
Robust Control of UAV with Disturbances and Uncertainty Estimation

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
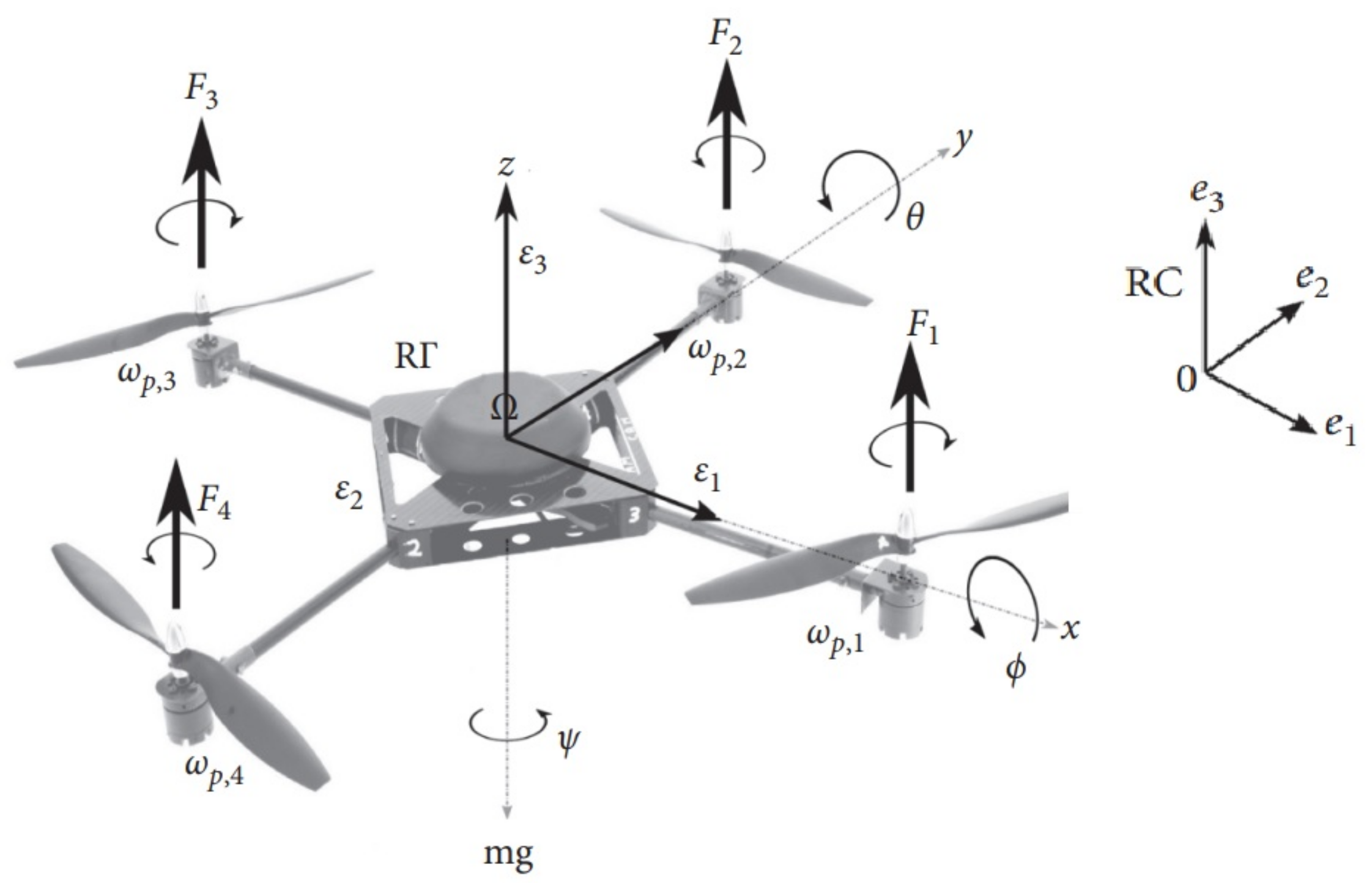
2. Mathematical Model of A Quadrotor
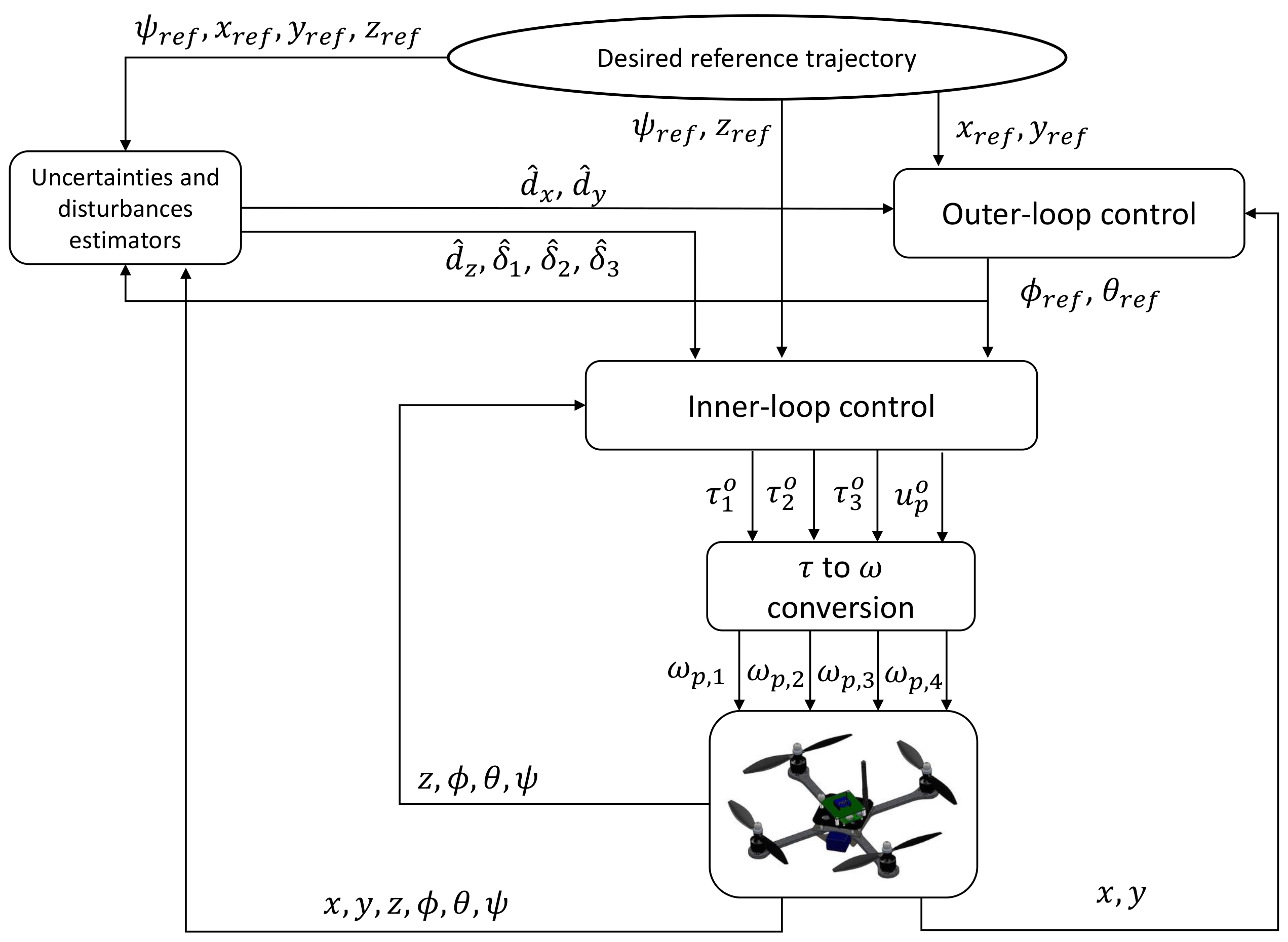
3. Design of Nonlinear Controller
Disturbances Estimator
4. Simulation and Results Analysis
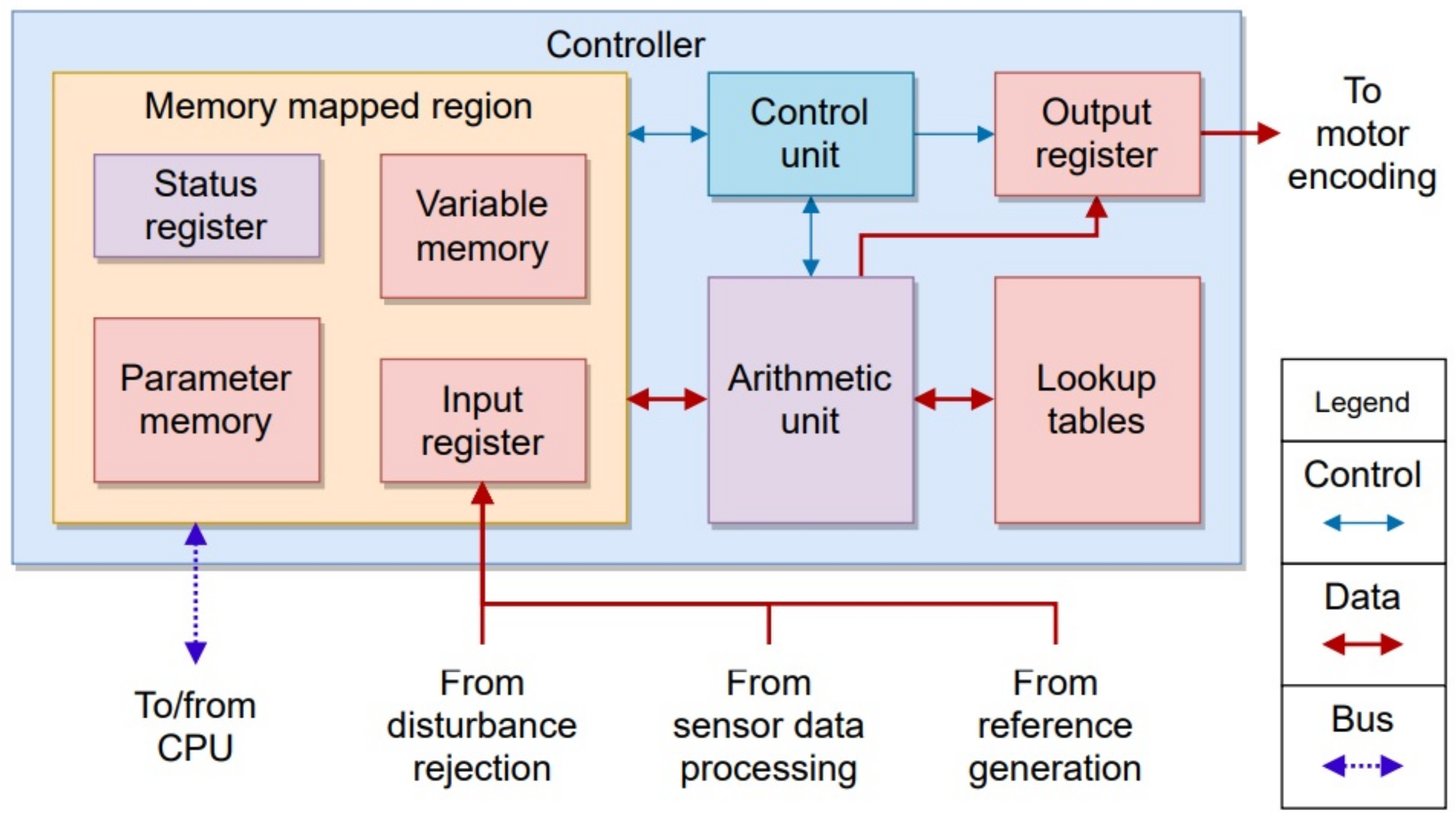
4.1. Co-Simulation Environment with Matlab-Simulink and Simcenter Amesim with FPGA Implementation
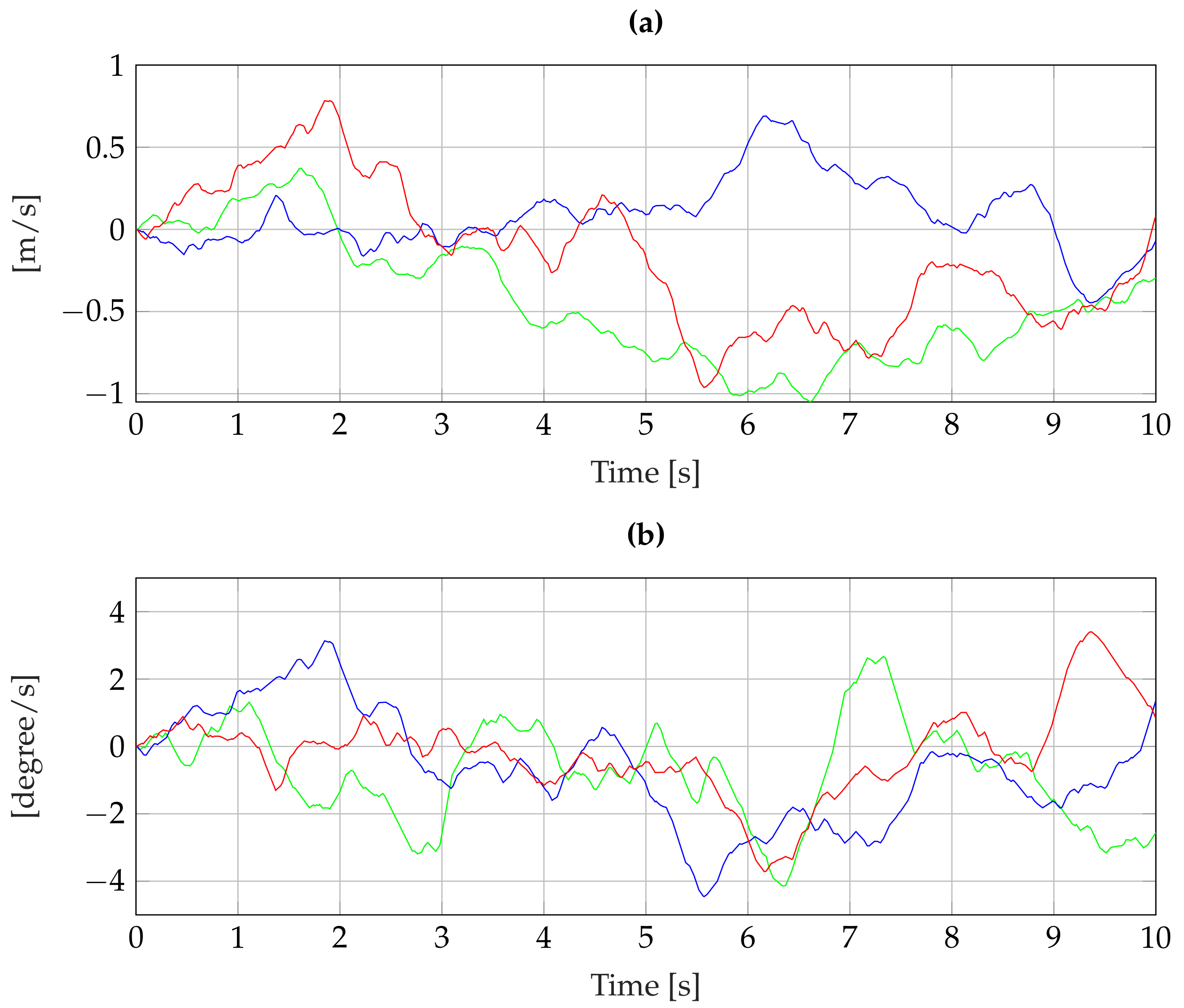
4.2. Environmental Disturbances Acting on the Quadrotor: Wind Modeling
- Constant wind deals with the average wind speed in a specified environment. Constant wind does not exist in nature, because it is only the reference value of the wind speed in a given environment. To perform a more realistic simulation test, other types of wind need to be considered. Generally through statistical data, it is possible to obtain its value in the different temporal or spatial conditions. The numerous relevant websites that log wind data are supportive in this regard. Usually, constant wind is used in simulation tests of UAVs at first, but it is unable to reproduce the flight environment correctly.
- Turbulent flow is a continuous random change, which is always conducted by constant wind. The source of turbulent flow is coupled to many elements, such as wind shear, heat exchange, topographical factors, etc. (see [19]). Stochastic Process Theory is commonly used to describe atmospheric turbulence in engineering applications. Turbulent flow models incorporate the Dryden model and the Von Karman model, both of which depend on a vast amount of measurements and statistics (see [20]). The difference is that Dryden’s model finds the correlation function of turbulence before giving rise to the spectral function, while Von Karman, on the contrary, first establishes the spectral function and then deduces the correlation function of turbulence. From the aforementioned literature, it emerges that between the two models, there is no relevant difference for the application use in the simulation phase; therefore, both can be used within engineering problems designed to simulate the wind.
- Wind shear The American National Research Council defines the degree of wind shear as the ratio of the difference between two wind vectors at two points and the distance between those two points. There are many sources of wind shear. In UAV flight, common low-altitude wind shear contains frontal wind shear, topography-induced wind shear, microdownburst and night jet wind shear. The frequency of the wind shear is also not as large as the turbulent flow, it changes every few seconds as its maximum frequency. The speed of the wind shear is a function of the spatial position, and its model is relatively simple. In the simulation test, the abrupt change in constant wind speed is used to indicate the occurrence of wind shear. Wind shear is a discrete or deterministic wind speed, which often occurs in a very short time, and it is a strong atmospheric perturbation. The wind shear model can be divided into several categories based on its profile geometry, including the rectangular model, the trapezoidal model, and the ’1-consine’ model.
- Propeller vortex is related to large manned aircraft. There are wake vortex caused by aircraft wings that significantly affect other aircraft. As for UAVs, due to their slower flight speed, the propeller vortex will no longer play an important role, while here, another vortex caused by the propellers could be considered, just as the name suggests, but it can be kept in consideration in the modeling phase of the system to be controlled.
The Principle of Wind Affects the UAV
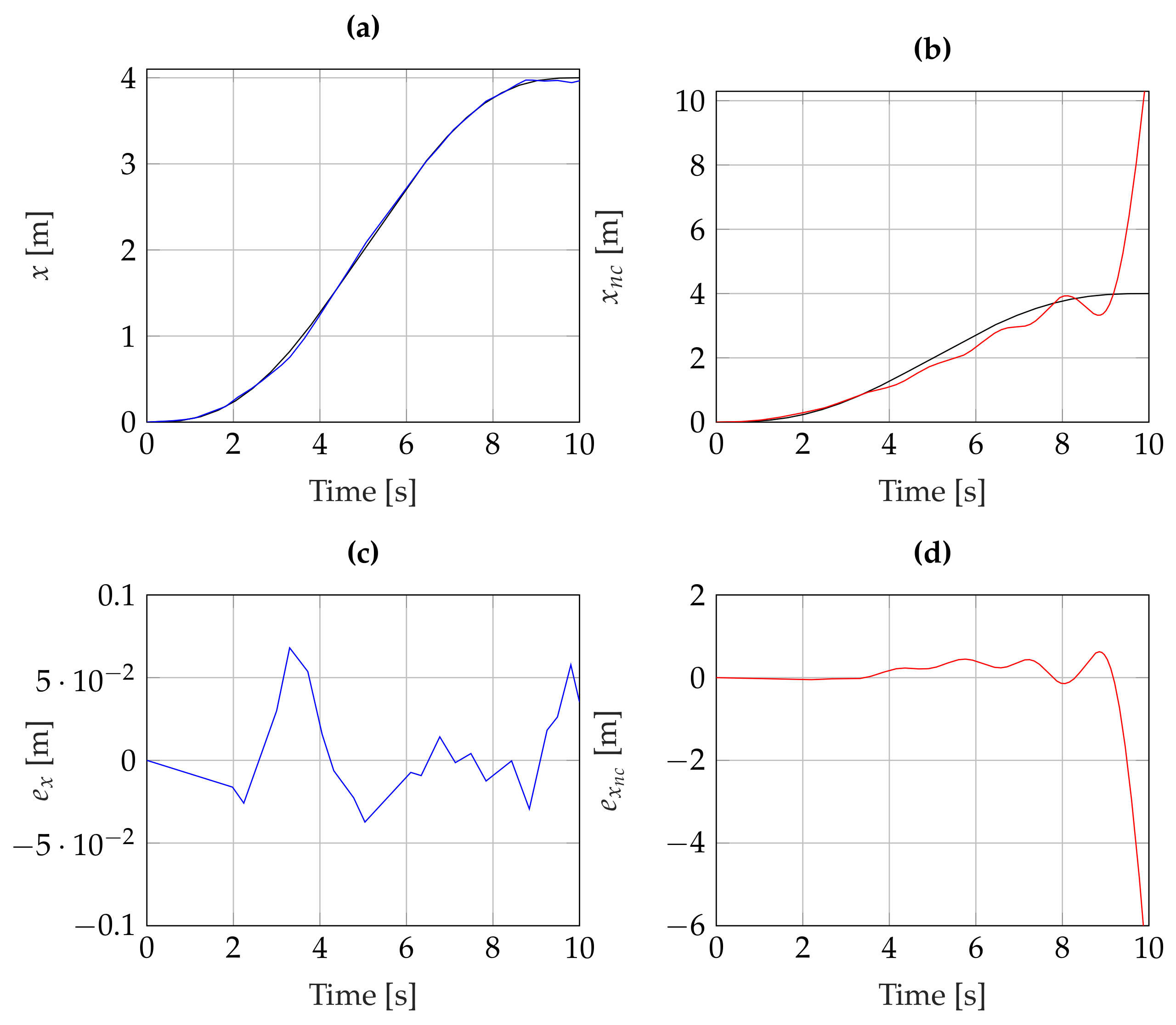
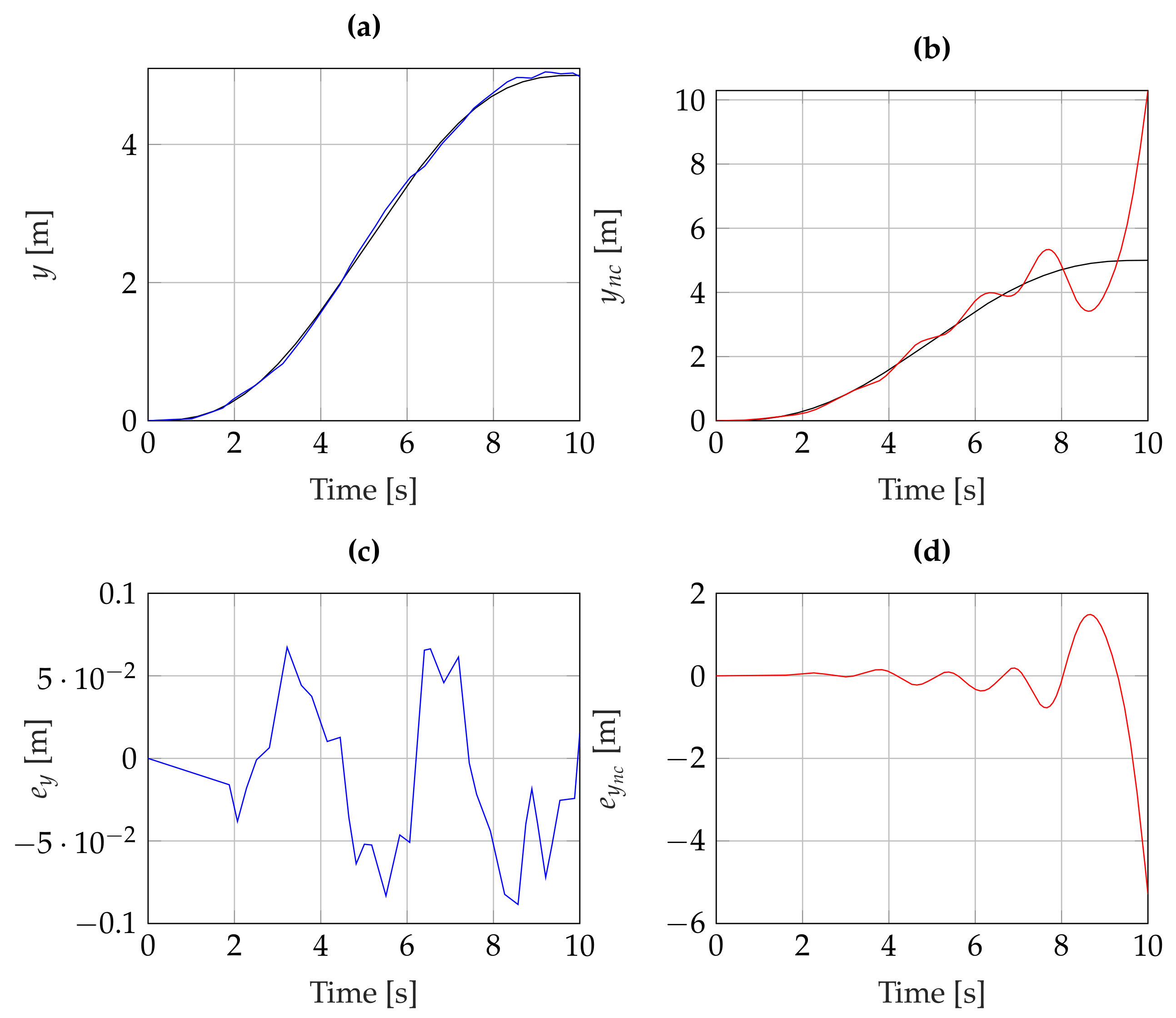
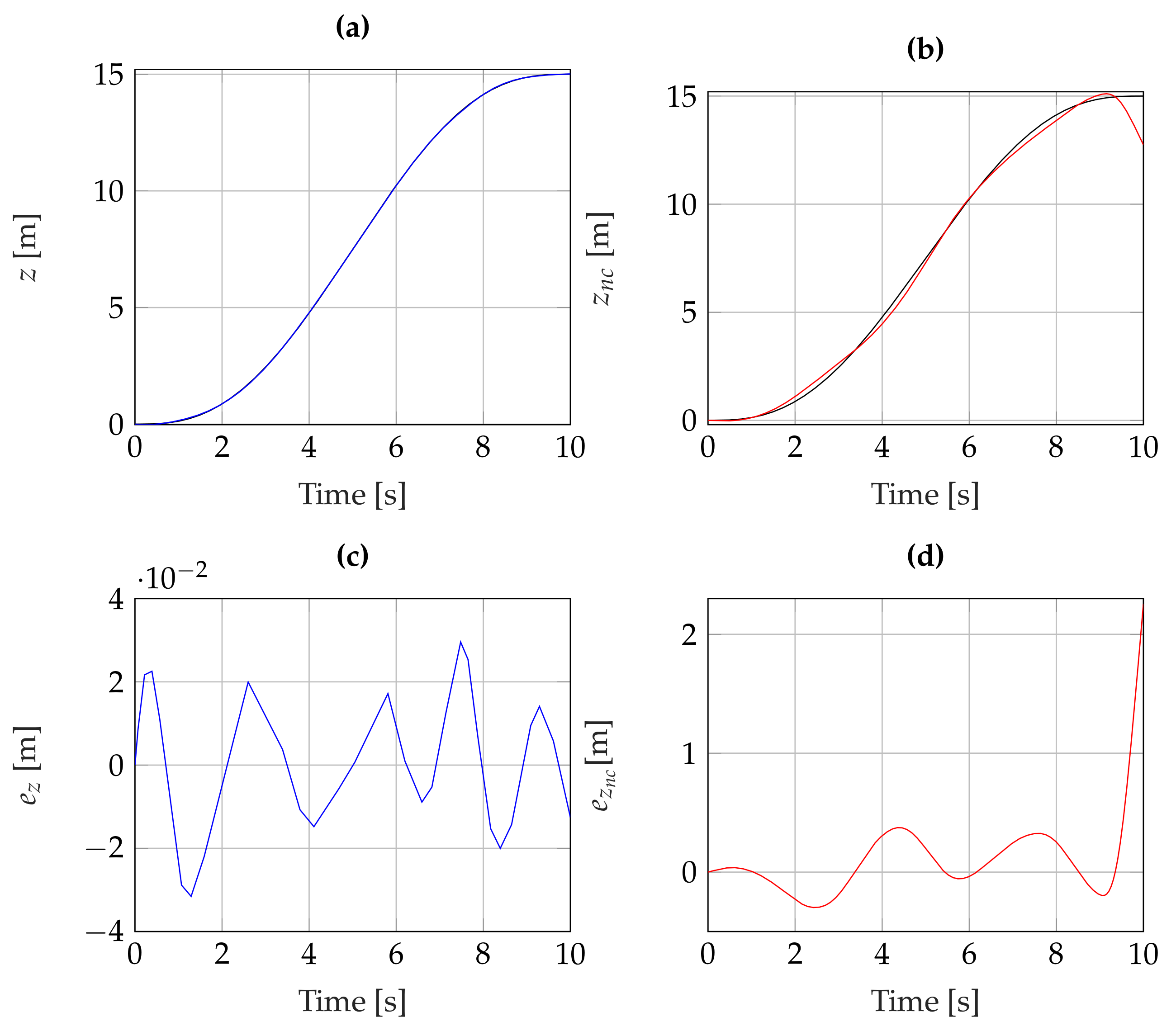
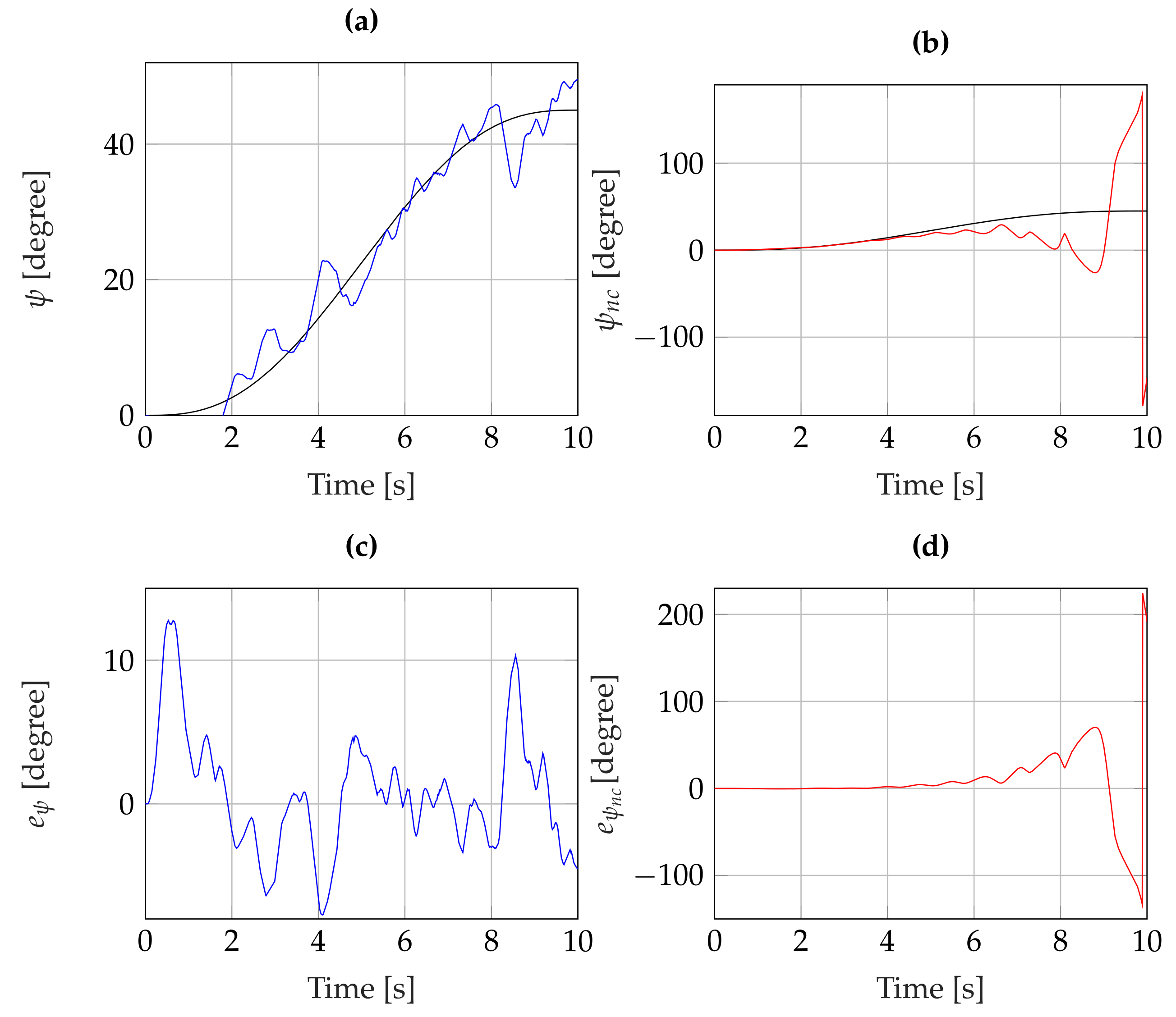
4.3. Simulation Results
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lippitt, C.D.; Zhang, S. The impact of small unmanned airborne platforms on passive optical remote sensing: A conceptual perspective. Int. J. Remote Sens. 2018, 39, 4852–4868. [Google Scholar] [CrossRef]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9, 409–422. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ECSEL JU Project “COMP4DRONES”, 2019–2022. Available online: https://www.comp4drones.eu/ (accessed on 3 January 2023).
- Ding, L.; Wang, Z. A Robust Control for an Aerial Robot Quadrotor under Wind Gusts. J. Robot. Hindawi 2018, 2018, 5607362. [Google Scholar] [CrossRef] [Green Version]
- Ha, L.N.N.T.; Hong, S.K. Robust Dynamic Sliding Mode Control-Based PID–Super Twisting Algorithm and Disturbance Observer for Second-Order Nonlinear Systems: Application to UAVs. Electronics 2019, 8, 760. [Google Scholar] [CrossRef] [Green Version]
- Verberne, J.; Moncayo, H. Robust Control Architecture for Wind Rejection in Quadrotors. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 152–161. [Google Scholar]
- Sankaranarayanan, V.N.; Satpute, S.; Nikolakopoulos, G. Adaptive Robust Control for Quadrotors with Unknown Time-Varying Delays and Uncertainties in Dynamics. Drones 2022, 6, 220. [Google Scholar] [CrossRef]
- Wan, K.; Gao, X.; Hu, Z.; Wu, G. Robust Motion Control for UAV in Dynamic Uncertain Environments Using Deep Reinforcement Learning. Remote Sens. 2020, 12, 640. [Google Scholar] [CrossRef] [Green Version]
- Lúa, C.A.; García, C.C.V.; Di Gennaro, S.; Castillo-Toledo, B.; Morales, M.E.S. Real-Time Hovering Control of Unmanned Aerial Vehicles. J. Math. Probl. Eng. Hindawi 2020, 2020, 2314356. [Google Scholar]
- Guillén-Bonilla, J.T.; García, C.C.V.; Di Gennaro, S.; Morales, M.E.S.; Lúa, C.A. Vision-Based Nonlinear Control of Quadrotors Using the Photogrammetric Technique. Math. Probl. Eng. 2020, 2020, 5146291. [Google Scholar] [CrossRef]
- Hughes, P.C. Spacecraft Attitude Dynamics; Dover Publications, Inc.: Mineola, NY, USA, 1986. [Google Scholar]
- Nagaty, A.; Saeedi, S.; Thibault, C.; Seto, M.; Li, H. Control and Navigation Framework for Quadrotor Helicopters. J. Intell. Robot. Syst. 2013, 70, 1–12. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Birkhauser: New York, NY, USA, 2014. [Google Scholar]
- Fridman, L.; Shtessel, Y.; Edwards, C.; Yan, X.-G. Higher-order sliding-mode observer for state estimation and input reconstruction in nonlinear systems. Int. J. Robust Nonlinear Control. 2008, 18, 399–412. [Google Scholar] [CrossRef]
- Cappuzzo, F.; Dezobry, V.; Bianchi, D.; Di Gennaro, S. A Novel Co-simulation framework for Verification and Validation of GNC Algorithms for Autonomous UAV. In Proceedings of the 78th Vertical Flight Society Annual Forum and Technology Display, FORUM 2022, Fort Worth, TX, USA, 10–12 May 2022. [Google Scholar]
- Nguyen, D.H.; Liu, Y.; Mori, K. Experimental Study for Aerodynamic Performance of Quadrotor Helicopter. Trans. Jpn. Soc. Aeronaut. Space Sci. 2018, 61, 29–39. [Google Scholar] [CrossRef] [Green Version]
- Six, D.; Briot, S.; Erskine, J.; Chriette, A. Identification of the Propeller Coefficients and Dynamic Parameters of a Hovering Quadrotor From Flight Data. IEEE Robot. Autom. Lett. 2020, 5, 1063–1070. [Google Scholar] [CrossRef]
- Wang, B.H.; Wang, D.B.; Ali, Z.A.; Ting, B.T.; Wang, H. An overview of various kinds of wind effects on unmanned aerial vehicle. Meas. Control. 2019, 52, 731–739. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Y.; Jin, C. The Flight Principle in the Atmospheric Disturbance; National Defense Industry Press: Beijing, China, 1993. [Google Scholar]
- Beal, T.R. Digital simulation of atmospheric turbulence for Dryden and von Karman models. J. Guid. Control. Dyn. 1993, 16, 132–138. [Google Scholar] [CrossRef]
- Venkataramanan, S.; Dogan, A.; Blake, W. Vortex effect modelling in aircraft formation flight. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Austin, TX, USA, 11–14 August 2003. [Google Scholar]
- Hakim, T.M.I.; Arifianto, O. Implementation of Dryden Continuous Turbulence Model into Simulink for LSA-02 Flight Test Simulation. Iop Conf. Ser. J. Phys. Conf. Ser. 2018, 1005, 012017. [Google Scholar] [CrossRef]
- Bianchi, D.; Borri, A.; Di Gennaro, S.; Preziuso, M. UAV trajectory control with rule-based minimum-energy reference generation. Proc. Eur. Control. Conf. (ECC) 2022, 1497–1502. [Google Scholar] [CrossRef]
- Mogensen, K.N. Motor-Control considerations for electronic speed control in drones. Analog. Appl. J. Tex. Instrum. 2016. Available online: https://www.ti.com/lit/an/slyt692/slyt692.pdf (accessed on 2 January 2023).
- Yang, G.; Yao, J.; Dong, Z. Neuroadaptive learning algorithm for constrained nonlinear systems with disturbance rejection. Int. J. Robust Nonlinear Control. 2022, 32, 6127–6147. [Google Scholar] [CrossRef]
- Yang, G. Asymptotic tracking with novel integral robust schemes for mismatched uncertain nonlinear systems. Int. J. Robust Nonlinear Control. 2022, 33, 1988–2002. [Google Scholar] [CrossRef]
- Di Ferdinando, M.; Pepe, P.; Di Gennaro, S. A new approach to the design of sampled-data dynamic output feedback stabilizers. IEEE Trans. Autom. Control. 2022, 67, 1038–1045. [Google Scholar] [CrossRef]
- Di Ferdinando, M.; Pepe, P.; Di Gennaro, S. On Semi–Global Exponential Stability Under Sampling for Locally Lipschitz Time–Delay Systems. IEEE Trans. Autom. Control. 2022, 99, 120–131. [Google Scholar] [CrossRef]
- Di Ferdinando, M.; Bianchi, D.; Di Gennaro, S.; Pepe, P. On the Robust Quantized Sampled–Data Leaderless Consensus Tracking of Nonlinear Multi–Agent Systems. In Proceedings of the 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 13–15 December 2021; pp. 3263–3268. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | Mass of the Airframe | 5 kg |
|---|---|---|
| l | Distance of CoG to the rotor shaft | 0.3 m |
| Inertia in the x-axis | 0.011521 kg m | |
| Inertia in the y-axis | 0.0362132 kg m | |
| Inertia in the z-axis | 0.029142 m | |
| Inertia of the propellers | 0.0003 m | |
| g | Gravity acceleration | 9.81 m s |
| b | Trust factor | 4.5625 10 N s rad |
| c | Drag factor | 1.375 10 N s rad m |
| Model | Continuos Dryden (+q −r): Use continuous |
| Type | representation of Dryden velocity |
| spectra with positive vertical | |
| and negative lateral angular rates spectra. | |
| Altitude | z |
| UAV | |
| Velocity | |
| Measured | 15 m/s. |
| wind speed | Measured wind speed at a height of 6 m |
| speed | |
| Wind | 0 |
| direction | Measured wind direction at a height of 6 m |
| (degrees clockwise from north) | |
| to aid in transforming the low-altitude | |
| turbulence model into a body coordinates. | |
| Turbulence | -Light |
| intensity | Probability of the turbulence intensity being exceeded |
| Wingspan | 10 m |
| required in the turbulence calculation on the angular rates. | |
| Band limited | 0.01 s |
| noise sample | Noise sample time at which |
| time | the unit variance white noise signal is generated |
| Noise seeds | (23,341 23,342 23,343 23,344) |
| (ug vg wg pg) | Random noise seeds, specified as a four-element vector one for each |
| of the three velocity components | |
| and one for the roll rate. |
| Controller | Controlled Variable | MAE | MSE | ISE | IAE | ITAE | ITSE |
|---|---|---|---|---|---|---|---|
| Non-robust | x | 0.4312 | 1.3198 | 12.92 | 4.2777 | 35.9148 | 125.34 |
| Robust | x | 0.018 | 0.000063 | 0.0063 | 0.1798 | 0.9743 | 0.0339 |
| Non-robust | y | 0.3867 | 1.3198 | 7.0007 | 3.8442 | 32.3692 | 66.1772 |
| Robust | y | 0.036 | 0.0019 | 0.0196 | 0.3604 | 2.2055 | 0.127 |
| Non-robust | z | 0.216 | 0.1321 | 1.2969 | 2.1505 | 13.9362 | 11.0271 |
| Robust | z | 0.0124 | 0.000021 | 0.0021 | 0.1238 | 0.5591 | 0.0089 |
| Non-robust | 19.3308 | 1492.2 | 1475.3 | 1.9254 | 1655.83 | 138,009 | |
| Robust | 3.0647 | 17.5 | 175.7 | 30.6552 | 1.3336 | 629 |
| Controller | Non-Robust | Robust |
|---|---|---|
| 2.535937464 × | 2.522437042 × | |
| 2.534601465 × | 2.512100166 × | |
| 2.533127333 × | 2.514066778 × | |
| 2.534819281 × | 2.515695169 × | |
| Total | 1.013848554 × | 1.006429915 × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bianchi, D.; Di Gennaro, S.; Di Ferdinando, M.; Acosta Lùa, C. Robust Control of UAV with Disturbances and Uncertainty Estimation. Machines 2023, 11, 352. https://doi.org/10.3390/machines11030352
Bianchi D, Di Gennaro S, Di Ferdinando M, Acosta Lùa C. Robust Control of UAV with Disturbances and Uncertainty Estimation. Machines. 2023; 11(3):352. https://doi.org/10.3390/machines11030352
Chicago/Turabian StyleBianchi, Domenico, Stefano Di Gennaro, Mario Di Ferdinando, and Cuauhtémoc Acosta Lùa. 2023. "Robust Control of UAV with Disturbances and Uncertainty Estimation" Machines 11, no. 3: 352. https://doi.org/10.3390/machines11030352
APA StyleBianchi, D., Di Gennaro, S., Di Ferdinando, M., & Acosta Lùa, C. (2023). Robust Control of UAV with Disturbances and Uncertainty Estimation. Machines, 11(3), 352. https://doi.org/10.3390/machines11030352