
Modeling the Contact Force in Constrained Human–Robot Collisions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Pinching Model
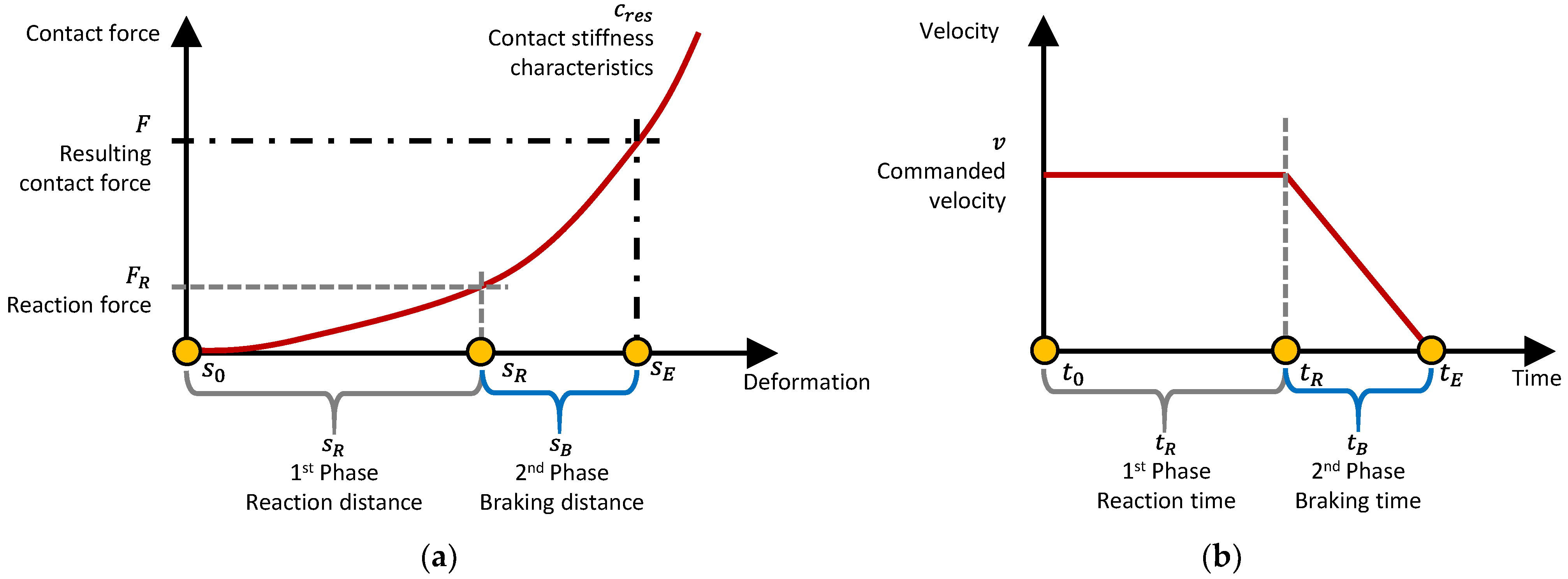
2.1. Generalized Collision Behavior
- First Phase: Reaction distance. At initial contact, the force rises while the robot motion controller compensates the velocity error caused by the external forces. As long as the force or torque thresholds monitored by the robot’s safety controller are not exceeded, the controller continues to compensate, as illustrated in Figure 1b.
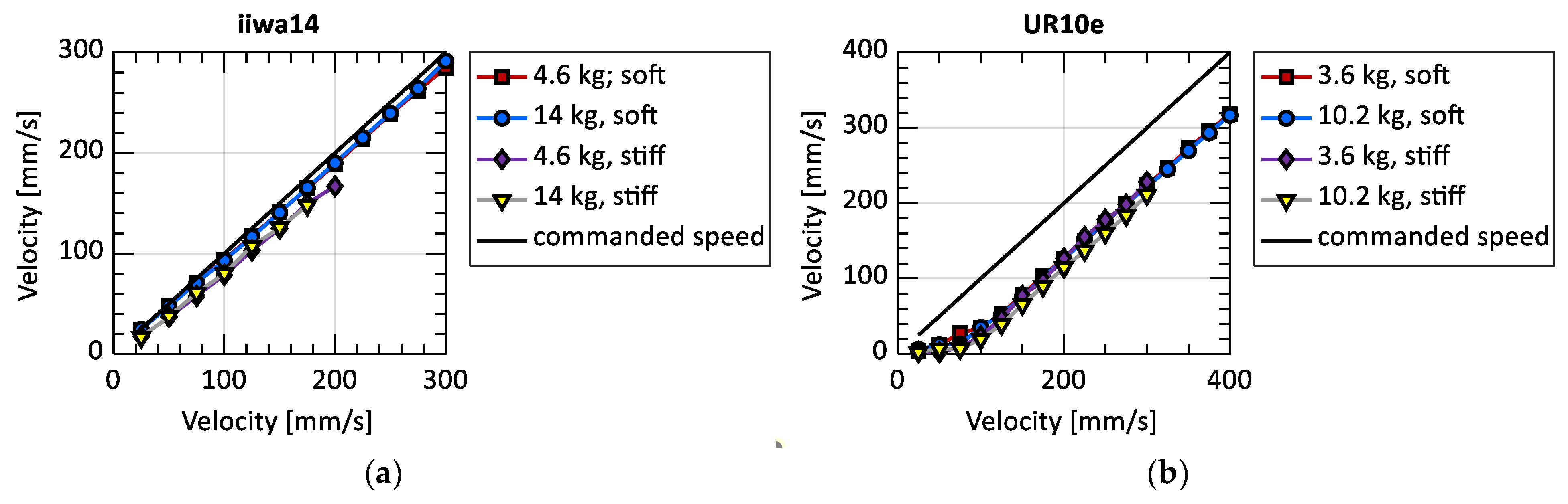
- Second Phase: Braking distance. As soon as the robot detects an exceedance of the force or torque threshold, it immediately initiates an emergency stop. Typical motion controllers are configured to fulfill a braking maneuver of category 1 (S1). Such a maneuver is characterized by asynchronous and maximum deceleration of each joint drive. The path of the contact point during the braking determines the maximum contact force. Based on the first assumption that the robot holds its velocity, the velocity before the braking starts can be assumed to be equal to the commanded velocity.
2.2. Model Description
2.3. Model Parameterization
3. Experiments
3.1. Setup
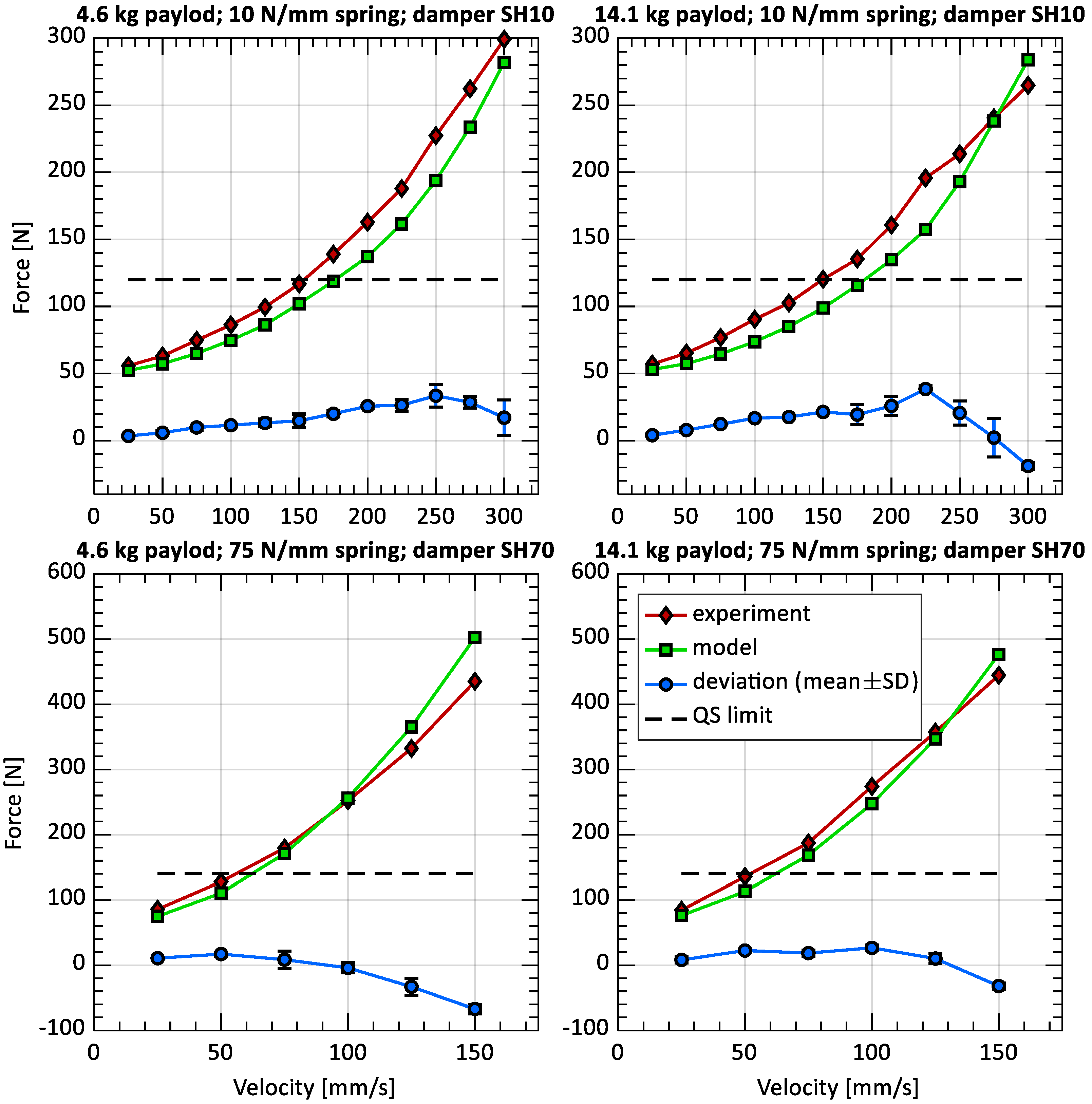
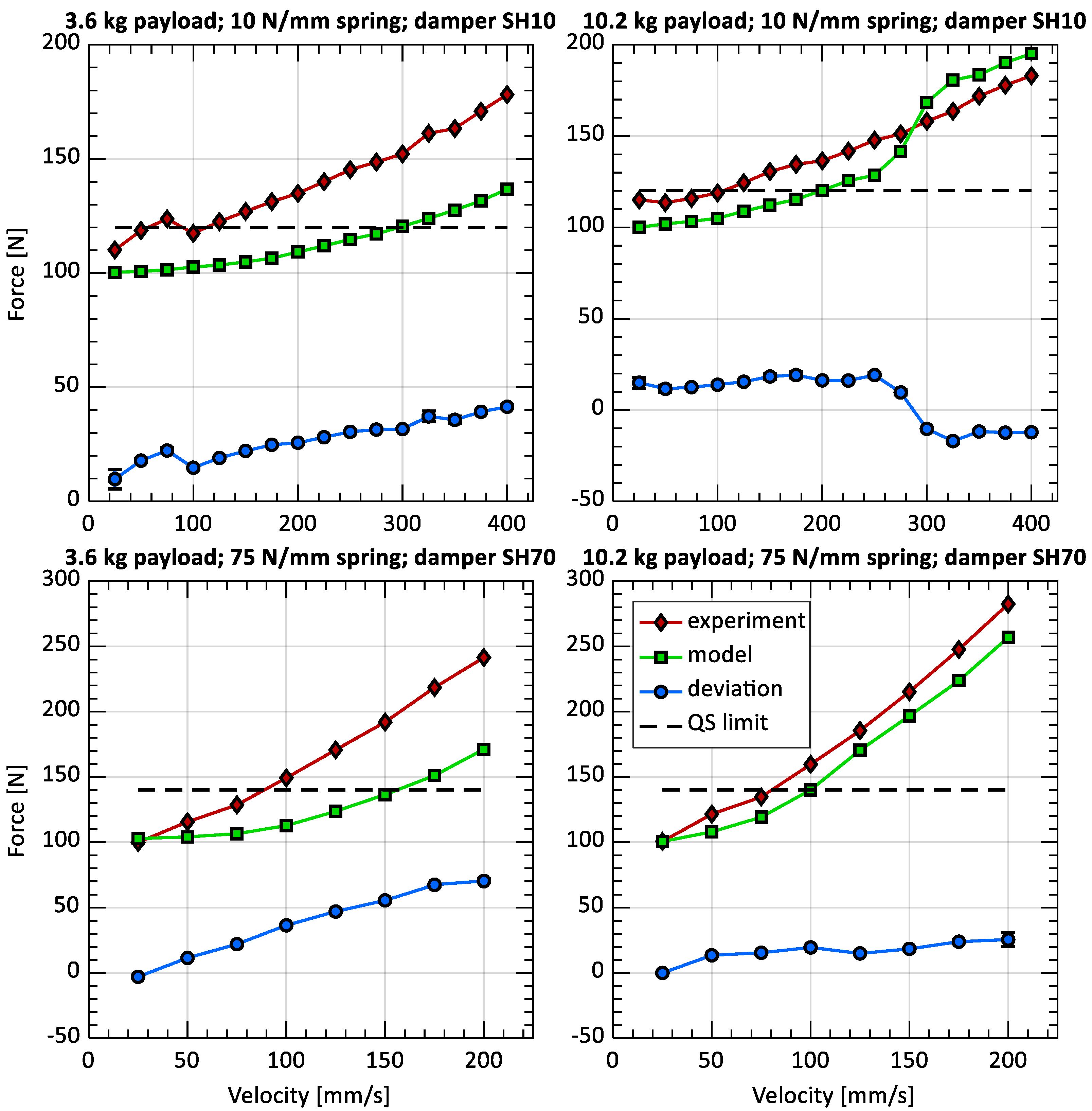
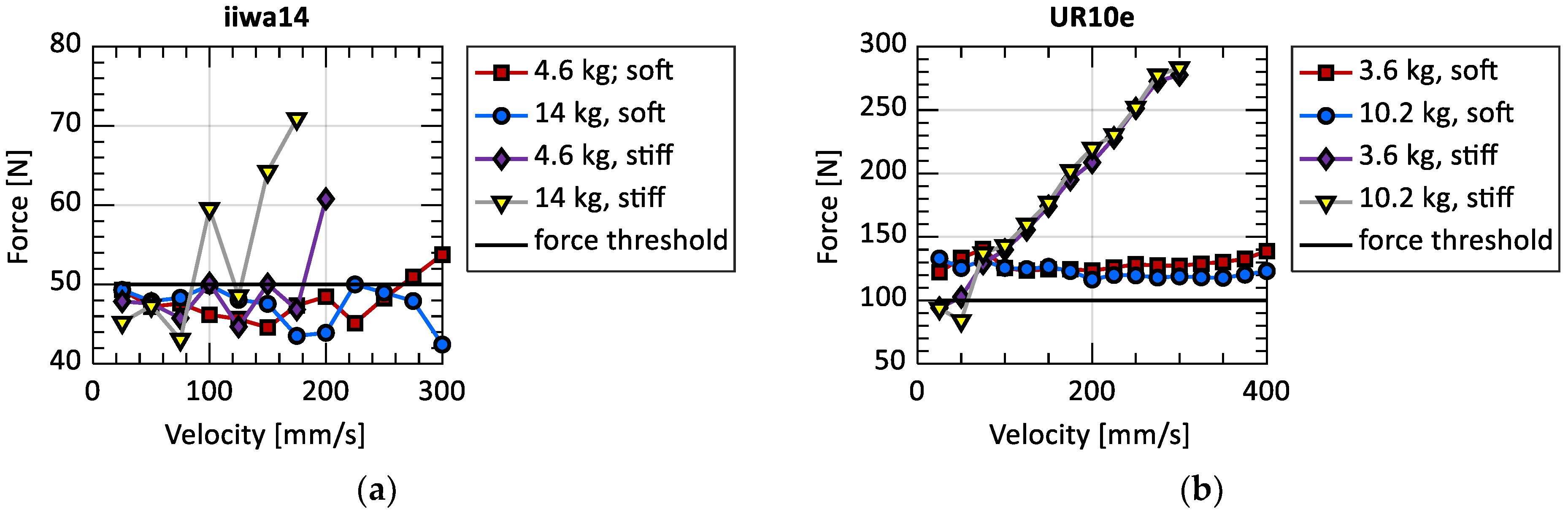
3.2. Results
4. Discussion
4.1. Comparison of the Model with the Experimental Results
4.2. Model Accuracy
4.2.1. Reaction Distance
4.2.2. Braking Distance
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Faber, M.; Bützler, J.; Schlick, C.M. Human-robot Cooperation in Future Production Systems: Analysis of Requirements for Designing an Ergonomic Work System. Procedia Manuf. 2015, 3, 510–517. [Google Scholar] [CrossRef]
- Behrens, R.; Saenz, J.; Vogel, C.; Elkmann, N. Upcoming Technologies and Fundamentals for Safeguarding All Forms of Human-Robot Collaboration. In Proceedings of the 8th International Conference on Safety of Industrial Automated Systems, Königswinter, Germany, 18–20 November 2015. [Google Scholar]
- ISO 10218-2:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. International Organization for Standardization (ISO): Geneva, Switzerland, 2011.
- ISO/TS 15066; Robots and Robotic Devices—Collaborative Robots. International Organization for Standardization (ISO): Geneva, Switzerland, 2016.
- Yamada, Y.; Hirasawa, Y.; Huang, S.; Umetani, Y.; Suita, K. Human-robot contact in the safeguarding space. IEEE/ASME Trans. Mechatron. 1997, 2, 230–236. [Google Scholar] [CrossRef]
- de Luca, A.; Albu-Schaffer, A.; Haddadin, S.; Hirzinger, G. Collision Detection and Safe Reaction with the DLR-III Lightweight Manipulator Arm. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 1623–1630. [Google Scholar] [CrossRef]
- Lee, S.-D.; Kim, Y.-L.; Song, J.-B. Novel collision detection index based on joint torque sensors for a redundant manipulator. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4636–4641. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schaffer, A.; Frommberger, M.; Hirzinger, G. The role of the robot mass and velocity in physical human-robot interaction—Part II: Constrained blunt impacts. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1339–1345. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schaeffer, A.; Hirzinger, G. The role of the robot mass and velocity in physical human-robot interaction—Part I: Non-constrained blunt impacts. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1331–1338. [Google Scholar] [CrossRef]
- Huelke, M.; Ottersbach, H.-J. How to approve Collaborating Robots: The IFA force pressure measurement system. In Proceedings of the 7th International Conference on the Safety of Industrial Automated Systems, Montreal, QC, Canada, 11–12 October 2012. [Google Scholar]
- BGHM (Ed.) DGUV-Information—Kollaborierende Robotersysteme: Planung von Anlagen Mit Der Funktion “Leistungs-und Kraftbegrenzung; Deutsche Gesetzliche Unfallversicherung (DGUV): Berlin, Germany, 2017. [Google Scholar]
- Kovincic, N.; Gattringer, H.; Müller, A.; Brandstötter, M. A Boosted Decision Tree Approach for a Safe Human-Robot Collaboration in Quasi-static Impact Situations. In Advances in Service and Industrial Robotics, Proceedings of the 29th (Mechanisms and Machine Science), Beijing, China, 16–17 October 2020; Zeghloul, S., Laribi, M.A., Arevalo, J.S.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 235–244. [Google Scholar]
- Scibilia, A.; Valori, M.; Pedrocchi, N.; Fassi, I.; Herbster, S.; Behrens, R.; Saenz, J.; Magisson, A.; Bidard, C.; Kuhnrich, M.; et al. Analysis of Interlaboratory Safety Related Tests in Power and Force Limited Collaborative Robots. IEEE Access 2021, 9, 80873–80882. [Google Scholar] [CrossRef]
- Bicchi, A.; Tonietti, G. Fast and “Soft-Arm” Tactics. IEEE Robot. Automat. Mag. 2004, 11, 22–33. [Google Scholar] [CrossRef]
- Haddadin, S.; Krieger, K.; Mansfeld, N.; Albu-Schaffer, A. On impact decoupling properties of elastic robots and time optimal velocity maximization on joint level. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5089–5096. [Google Scholar] [CrossRef]
- Herbster, S.; Behrens, R.; Elkmann, N. A New Approach to Estimate the Apparent Mass of Collaborative Robot Manipulators. In Experimental Robotics; Puzo, M., Ed.; Springer International Publishing: Cham, Switzerland, 2021; pp. 211–221. [Google Scholar]
- Jeanneau, G.; Bégoc, V.; Briot, S. A Reduced Mass-Spring-Mass-Model of Compliant Robots Dedicated to the Evaluation of Impact Forces. J. Mech. Robot. 2024, 16, 041012. [Google Scholar] [CrossRef]
- Seriani, S.; Gallina, P.; Scalera, L.; Lughi, V. Development of n-DoF Preloaded Structures for Impact Mitigation in Cobots. J. Mech. Robot. 2018, 10, 051009. [Google Scholar] [CrossRef]
- Herbster, S.; Behrens, R.; Elkmann, N. A New Conversion Method to Evaluate the Hazard Potential of Collaborative Robots in Free Collisions. In Experimental Robotics; Siciliano, B., Laschi, C., Khatib, O., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 222–232. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Safe Physical Human-Robot Interaction: Measurements, Analysis and New Insights. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2011; Volume 66, pp. 395–407. [Google Scholar]
- Vemula, B.R.; Ramteen, M.; Spampinato, G.; Fagerstrom, B. Human-robot impact model: For safety assessment of collaborative robot design. In Proceedings of the 2017 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Ottawa, ON, Canada; 2017; pp. 236–242. [Google Scholar] [CrossRef]
- Behrens, R.; Zimmermann, J. Bestimmung Biomechanischer Korridore zur Bewertung von Mechanischen Gefährdungen und Ableitung von Steifigkeitsparametern für Zukünftige Messmittel (= Determination of Biomechanical Corridors for the Evaluation of Mechanical Hazards and Estimation of Stiffness Parameters for Future Measurement Devices = Détermination de Corridors Biomécaniques Destinés à L’évaluation de Risques Mécaniques et à la Déduction de Paramètres de Rigidité de Futurs Instruments de Mesure = Determinación de Corredores Biomecánicos Para la Evaluación de Peligros Mecánicos y la Deducción de Parámetros de Rigidez para Futuros Equipos de Medición) (IFA-Report 2022, 2); Deutsche Gesetzliche Unfallversicherung (DGUV): Berlin, Germany, 2022; Available online: https://publikationen.dguv.de/widgets/pdf/download/article/4526 (accessed on 9 October 2023).
- Universal Robots e-Series User Manual—UR10e Original Instructions (en); Universal Robots: Odense, Denmark, 2021.
- LBR iiwa—LBR iiwa 7 R800, LBR iiwa 14 R820—Specification; KUKA Roboters GmbH: Augsburg, Germany, 2018.








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herbster, S.; Behrens, R.; Elkmann, N. Modeling the Contact Force in Constrained Human–Robot Collisions. Machines 2023, 11, 955. https://doi.org/10.3390/machines11100955
Herbster S, Behrens R, Elkmann N. Modeling the Contact Force in Constrained Human–Robot Collisions. Machines. 2023; 11(10):955. https://doi.org/10.3390/machines11100955
Chicago/Turabian StyleHerbster, Sebastian, Roland Behrens, and Norbert Elkmann. 2023. "Modeling the Contact Force in Constrained Human–Robot Collisions" Machines 11, no. 10: 955. https://doi.org/10.3390/machines11100955
APA StyleHerbster, S., Behrens, R., & Elkmann, N. (2023). Modeling the Contact Force in Constrained Human–Robot Collisions. Machines, 11(10), 955. https://doi.org/10.3390/machines11100955