_Zhang.png)


Dynamic Modeling and Performance Evaluation of a 5-DOF Hybrid Robot for Composite Material Machining

Abstract
:1. Introduction
2. Inverse Kinematic Analysis
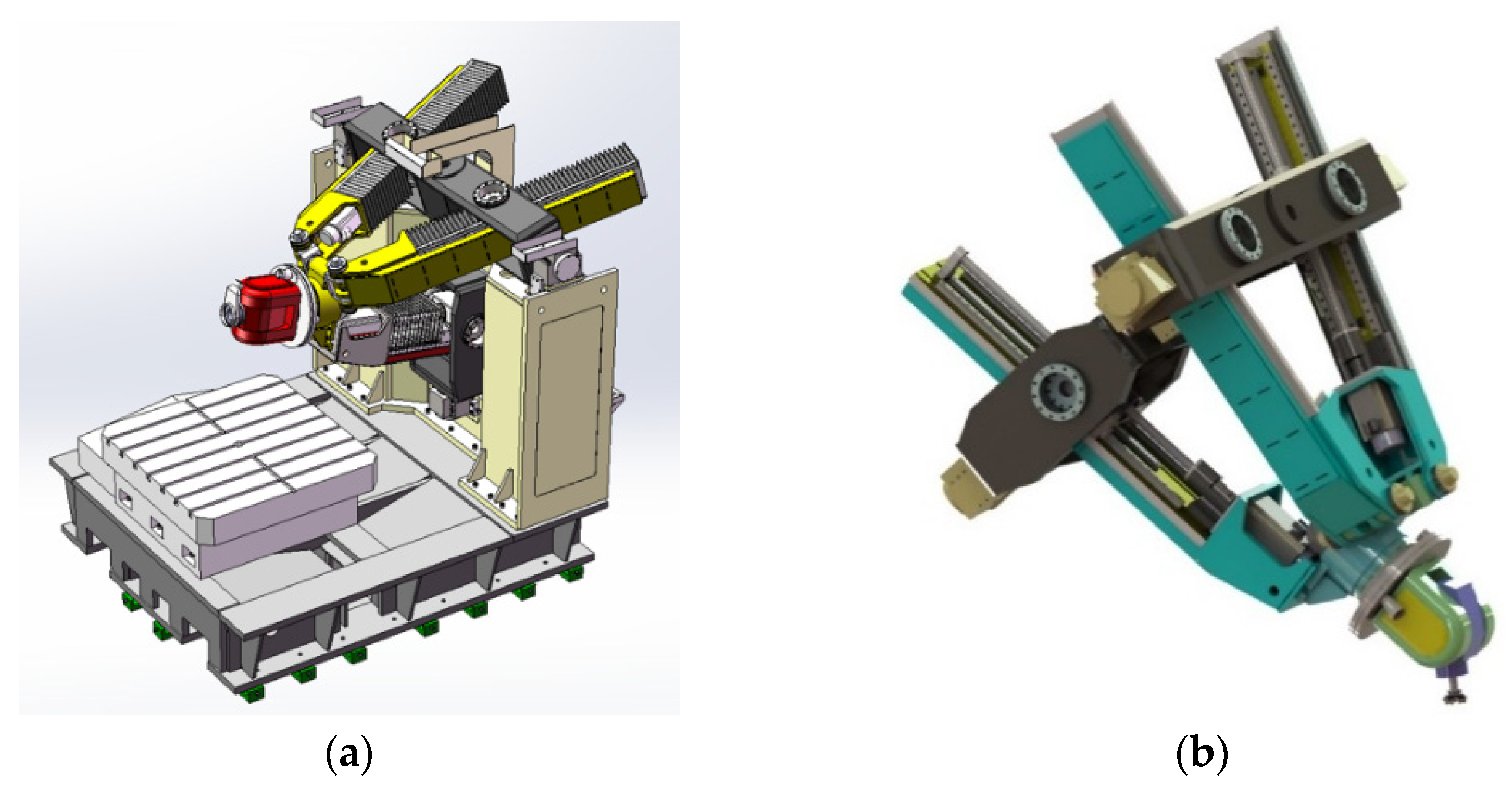
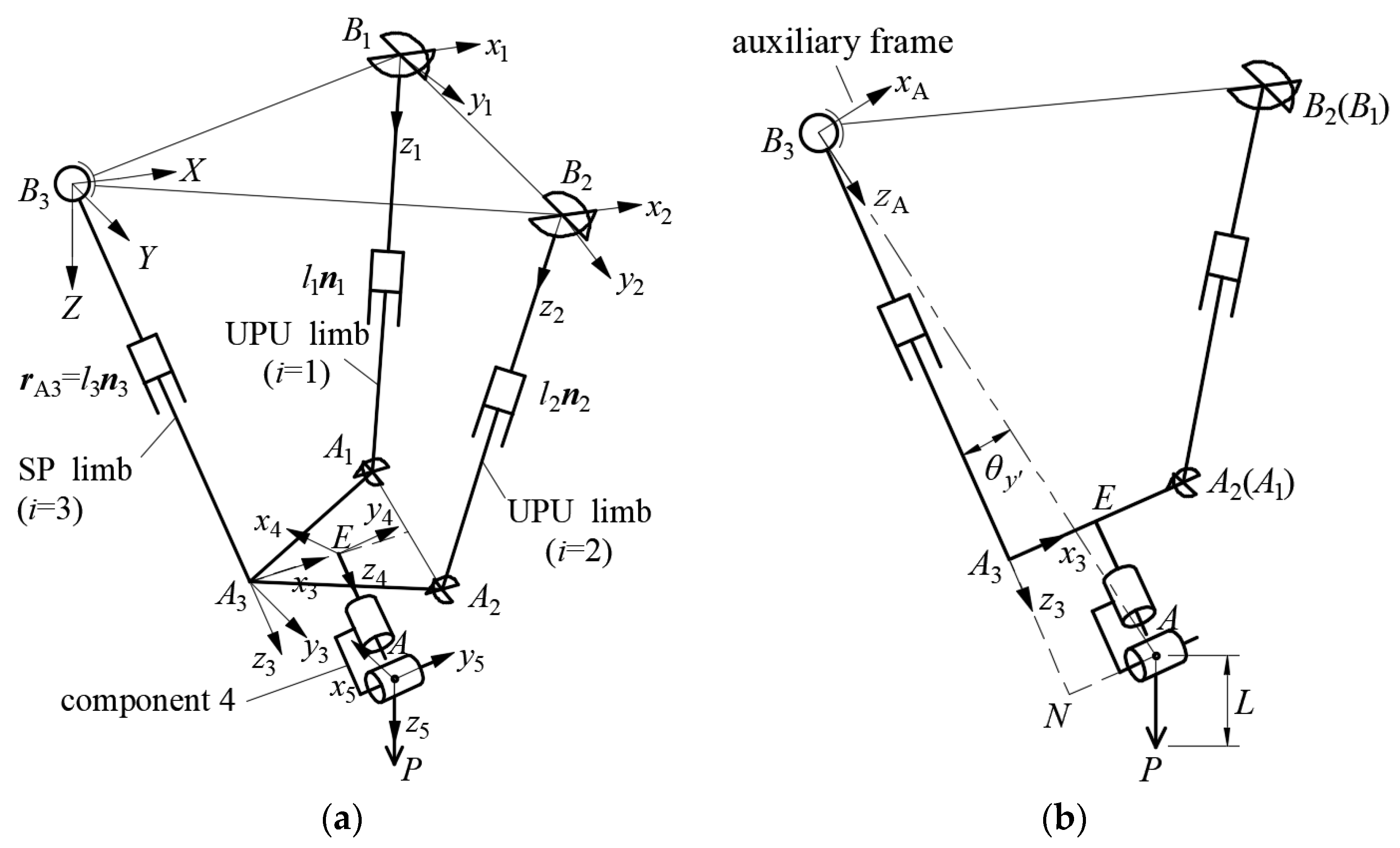
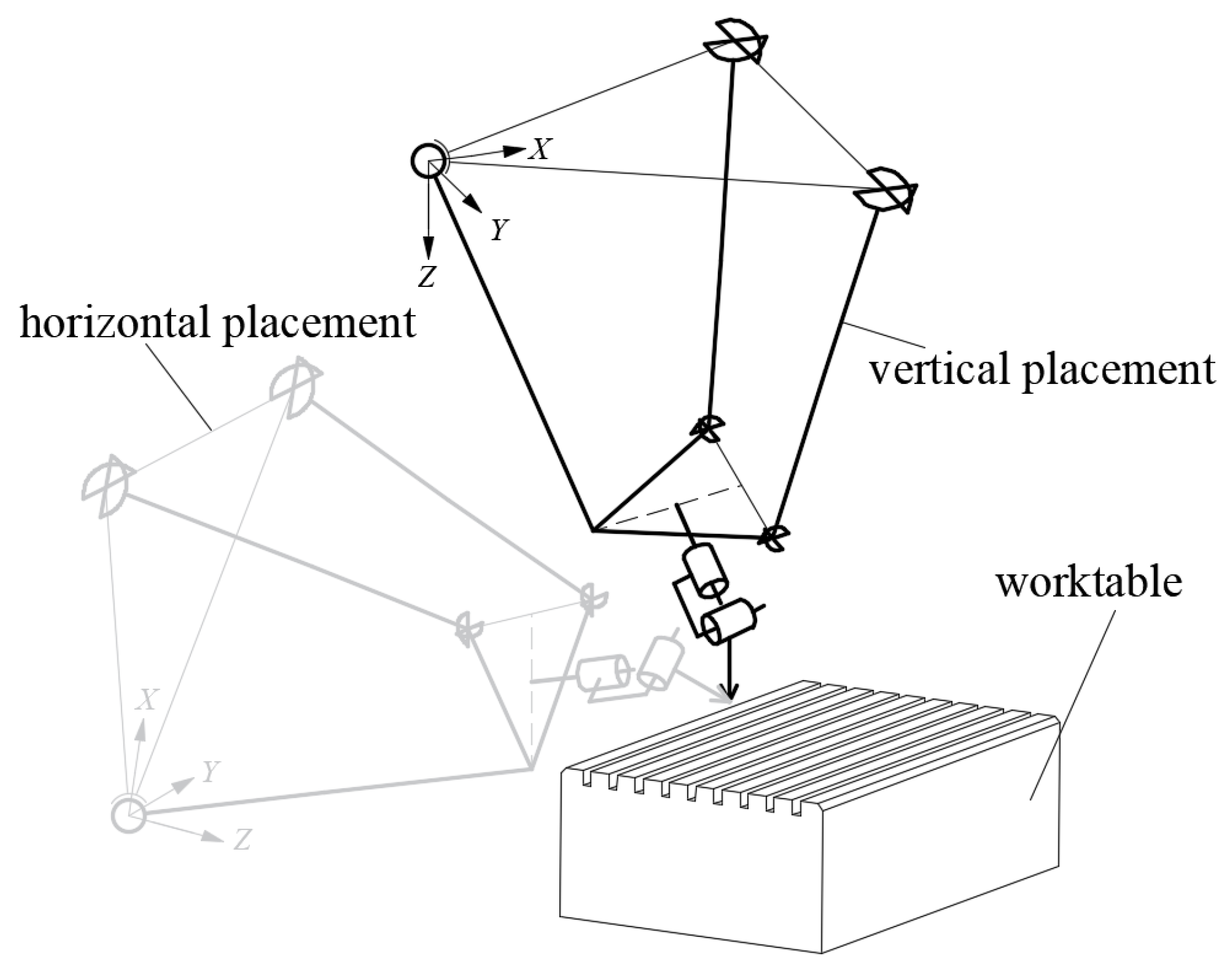
2.1. Structure Description
2.2. Inverse Position Analysis
2.2.1. Position Analysis of the Parallel Mechanism
2.2.2. Position Analysis of the Rotating Head
2.3. Inverse Velocity Analysis
2.3.1. Velocity Analysis of the Parallel Mechanism
2.3.2. Velocity Analysis of the Rotating Head
2.4. Inverse Acceleration Analysis
3. Inverse Dynamic Analysis

4. Dynamic Performance Evaluation
4.1. Dynamic Performance Indices
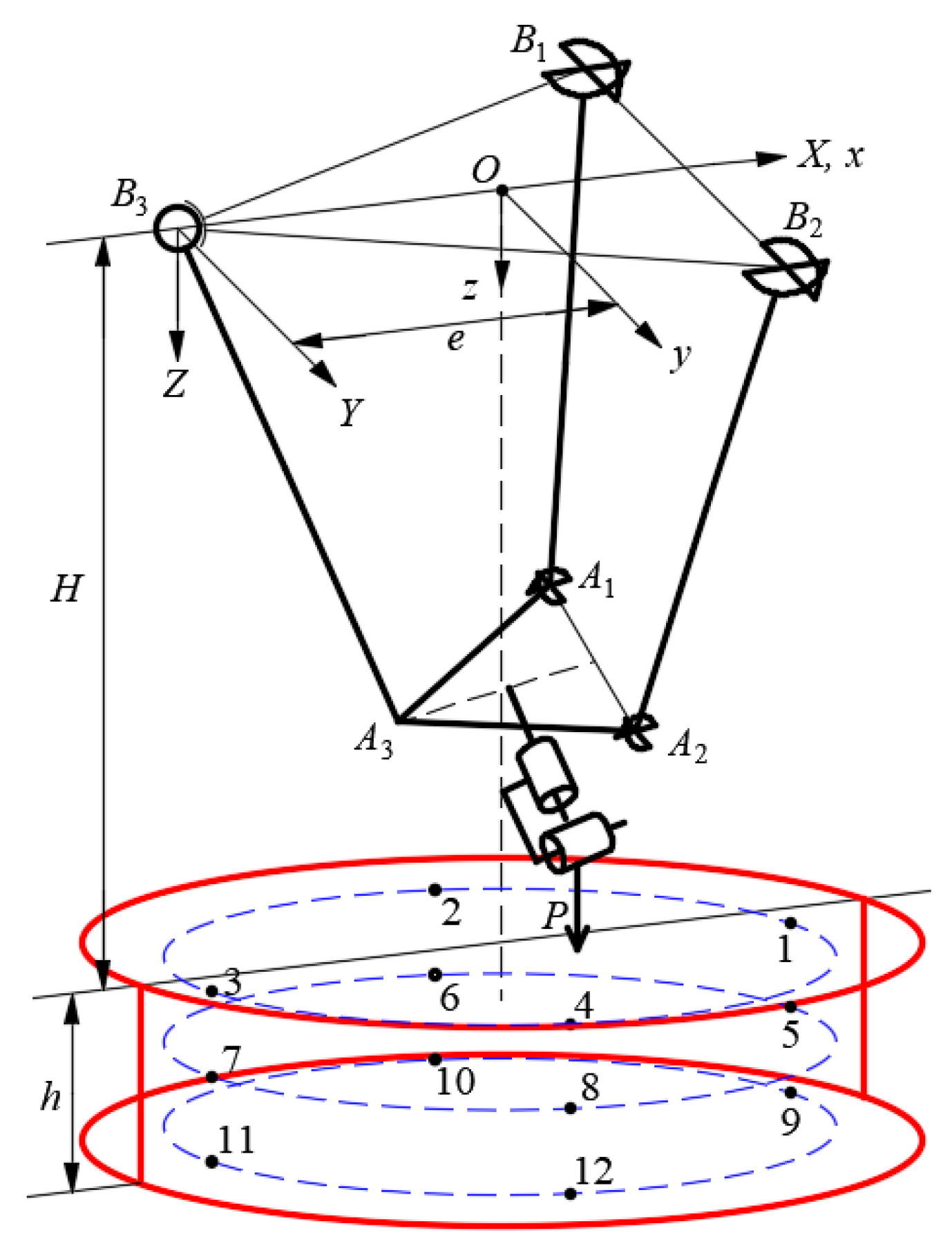
4.2. Task Space and Motion Range of the Hybrid Robot
5. Dynamic Performance Comparison
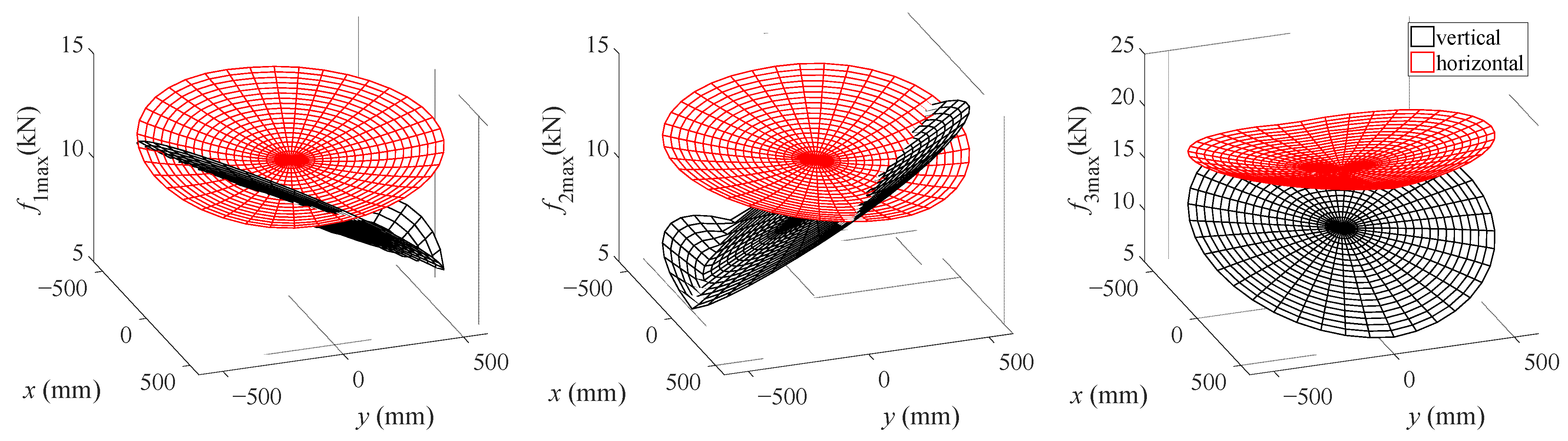
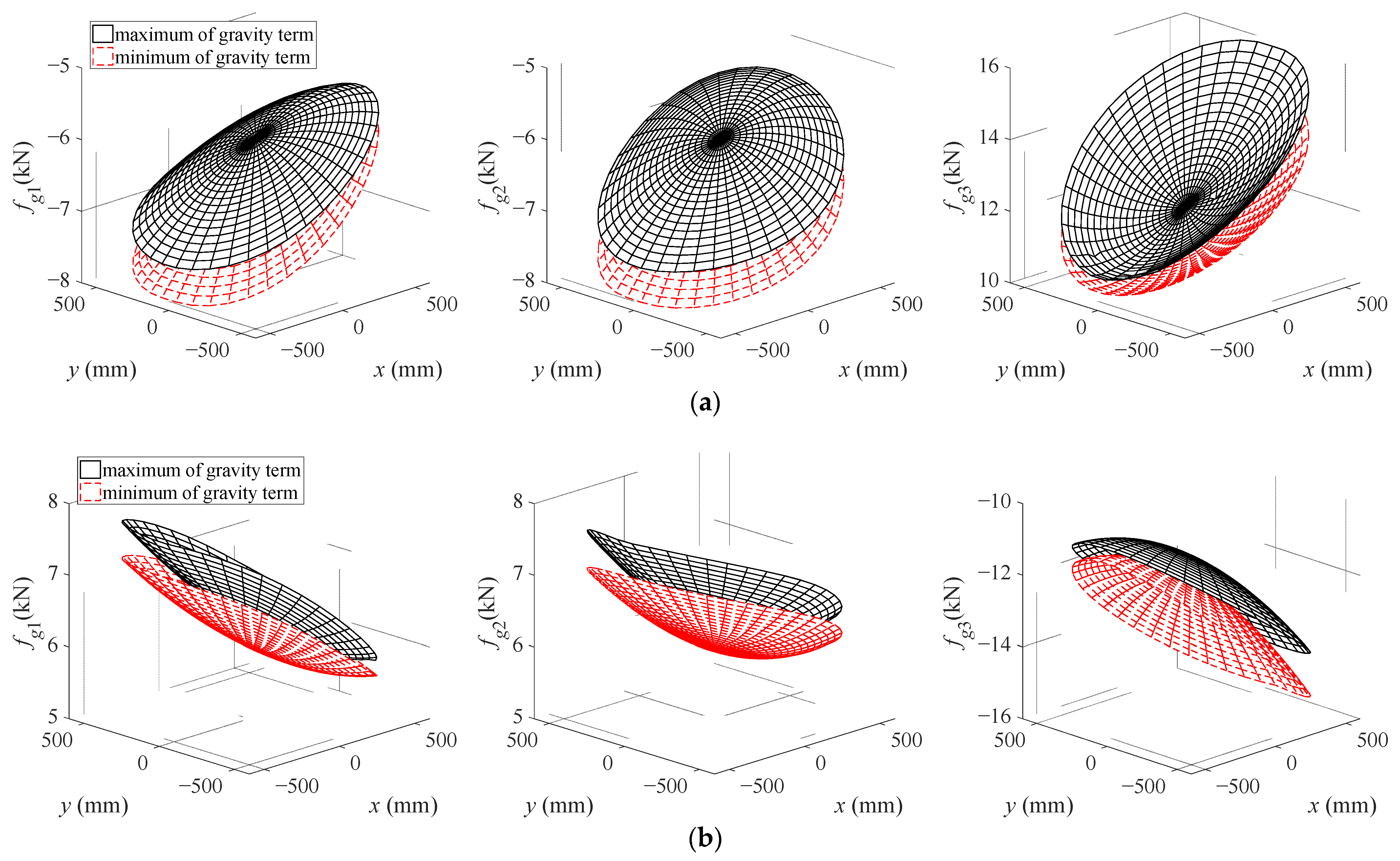
5.1. Influence of Hybrid Robot Placement Direction on Dynamic Performance
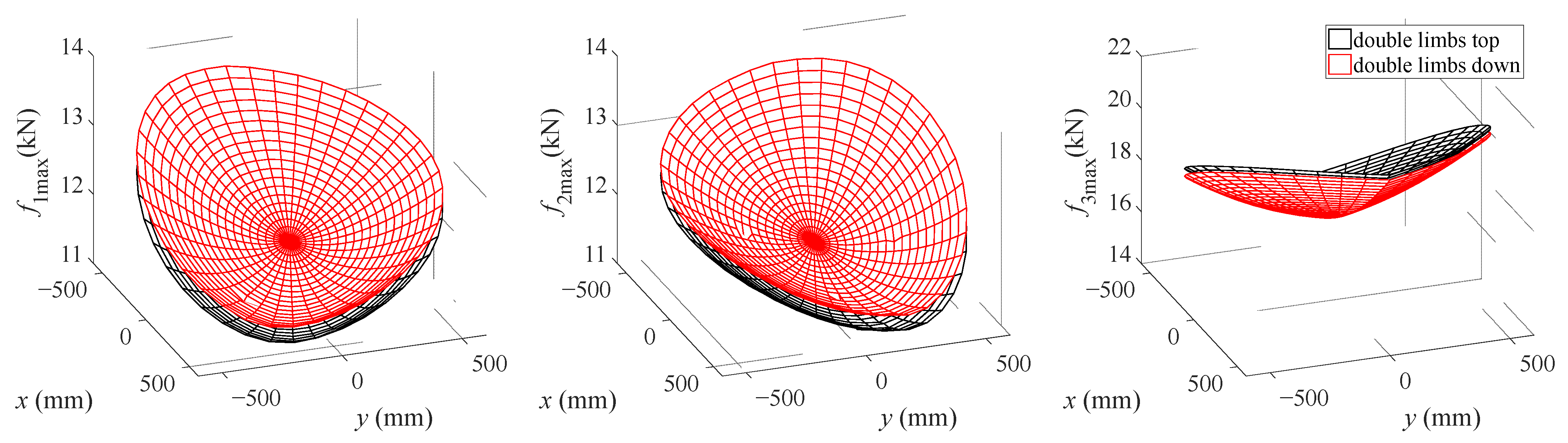
5.2. Effect of the Position of Double Symmetric Limbs on the Dynamic Performance
6. Conclusions
- (1)
- The maximum absolute value of the driving force of the robot at given motion limits of the end-effector can be regarded as the dynamic evaluation index of the hybrid robot.
- (2)
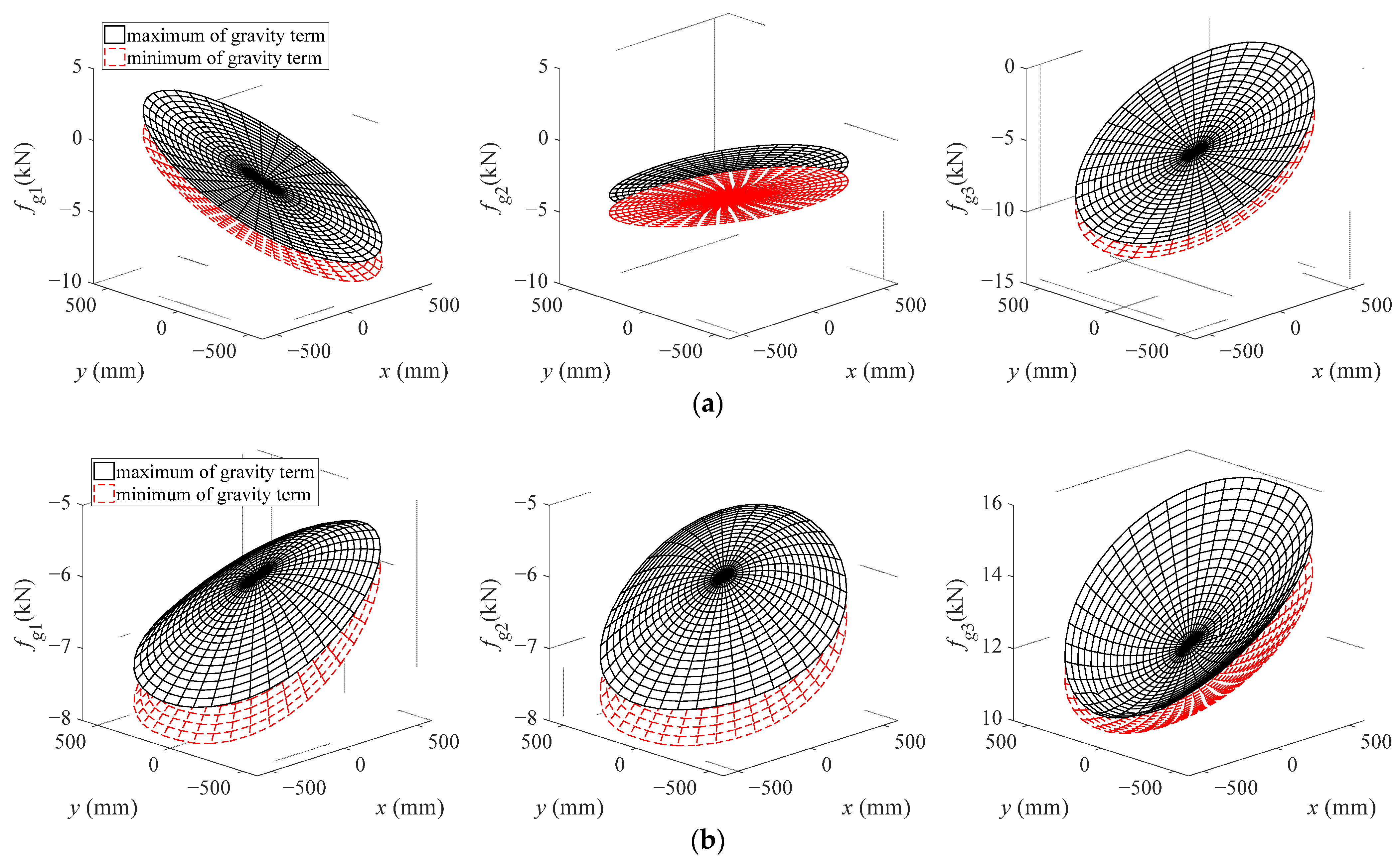
- The influence of placement direction on the dynamics of the hybrid is investigated, and the results indicate that vertical placement is beneficial to the dynamics of the hybrid robot.
- (3)
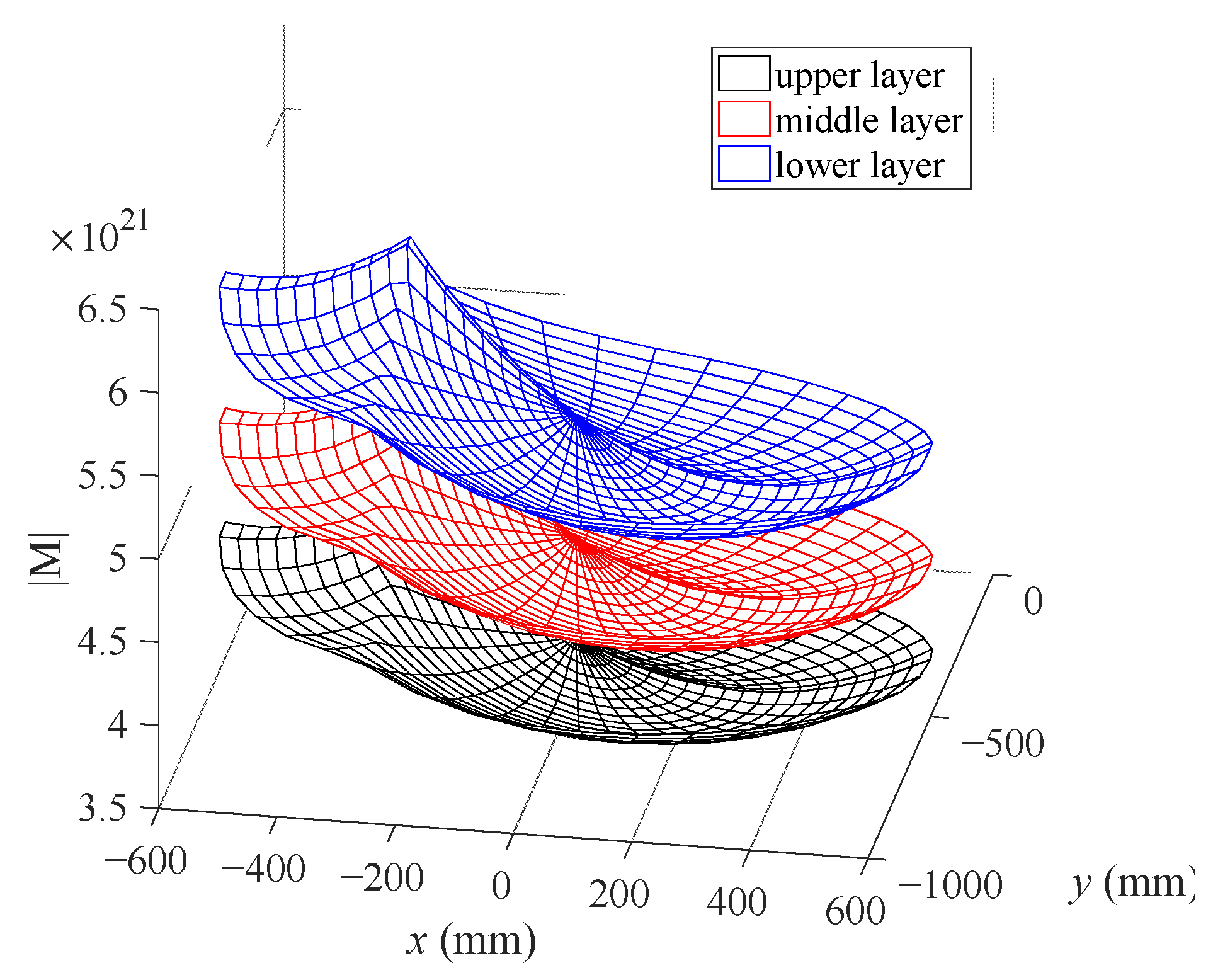
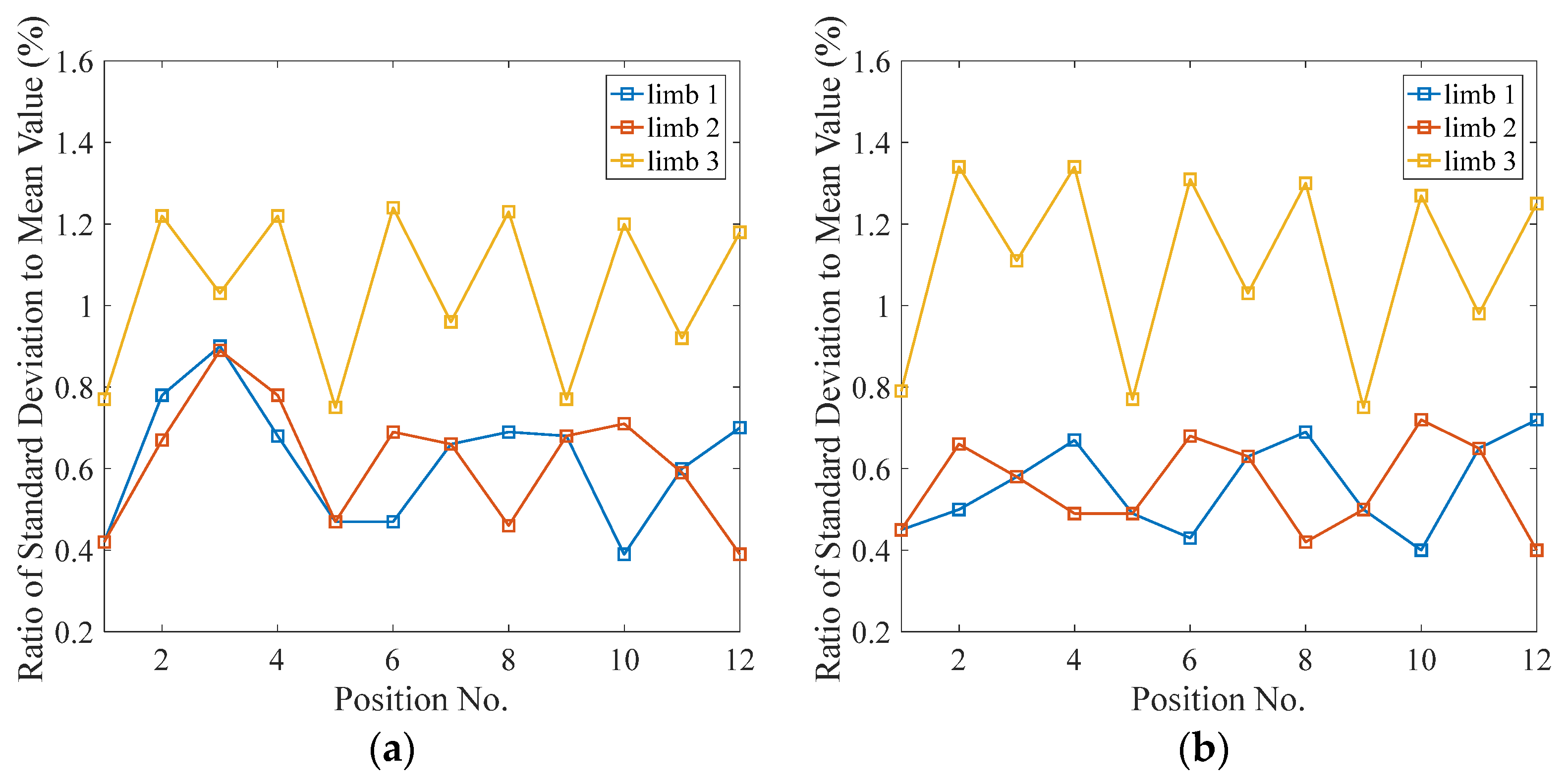
- The effect of the position of the double limbs on the dynamic performance is investigated. The results show that when double limbs are arranged on top, the average dynamic performance of the double limbs can be improved, while the dynamic performance of the third limb will be slightly deteriorated.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| p1 | 845 | mm | q1 | 480 | mm |
| p2 | 360 | mm | q2 | 205 | mm |
| d | 160 | mm | k | 435 | mm |
| L | 180 | mm | pi (i = 1, 2, 3) | 16 | mm |
| mi (i = 1, 2) | 331 | kg | m3 | 465 | kg |
| m4 | 155 | kg | m5 | 43 | kg |
| ei (i = 1, 2) | 650 | mm | e3 | 653 | mm |
| mm | mm | ||||
| kg × m2 | kg × m2 | ||||
| kg × m2 | (i = 1, 2, 3) | kg × m2 | |||
| kg × m2 | kg × m2 |
References
- Orsino, R.M.M.; Coelho, T.A.H.; Pesce, C.P. Analytical mechanics approaches in the dynamic modelling of Delta mechanism. Robotica 2015, 33, 953–973. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.S.; You, Z. An overview of dynamic parameter identification of robots. Robot. Cim.-Int. Manuf. 2010, 26, 414–419. [Google Scholar] [CrossRef]
- Si, G.N.; Chen, F.H.; Zhang, X.P. Comparison of the dynamic performance of planar 3-DOF parallel manipulators. Machines 2022, 10, 233. [Google Scholar] [CrossRef]
- Chanal, H.; Guichard, A.; Blaysat, B.; Caro, S. Elasto-dynamic modeling of an over-constrained parallel kinematic machine using a beam model. Machines 2022, 10, 200. [Google Scholar] [CrossRef]
- Lee, G.; Park, S.; Lee, D.; Park, F.C.; Jeong, J.I.; Kim, J. Minimizing energy consumption of parallel mechanisms via redundant actuation. IEEE-ASME Trans. Mech. 2015, 20, 2805–2812. [Google Scholar] [CrossRef]
- Wu, J.; Gao, Y.; Zhang, B.B.; Wang, L. Workspace and dynamic performance evaluation of the parallel manipulators in a spray-painting equipment. Robot. Cim.-Int. Manuf. 2017, 44, 199–207. [Google Scholar] [CrossRef]
- Merlet, J.P. Determination of the orientation workspace of parallel manipulators. J. Intell. Robot. Syst. 1995, 13, 143–160. [Google Scholar] [CrossRef]
- Karger, A.; Husty, M. Classification of all self-motions of the original Stewart-Gough platform. Comput. Aided Des. 1998, 30, 205–215. [Google Scholar] [CrossRef]
- Luces, M.; Mills, J.K.; Benhabib, B. A review of redundant parallel kinematic mechanisms. J. Intell. Robot. Syst. 2017, 86, 175–198. [Google Scholar] [CrossRef]
- Xu, P.; Cheung, C.F.; Li, B.; Wang, C.; Zhao, C. Design, dynamic analysis, and experimental evaluation of a hybrid parallel-serial polishing machine with decoupled motions. J. Mech. Robot. 2021, 13, 061008. [Google Scholar] [CrossRef]
- Liu, S.; Sun, Y.; Peng, G.; Xue, Y.; Hnydiuk-Stefan, A.; Li, Z. Development of a novel 6-DOF hybrid serial-parallel mechanism for pose adjustment of large-volume components. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 236, 2099–2114. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Y.; Sun, P.; Luo, Y.; Chen, B.; Zhu, W. A multi-objective approach for the trajectory planning of a 7-DOF serial-parallel hybrid humanoid arm. Mech. Mach. Theory 2021, 165, 104423. [Google Scholar] [CrossRef]
- Wu, J.; Yu, G.; Gao, Y.; Wang, L. Mechatronics modeling and vibration analysis of a 2-DOF parallel manipulator in a 5-DOF hybrid machine tool. Mech. Mach. Theory 2018, 121, 430–445. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, D. Performance analysis, mapping, and multiobjective optimization of a hybrid robotic machine tool. IEEE Trans. Ind. Electron. 2015, 62, 423–433. [Google Scholar] [CrossRef]
- Lai, Y.-L.; Liao, C.-C.; Chao, Z.-G. Inverse kinematics for a novel hybrid parallel–serial five-axis machine tool. Robot. Cim.-Int. Manuf. 2018, 50, 63–79. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, Y.; Dai, J. Compliance modeling and analysis of a 3-RPS parallel kinematic machine module. Chin. J. Mech. Eng. 2014, 27, 703–713. [Google Scholar] [CrossRef]
- Jin, Y.; Bi, Z.M.; Liu, H.T.; Higgins, C.; Price, M.; Chen, W.H.; Huang, T. Kinematic analysis and dimensional synthesis of Exechon parallel kinematic machine for large volume machining. J. Mech. Robot. 2015, 7, 041004. [Google Scholar] [CrossRef] [Green Version]
- Joshi, S.A.; Tsai, L.-W. The kinematics of a class of 3-DOF, 4-legged parallel manipulators. J. Mech. Design. 2003, 125, 52–60. [Google Scholar] [CrossRef]
- Joshi, S.; Tsai, L.-W. A comparison study of two 3-DOF parallel manipulators: One with three and the other with four supporting legs. IEEE Trans. Robot. Autom. 2003, 19, 200–209. [Google Scholar] [CrossRef]
- Liu, X.-J.; Han, G.; Xie, F.; Meng, Q. A novel acceleration capacity index based on motion/force transmissibility for high-speed parallel robots. Mech. Mach. Theory 2018, 126, 155–170. [Google Scholar] [CrossRef]
- Briot, S.; Caro, S.; Germain, C. Design procedure for a fast and accurate parallel manipulator. J. Mech. Robot. 2017, 9, 061012. [Google Scholar] [CrossRef] [Green Version]
- Merlet, J.P. Solving the forward kinematics of a Gough-type parallel manipulator with interval analysis. Int. J. Robot. Res. 2004, 23, 221–235. [Google Scholar] [CrossRef]
- Kumar, S.; Martensen, J.; Mueller, A.; Kirchner, F. Model simplification for dynamic control of series-parallel hybrid robots—A representative study on the effects of neglected dynamics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019. [Google Scholar]
- Felis, M.L. RBDL: An efficient rigid-body dynamics library using recursive algorithms. Auton. Robot. 2017, 41, 495–511. [Google Scholar] [CrossRef]
- Li, M.; Huang, T.; Mei, J.; Zhao, X.; Chetwynd, D.G.; Hu, S.J. Dynamic formulation and performance comparison of the 3-DOF modules of two reconfigurable PKM—The Tricept and the TriVariant. J. Mech. Des. 2005, 127, 1129–1136. [Google Scholar] [CrossRef]
- Zhang, H.-Q.; Fang, H.-R.; Jiang, B.-S.; Wang, S.-G. Dynamic performance evaluation of a redundantly actuated and over-constrained parallel manipulator. Int. J. Autom. Comput. 2019, 16, 274–285. [Google Scholar] [CrossRef]
- Shao, H.; Zhang, H.; Yan, W. Dynamic modeling and performance optimization of a 2-PRU-PPRC 2T1R redundant parallel manipulator. In Proceedings of the 9th IEEE Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (IEEE-CYBER), Suzhou, China, 29 July–2 August 2019. [Google Scholar]
- Rao, C.; Xu, L.; Chen, Q.; Ye, W. Dynamic modeling and performance evaluation of a 2UPR-PRU parallel kinematic machine based on screw theory. J. Mech. Sci. Technol. 2021, 35, 2369–2381. [Google Scholar] [CrossRef]
- Han, J.; Shan, X.; Liu, H.; Xiao, J.; Huang, T. Fuzzy gain scheduling PID control of a hybrid robot based on dynamic characteristics. Mech. Mach. Theory 2023, 184, 105283. [Google Scholar] [CrossRef]
- Hao, Q. Optimization Design and Dynamic Control of a 2-DoF Planar Parallel Manipulator. Ph.D. Thesis, Tsinghua University, Beijing, China, 2011. [Google Scholar]
- Asada, H. A geometrical representation of manipulator dynamics and its application to arm design. J. Dyn. Syst.-T ASME 1983, 105, 131–142. [Google Scholar] [CrossRef]
- Yoshikawa, T. Dynamic manipulability of robot manipulators. J. Robot. Syst. 1985, 2, 113–124. [Google Scholar]
- Chen, M.; Zhang, Q.; Qin, X.; Sun, Y. Kinematic, dynamic, and performance analysis of a new 3-DOF over-constrained parallel mechanism without parasitic motion. Mech. Mach. Theory 2021, 162, 104365. [Google Scholar] [CrossRef]
- Kim, Y.; Desa, S. The definition, determination, and characterization of acceleration sets for spatial manipulators. Int. J. Robot. Res. 1993, 12, 572–587. [Google Scholar] [CrossRef] [Green Version]
- Bowling, A.; Kim, C.H. Dynamic performance analysis for non-redundant robotic manipulators in contact. In Proceedings of the 20th IEEE International Conference on Robotics and Automation (ICRA), Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Xie, S.; Hu, K.; Liu, H.; Wan, Y. Dynamic modeling and performance analysis of a new redundant parallel rehabilitation robot. IEEE Access 2020, 8, 222211–222225. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Gao, F. Dynamic formulation and performance evaluation of the redundant parallel manipulator. Robot. Cim.-Int. Manuf. 2009, 25, 770–781. [Google Scholar] [CrossRef]
- Ye, H.; Wang, D.; Wu, J.; Yue, Y.; Zhou, Y. Forward and inverse kinematics of a 5-DOF hybrid robot for composite material machining. Robot. Cim.-Int. Manuf. 2020, 65, 101961. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, Y.; Yao, J.; Zhao, Y. Design of a novel 5-DOF hybrid serial-parallel manipulator and theoretical analysis of its parallel part. Robot. Cim.-Int. Manuf. 2018, 53, 228–239. [Google Scholar] [CrossRef]
- Wang, X.J.; Wu, J.; Wang, Y.T. Dynamics evaluation of 2UPU/SP parallel mechanism for a 5-DOF hybrid robot considering gravity. Robot. Auton. Syst. 2021, 135, 103675. [Google Scholar] [CrossRef]










| Global Index | Vertical | Horizontal |
|---|---|---|
| 9.56 | 12.04 | |
| 9.56 | 12.04 | |
| 11.85 | 18.62 |
| Global index | Double Limbs on the Top | Double Limbs on the Bottom |
|---|---|---|
| 12.04 | 12.26 | |
| 12.04 | 12.26 | |
| 18.62 | 18.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wu, J.; Zhou, Y. Dynamic Modeling and Performance Evaluation of a 5-DOF Hybrid Robot for Composite Material Machining. Machines 2023, 11, 652. https://doi.org/10.3390/machines11060652
Wang X, Wu J, Zhou Y. Dynamic Modeling and Performance Evaluation of a 5-DOF Hybrid Robot for Composite Material Machining. Machines. 2023; 11(6):652. https://doi.org/10.3390/machines11060652
Chicago/Turabian StyleWang, Xiaojian, Jun Wu, and Yulin Zhou. 2023. "Dynamic Modeling and Performance Evaluation of a 5-DOF Hybrid Robot for Composite Material Machining" Machines 11, no. 6: 652. https://doi.org/10.3390/machines11060652
APA StyleWang, X., Wu, J., & Zhou, Y. (2023). Dynamic Modeling and Performance Evaluation of a 5-DOF Hybrid Robot for Composite Material Machining. Machines, 11(6), 652. https://doi.org/10.3390/machines11060652