

Simple Internal Model-Based Robust Control Design for a Non-Minimum Phase Unmanned Aerial Vehicle


Abstract
:1. Introduction
2. Methodology and Structure of The Paper
2.1. Methodology
2.2. Overview of Constraints Imposed by NMP Zeros on SISO Control Loop Shaping
2.3. Structure of the Paper
3. UAV Platform and Modelling for Control
Modelling for Control
- Pade approx. 1st order of :
- Pade approx. 2nd order of :
- Pade approx. 3rd order of :
- Overall time delay (combined NMP zero approx. as time delay and original time delay):
- Rational approximation of (Taylor expansion) to pure NMP zero:
- Approx. original time delay by first-order Taylor expansion as extra NMP zero:
- Take (5) and represent worst case time delay as slow pole approximation:
- Take and represent only the pure time delay as slow pole approximation:
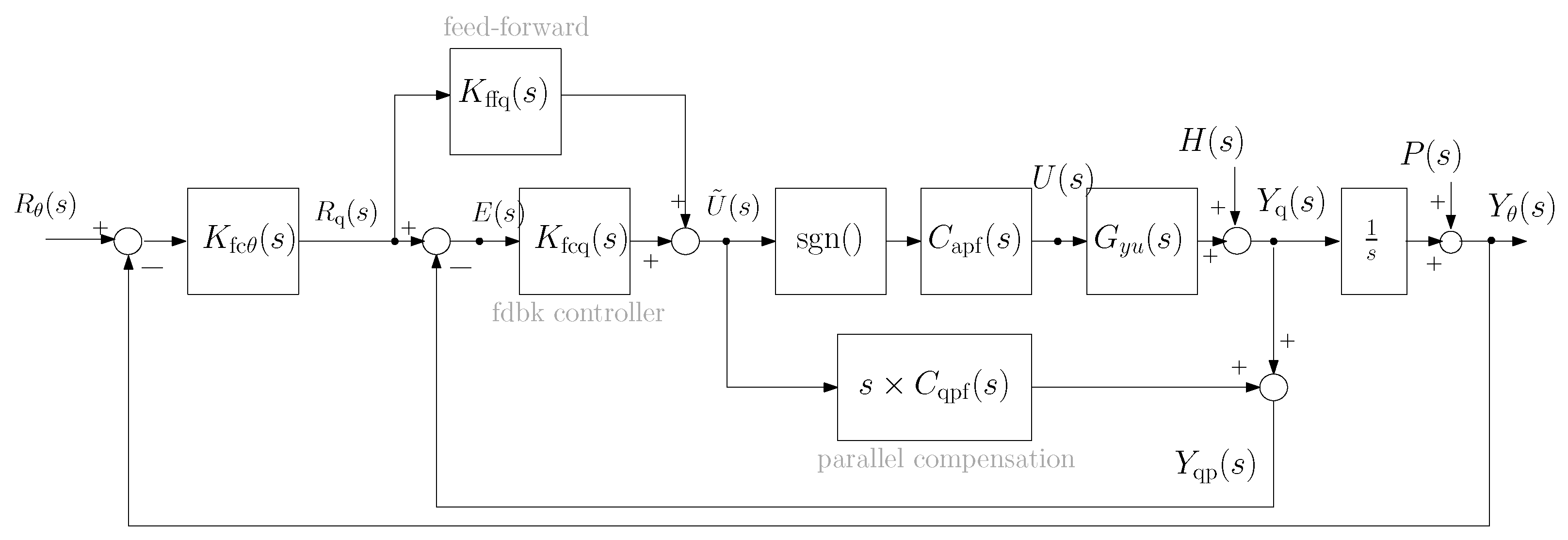
4. The Feedback Control Setup
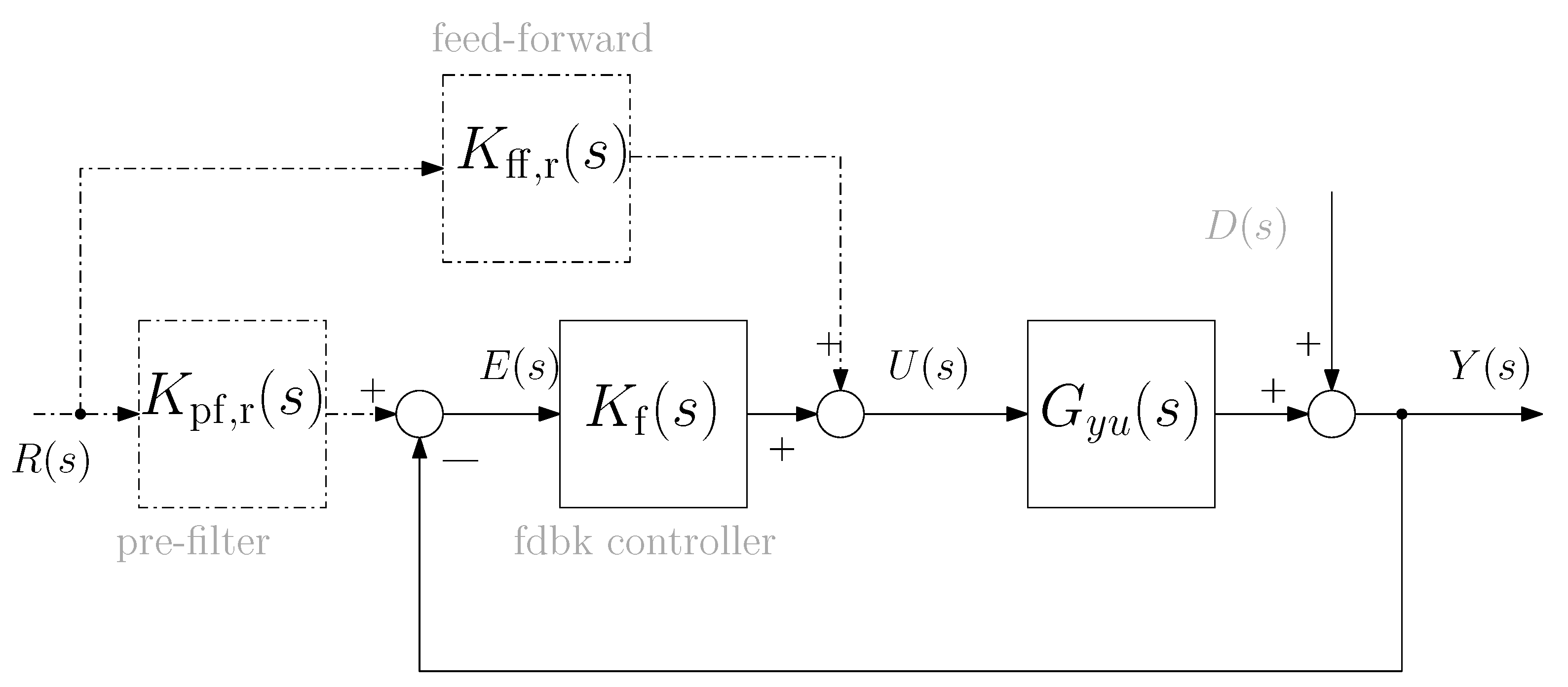
4.1. Generic 2-DoF Control Setup Preliminaries
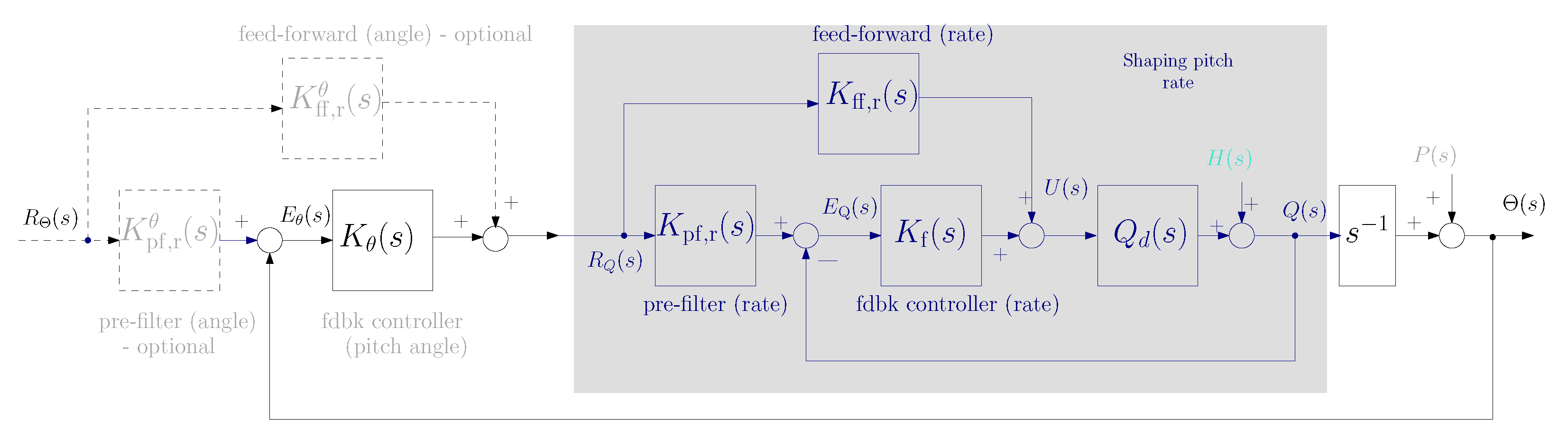
4.2. Proposed Feedback Control Scheme for the UAV Platform Example
4.3. Parallel Feedback Control Design (PFCD) for Comparison
5. Internal Model NMP Zero UAV-Targeted Control Design
5.1. Internal Model Control in a Nutshell
5.2. IMC Control with No Rate Feedback
5.3. IMC Control with Inner Loop (Pitch Rate Feedback) Included
5.3.1. Inner Loop (Pitch Rate)
5.3.2. Outer Loop (Pitch Angle)
Outer Loop Simplest (1-DoF Loop Shaping)
Outer Loop 2-DoF IMC-Based
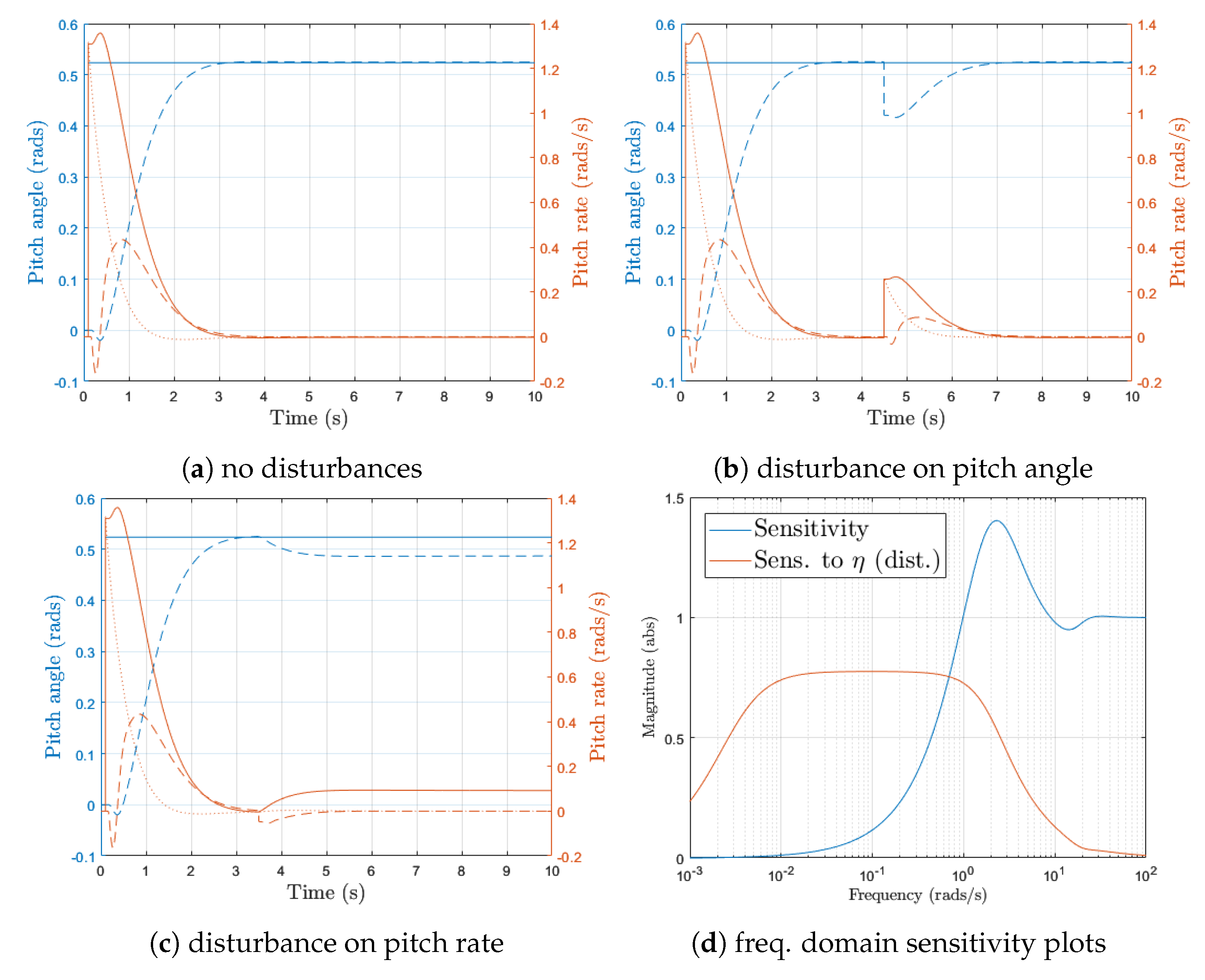
6. Results and Discussion
- The IMC-based controller design for the inner loop (pitch rate) serves as a shaper for the outer loop controller design, both for the simplest loop-shaping approach and for the 2-DoF IMC-based outer loop controller approach. In particular, the pre-filter offers a “virtual” simplified plant TF (under an assumption of perfect control) for the outer loop controller’s design.
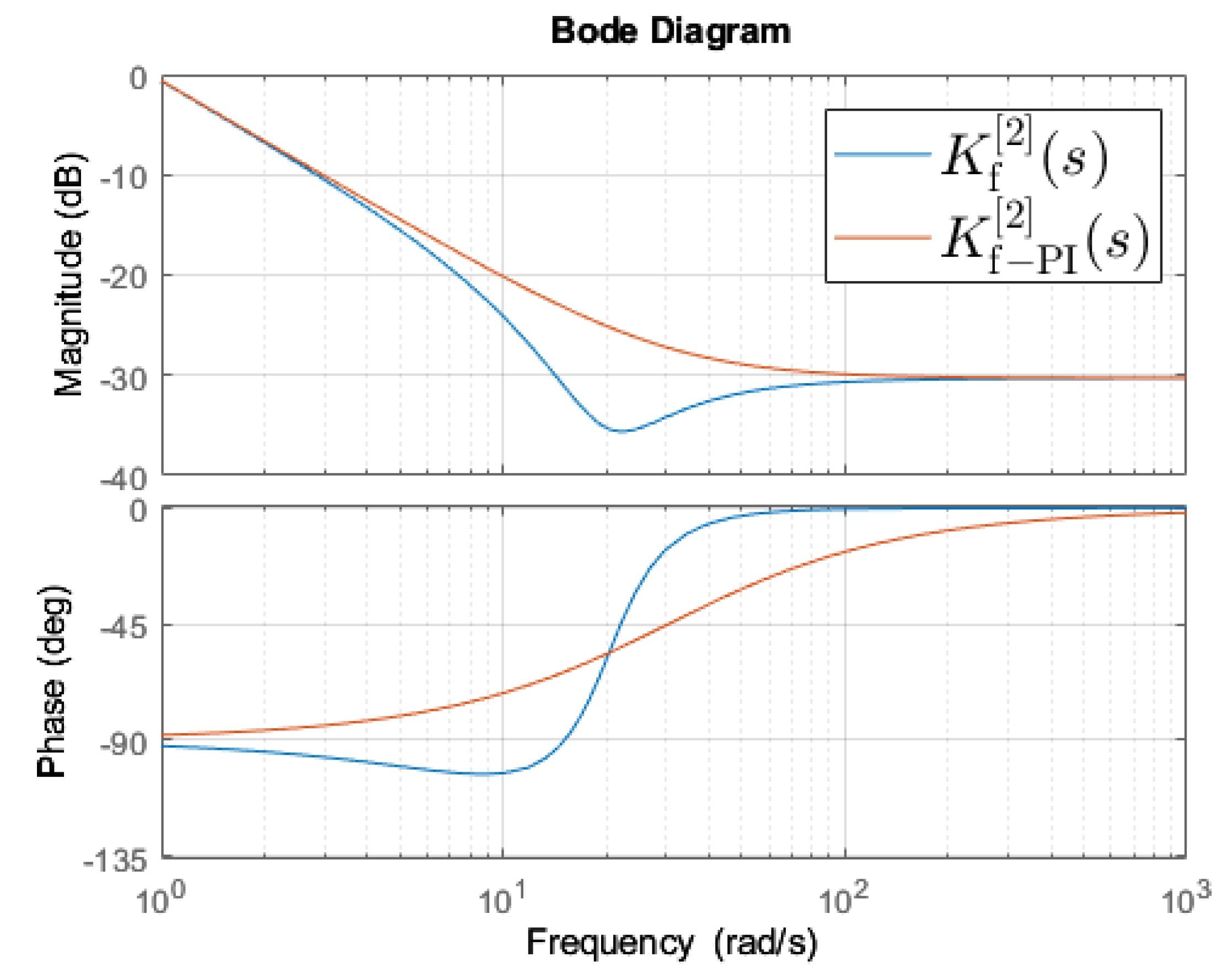
- The plant TF model representation (so-called `modelling for control’) for the IMC-based control design process leads to explainable controller structure (i.e., PID-type, phase-advance type, etc.), and further simplification of the controllers can be achieved by straightforward investigation of their characteristics (as shown in this paper).
- The IMC-based controller design does not necessitate complex optimisation (although it is possible to follow more rigorous optimisation for more complex TF structures).
7. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SISO | Single-Input–Single-Output |
| NMP | Non-minimum phase |
| TF | Transfer function |
| CL, OL | Closed-loop, Open-loop |
| DoF | Degree of Freedom |
| FDBK | Feedback |
| IMC | Internal Model Control |
| PFCD | Parallel Feedback Control Design |
| UAV | Unmanned Aerial Vehicle |
| GM, GRM | Gain margin, Gain reduction margin |
| PM, PRM | Phase margin, Phase reduction margin |
References
- Hoagg, J.B.; Bernstein, D.S. Nonminimum-phase zeros-much to do about nothing-classical control-revisited part II. IEEE Control Syst. Mag. 2007, 27, 45–57. [Google Scholar] [CrossRef]
- Storkaas, E.; Skogestad, S. Controllability Analysis of an Unstable, Non-Minimum Phase Process. In Proceedings of the 16th IFAC World Congress, Prague, Czech Republic, 3–8 July 2005; Volume 38, pp. 592–597. [Google Scholar] [CrossRef]
- Theodoulis, S.; Proff, M. Robust Flight Control Tuning for Highly Agile Missiles. In Proceedings of the AIAA Scitech 2021 Forum, Online, 11–15 & 19–21 January 2021. [Google Scholar] [CrossRef]
- Li, J.H.; Kang, H.; Kim, M.G.; Lee, M.J.; Cho, G.R. Asymptotic Trajectory Tracking of Underactuated Non-Minimum Phase Marine Vessels. IFAC–PapersOnLine 2022, 55, 281–286. [Google Scholar] [CrossRef]
- Hassan, F.; Zolotas, A. Impact of fractional order methods on optimized tilt control for rail vehicles. Fract. Calc. Appl. Anal. 2017, 20, 765–789. [Google Scholar] [CrossRef]
- Åström, K. Limitations on Control System Performance. Eur. J. Control 2000, 6, 2–20. [Google Scholar] [CrossRef]
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0. Drones 2022, 6, 177. [Google Scholar] [CrossRef]
- Shakeel, T.; Arshad, J.; Jaffery, M.H.; Rehman, A.U.; Eldin, E.T.; Ghamry, N.A.; Shafiq, M. A Comparative Study of Control Methods for X3D Quadrotor Feedback Trajectory Control. Appl. Sci. 2022, 12, 9254. [Google Scholar] [CrossRef]
- Safwat, E.; Zhang, W.; Mohsen, A.; Kassem, M. Design and Analysis of a Robust UAV Flight Guidance and Control System Based on a Modified Nonlinear Dynamic Inversion. Appl. Sci. 2019, 9, 3600. [Google Scholar] [CrossRef]
- Wang, H.; Li, Z.; Xiong, H.; Nian, X. Robust H-infinity attitude tracking control of a quadrotor UAV on SO(3) via variation-based linearization and interval matrix approach. ISA Trans. 2019, 87, 10–16. [Google Scholar] [CrossRef]
- Sir Elkhatem, A.; Engin, S.N.; Pasha, A.A.; Rahman, M.M.; Pillai, S.N. Robust Control for Non-Minimum Phase Systems with Actuator Faults: Application to Aircraft Longitudinal Flight Control. Appl. Sci. 2021, 11, 11705. [Google Scholar] [CrossRef]
- Yang, J.H.; Xu, H.K. Robust Controller Design for Non-Minimum Phase UAV System and System Analysis. IEEE Access 2018, 6, 70734–70769. [Google Scholar] [CrossRef]
- Li, Y.; Qin, Y.; Xu, W.; Zhang, F. Modeling, Identification, and Control of Non-minimum Phase Dynamics of Bi-copter UAVs. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 1249–1255. [Google Scholar] [CrossRef]
- Saxena, S.; Hote, Y.V. Advances in internal model control technique: A review and future prospects. IETE Tech. Rev. 2012, 29, 461–472. [Google Scholar] [CrossRef]
- Chiu, M.S.; Arkun, Y. Parametrization of all stabilizing IMC controllers for unstable plants. Int. J. Control 1990, 51, 329–340. [Google Scholar] [CrossRef]
- Rivera, D.E.; Flores, M.E. Internal model control. Control Syst. Robot. Autom. 2009, 2, 80–108. [Google Scholar]
- Zhou, K. A natural approach to high performance robust control: Another look at Youla parameterization. In Proceedings of the SICE 2004 Annual Conference, Sapporo, Japan, 4–6 August 2004; Volume 1, pp. 869–874. [Google Scholar]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Picariello, F.; Tudosa, I. Sensors and Measurements for UAV Safety: An Overview. Sensors 2021, 21, 8253. [Google Scholar] [CrossRef] [PubMed]
- Valavanis, K.P.; Vachtsevanos, G.J. (Eds.) Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Šoberl, D.; Bratko, I.; Žabkar, J. Learning to Control a Quadcopter Qualitatively. J. Intell. Robot. Syst. 2020, 100, 1097–1110. [Google Scholar] [CrossRef]
- Pukacz, A.; Kabziński, J. Control of Unmanned Aerial Vehicles with Non-Minimum Phase Dynamics Using Parallel Differential Compensation. In Proceedings of the 2022 26th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 22–25 August 2022; pp. 70–75. [Google Scholar] [CrossRef]
- Saengphet, W.; Tantrairatn, S.; Thumtae, C.; Srisertpol, J. Implementation of system identification and flight control system for UAV. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 22–24 April 2017; pp. 678–683. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef]
- Bequette, B.W. Process Control: Modeling, Design, and Simulation; Prentice Hall Professional: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Lang, G.; Ham, J. Conditional feedback systems-A new approach to feedback control. Trans. Am. Inst. Electr. Eng. Part II Appl. Ind. 1955, 74, 152–161. [Google Scholar] [CrossRef]
- Faanes, A.; Skogestad, S. Feedforward control under the presence of uncertainty. Eur. J. Control 2004, 10, 30–46. [Google Scholar] [CrossRef]
- Noury, K.; Yang, B. Analytical Statistical Study of Linear Parallel Feedforward Compensators for Nonminimum-Phase Systems. In Proceedings of the Dynamic Systems and Control Conference, Park City, UT, USA, 8–11 October 2019; Volume 1. [Google Scholar] [CrossRef]
- Wang, Q.G.; Hang, C.C.; Yang, X.P. Single-loop controller design via IMC principles. Automatica 2001, 37, 2041–2048. [Google Scholar] [CrossRef]
- Bin, H.; Zheng, P.; Liang, J. Multi-loop internal model controller design based on a dynamic PLS framework. Chin. J. Chem. Eng. 2010, 18, 277–285. [Google Scholar]
- Azar, A.T.; Serrano, F.E. Robust IMC–PID tuning for cascade control systems with gain and phase margin specifications. Neural Comput. Appl. 2014, 25, 983–995. [Google Scholar] [CrossRef]
- Ghousiya Begum, K.; Seshagiri Rao, A.; Radhakrishnan, T. Enhanced IMC based PID controller design for non-minimum phase (NMP) integrating processes with time delays. ISA Trans. 2017, 68, 223–234. [Google Scholar] [CrossRef] [PubMed]
- Vilanova, R.; Arrieta, O.; Ponsa, P. IMC based feedforward controller framework for disturbance attenuation on uncertain systems. ISA Trans. 2009, 48, 439–448. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; He, Z.F.; Qi, X. A new control method for MIMO first order time delay non-square systems. J. Process Control 2011, 21, 538–546. [Google Scholar] [CrossRef]
- De Keyser, R.; Copot, C.; Hernandez, A.; Ionescu, C. Discrete-time internal model control with disturbance and vibration rejection. J. Vib. Control 2017, 23, 3–15. [Google Scholar] [CrossRef]
- Henson, M.A.; Seborg, D.E. An internal model control strategy for nonlinear systems. AIChE J. 1991, 37, 1065–1081. [Google Scholar] [CrossRef]
- Ping, Z.; Wang, T.; Huang, Y.; Wang, H.; Lu, J.G.; Li, Y. Internal Model Control of PMSM Position Servo System: Theory and Experimental Results. IEEE Trans. Ind. Informatics 2019, 16, 2202–2211. [Google Scholar] [CrossRef]
- Yang, Q.; Chi, Z.; Wang, L. Uncertainty Analysis of Suspension System Caused by Horizontal Misalignment and Its Suppression Method. Machines 2022, 10, 977. [Google Scholar] [CrossRef]
- Rivera, D.E.; Morari, M. Internal Model Control Perspectives on Model Reduction. In Proceedings of the 1985 American Control Conference, Boston, MA, USA, 19–21 June 1985; pp. 1293–1298. [Google Scholar] [CrossRef]
- Bouzid, Y.; Siguerdidjane, H.; Zareb, M.; Bestaoui, Y. Improved IMC-Filter Design to IMC-PI Equivalence: Application to Quadrotor. IFAC-PapersOnLine 2019, 52, 158–163. [Google Scholar] [CrossRef]
- Olayinka, T.O.; Olatide, A.A.; Oluwagbemiga, A.D.; Okelola, M.O. Internal Model Control Tuned Proportional Integral Derivative for Quadrotor Unmanned Aerial Vehicle Dynamic Model. Control. Theory Inform. (IISTE) 2020, 9, 1–10. [Google Scholar]
- Gao, Q.; Du, M.; Ji, Y. The controller design of quadrotor UAV based on internal model control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 505–510. [Google Scholar] [CrossRef]
- Chen, P.; Zhang, Y.; Wang, J.; Azar, A.T.; Hameed, I.A.; Ibraheem, I.K.; Kamal, N.A.; Abdulmajeed, F.A. Adaptive Internal Model Control Based on Parameter Adaptation. Electronics 2022, 11, 3842. [Google Scholar] [CrossRef]
- Chia, T.L.; Lefkowitz, I. Internal model-based control for integrating processes. ISA Trans. 2010, 49, 519–527. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Response Indexes | |||||
|---|---|---|---|---|---|
| TF | OS/US | PM | GM | ||
| [%] | [sec] | [sec] | [deg] | [dB] | |
| 84.6 OS | 0.812 | 0.025 | −115@109 rad/s | −[email protected] rad/s | |
| 77.8 OS | 0.802 | 0.203 | 133@109 rad/s | −[email protected] rad/s | |
| 84.4 OS | 0.822 | 0.188 | 19.2@109 rad/s | 1.8@133 rad/s | |
| 84.8 OS | 0.812 | 0.206 | −58.1@109 rad/s | −2.48 @83.9 rad/s | |
| 32.6 OS | 0.763 | 0.067 | [email protected] rad/s | [email protected] rad/s | |
| 111 US | 0.765 | 0.02 | −83@151 rad/s | −[email protected] rad/s | |
| 313 OS | 0.802 | - | - | −[email protected] rad/s | |
| - | 0.88 | 0.447 | [email protected] rad/s | [email protected] rad/s | |
| 38 OS | 0.662 | 0.043 | −[email protected] rad/s | −[email protected] rad/s | |
| Controller Schemes | ||||
|---|---|---|---|---|
| Metrics | IMC–s | IMC–i | LS–i | PFCD |
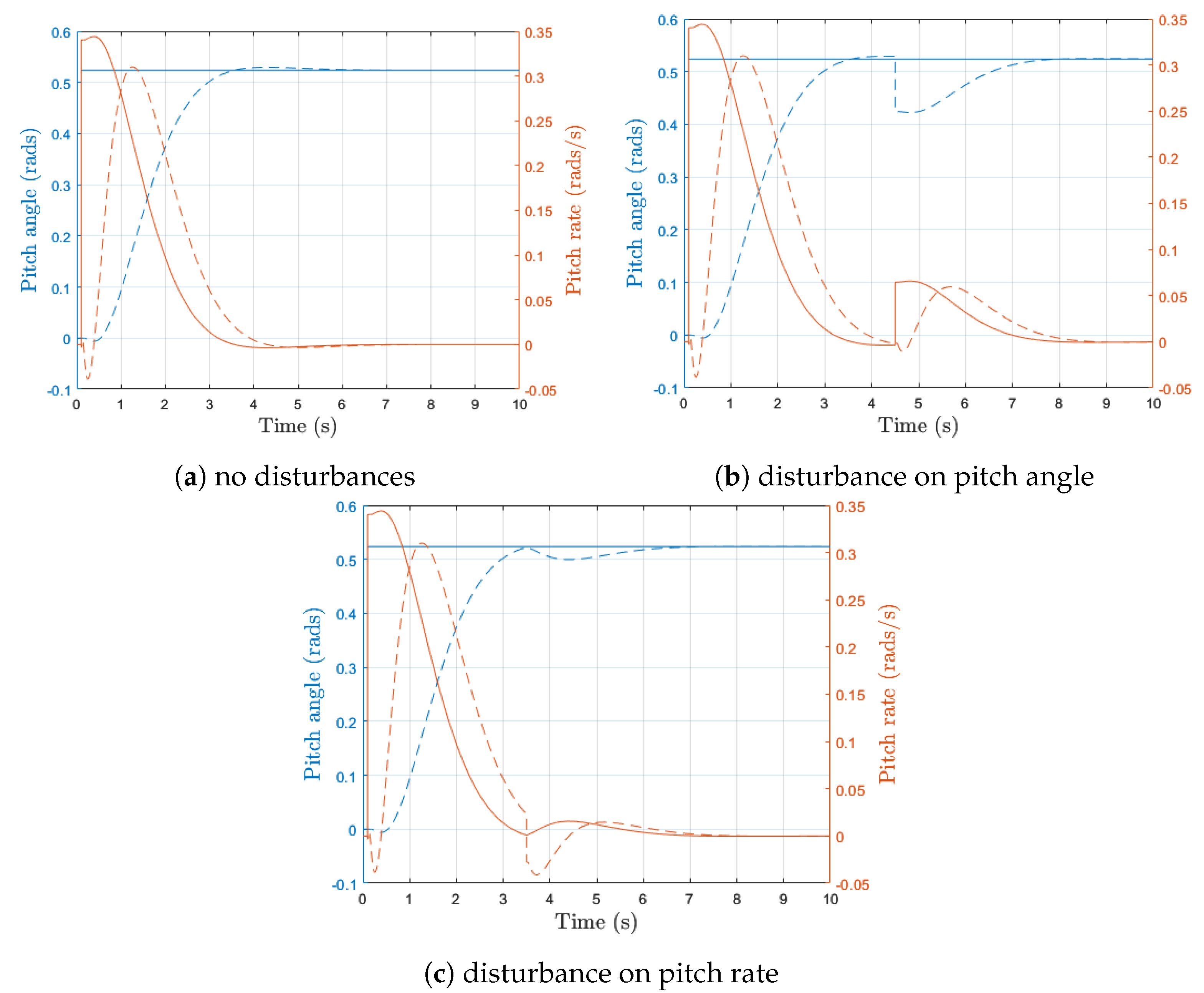
| (settling time, sec) | 2.19 | 2.168 | 3.21 | 2.641 |
| Undershoot peak | −0.07 | −0.007 | −0.006 | −0.02 |
| Overshoot peak | 0.5236 | 0.534 | 0.529 | 0.525 |
| (zero cross time, sec) | 0.4 | 0548 | 0.539 | 0.491 |
| Disturbance rejection (det.) | Y | Y | Y | N |
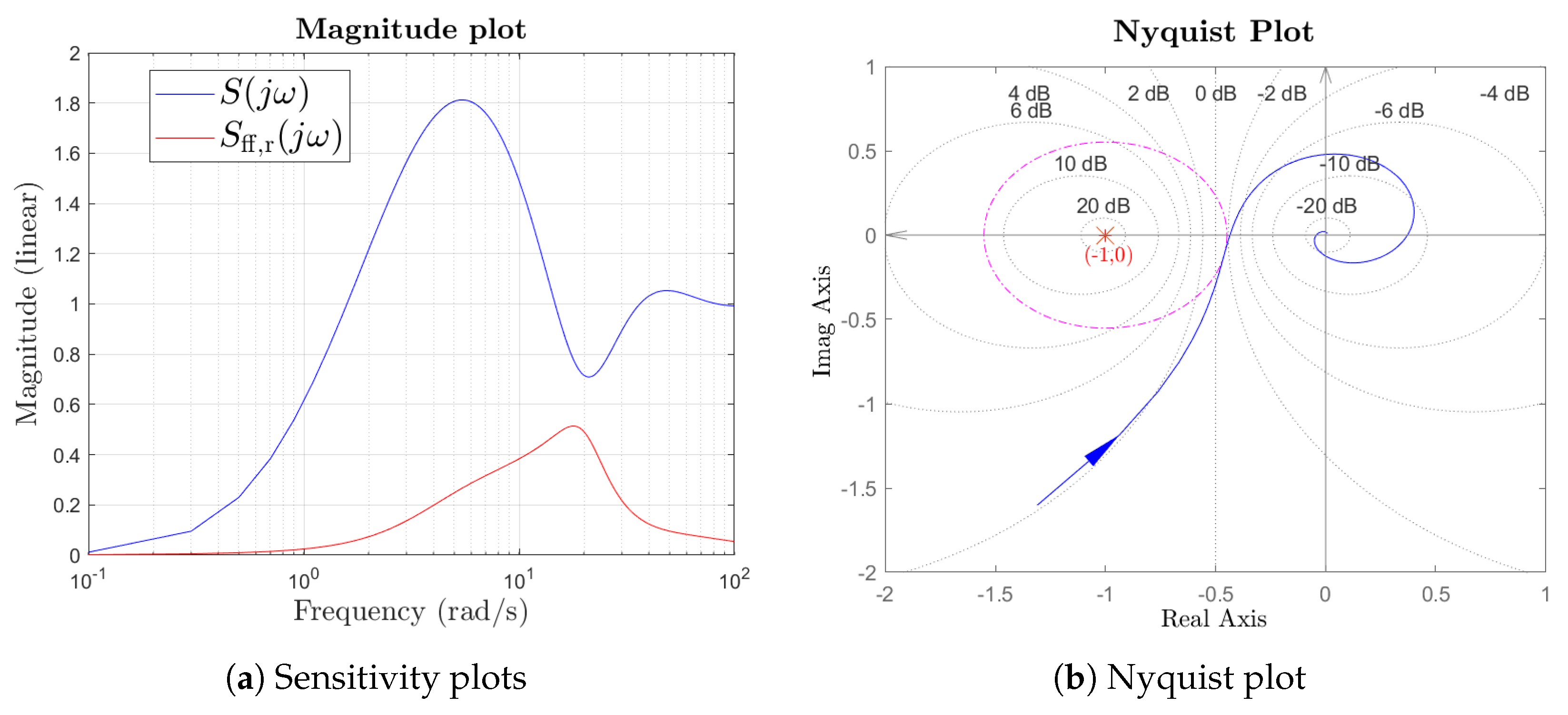
| Sensitivity peak (abs) | 1.81 | 1.69 | 1.42 | 1.4 |
| s.s. error (tracking) | 0 | 0 | 0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zolotas, A. Simple Internal Model-Based Robust Control Design for a Non-Minimum Phase Unmanned Aerial Vehicle. Machines 2023, 11, 498. https://doi.org/10.3390/machines11040498
Zolotas A. Simple Internal Model-Based Robust Control Design for a Non-Minimum Phase Unmanned Aerial Vehicle. Machines. 2023; 11(4):498. https://doi.org/10.3390/machines11040498
Chicago/Turabian StyleZolotas, Argyrios. 2023. "Simple Internal Model-Based Robust Control Design for a Non-Minimum Phase Unmanned Aerial Vehicle" Machines 11, no. 4: 498. https://doi.org/10.3390/machines11040498
APA StyleZolotas, A. (2023). Simple Internal Model-Based Robust Control Design for a Non-Minimum Phase Unmanned Aerial Vehicle. Machines, 11(4), 498. https://doi.org/10.3390/machines11040498