


Power Loss Analysis of a Five-Phase Drive System Using a Synchronous Reluctance Motor and an Indirect Matrix Converter with Reduced Switching Losses




Abstract
:1. Introduction
2. Indirect Matrix Converter
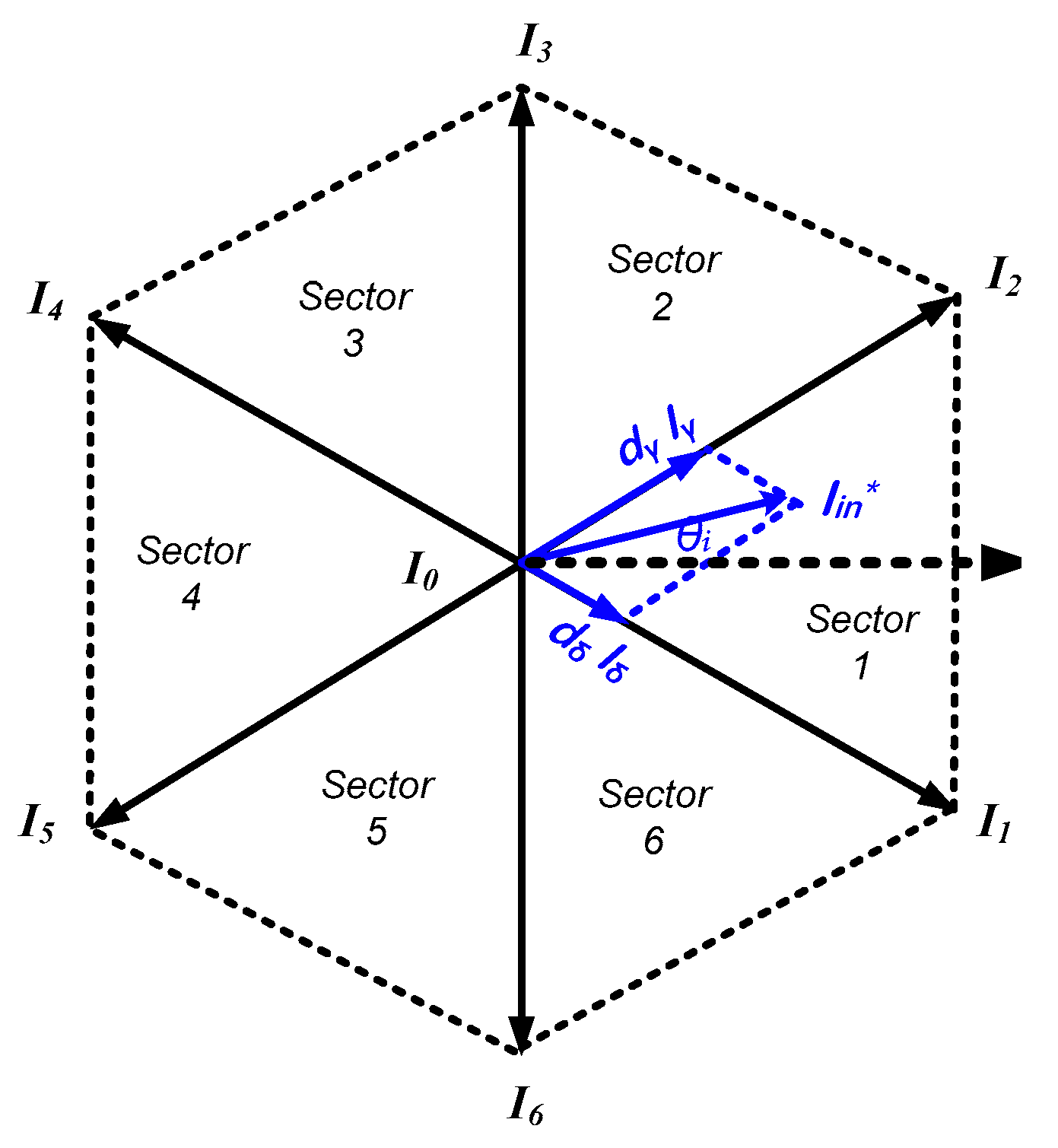
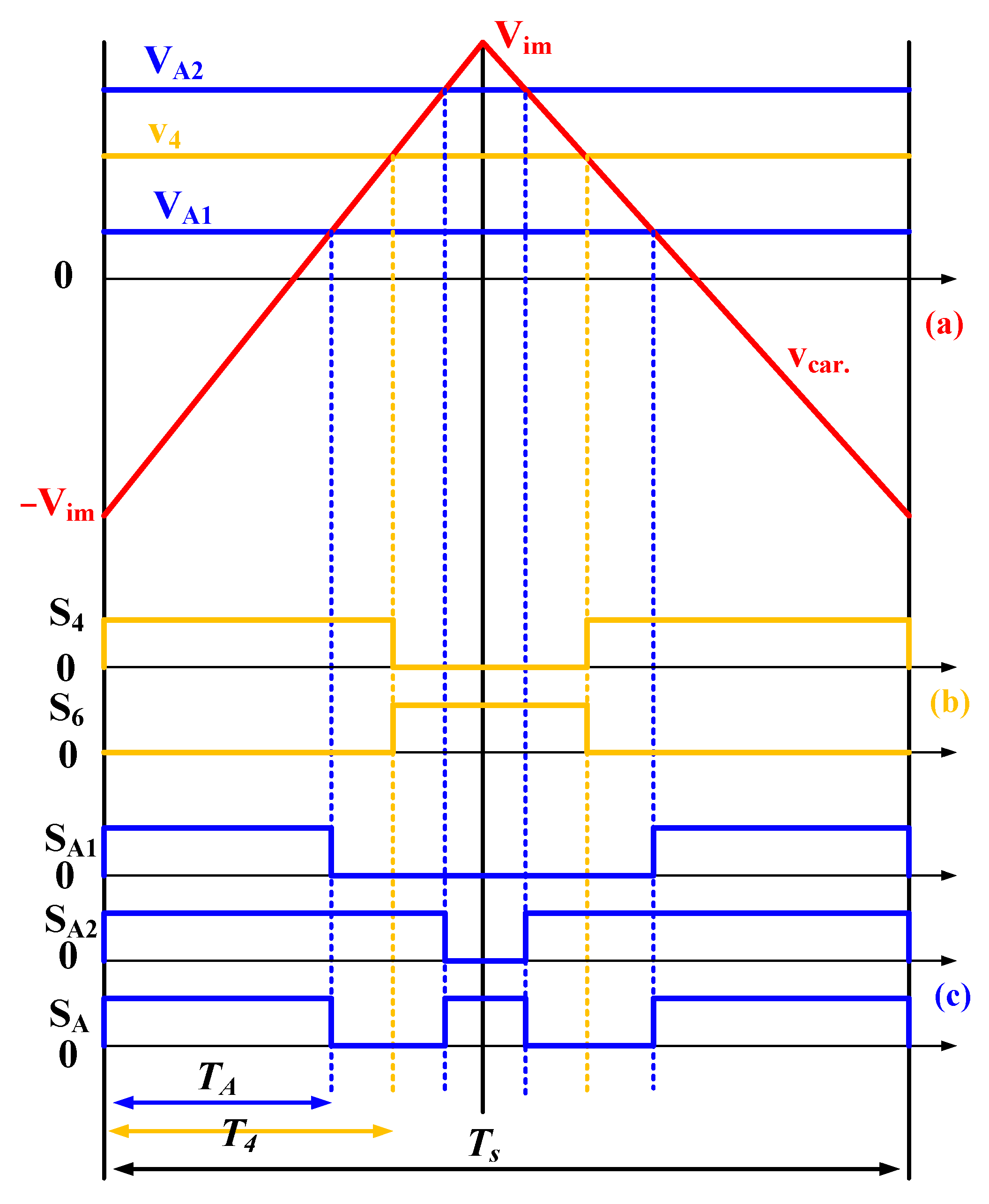
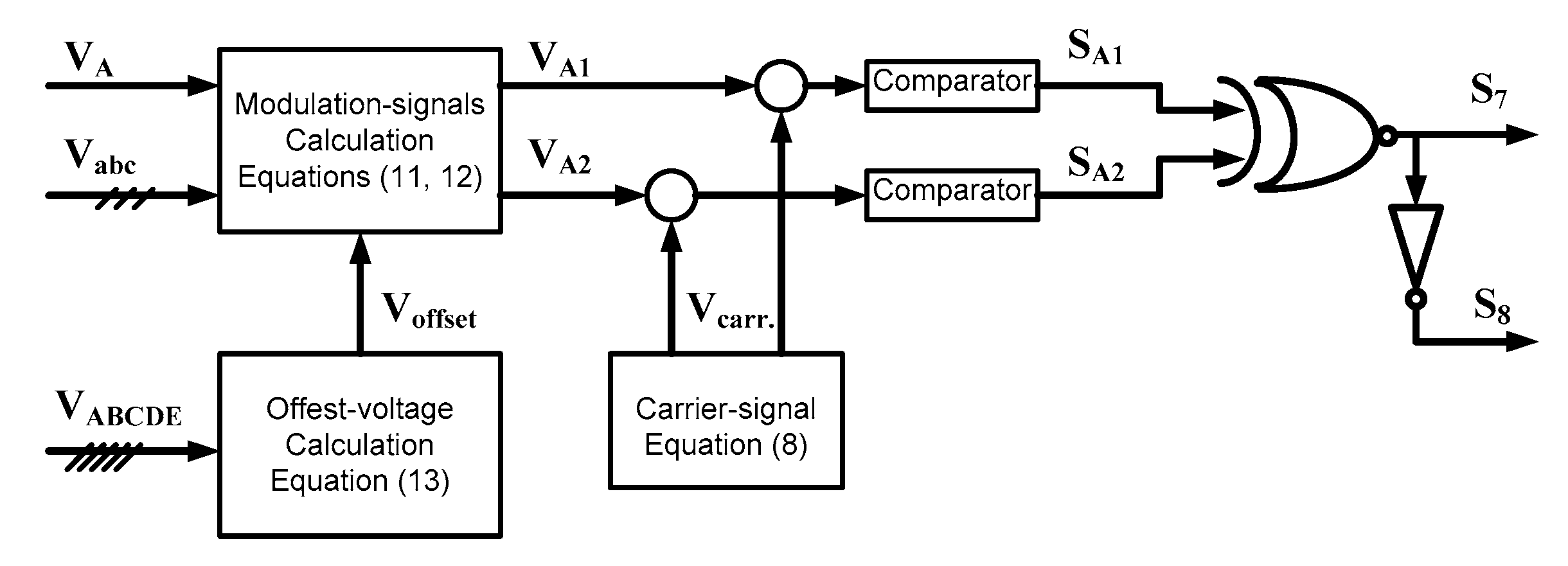
2.1. Controlled Rectifier
2.2. Five-Phase Inverter
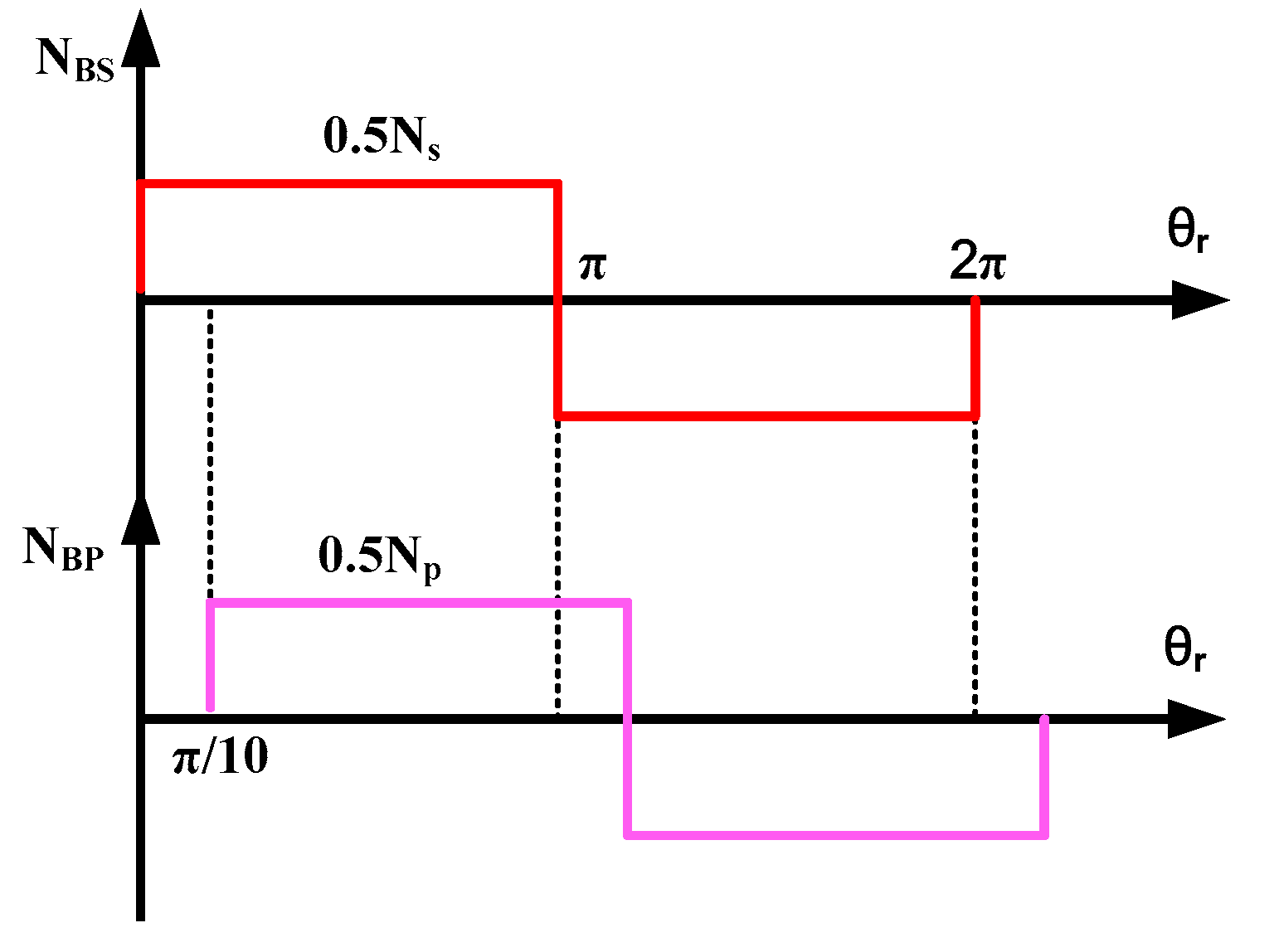
3. Five-Phase Synchronous Reluctance Motor
4. Analysis of Power Flow diagram
4.1. Indirect Matrix Power Losses
4.1.1. Rectifier Conduction Losses
4.1.2. Rectifier Switching Losses
4.1.3. Inverter Conduction Losses
4.1.4. Inverter Switching Losses
4.2. The Motor Losses
4.2.1. The Copper Losses
4.2.2. The Iron Losses
4.2.3. The Mechanical Losses
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yepes, A.G.; Doval-Gandoy, J.; Baneira, F.; Pérez-Estévez, D.; López, O. Current Harmonic Compensation for $n$-Phase Machines with Asymmetrical Winding Arrangement and Different Neutral Configurations. IEEE Trans. Ind. Appl. 2017, 53, 5426–5439. [Google Scholar] [CrossRef]
- Abdel-Khalik, A.; Elgenedy, M.; Ahmed, S.; Massoud, A. An improved fault-tolerant five-phase induction machine using a combined star/pentagon single layer stator winding connection. IEEE Ind. Electron. 2016, 63, 618–628. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; EL-Kholy, E.E.; Sergeant, P. Construction of Synchronous Reluctance Machines with Combined Star-Pentagon Configuration Using Standard Three-Phase Stator Frames. IEEE Trans. Ind. Electron. 2022, 69, 7582–7595. [Google Scholar] [CrossRef]
- Agamloh, E.B.; Boglietti, A.; Cavagnino, A. The Incremental Design Efficiency Improvement of Commercially Manufactured Induction Motors. IEEE Trans. Ind. Appl. 2013, 49, 2496–2504. [Google Scholar] [CrossRef]
- Yamazaki, K. Torque and efficiency calculation of an interior permanent magnet motor considering harmonic iron losses of both the stator and rotor. IEEE Trans. Magn. 2003, 39, 1460–1463. [Google Scholar] [CrossRef]
- Mademlis, C.; Kioskeridis, I.; Margaris, N. Optimal efficiency control strategy for interior permanent-magnet synchronous motor drives. IEEE Trans. Energy Convers. 2004, 19, 715–723. [Google Scholar] [CrossRef]
- Fang, L.; Jung, J.; Hong, J.; Lee, J. Study on High-Efficiency Performance in Interior Permanent-Magnet Synchronous Motor with Double-Layer PM Design. IEEE Trans. Magn. 2008, 44, 4393–4396. [Google Scholar] [CrossRef]
- Guglielmi, P.; Boazzo, B.; Armando, E.; Pellegrino, G.; Vagati, A. Permanent-Magnet Minimization in PM-Assisted Synchronous Reluctance Motors for Wide Speed Range. IEEE Trans. Ind. Appl. 2013, 49, 31–41. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Baek, J.; Choi, S. Comparison of optimized permanent magnet assisted synchronous reluctance motors with three-phase and five-phase systems. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2396–2402. [Google Scholar]
- Tawfiq, K.B.; Ibrahim, M.N.; EL-Kholy, E.E.; Sergeant, P. Comparative Analysis of Refurbishing Methods of Three-Phase Synchronous Reluctance Machines to Five-Phase with Minimum Cost. IEEE Trans. Ind. Appl. 2021, 57, 6007–6022. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; EL-Kholy, E.E.; Sergeant, P. Performance Improvement of Synchronous Reluctance Machines—A Review Research. IEEE Trans. Magn. 2021, 57, 10. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; EL-Kholy, E.E.; Sergeant, P. Performance Analysis of a Rewound Multiphase Synchronous Reluctance Machine. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 297–309. [Google Scholar] [CrossRef]
- Hu, J.S.; Chen, K.Y.; Shen, T.Y.; Tang, C.H. Analytical solutions of multilevel space vector PWM for Multi-phase voltage source inverters. IEEE Trans. Power Electron. 2011, 26, 1489–1502. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.H.; Toliyat, A.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Xu, L.; Lipo, T.A. A Five Phase Reluctance Motor with High Specific Torque. IEEE Trans. Ind. Appl. 1992, 28, 659–667. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; EL-Kholy, E.E.; Sergeant, P. An Improved Fault-Tolerant Control of a Five-Phase Synchronous Reluctance Motor Connected to Matrix Converter. In Proceedings of the 2021 IEEE 13th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Virtual, 22–25 August 2021; pp. 276–281. [Google Scholar]
- Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. An Enhanced Fault-Tolerant Control of a Five-Phase Synchronous Reluctance Motor Fed from a Three-to-Five-phase Matrix Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 4182–4194. [Google Scholar] [CrossRef]
- Tran, Q.; Lee, H. An Advanced Modulation Strategy for Three-to-Five-Phase Indirect Matrix Converters to Reduce Common-Mode Voltage with Enhanced Output Performance. IEEE Trans. Ind. Electron. 2018, 65, 5282–5291. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Lee, H. A New SVM Method for an Indirect Matrix Converter with Common-Mode Voltage Reduction. IEEE Trans. Ind. Inform. 2014, 10, 61–72. [Google Scholar] [CrossRef]
- Tran, Q.H.; Nguyen, T.D.; Phuong, L.M. Simplified Space-Vector Modulation Strategy for Indirect Matrix Converter with Common-Mode Voltage and Harmonic Distortion Reduction. IEEE Access 2020, 8, 218489–218498. [Google Scholar] [CrossRef]
- Jayaprakasan, S.; Ashok, S.; Ramchand, R. Analysis of Current Error Space Phasor for a Space Vector Modulated Indirect Matrix Converter. IEEE Trans. Ind. Electron. 2021, 69, 4451–4459. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. A Simple Commutation Method and a Cost-Effective Clamping Circuit for Three-to-Five-Phase Indirect-Matrix Converters. Electronics 2022, 11, 808. [Google Scholar] [CrossRef]
- Nielsen, P.; Blaabjerg, F.; Pederson, J.K. Novel Solutions for Protection of Matrix Converter to Three Phase Induction Machine. In Proceedings of the IEEE IAS Conference Record, New Orleans, LA, USA, 5–9 October 1997; pp. 1447–1454. [Google Scholar]
- Lei, Y.; Zhao, Z.; Wang, S.; Dorrell, D.G.; Xu, W. Design and Analysis of Star–Delta Hybrid Windings for High-Voltage Induction Motors. IEEE Trans. Ind. Electron. 2011, 58, 3758–3767. [Google Scholar] [CrossRef]
- Kaku, B.; Miyashita, I.; Sone, S. Switching Loss Minimised Space Vector PWM Method for IGBT Three-Level Inverter. IEE Proc. Electr. Power Appl. 1997, 144, 182–190. [Google Scholar] [CrossRef]
- Arafat, A.; Choi, S. Comparison of electrical losses in an inverter-fed five-phase and three-phase permanent magnet assisted synchronous reluctance motor. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 2847–2854. [Google Scholar]
- Bertotti, G. General properties of power losses in soft ferromagnetic materials. IEEE Trans. Magn. 1998, 24, 621–630. [Google Scholar] [CrossRef]
- Ibrahim, M.N.; Sergeant, P.; Rashad, E.M. Synchronous Reluctance Motor Performance Based on Different Electrical Steel Grades. IEEE Trans. Magn. 2015, 51, 11. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector Number | ON Switch | The Duty Cycles and Modulated Switches | DC-Link Voltage | |||
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. Power Loss Analysis of a Five-Phase Drive System Using a Synchronous Reluctance Motor and an Indirect Matrix Converter with Reduced Switching Losses. Machines 2022, 10, 738. https://doi.org/10.3390/machines10090738
Tawfiq KB, Ibrahim MN, Sergeant P. Power Loss Analysis of a Five-Phase Drive System Using a Synchronous Reluctance Motor and an Indirect Matrix Converter with Reduced Switching Losses. Machines. 2022; 10(9):738. https://doi.org/10.3390/machines10090738
Chicago/Turabian StyleTawfiq, Kotb B., Mohamed N. Ibrahim, and Peter Sergeant. 2022. "Power Loss Analysis of a Five-Phase Drive System Using a Synchronous Reluctance Motor and an Indirect Matrix Converter with Reduced Switching Losses" Machines 10, no. 9: 738. https://doi.org/10.3390/machines10090738
APA StyleTawfiq, K. B., Ibrahim, M. N., & Sergeant, P. (2022). Power Loss Analysis of a Five-Phase Drive System Using a Synchronous Reluctance Motor and an Indirect Matrix Converter with Reduced Switching Losses. Machines, 10(9), 738. https://doi.org/10.3390/machines10090738