Scholar] [CrossRef]
- Halvaei, A.; Kazemi, R.; Farhanghi, S. Yaw moment control of a two-wheel-drive EV, part I: Vehicle yaw moment control using fuzzy logic. In Proceedings of the 8th Iranian Conference on Electrical and Electronics Engineering, Isfahan, Iran, 18–20 May 2000. [Google Scholar]
- Mutoh, N. Driving and braking torque distribution methods for front-and rear-wheel-independent drive-type electric vehicles on roads with low friction coefficient. IEEE Trans. Ind. Electron. 2012, 59, 3919–3933. [Google Scholar] [CrossRef]
- Aksjonov, A.; Augsburg, K.; Vodovozov, V. Design and simulation of the robust ABS and ESP fuzzy logic controller on the complex braking maneuvers. Appl. Sci. 2016, 6, 382. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X. Advanced Sliding Mode Control for Mechanical Systems; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Song, P.; Zong, C.; Tomizuka, M. A terminal sliding mode-based torque distribution control for an individual-wheel-drive vehicle. J. Zhejiang Univ. Sci. A 2014, 15, 681–693. [Google Scholar] [CrossRef] [Green Version]
- Mokhiamar, O.; Abe, M. Simultaneous optimal distribution of lateral and longitudinal tire forces for the model following control. J. Dyn. Syst. Meas. Control 2004, 126, 753–763. [Google Scholar] [CrossRef]
- Jing, B. Study on State Observation and Torque Distribution Strategy of Hub-Motor-In-Wheels Driving Electric Vehicle. Doctoral Dissertation, Beijing Jiao Tong University, Beijing, China, 2016. [Google Scholar]
- Zhang, L.; Wang, F.; Sun, T.; Xu, B. A constrained optimization method based on BP neural network. Neural Comput. Appl. 2018, 29, 413–421. [Google Scholar] [CrossRef]
- Zhang, L. Research on State Estimation and Torque Vectoring Control of Distributed Drive Electric Vehicles. Doctoral Dissertation, Jilin University, Jilin, China, 2019. [Google Scholar]
- Ding, S.; Mei, K.; Yu, X. Adaptive second-order sliding mode control: A Lyapunov approach. IEEE Trans. Autom. Control 2021, 10, 1. [Google Scholar] [CrossRef]
- Shuai, Z.B. Modeling and Dynamics Control of Four-Wheel-Independent-Drive Electric Vehicle with Network-Induced Delays. Doctoral Dissertation, Tsinghua University, Beijing, China, 2014. [Google Scholar]
- Wang, J.; Longoria, R.G. Coordinated and reconfigurable vehicle dynamics control. IEEE Trans. Control Syst. Technol. 2009, 17, 723–732. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Bakker, E. The magic formula tyro model. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]
- Plumlee, J.H.; Bevly, D.M.; Hodel, A.S. Control of a ground vehicle using quadratic programming-based control allocation techniques. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 5, pp. 4704–4709. [Google Scholar]
- Yan, C.H. Torque Distribution and Control of Distributed Driving Electric Vehicles under Different Operating Conditions. Master’s Dissertation, Hefei University of Technology, Anhui, China, 2020. [Google Scholar]
- Sato, M.; Yamamoto, G.; Gunji, D. Development of wireless in-wheel motor using magnetic resonance coupling. J. IEEE Trans. Power Electron. 2015, 31, 5270–5278. [Google Scholar] [CrossRef]
- Hang, J.Q. Active Disturbance Rejection Control Technology: Control Technology for Estimating and Compensating Uncertain Factors; M. National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Censor, Y.; Zenios, S.A. Parallel Optimization: Theory, Algorithms, and Applications; Oxford University Press on Demand: Oxford, UK, 1997. [Google Scholar]
- Li, W. Four-Wheel Drive Electric Vehicles Torque Distribution Strategy Based on Objective Optimization. Master’s Dissertation, School of Automation Engineering, Sichuan, China, 2013. [Google Scholar]
- Zhai, L.; Sun, T.; Wang, J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Gu, J. Vehicle Control of Four-Wheel Driven Micro Electric Vehicle. Doctoral Dissertation, Tsinghua University, Beijing, China, 2012. [Google Scholar]
- Chen, Y.; Wang, J. Fast and global optimal energy-efficient control allocation with applications to over-actuated electric ground vehicles. IEEE Trans. Control Syst. Technol. 2011, 20, 1202–1211. [Google Scholar] [CrossRef]
- Yu, Z.P.; Zhang, L.J.; Xiong, L. Optimized Torque Distribution Control to Achieve Highe-r Fuel Economy of 4WD Electric Vehicle with Four In-Wheel Motors. J. Tongji Univ. (Nat. Sci.) 2005, 10, 79–85. [Google Scholar]
- Wu, D.; Li, Y.; Zhang, J.; Du, C. Torque distribution of a four in-wheel motors electric vehicle based on a PMSM system model. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2018, 232, 1828–1845. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, J. Torque distribution strategy for a front-and rear-wheel-driven electric vehicle. IEEE Trans. Veh. Technol. 2012, 61, 3365–3374. [Google Scholar] [CrossRef]
- Ren, Y.J. Research on Optimal Torque Allocation Control for Distributed Drive Electric Vehicle Via Multi-Objective Coordination. Doctoral Dissertation, Southeast University, Jiangsu, China, 2020. [Google Scholar]
- Hua, M.; Chen, G.; Zhang, B.; Huang, Y. A hierarchical energy efficiency optimization control strategy for distributed drive electric vehicles. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2019, 233, 605–621. [Google Scholar] [CrossRef]
- Ojo, F.K.; Akande, D.O.; Salleh, M.F.M. Optimal power allocation in cooperative networks with energy-saving protocols. J. IEEE Trans. Veh. Technol. 2020, 69, 5079–5088. [Google Scholar] [CrossRef]
- Amato, G.; Marino, R. Distributed nested PI slip control for longitudinal and lateral motion in four in-wheel motor drive electric vehicles. In Proceedings of the 58th IEEE Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019; pp. 7609–7614. [Google Scholar]
- Yu, D. Research on Control Strategy of Modular Permanent Magnet Synchronous In-Wheel Motor. Master’s Dissertation, Harbin Institute of Technology, Heilongjiang, China, 2017. [Google Scholar]
- Meng, B. Research on Torque Optimal Distribution of Four-Wheel Motor Driven Electric Vehicle. Master’s Dissertation, Chang’an University, Shanxi, China, 2019. [Google Scholar]
- Zhu, W.B.; Luo, Y.G.; Zhao, F.; Li, K. Driving torque coordination control of distributed drive electric vehicles. Int. J. Automot. Eng. 2012, 34, 185–189+196. [Google Scholar]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Kuo CF, J.; Hsu, C.H.; Tsai, C.C. Control of a permanent magnet synchronous motor with a fuzzy sliding-mode controller. Int. J. Adv. Manuf. Technol. 2007, 32, 757–763. [Google Scholar]
- Sun, W. Research on Optimal Torque Vectoring Control for Minimum Cornering Energy—Consumption of Four-Wheel-Independent-Drive Electric Vehicle. Doctoral Dissertation, Jilin University, Jilin, China, 2018. [Google Scholar]
- Xu, S.W. Application of MATLAB Vehicle Engineering Practice; Tsinghua University Press: Beijing, China, 2014. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley Pub. Co.: Boston, MA, USA, 1989; pp. 2104–2116. [Google Scholar]
- Askarzadeh, A. A memory-based genetic algorithm for optimization of power generation in a microgrid. IEEE Trans. Sustain. Energy 2017, 9, 1081–1089. [Google Scholar] [CrossRef]
- Gudise, V.G.; Venayagamoorthy, G.K. Comparison of particle swarm optimization and backpropagation as training algorithms for neural networks. In Proceedings of the IEEE Swarm Intelligence Symposium, SIS’03 (Cat. No. 03EX706), Indianapolis, IN, USA, 26 April 2003; pp. 110–117. [Google Scholar]
- Zhang, J.K.; Liu, S.Y.; Zhang, X.Q. Improved particle swarm optimization. Comput. Eng. Des. 2007, 17, 4215–4216+4219. [Google Scholar]
- Bakare, G.A.; Chiroma, I.N.; Venayagamoorthy, G.K. Comparison of PSO and GA for K-Node Set Reliability Optimization of a Distributed System. In Proceedings of the IEEE Swarm Intelligence Symposium, Indianapolis, IN, USA, 12–14 May 2006. [Google Scholar]
- Roberge, V.; Tarbouchi, M.; Labonté, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inform. 2012, 9, 132–141. [Google Scholar] [CrossRef]
- Wu, X.J.; Xue, H.F.; Li, M. GA-PSO Hybrid Programming Algorithm. J. Northwest Univ. (Nat. Sci. Ed.) 2005, 1, 39–43. [Google Scholar]
- Liu, J.C.; Chen, Y.Z. A BPNN-based Speed Prediction Method with GA-PSO Optimization Algorithm. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 40–47. [Google Scholar]
- Zheng, D.Y. Comparative Study on Torque Distribution Strategy of Distributed Driven Electric Vehicle Driven by Hub Motor. Master’s Dissertation, Harbin University of Science and Technology, Heilongjiang, China, 2018. [Google Scholar]
- Zhang, S.; Xiong, R.; Zhang, C. Pontryagin’s minimum principle-based power management of a dual-motor-driven electric bus. Appl. Energy 2015, 159, 370–380. [Google Scholar] [CrossRef]
- Wu, X.G.; Zheng, D.Y. Research on torque distribution of distributed driving electric vehicle based on fuzzy control. Int. J. Electr. Hybrid Veh. 2017, 9, 206–221. [Google Scholar] [CrossRef]
- Zhu, W.B.; Luo, Y.G.; Han, Y.W.; Li, K. Rule-based Traction System Failure Control of Distributed Electric Drive Vehicle. J. Mech. Eng. 2012, 48, 90–95+102. [Google Scholar]
- Ren, B.; Deng, W.; Chen, H. An energy-efficient torque distribution strategy for in-wheel-motored EVs based on model predictive control. Int. J. Veh. Des. 2020, 82, 18–44. [Google Scholar] [CrossRef]
- Ohtsuka, T. A continuation/GMRES method for fast computation of nonlinear receding horizon control. Automatica 2004, 40, 563–574. [Google Scholar] [CrossRef]
- Dizqah, A.M.; Lenzo, B.; Sorniotti, A.; Gruber, P.; Fallah, S.; De Smet, J. A fast and parametric torque distribution strategy for four-wheel-drive energy-efficient electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 4367–4376. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, Y.; Kano, Y.; Abe, M. A study on tyre force distribution controls for full drive-by-wire electric vehicle. Veh. Syst. Dyn. 2014, 52, 235–250. [Google Scholar] [CrossRef]
- Wang, R.; Chen, Y.; Feng, D.; Huang, X.; Wang, J. Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors. J. Power Sources 2011, 196, 3962–3971. [Google Scholar] [CrossRef]
- Zhu, H. Torque Allocation Control of Four-wheel Drive EVs Considering Energy Efficiency Optimization. Master’s Dissertation, Jilin University, Jilin, China, 2020. [Google Scholar]
- Hartl, R.F.; Sethi, S.P.; Vickson, R.G. A survey of the maximum principles for optimal control problems with state constraints. SIAM Rev. 1995, 37, 181–218. [Google Scholar] [CrossRef]
- Zhang, Z.Y. Research on Optimal Torque Allocation Strategy for Distributed Drive Electric Vehicle. Master’s Dissertation, Wuhan University of Science and Technology, Hubei, China, 2019. [Google Scholar]
- De Novellis, L.; Sorniotti, A.; Gruber, P. Wheel torque distribution criteria for electric vehicles with torque-vectoring differentials. IEEE Trans. Veh. Technol. 2013, 63, 1593–1602. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.; Xu, Z. Wheel torque distribution of four-wheel-drive electric vehicles based on multi-objective optimization. Energies 2015, 8, 3815–3831. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Tao, J.; Xiao, F. An optimal torque distribution control strategy for four-wheel independent drive electric vehicles considering energy economy. J. IEEE Access 2019, 7, 141826–141837. [Google Scholar] [CrossRef]
- Wang, Y.Z. Research on Torque Distribution Control Strategy for 8 In-Wheel Motor Drive Vehicle. Master’s Dissertation, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar]
- Xu, S.S. Research on Torque Distribution of In-Wheel Motor Driven Automobile Based on Driving Intention. Master’s Dissertation, Hebei University of Engineering, Hebei, China, 2020. [Google Scholar]
- Chen, T. State Estimation and Energy-Saving-Based Optimal Torque Allocation of Distributed Drive Electric Vehicle. Master’s Dissertation, Jiangsu University, Zhenjiang, China, 2017. [Google Scholar]
- Yamakawa, J.; Watanabe, K. A method of optimal wheel torque determination for independent wheel drive vehicles. J. Terramechanics 2006, 43, 269–285. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, C.J.; Kim, S.H.; Choi, J.-Y.; Han, C.-S. Development of adaptive direct yaw-moment control method for electric vehicle based on identification of yaw-rate model. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 1098–1103. [Google Scholar]
- Wang, L.; Huang, Z.S.; Fu, D. A Method, System and Medium for Torque Distribution of an In-Wheel Motor Vehicle. Patent CN114083995A, 25 February 2022. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Torque Distribution Scheme | Advantages | Disadvantage |
|---|---|---|
| A torque vector distribution control method combining differential braking and differential driving [14]. | It can reduce the wheel torque output, improve the utilization rate of the road adhesion limit, and then expand the stability margin of the vehicle. | Without considering the uncertainty of the motor output torque, the robustness of torque distribution needs to be further improved. |
| The driving force distribution based on compound slip rate is proposed on the basis of controlling the driving force distribution based on equal torque and equal power [15]. | While obtaining better longitudinal driving performance, better lateral stability can also be obtained, and the slip ratio of each wheel can be better controlled to tend to an ideal value. | The equal torque and equal power control modes do not fully consider the working state of each wheel, and the compound slip rate control strategy has a large amount of calculation and a long response time when optimizing the current distribution of each wheel on demand. |
| Terminal Sliding Mode Technology (TSMC) [30] | Fast, limited time convergence and high steady-state accuracy allow the driver to more easily steer the vehicle without steering force compensation for the nonlinearity of the vehicle’s yaw response. | The fault tolerance integration is not high, and there is jitter interference in the operation process. |
| Based on the error back propagation algorithm and the fastest descent method of BP neural network, the yaw moment algorithm of PID is adjusted [32]. | By considering various constraints, the driving environment of the car can be simulated more realistically, and the adhesion conditions of the road surface can be well used and the life of the motor can be extended when the motor torque is distributed. | The parameters such as the position of the center of mass of the vehicle, the air pressure of the tires and the rolling radius are not considered, and the control target needs to be further refined. |
| Professional drivers conduct experiments with the Adaptive Second-Order Sliding Mode (ASOSM) algorithm [34]. | The research field of optimal torque distribution is broadened. It overcomes the chattering problem of traditional sliding mode and improves the robustness of the control system to model errors and parameter uncert-ainties. | Different drivers’ driving styles and driving habits are not considered, and the experimental data are relatively simple, and the information such as geography and external traffic cannot be effectively combined with vehicle dynamics control. |
| Considering factors such as communication delay and interruption in distributed control system, a four-wheel torque optimal distribution algorithm with communication fault tolerance is designed [36]. | The vehicle controller and the motor controller can work in the fault-tolerant mode when there is a network problem, and can switch to the normal mode when the network is normal, which improves the security when the network fails. | Delayed signals in the feedback channel were not considered, nor were long-term delays investigated experimentally. |
| Active Disturbance Rejection Controller (ADRC), quadratic programming algorithm [40]. | It effectively solves the contradiction between overshoot and rapidity of the classical controller, and makes the param-eters of feedback gain and error differential feedback gain easy to set, enhances the robustness of the control system, and improves the accuracy of calculation. | The influence of vehicle controller on the distribution of driving force is not considered, but the effect of vehicle suspension is simplified. |
| Based on the motor efficiency MAP map, a scheme of evenly distributing torque to four wheels is proposed [46]. | For the first time, a new way of studying the torque distribution optimization problem by using the loss analysis method based on the motor efficiency model is proposed. | This scheme has only been tested under specific motor and algorithm conditions, and whether it is applicable to other motor and algorithm conditions remains to be verified by further experiments. |
| A kind of “Energy-and-Adhesion” (EAA) joint optimization to synergistically optimize the energy efficiency of the power system and the utilization rate of road adhesion, with cubic polynomial combined with least squares fitting [50]. | Compared with the quadratic polynomial fitting method and the piecewise linearized fitting method, the proposed cubic polynomial has better effect, and realizes the synergistic optimization of the energy efficiency and steering characteristics of the chassis system under steering conditions. | The calculation steps of the cubic polynomial are cumbersome and take a long time, and the information such as the mass of the vehicle, the position of the center of mass, the vertical load of the wheel, and the side-slip angle of the center of mass of the body are not considered. |
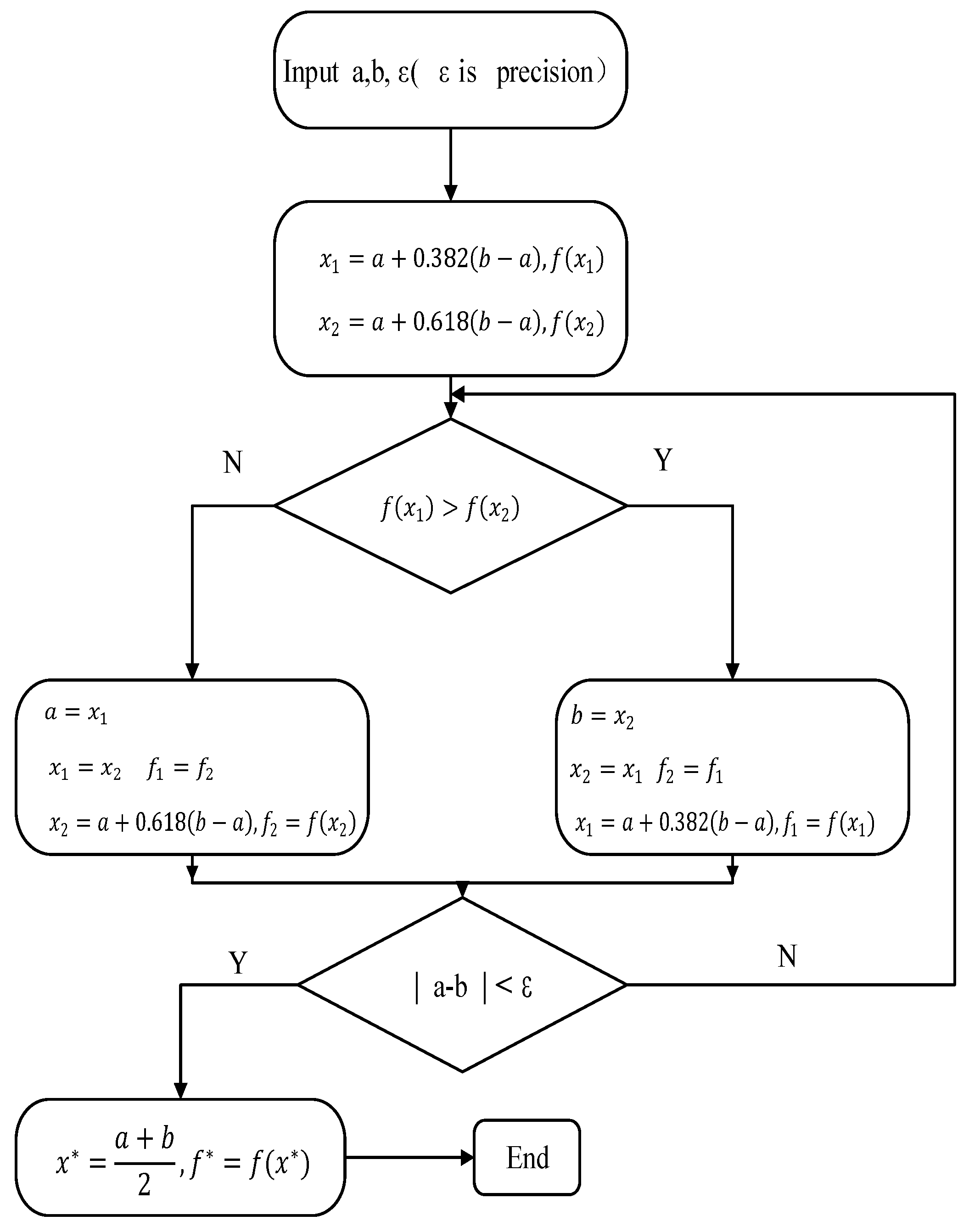
| Fast search method (i.e., golden section method), fuzzy algorithm [56]. | Without being constrained by the parameters of components such as the motor, the driving torque distribution ratio of the front and rear axles can be controlled in the working area where the driving efficiency of the system is optimal. | The algorithm will have a fluctuation problem, which needs to be solved by further calibration, and the fuzzy algorithm will also have a relatively large error. |
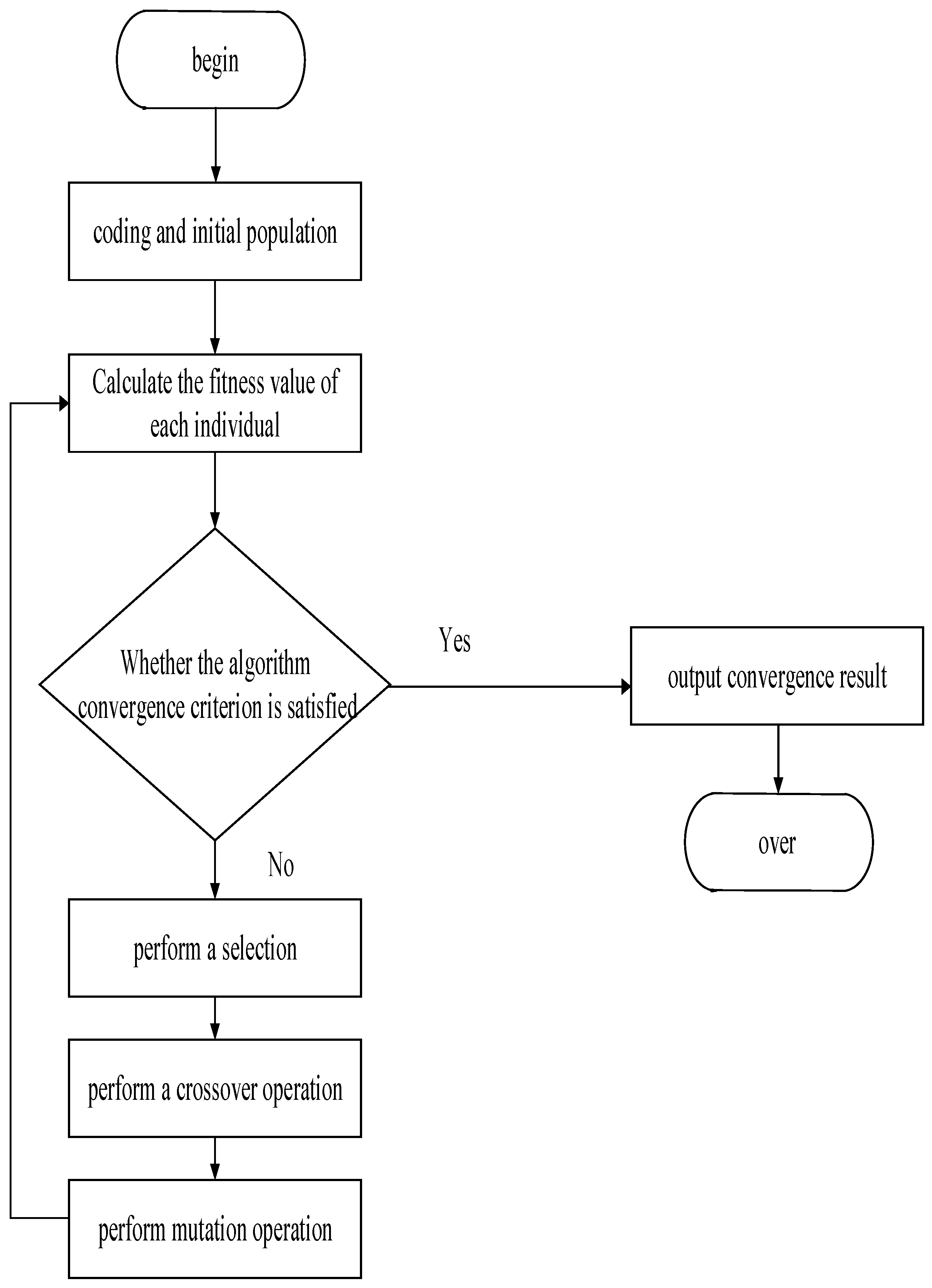
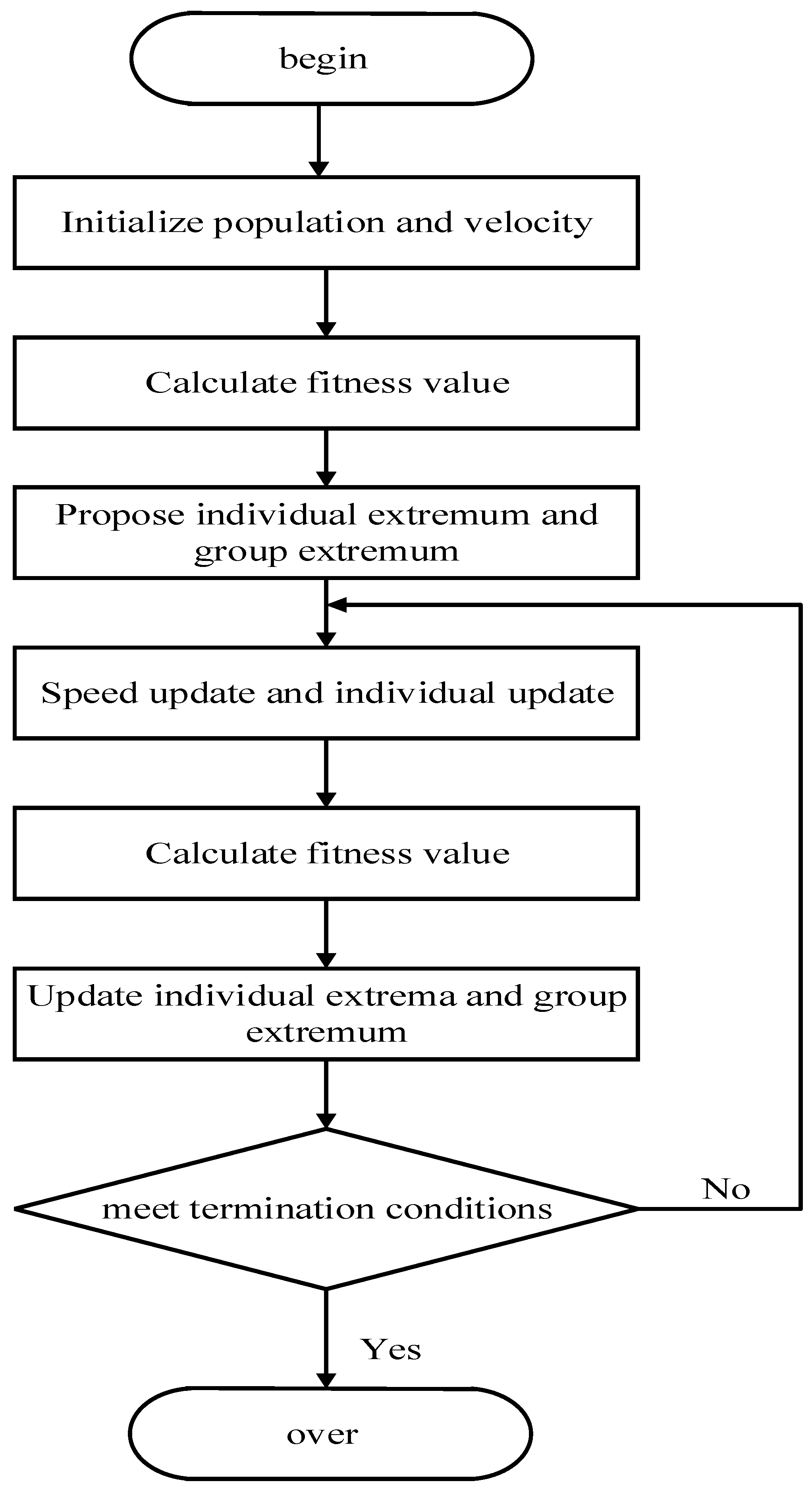
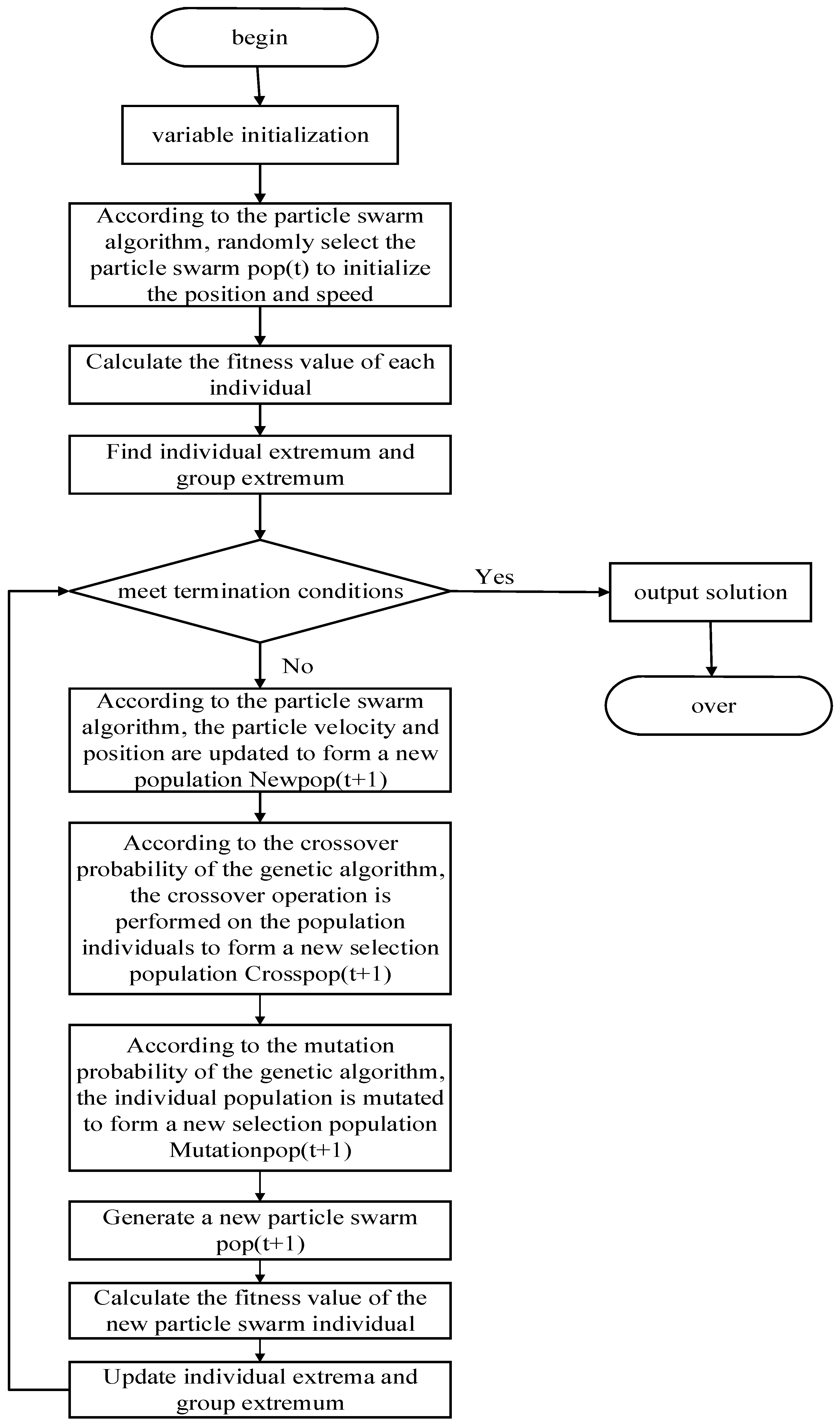
| Genetic algorithmparticle swarm optimization, (PSO)GA-PSO [60] | It avoids the optimization algorithm from falling into the local optimal soluteon, improves the convergence speed and shortens the optimization time, determines the optimal energy-saving contribution of torque distribution control under different curve conditions, and realizes the online application of torque optimization control. | The energy consumption of the vehicle in the straight-line driving condition has not been deeply discussed, and the vehicle driving stability and safety are still lacking. |
| Model Predictive Control Energy-Saving (MPC-EE) Torque Distribution Algorithm Based on Model Predictive Control (MPC), Trial and Error Method [75]. | It can effectively improve energy efficiency and computational efficiency, and has better real-time performance. | Some conditions such as tire slip rate saturation constraints, road conditions, adhesion coefficient utilization, etc. need to be further considered. |
| Considering the performance index function of motor and tire slip energy loss comprehensively, the torque distribution is constructed as an opti-mal control problem, and the sequential quadratic programming method (SQP) is used to solve it [80]. | Under the premise of ensuring the stability of the vehicle, it can reduce energy consumption and greatly reduce the wear of tires, and effectively improve the service life of tires. | Only offline simulation verification and analysis are carried out, the solution is time consuming, and the solution efficiency cannot keep up with real-time applications, and the motor characteristics under deceleration braking are not considered. |
| Adaptive reinforcement learning (AdaBoost), cost function [87]. | The trained recognition model can judge the driver’s intention more than 98%, and the cost function converts the problem into a quadratic progr-amming problem, which reduces the computational load of the controller as much as possible and ensures the calculation speed. | When considering vehicle dynamics, the effect of suspension system on dynamics is not designed, which brings certain errors to the study of handling stability control. The driver-in-the-loop verification is only carried out under driving simulator conditions. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, S.; Fan, X.; Wang, Q.; Chen, X.; Zhu, S. Review on Torque Distribution Scheme of Four-Wheel In-Wheel Motor Electric Vehicle. Machines 2022, 10, 619. https://doi.org/10.3390/machines10080619
He S, Fan X, Wang Q, Chen X, Zhu S. Review on Torque Distribution Scheme of Four-Wheel In-Wheel Motor Electric Vehicle. Machines. 2022; 10(8):619. https://doi.org/10.3390/machines10080619
Chicago/Turabian StyleHe, Shuwen, Xiaobin Fan, Quanwei Wang, Xinbo Chen, and Shuaiwei Zhu. 2022. "Review on Torque Distribution Scheme of Four-Wheel In-Wheel Motor Electric Vehicle" Machines 10, no. 8: 619. https://doi.org/10.3390/machines10080619
APA StyleHe, S., Fan, X., Wang, Q., Chen, X., & Zhu, S. (2022). Review on Torque Distribution Scheme of Four-Wheel In-Wheel Motor Electric Vehicle. Machines, 10(8), 619. https://doi.org/10.3390/machines10080619