
Experimental Investigation of Frictional Resistance in Sliding Contact between Undulating Surfaces and Third-Body Particles



Abstract
:1. Introduction
2. Experiment Method
3. Experimental Results
3.1. Sliding with a Single Particle under Dry Contact Condition
3.2. Influence of the Particle Number and Sliding Velocity
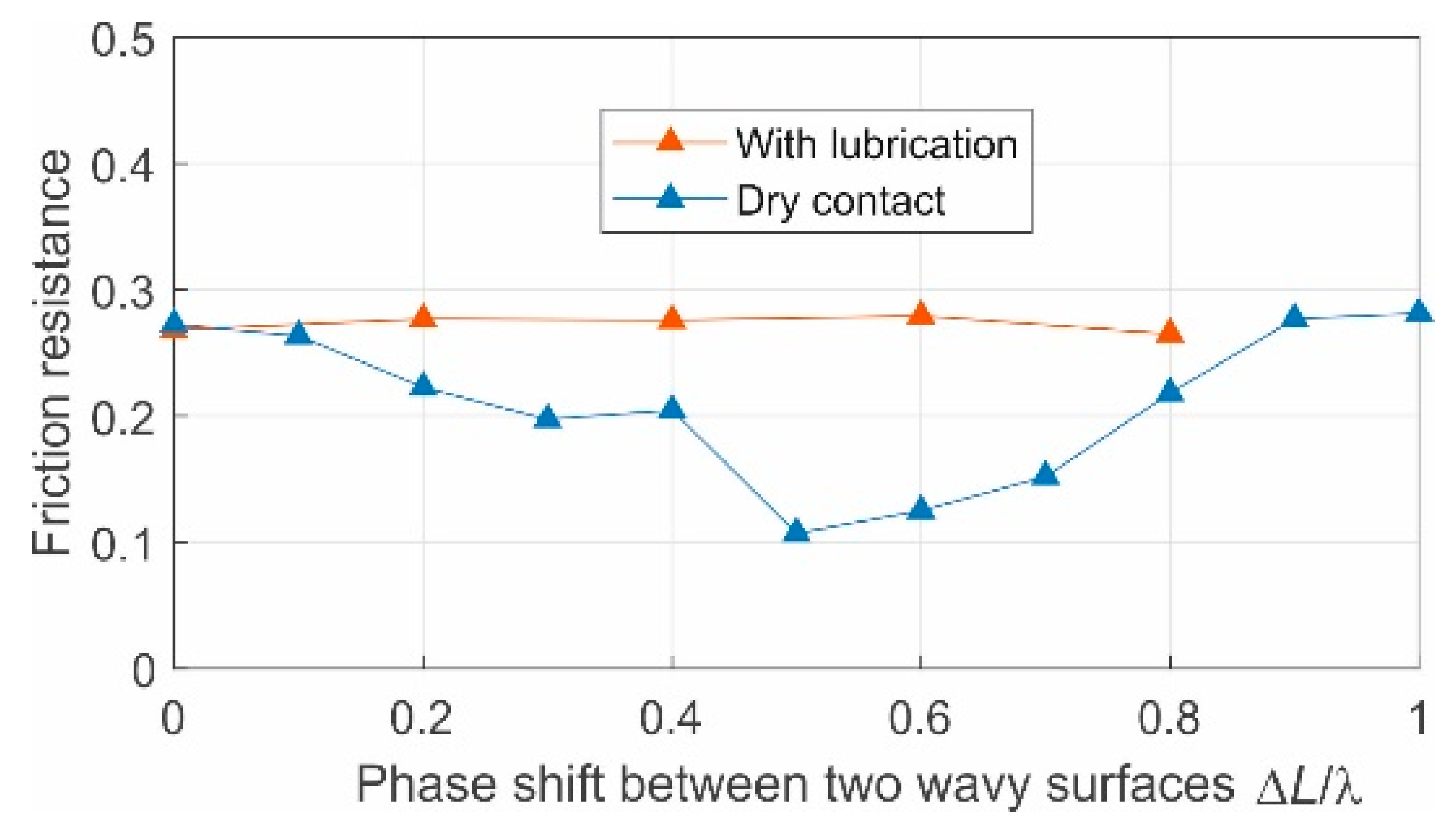
3.3. Influence of Lubrication
4. An Approximate Solution for the Case without Phase Shift
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Popov, V.L. Is Tribology Approaching Its Golden Age? Grand Challenges in Engineering Education and Tribological Research. Front. Mech. Eng. 2018, 4, 16. [Google Scholar] [CrossRef]
- Gates, J.D. Two-body and three-body abrasion: A critical discussion. Wear 1998, 214, 139–146. [Google Scholar] [CrossRef]
- Vakis, A.I.; Yastrebov, V.A.; Scheibert, J.; Nicola, L.; Dini, D.; Minfray, C.; Almqvist, A.; Paggi, M.; Lee, S.; Limbert, G.; et al. Modeling and simulation in tribology across scales: An overview. Tribol. Int. 2018, 125, 169–199. [Google Scholar] [CrossRef]
- Denape, J. Third Body Concept and Wear Particle Behavior in Dry Friction Sliding Conditions. Key Eng. Mater. 2015, 640, 1–12. [Google Scholar] [CrossRef]
- He, G.; Müser, M.H.; Robbins, M.O. Adsorbed layers and the origin of static friction. Science 1999, 284, 1650–1652. [Google Scholar] [CrossRef] [PubMed]
- Jourani, A.; Bouvier, S. Friction and Wear Mechanisms of 316L Stainless Steel in Dry Sliding Contact: Effect of Abrasive Particle Size. Tribol. Trans. 2015, 58, 131–139. [Google Scholar] [CrossRef]
- Bilz, R.; de Payrebrune, K.M. Investigation of the influence of velocity in a tribological three-body system containing a single layer of rolling hard particles from a mechanical point of view. Tribol. Int. 2021, 159, 106948. [Google Scholar] [CrossRef]
- Yousif, B.F.; Nirmal, U.; Wong, K.J. Three-body abrasion on wear and frictional performance of treated betelnut fibre reinforced epoxy (T-BFRE) composite. Mater. Des. 2010, 31, 4514–4521. [Google Scholar] [CrossRef]
- Zum Gahr, K.H. Wear by hard particles. Tribol. Int. 1998, 31, 587–596. [Google Scholar] [CrossRef]
- Schroeder, C.; Grupp, T.M.; Fritz, B.; Schilling, C.; Chevalier, Y.; Utzschneider, S.; Jansson, V. The influence of third-body particles on wear rate in unicondylar knee arthroplasty: A wear simulator study with bone and cement debris. J. Mater. Sci. Mater. Med. 2013, 24, 1319–1325. [Google Scholar] [CrossRef]
- Brink, T.; Milanese, E.; Molinari, J.F. Effect of wear particles and roughness on nanoscale friction. Phys. Rev. Mater. 2022, 6, 013606. [Google Scholar] [CrossRef]
- Hsia, F.C.; Elam, F.M.; Bonn, D.; Weber, B.; Franklin, S.E. Wear particle dynamics drive the difference between repeated and non-repeated reciprocated sliding. Tribol. Int. 2020, 142, 105983. [Google Scholar] [CrossRef]
- Zhang, Y.; Wei, D.; Wu, B.; Jiang, P. Construction of Friction Model of the Third Body Layer and Its Effects on the Dynamic Characteristics in Brake System. ASME J. Comput. Nonlinear Dynam. 2023, 18, 011003. [Google Scholar] [CrossRef]
- Aghababaei, R.; Warner, D.H.; Molinari, J.F. Critical length scale controls adhesive wear mechanisms. Nat. Commun. 2016, 7, 11816. [Google Scholar] [CrossRef] [PubMed]
- Deng, F.; Tsekenis, G.; Rubinstein, S.M. Simple law for third-body friction. Phys. Rev. Lett. 2019, 122, 135503. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Lyashenko, I.A.; Starcevic, J. An experimental study on third-body particle transport in sliding contact. FU Mech. Eng. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- de Payrebrune, K.M.; Schönecker, C.; Antonyuk, S.; Bilz, R.; Krull, F.; Noichl, I.; Ripperger, S.; Strohner, D. Interactions Between Particles and Surfaces. In Component Surfaces; Springer Series in Advanced Manufacturing; Aurich, J.C., Hasse, H., Eds.; Springer: Cham, Switzerland, 2024. [Google Scholar]
- Bilz, R.; de Payrebrune, K.M. Simplified description of hard particles in tribological systems using statistical sample particles. Proc. Appl. Math. Mech. 2023, 23, e202300106. [Google Scholar] [CrossRef]
- Horng, J.; Yu, C.; Chen, Y. Tribological Characteristics and Load-Sharing of Point-Contact Interface in Three-Body Mixed Lubrication. ASME J. Tribol. 2022, 144, 052201. [Google Scholar] [CrossRef]
- Popov, V.L.; Li, Q.; Lyashenko, I.A.; Pohrt, R. Adhesion and friction in hard and soft contacts: Theory and experiment. Friction 2021, 9, 1688–1706. [Google Scholar] [CrossRef]
- Prandtl, L. Ein Gedankenmodell zur kinetischen Theorie der festen Körper. Z. Angew. Math. Mech. 1928, 8, 85–106. [Google Scholar] [CrossRef]
- Popov, V.L.; Gray, J.A.T. Prandtl-Tomlinson model: History and applications in friction, plasticity, and nanotechnologies. Z. Angew. Math. Mech. 2012, 92, 683–708. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Value |
|---|---|
| Geometry of the wavy surface | Amplitude A = 0.5 mm, wavelength λ = 10 mm |
| Particle size (Diameter of the steel ball) | D = 2, 2.38, 3, 3.18, 4, 4.5, 4.76, 5, 5.56 mm |
| Particle number | 1, 2, 3, 4, 6, 8 |
| Initial position of the upper rubber | Phase shift ΔL/λ = 0, 0.2, 0.4, 0.6 0.8, 1 |
| Sliding velocity of the upper rubber | 0.05, 0.1, 0.2, 0.4, 0.8 mm/s |
| Lubricant | Without and with (SHC XMP-320) |
| Experiment series 1: Influence of particle size and phase shift (‘✓’—conducted; ‘×’—not conducted) | |||||||||
| ΔL/λ | D = 2 mm | 2.38 | 3 | 3.18 | 4 | 4.5 | 4.76 | 5 | 5.56 |
| 0 | ✓ | ✓ | |||||||
| 0.2 | ✓ | × | |||||||
| 0.4 | ✓ | × | |||||||
| 0.6 | ✓ | × | |||||||
| 0.8 | ✓ | × | |||||||
| 1 | ✓ | × | |||||||
| Other conditions: single particle, without lubricant | |||||||||
| Experiment series 2: Influence of particle number | |||||||||
| Particle number: N = 2, 4, 6, 8 | |||||||||
| Other conditions: v = 0.05 mm/s, ΔL/λ = 0, without lubricant | |||||||||
| Experiment series 3: Influence of sliding velocity | |||||||||
| Sliding velocity: 0.05, 0.1, 0.2, 0.4, 0.8 mm/s | |||||||||
| Other conditions: single particle D = 2 mm, ΔL/λ = 0, without lubricant | |||||||||
| Experiment series 4: Influence of lubricant | |||||||||
| Phase shift: ΔL/λ = 0, 0.2, 0.4, 0.6, 0.8 | |||||||||
| Other conditions: single particle D = 3 mm, v = 0.05 mm/s | |||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Heß, M. Experimental Investigation of Frictional Resistance in Sliding Contact between Undulating Surfaces and Third-Body Particles. Machines 2024, 12, 150. https://doi.org/10.3390/machines12030150
Li Q, Heß M. Experimental Investigation of Frictional Resistance in Sliding Contact between Undulating Surfaces and Third-Body Particles. Machines. 2024; 12(3):150. https://doi.org/10.3390/machines12030150
Chicago/Turabian StyleLi, Qiang, and Markus Heß. 2024. "Experimental Investigation of Frictional Resistance in Sliding Contact between Undulating Surfaces and Third-Body Particles" Machines 12, no. 3: 150. https://doi.org/10.3390/machines12030150
APA StyleLi, Q., & Heß, M. (2024). Experimental Investigation of Frictional Resistance in Sliding Contact between Undulating Surfaces and Third-Body Particles. Machines, 12(3), 150. https://doi.org/10.3390/machines12030150