

Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review



Abstract
:1. Introduction
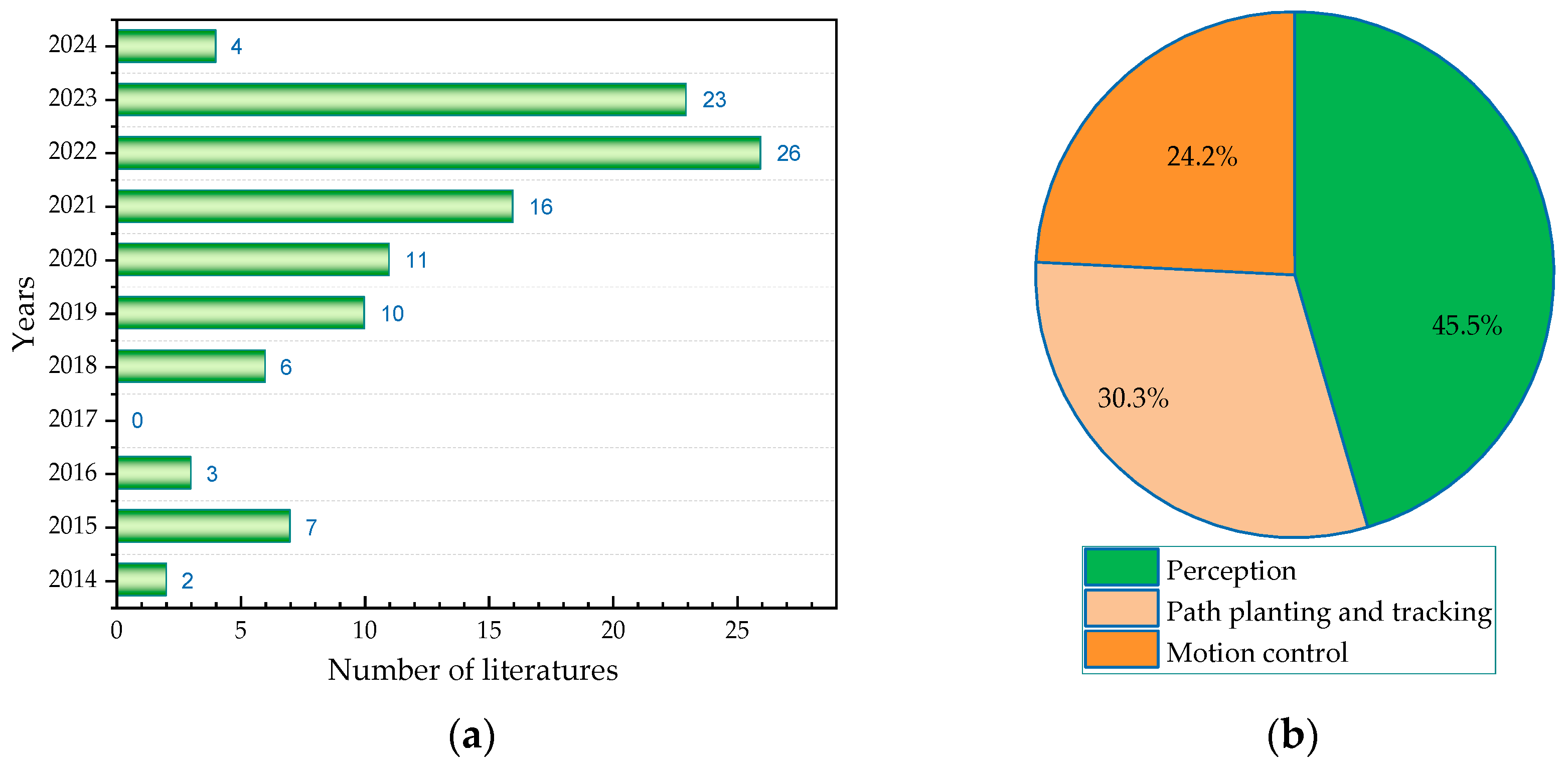
2. Methodology
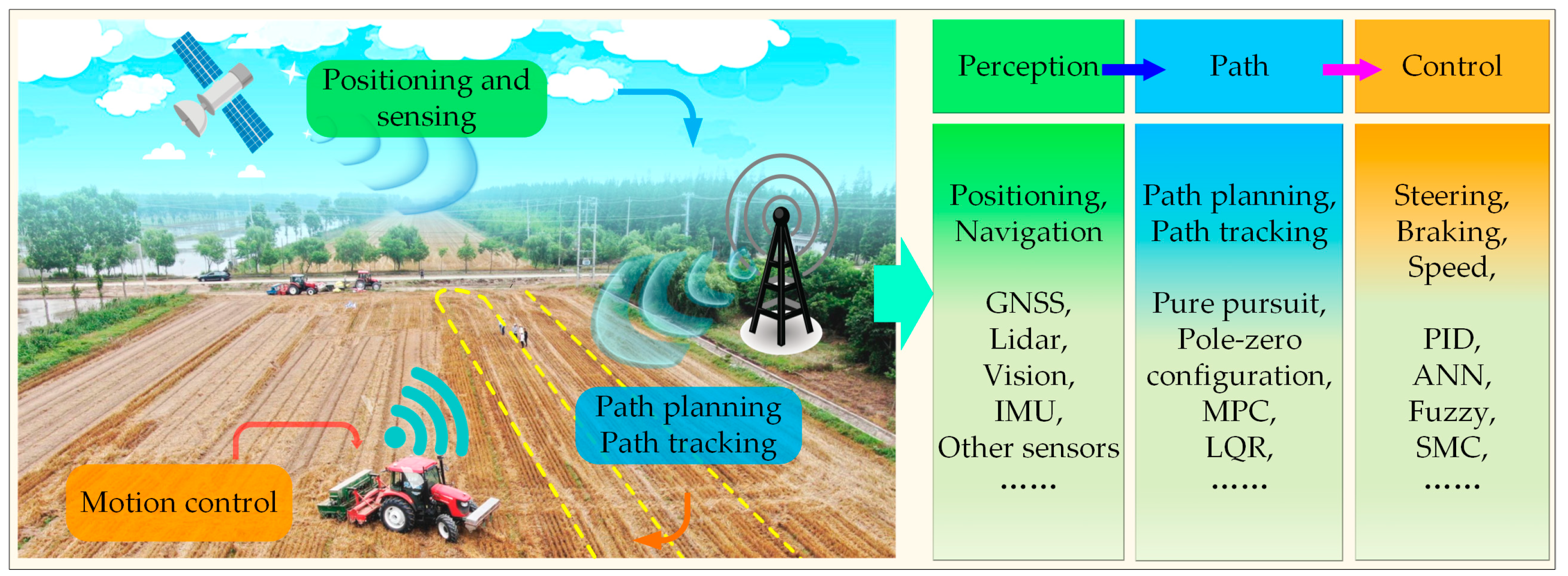
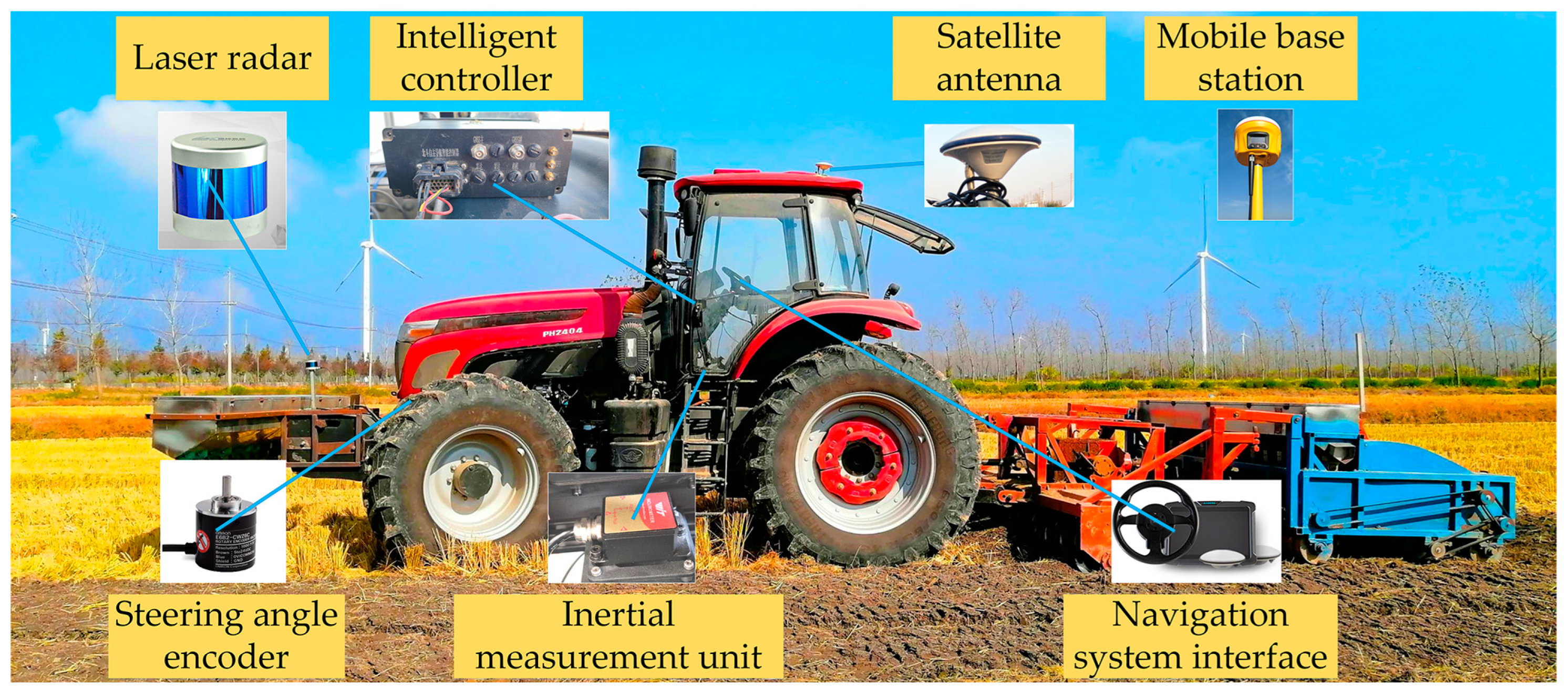
3. Perceptive Techniques of UATs
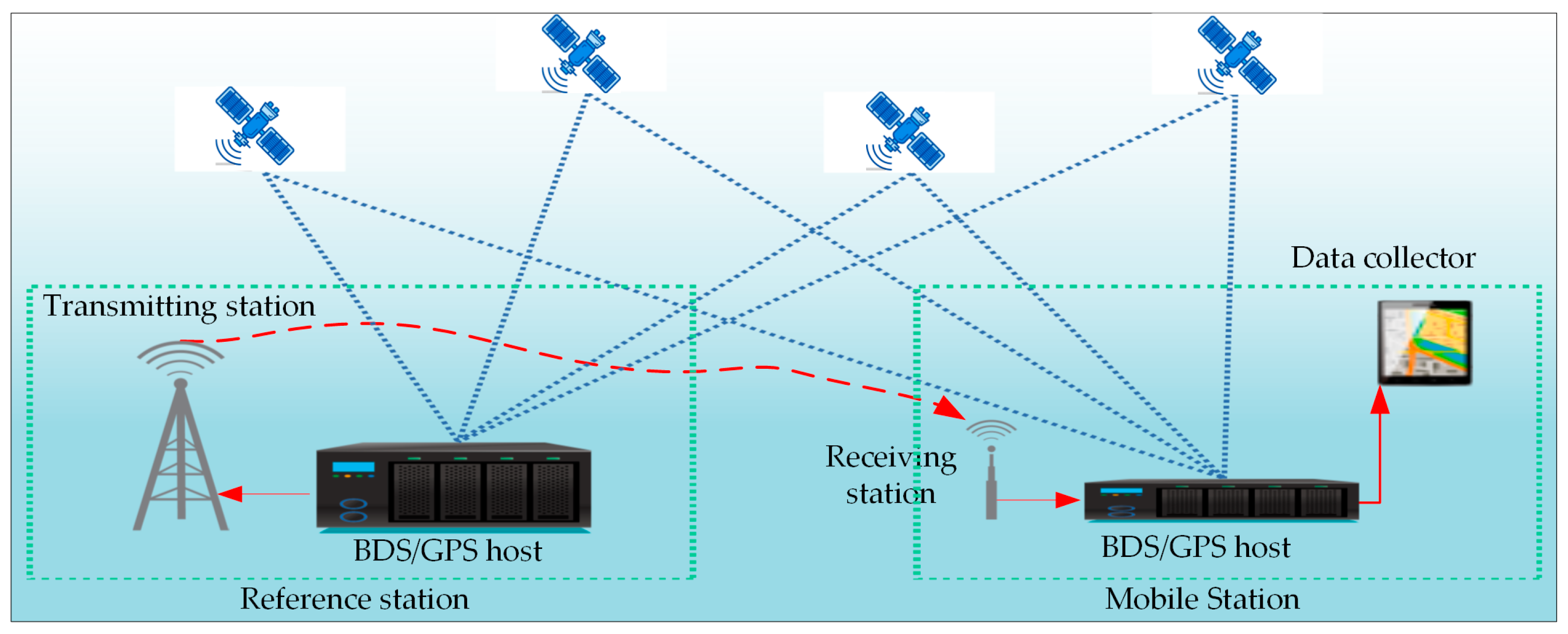
3.1. Positioning Technology
3.2. Sensing Technology
3.2.1. Field Environment Perception
- (1)
- Visual perception
- (2)
- Laser-based navigation
- (3)
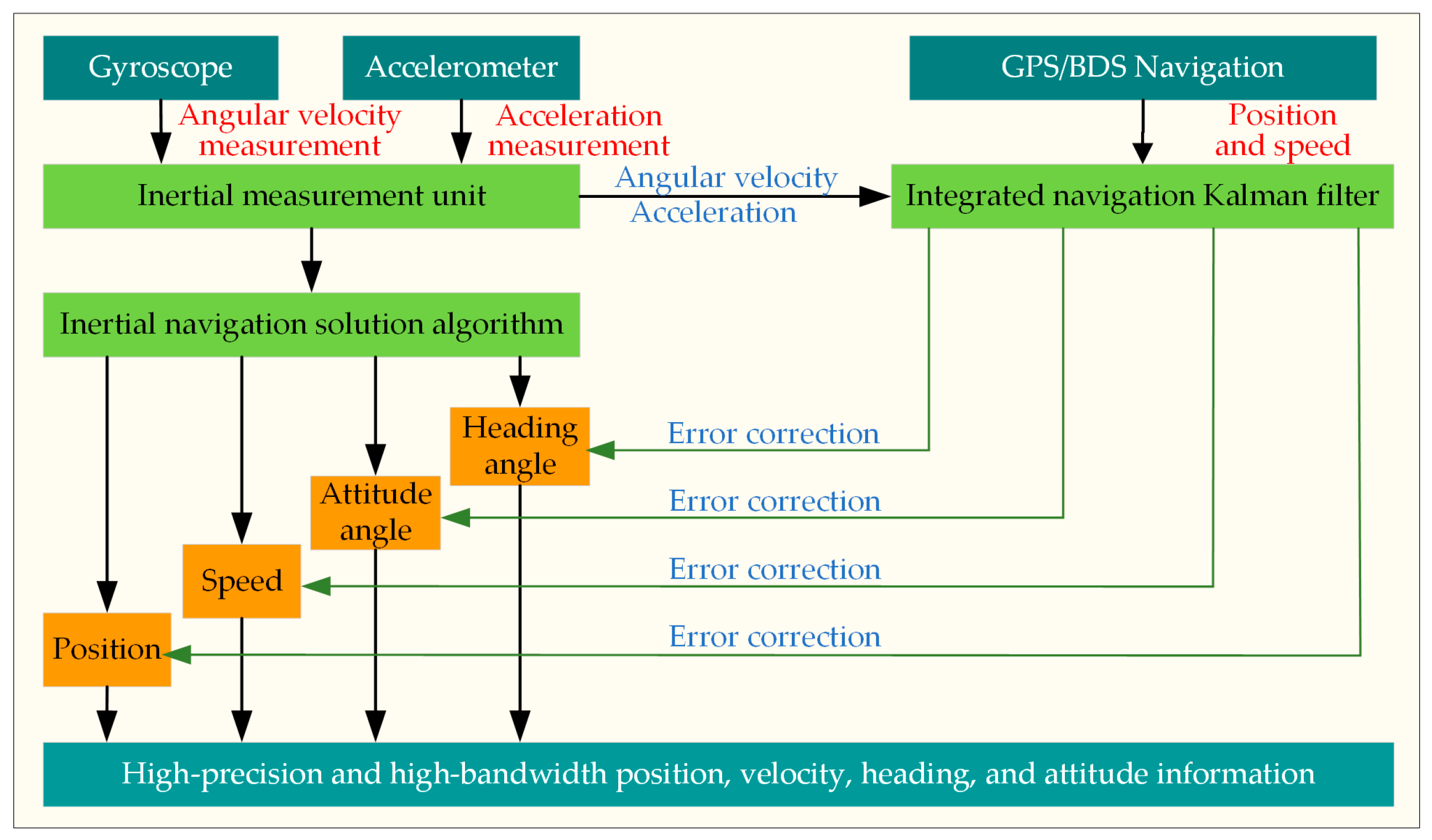
- Inertial measurement unit
- (4)
- Multi-sensor data fusion and perception
3.2.2. Operation State Perception
4. Path Planning Techniques of UATs
4.1. Path Planning Optimization
4.1.1. Factors of Path Planning
4.1.2. Optimization Strategies
4.2. Global Path Planning
4.3. Local Path Planning
5. Path Tracking Techniques of UATs
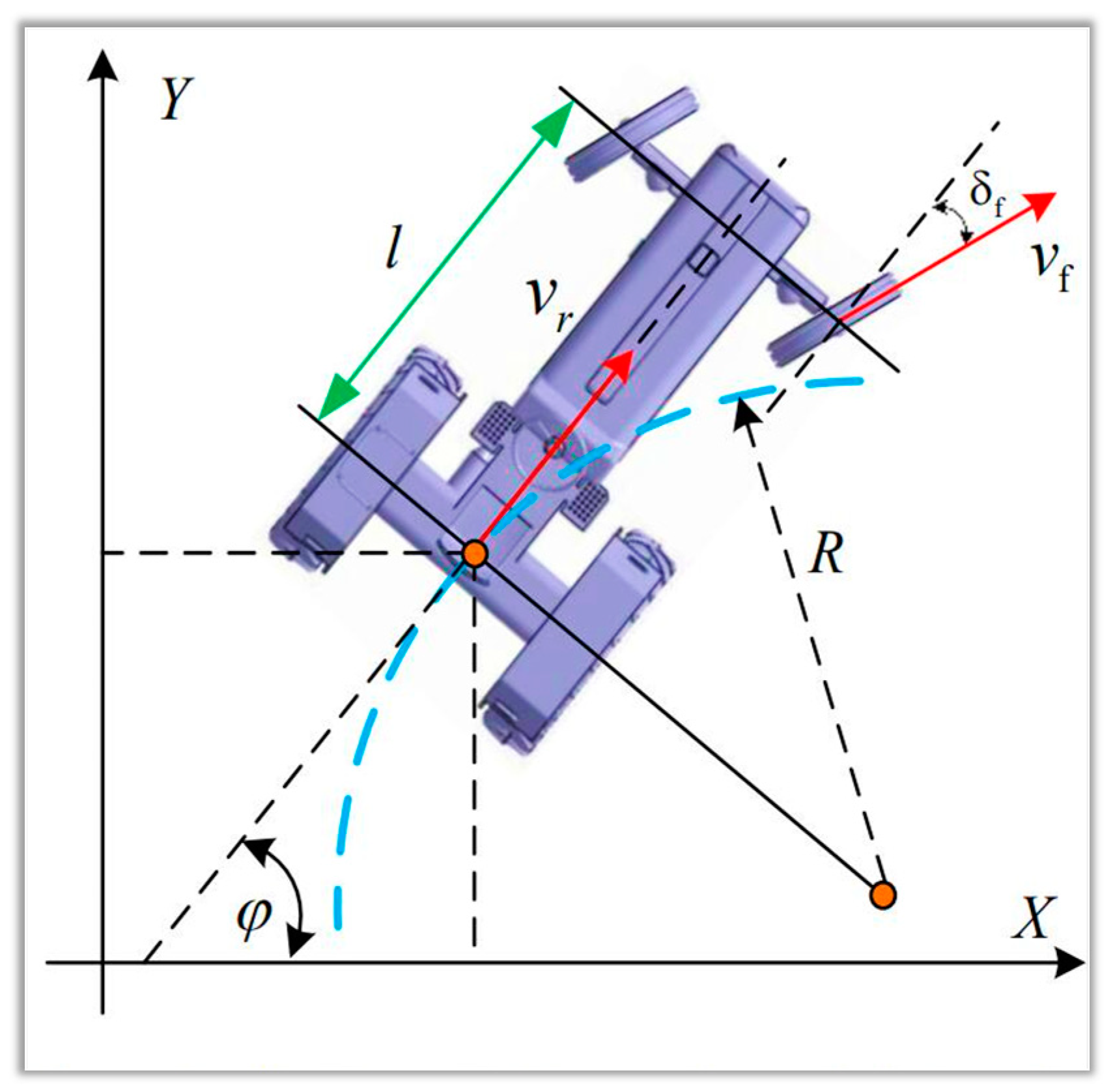
5.1. Motion Model for Path Tracking
5.2. Path Tracking Algorithms
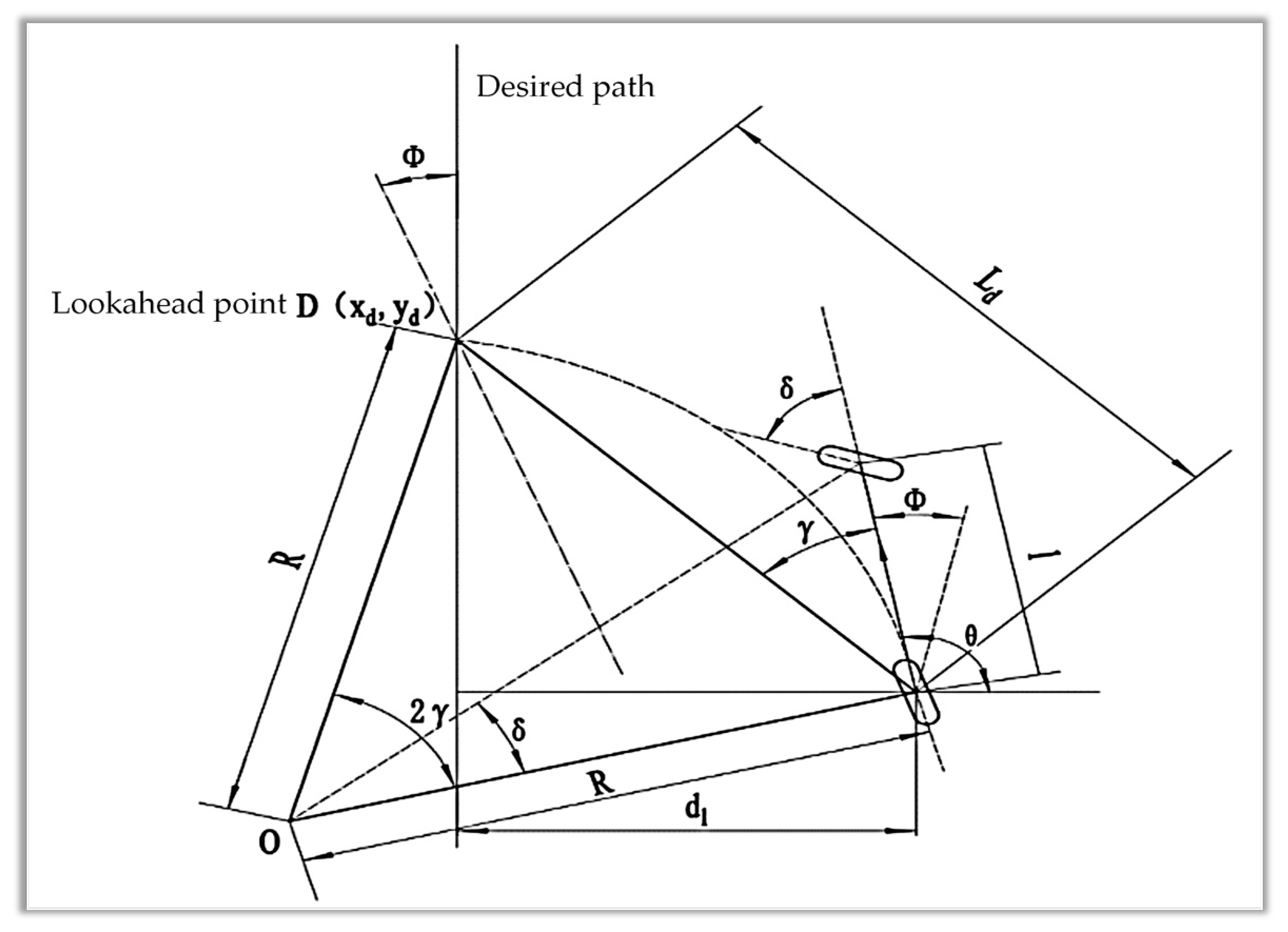
5.2.1. Pure Pursuit Method
5.2.2. Pole-Zero Configuration
5.2.3. Model Predictive Control
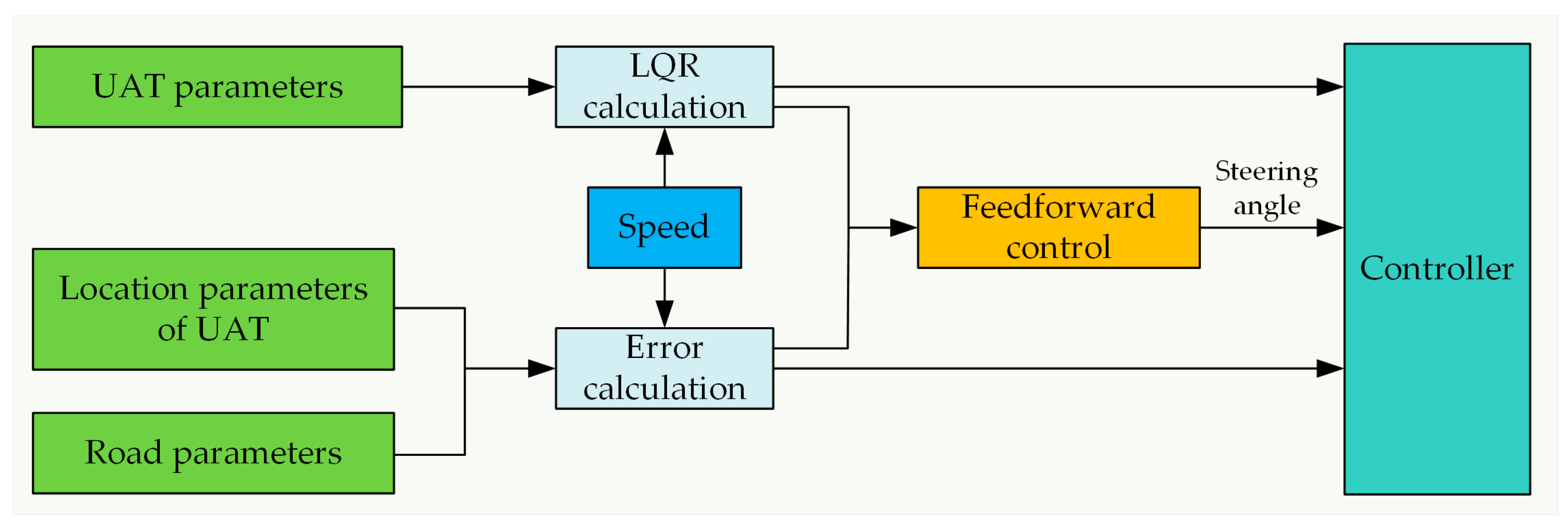
5.2.4. Linear Quadratic Regulator
5.2.5. Other Novel Approaches
6. Motion Control Techniques of UATs
6.1. Control Methods for Automatic Navigation
6.1.1. PID Control
6.1.2. Neural Networks
6.1.3. Fuzzy Control
6.1.4. Sliding Mode Control
6.2. Motion Control of UATs
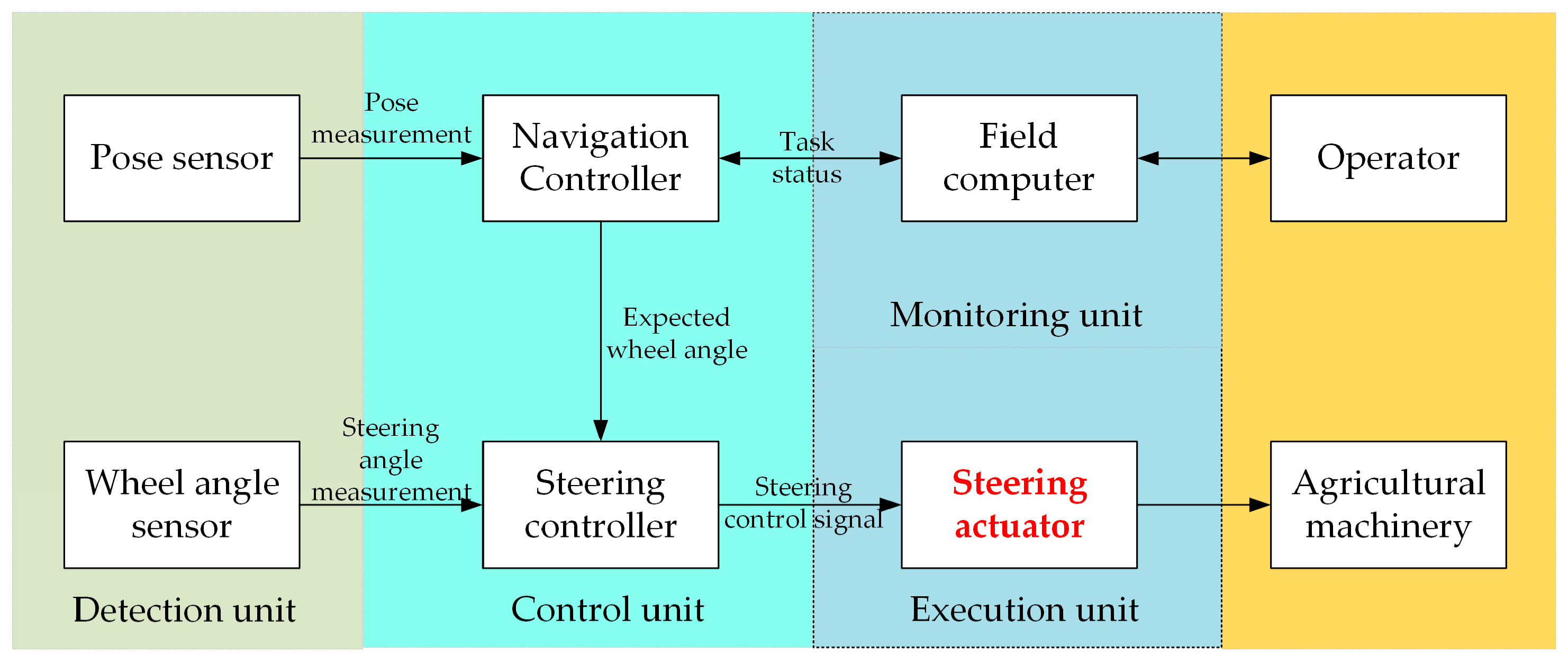
6.2.1. Steering Control
6.2.2. Brake Control
6.2.3. Speed Control
6.3. Controller Area Network Bus Technology for UATs
7. Application of UATs in Precision Farming
7.1. Applications in Plowing
7.2. Applications in Field Management
7.3. Applications in Seeding
7.4. Applications in Harvesting
7.5. Other Applications
8. Discussions
9. Conclusions and Future Work
9.1. Conclusions
- (1)
- The perceptive technique, including positioning, and internal and external sensing of tractors, are currently the two most widely studied technologies in the UAT field. GPS and BDS are widely used GNSS technologies for differential positioning. By using centimeter-level positioning data from GNSS satellite navigation systems, combined with inertial sensors, vision sensors, radar, etc., precise positioning and sensing of UATs can be achieved. Nevertheless, the utilization of GNSS technology for the autonomous navigation of UATs remains relatively limited due to extreme weather conditions and signal disruptions. Various sensors used in this field have both merits and drawbacks. Sensor fusion methods are commonly employed to increase positioning accuracy and reliability. Widely adopted information fusion approaches include Kalman filtering and particle filtering.
- (2)
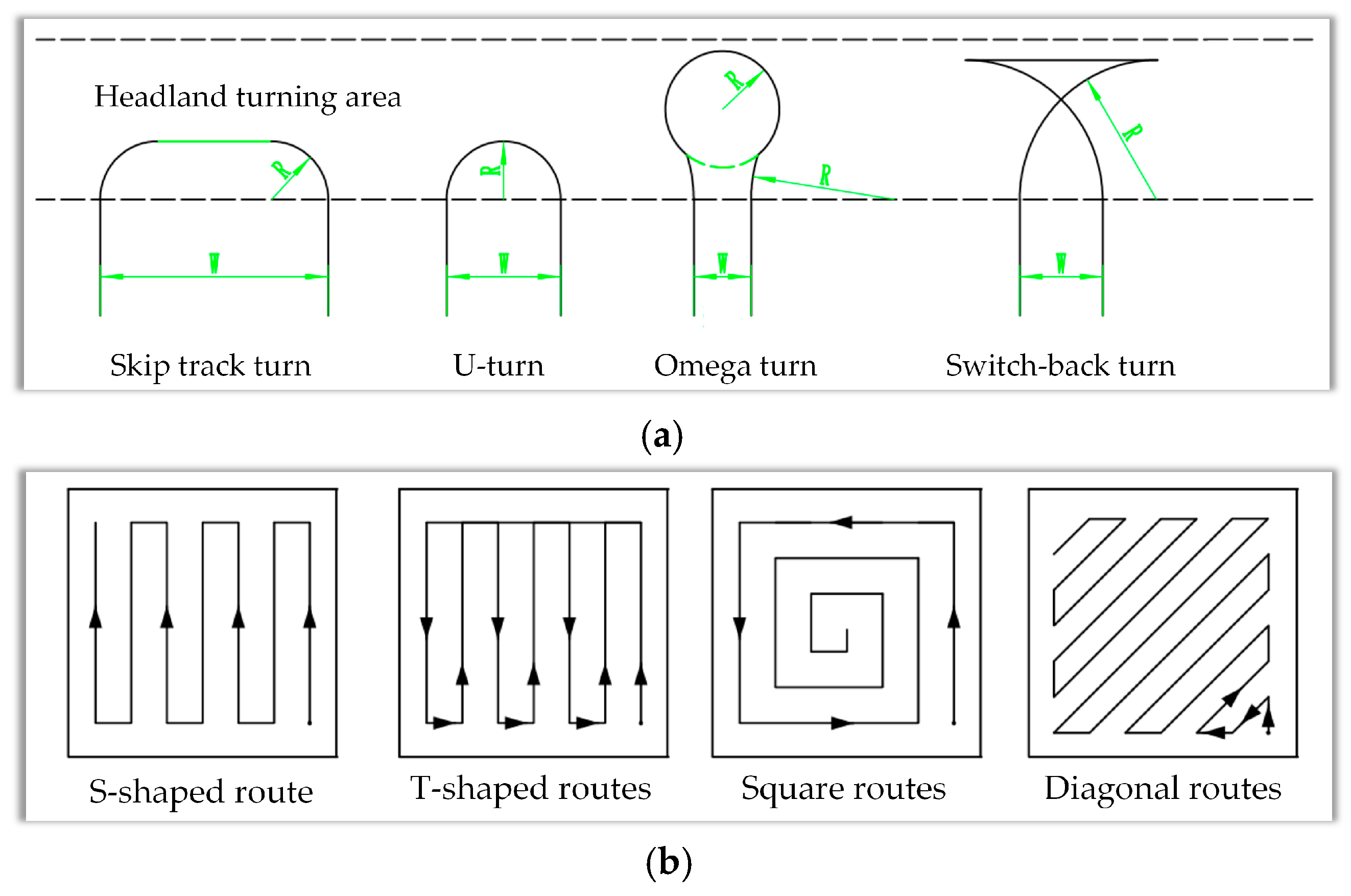
- Path planning and tracking are influenced by field conditions, types of machinery, and turning radius. The motion model precision significantly impacts the accuracy of UAT navigation, especially in complex field environments. Achieving effective and practical automatic boundary steering remains a challenging issue in autonomous navigation control, particularly for turns at field boundaries. Dividing the field into different types and then implementing full-coverage path planning for the target area is the main approach. Obstacle detection in the field can be accomplished using machine vision methods or laser ranging. Stopping machinery is the simplest obstacle avoidance measure because a real-time path planning approach for obstacle avoidance is not yet available.
- (3)
- Speed control and steering control form the foundation of motion control for UAT, while navigation tracking control constitutes its primary focus. The control of speed, and steering is crucial for ensuring the working precision and motion reliability of UAT. The combination of traditional and intelligent control algorithms, coupled with high-performance steering controllers, is essential for improving the navigation efficiency and precision of UAT. The key to whether a motion control method can adapt well to its environment lies in how control parameters are adjusted to enhance the speed and accuracy of the control system. The role of machine learning algorithms in motion state recognition and parameter optimization has become increasingly prominent in recent years.
9.2. Future Work
- (1)
- In terms of perceptive techniques, high-precision maps of farmland with a priori knowledge will be a key focus of future research. It is necessary to conduct research on creating practical and efficient autonomous navigation scheduling systems tailored to China’s conditions. It is crucial to design appropriate sensor combinations, select reliable and effective sensor fusion strategies, and leverage the advantages of sensors to ensure data redundancy or complementarity. Accelerating the usage of the Internet of Things and communication technology for environmental perception is also essential for the autonomous navigation of UAT. A big data cloud platform with 5G high-speed networks needs to be established for UATs to promote the remote monitoring technology.
- (2)
- In terms of path planning and tracking techniques, full-coverage path planning algorithms suitable for irregular fields, multiple obstacles, and multiple constraints need be developed to achieve adaptive path planning for tractors and implements with different turning radii. It is required to develop advanced obstacle avoidance measures suitable for the operating environment of UAT. Real-time obstacle avoidance path planning should be implemented for the dynamic control of tractor and obstacle avoidance. Extensive research may be conducted to develop science-based mathematical models and algorithms for path planning and tracking to enhance efficiency and precision.
- (3)
- In terms of motion control techniques, due to factors like varying loads, the methods based on kinematic models lack robustness and fail to account for changes in dynamic characteristics, making it difficult to achieve the desired results. The future trend should be to establish high-fidelity nonlinear dynamic models for autonomous driving agricultural equipment. Employing machine learning methods to create a tractor motion model can prevent inaccuracies in modeling. This can also help avoid significant changes in model parameters that might impact the efficiency of tractor motion control. This strategy is steadily emerging as a primary focus of research. Extensive research is required to be conducted in order to achieve high-precision and high-reliability motion control units.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lu, W.; Li, J.; Qin, H.; Shu, L.; Song, A. On Dual-Mode Driving Control Method for a Novel Unmanned Tractor with High Safety and Reliability. IEEE-CAA J. Autom. Sin. 2023, 10, 254–271. [Google Scholar] [CrossRef]
- Han, X.; Lai, Y.; Wu, H. A Path Optimization Algorithm for Multiple Unmanned Tractors in Peach Orchard Management. Agronomy 2022, 12, 856. [Google Scholar] [CrossRef]
- Xu, R.; Huang, B.; Yin, H. A Review of the Large-Scale Application of Autonomous Mobility of Agricultural Platform. Comput. Electron. Agric. 2023, 206, 107628. [Google Scholar] [CrossRef]
- Ji, X.; Ding, S.; Wei, X.; Cui, B. Path Tracking of Unmanned Agricultural Tractors Based on a Novel Adaptive Second-Order Sliding Mode Control. J. Franklin Inst.-Eng. Appl. Math. 2023, 360, 5811–5831. [Google Scholar] [CrossRef]
- Xie, B.; Jin, Y.; Faheem, M.; Gao, W.; Liu, J.; Jiang, H.; Cai, L.; Li, Y. Research Progress of Autonomous Navigation Technology for Multi-Agricultural Scenes. Comput. Electron. Agric. 2023, 211, 107963. [Google Scholar] [CrossRef]
- Yin, X.; Wang, Y.; Chen, Y.; Jin, C.; Du, J. Development of Autonomous Navigation Controller for Agricultural Vehicles. Int. J. Agric. Biol. Eng. 2020, 13, 70–76. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, X.; Shu, L.; Hancke, G.P.; Mahfouz, A.M.A. From Industry 4.0 to Agriculture 4.0: Current Status, Enabling Technologies, and Research Challenges. IEEE Trans. Ind. Inform. 2021, 17, 4322–4334. [Google Scholar] [CrossRef]
- Marinoudi, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Robotics and Labour in Agriculture: A Context Consideration. Biosyst. Eng. 2019, 184, 111–121. [Google Scholar] [CrossRef]
- Yoshida, S. Study on Cloud-Based GNSS Positioning Architecture with Satellite Selection Algorithm and Report of Field Experiments. IEICE Trans. Commun. 2022, 105, 388–398. [Google Scholar] [CrossRef]
- Ruan, Z.; Chang, P.; Cui, S.; Luo, J.; Gao, R.; Su, Z. A Precise Crop Row Detection Algorithm in Complex Farmland for Unmanned Agricultural Machines. Biosyst. Eng. 2023, 232, 1–12. [Google Scholar] [CrossRef]
- Liang, Y.; Zhou, K.; Wu, C. Environment Scenario Identification Based on GNSS Recordings for Agricultural Tractors. Comput. Electron. Agric. 2022, 195, 106829. [Google Scholar] [CrossRef]
- Jing, Y.; Li, Q.; Ye, W.; Liu, G. Development of a GNSS/INS-based Automatic Navigation Land Levelling System. Comput. Electron. Agric. 2022, 213, 108187. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Li, Y.; Chang, M.; Chen, Z.; Lan, Y.; Wu, C. Real-Time field road freespace extraction for agricultural machinery autonomous driving based on LiDAR. Comput. Electron. Agric. 2023, 211, 108028. [Google Scholar] [CrossRef]
- Yigit, C.O.; Bezcioglu, M.; Ilci, V.; Ozulu, I.M.; Alkan, R.M.; Dindar, A.A.; Karadeniz, B. Assessment of Real-Time PPP with Trimble RTX correction service for real-time dynamic displacement monitoring based on high-rate GNSS observations. Measurement 2022, 201, 111704. [Google Scholar] [CrossRef]
- Fue, K.; Porter, W.; Barnes, E.; Li, C.; Rains, G. Autonomous Navigation of a Center-Articulated and Hydrostatic Transmission Rover using a Modified Pure Pursuit Algorithm in a Cotton Field. Sensors 2020, 20, 4412. [Google Scholar] [CrossRef]
- Wang, L.; Li, L.; Qiu, R. Edge Computing-based Differential Positioning Method for BeiDou Navigation Satellite System. KSII Trans. Internet Inf. Syst. 2019, 13, 69–85. [Google Scholar] [CrossRef]
- Wang, H.; Noguchi, N. Navigation of a Robot Tractor Using the Centimeter Level Augmentation Information via Quasi-Zenith Satellite System. J. Jpn. Soc. Agric. Mach. Food Eng. 2019, 81, 250–255. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X. Present situation, problems and countermeasures of cotton production mechanization development in Xinjiang Production and Construction Corps. Trans. CSAE 2015, 31, 5–10. (In Chinese) [Google Scholar] [CrossRef]
- Zhao, X.; Wang, K.; Wu, S.; Wen, L.; Chen, Z.; Dong, L.; Sun, M.; Wu, C. An obstacle avoidance path planner for an autonomous tractor using the minimum snap algorithm. Comput. Electron. Agric. 2023, 207, 107738. [Google Scholar] [CrossRef]
- He, Y.; Zhou, J.; Sun, J.; Jia, H.; Liang, Z.; Awuah, E. An adaptive control system for path tracking of crawler combine harvester based on paddy ground conditions identification. Comput. Electron. Agric. 2023, 210, 107948. [Google Scholar] [CrossRef]
- Jing, Y.; Liu, G.; Luo, C. Path tracking control with slip compensation of a global navigation satellite system based tractor scraper land levelling system. Biosyst. Eng. 2021, 212, 360–377. [Google Scholar] [CrossRef]
- Huang, W.; Ji, X.; Wang, A.; Wang, Y.; Wei, X. Straight-Line Path Tracking Control of Agricultural Tractor-Trailer Based on Fuzzy Sliding Mode Control. Appl. Sci. 2023, 13, 872. [Google Scholar] [CrossRef]
- He, J.; Zhu, J.; Luo, X.; Zhang, Z.; Hu, L.; Gao, Y. Design of steering control system for rice transplanter equipped with steering wheel-like motor. Trans. CSAE 2019, 35, 10–17. (In Chinese) [Google Scholar] [CrossRef]
- Wu, C.; Wang, D.; Chen, Z.; Song, B.; Yang, L.; Yang, W. Autonomous driving and operation control method for SF2104 tractors. Trans. CSAE 2020, 36, 42–48. (In Chinese) [Google Scholar] [CrossRef]
- Alonso-Garcia, S.; Gomez-Gil, J.; Arribas, J.I. Evaluation of the use of low-cost GPS receivers in the autonomous guidance of agricultural tractors. Span. J. Agric. Res. 2011, 9, 377–388. [Google Scholar] [CrossRef]
- Gan-Mor, S.; Clark, R.L.; Upchurch, B.L. Implement lateral position accuracy under RTK-GPS tractor guidance. Comput. Electron. Agric. 2007, 59, 31–38. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Z.; Luo, X.; Wang, H.; Huang, P.; Zhang, J. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS. Trans. CSAE 2018, 34, 15–21. (In Chinese) [Google Scholar]
- Dutta, P.; Halder, T.; Banerjee, S.; Basak, A.; Nanda, S.; Chakravarty, D. Analysis of jamming and anti jamming techniques for Galileo GNSS. Mater. Today Proc. 2022, 58, 489–495. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, Z.; Yu, W.; Dai, W. Intersystem Bias in GPS, GLONASS, Galileo, BDS-3, and BDS-2 Integrated SPP: Characteristics and Performance Enhancement as a Priori Constraints. Remote Sens. 2021, 13, 4650. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Y.; Long, L.; Lu, Z.; Shi, J. Efficient and adaptive lidar-visual-inertial odometry for agricultural unmanned ground vehicle. Int. J. Adv Robot. Syst. 2022, 19, 17298806221094925. [Google Scholar] [CrossRef]
- Bakker, T.; Wouters, H.; Van, A.K.; Bontsema, J.; Tang, L.; Müller, J.; Van, S.G. A vision-based row detection system for sugar beet. Comput. Electron. Agric. 2008, 60, 87–95. [Google Scholar] [CrossRef]
- Radcliffe, J.; Cox, J.; Bulanon, D.M. Machine vision for orchard navigation. Comput. Ind. 2018, 98, 165–171. [Google Scholar] [CrossRef]
- Kanagasingham, S.; Ekpanyapong, M.; Chahan, R. Integrating machine vision-based row guidance with GPS and compass-based routing to achieve autonomous navigation for a rice field weeding robot. Precis. Agric. 2020, 21, 831–855. [Google Scholar] [CrossRef]
- Mahboub, V.; Mohammadi, D. A Constrained Total Extended Kalman Filter for Integrated Navigation. J. Navigat. 2018, 71, 971–988. [Google Scholar] [CrossRef]
- Ma, Z.; Yin, C.; Du, X.; Zhao, L.; Lin, L.; Zhang, G.; Wu, C. Rice row tracking control of crawler tractor based on the satellite and visual integrated navigation. Comput. Electron. Agric. 2022, 197, 106935. [Google Scholar] [CrossRef]
- Heikkinen, V.; Korpela, I.; Tokola, T.; Honkavaara, E.; Parkkinen, J. An SVM Classification of Tree Species Radiometric Signatures Based on the Leica ADS40 Sensor. IEEE. Trans. Geosci. Remote Sens. 2011, 49, 11. [Google Scholar] [CrossRef]
- Thanpattranon, P.; Ahamed, T.; Takigawa, T. Navigation of autonomous tractor for orchards and plantations using a laser range finder: Automatic control of trailer position with tractor. Biosyst. Eng. 2016, 147, 90–103. [Google Scholar] [CrossRef]
- Lyu, P.; Wang, B.; Lai, J.; Bai, S.; Liu, M.; Yu, W. A Factor Graph Optimization Method for High-Precision IMU-Based Navigation System. IEEE Trans. Instrum. Meas. 2023, 72, 9509712. [Google Scholar] [CrossRef]
- Li, S.; Zhang, M.; Ji, Y.; Zhang, Z.; Cao, R.; Chen, B.; Li, H.; Yin, Y. Agricultural machinery GNSS/IMU-integrated navigation based on fuzzy adaptive finite impulse response Kalman filtering algorithm. Comput. Electron. Agric. 2021, 191, 106524. [Google Scholar] [CrossRef]
- Wang, N. Satellite/Inertial Navigation Integrated Navigation Method Based on Improved Kalman Filtering Algorithm. Mob. Inf. Syst. 2022, 2022, 4627111. [Google Scholar] [CrossRef]
- Xin, X.; Lu, X.; Lu, Y.; Gao, L.; Yu, Z. Vehicle sideslip angle estimation by fusing inertial measurement unit and global navigation satellite system with heading alignment. Mech. Syst. Signal Process. 2021, 150, 107290. [Google Scholar] [CrossRef]
- Tian, Y.; Mai, Z.; Zeng, Z.; Cai, Y.; Yang, J.; Zhao, B.; Zhu, X.; Qi, L. Design and experiment of an integrated navigation system for a paddy field scouting robot. Comput. Electron. Agric. 2023, 214, 108336. [Google Scholar] [CrossRef]
- Liu, H.; Nassar, S.; Naser, E.S. Two-filter smoothing for accurate INS/GPS land—Vehicle navigation in urban centers. IEEE Trans. Veh. Technol. 2010, 59, 4256–4267. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, L.; Chang, M. A Design of an Unmanned Electric Tractor Platform. Agronomy 2022, 12, 112. [Google Scholar] [CrossRef]
- Kago, R.; Vellak, P.; Ehrpais, H.; Noorma, M.; Olt, J. Assessment of power characteristics of an unmanned tractor for operations on peat fields. Agron. Res. 2022, 20, 261–274. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, Z. Speed control strategy for tractor assisted driving based on chassis dynamometer test. Int. J. Agric. Biol. Eng. 2021, 14, 169–175. [Google Scholar] [CrossRef]
- Luo, C.; Wen, C.; Meng, Z.; Liu, H.; Li, G.; Fu, W.; Zhao, C. Research on the Slip Rate Control of a Power Shift Tractor Based on Wheel Speed and Tillage Depth Adjustment. Agronomy 2018, 13, 281. [Google Scholar] [CrossRef]
- Xia, J.; Li, D.; Liu, G.; Cheng, J.; Zheng, K.; Luo, C. Design and Test of Electro-hydraulic Monitoring Device for Hitch Tillage Depth Based on Measurement of Tractor Pitch Angle. Trans. CSAM 2021, 42, 386–395. (In Chinese) [Google Scholar] [CrossRef]
- Suomi, P.; Oksanen, T. Automatic working depth control for seed drill using ISO 11783 remote control messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
- Chen, K.; Zhao, B.; Zhou, L.; Wang, L.; Wang, Y.; Yuan, Y.; Zheng, Y. Real-time missed seeding monitoring planter based on ring-type capacitance detection sensor. Inmateh-Agric. Eng. 2021, 64, 279–288. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, H.; Zhang, D.; Cui, T.; Zhong, X.; Li, Y. Development and performance evaluation of an electric-hydraulic control system for a subsoiler with flexible tines. Comput. Electron. Agric. 2018, 151, 249–257. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Y.; Wang, H.; Mao, H.; Zhou, L. Research on accurate perception and control system of fertilization amount for corn fertilization planter. Front. Plant Sci. 2023, 13, 1074945. [Google Scholar] [CrossRef]
- Liu, W.; Hu, J.; Zhao, X.; Pan, H.; Lakhiar, I.A.; Wang, W. Development and experimental analysis of an intelligent sensor for monitoring seed flow rate based on a seed flow reconstruction technique. Comput. Electron. Agric. 2019, 164, 104899. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, X.; Tian, H.; Lu, Y.; Guo, C.; Liu, H. A fertilizer discharge detection system based on point cloud data and an efficient volume conversion algorithm. Comput. Electron. Agric. 2021, 185, 106131. [Google Scholar] [CrossRef]
- Govindaraju, M.; Fontanelli, D.; Kumar, S.S.; Pillai, A.S. Optimized Offline-Coverage Path Planning Algorithm for Multi-Robot for Weeding in Paddy Fields. IEEE Access. 2023, 11, 109868. [Google Scholar] [CrossRef]
- He, Z.; Bao, Y.; Yu, Q.; Lu, P.; He, Y.; Liu, Y. Dynamic path planning method for headland turning of unmanned agricultural vehicles. Comput. Electron. Agric. 2023, 206, 107699. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, G.; Chen, Z.; Wen, X.; Cheng, S.; Ma, Q.; Qi, J.; Zhou, Y.; Chen, L. An independent steering driving system to realize headland turning of unmanned tractors. Comput. Electron. Agric. 2022, 201, 107278. [Google Scholar] [CrossRef]
- Zheng, L.; Zhang, X.; Wang, J.; Wu, Y.; Li, H. Path planning of field robot based on macro-micro combination. Trans. CSAM 2023, 54, 13–26. (In Chinese) [Google Scholar] [CrossRef]
- Han, X.; Kim, H.J.; Jeon, C.W.; Moon, H.C.; Kim, J.H.; Seo, I.H. Design and field testing of a polygonal paddy infield path planner for unmanned tillage operations. Comput. Electron. Agric. 2021, 191, 106567. [Google Scholar] [CrossRef]
- Alshammrei, S.; Boubaker, S.; Kolsi, L. Improved Dijkstra algorithm for mobile robot path planning and obstacle avoidance. Comput. Mater. Contin. 2022, 72, 5939–5954. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Liu, G.; Li, R.; Li, F. Optimizing the Path of Plug Tray Seedling Transplanting by Using the Improved A* Algorithm. Agriculture 2022, 12, 1302. [Google Scholar] [CrossRef]
- Cui, Y.; Wang, Y.; He, Z.; Cao, D.; Ma, L.; Li, K. Global Path Planning of Kiwifruit Harvesting robot Based on the Improved RRT Algorithm. Trans. CSAM 2022, 53, 151–158. (In Chinese) [Google Scholar] [CrossRef]
- Cao, R.; Li, S.; Ji, Y.; Zhang, Z.; Xu, H.; Zhang, M.; Li, M.; Li, H. Task assignment of multiple agricultural machinery cooperation based on improved ant colony algorithm. Comput. Electron. Agric. 2021, 182, 105993. [Google Scholar] [CrossRef]
- He, Y.; Fan, X. Application of Improved Ant Colony Optimization in Robot Path Planning. Comput. Eng. Appl. 2021, 57, 276–282. [Google Scholar] [CrossRef]
- Wang, N.; Yang, X.; Wang, T.; Xiao, J.; Zhang, M.; Wang, H.; Li, H. Collaborative path planning and task allocation for multiple agricultural machines. Comput. Electron. Agric. 2023, 213, 108218. [Google Scholar] [CrossRef]
- İlhan, İ. An Improved Simulated Annealing Algorithm with Crossover Operator for Capacitated Vehicle Routing Problem. Swarm. Evol. Comput. 2021, 64, 100911. [Google Scholar] [CrossRef]
- Yang, L.; Wang, C.; Gao, L.; Song, Y.; Li, X. An improved simulated annealing algorithm based on residual network for permutation flow shop scheduling. Complex. Intell. Syst. 2021, 7, 1173–1183. [Google Scholar] [CrossRef]
- Khan, S.A.; Mahmood, A. Fuzzy goal programming-based ant colony optimization algorithm for multi-objective topology design of distributed local area networks. Neural Comput. Appl. 2019, 31, 2329–2347. [Google Scholar] [CrossRef]
- Yin, X.; Cai, P.; Zhao, K.; Zhang, Y.; Zhou, Q.; Yao, D. Dynamic Path Planning of AGV Based on Kinematic Constraint A* Algorithm and Following DWA Fusion Algorithms. Sensors 2023, 23, 4102. [Google Scholar] [CrossRef]
- Ge, Z.; Man, Z.; Wang, Z.; Bai, X.; Wang, X.; Xiong, F.; Li, D. Robust adaptive sliding mode control for path tracking of unmanned agricultural vehicles. Comput. Electr. Eng. 2023, 108, 108693. [Google Scholar] [CrossRef]
- Fan, X.; Wang, J.; Wang, H.; Yang, L.; Xia, C. LQR Trajectory Tracking Control of Unmanned Wheeled Tractor Based on Improved Quantum Genetic Algorithm. Machines 2023, 11, 62. [Google Scholar] [CrossRef]
- Raikwar, S.; Fehrmann, J.; Herlitzius, T. Navigation and control development for a four-wheel-steered mobile orchard robot using model-based design. Comput. Electron. Agric. 2022, 202, 107410. [Google Scholar] [CrossRef]
- Xu, L.; You, J.; Yuan, H. Real-Time Parametric Path Planning Algorithm for Agricultural Machinery Kinematics Model Based on Particle Swarm Optimization. Agriculture 2020, 13, 1960. [Google Scholar] [CrossRef]
- Joglekar, A.; Sathe, S.; Misurati, N.; Srinivasan, S.; Schmid, M.J.; Krovi, V. Deep Reinforcement Learning Based Adaptation of Pure-Pursuit Path tracking Control for Skid-Steered Vehicles. IFAC-PapersOnLine 2022, 55, 400–407. [Google Scholar] [CrossRef]
- Xu, L.; Yang, Y.; Chen, Q.; Fu, F.; Yang, B.; Yao, L. Path Tracking of a 4WIS-4WID Agricultural Machinery Based on Variable Look-Ahead Distance. Appl. Sci. 2022, 12, 8651. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Wen, X.; Zhang, G.; Ma, Q.; Cheng, S.; Qi, J.; Xu, L.; Chen, L. An optimal goal point determination algorithm for automatic navigation of agricultural machinery: Improving the tracking accuracy of the Pure Pursuit algorithm. Comput. Electron. Agric. 2022, 194, 106760. [Google Scholar] [CrossRef]
- Piron, D.; Pathak, S.; Deraemaeker, A.; Collette, C. On the link between pole-zero distance and maximum reachable damping in MIMO systems. Mech. Syst. Signal Process. 2022, 181, 109519. [Google Scholar] [CrossRef]
- Kayacan, E.; Ramon, H.; Saeys, W. Robust trajectory tracking error model-based predictive control for unmanned ground vehicles. IEEE. ASME. Trans. Mechatron. 2015, 21, 806–814. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, W.; Wang, N.; Lyu, Z.; Zhang, W. Trajectory tracking control of agricultural vehicles based on disturbance test. Int. J. Agric. Biol. Eng. 2020, 13, 138–145. [Google Scholar] [CrossRef]
- He, J.; Hu, L.; Wang, P.; Liu, Y.; Man, Z.; Tu, T.; Yang, L.; Li, Y.; Yi, Y.; Li, W.; et al. Path tracking control method and performance test based on agricultural machinery pose correction. Comput. Electron. Agric. 2022, 200, 107185. [Google Scholar] [CrossRef]
- Ko, H.S.; Lee, K.Y.; Kim, H.C. An intelligent-based LQR controller design to power system stabilization. Electr. Power Syst. Res. 2004, 71, 1–9. [Google Scholar] [CrossRef]
- Wang, L.; Ni, H.; Zhou, W.; Pardalos, P.M.; Fang, J.; Fei, M. MBPOA-based LQR controller and its application to the double-parallel inverted pendulum system. Eng. Appl. Artif. Intell. 2014, 36, 262–268. [Google Scholar] [CrossRef]
- Bevly, D.M.; Gerdes, J.C.; Parkinson, B.W. A new yaw dynamic model for improved high-speed control of a farm tractor. J. Dyn. Syst. Meas. Control 2002, 124, 659–667. [Google Scholar] [CrossRef]
- Cui, B.; Sun, Y.; Ji, F.; Wei, X.; Zhu, Y.; Zhang, S. Study on whole field path tracking of agricultural machinery based on fuzzy Stanley model. Trans. CSAM 2022, 53, 43–48+88. (In Chinese) [Google Scholar] [CrossRef]
- Bodur, M.; Kiani, E.; Hacısevki, H. Double look-ahead reference point control for autonomous agricultural vehicles. Biosyst. Eng. 2012, 113, 173–186. [Google Scholar] [CrossRef]
- Dong, F.; Heinemann, W.; Kasper, R. Development of a row guidance system for an autonomous robot for white asparagus harvesting. Comput. Electron. Agric. 2011, 79, 216–225. [Google Scholar] [CrossRef]
- Murakami, N.; Ito, A.; Will, J.D.; Steffen, M.; Inoue, K.; Kita, K.; Miyaura, S. Development of a teleoperation system for agricultural vehicles. Comput. Electron. Agric. 2008, 63, 81–88. [Google Scholar] [CrossRef]
- Gao, L.; Hu, J.; Li, T. DMC-PD cascade control method of the automatic steering system in the navigation control of agricultural machines. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 27–30 June 2014. [Google Scholar] [CrossRef]
- He, J.; Man, Z.; Hu, L.; Luo, X.; Wang, P.; Li, M.; Li, W. Path tracking control method and experiments for the crawler-mounted peanut combine harvester. Trans. CSAE 2023, 39, 9–17. (In Chinese) [Google Scholar] [CrossRef]
- Li, L.; Wang, H.; Lian, J.; Ding, X.; Cao, W. A Lateral Control Method of Intelligent Vehicle Based on Fuzzy Neural Network. Adv. Mech. Eng. 2015, 7, 296209. [Google Scholar] [CrossRef]
- Vargas-Meléndez, L.; Boada, B.L.; Boada, M.J.L.; Gauchía, A.; Díaz, V. A Sensor Fusion Method Based on an Integrated Neural Network and Kalman Filter for Vehicle Roll Angle Estimation. Sensors 2016, 16, 1400. [Google Scholar] [CrossRef] [PubMed]
- Meng, Q.; Qiu, R.; Zhang, M.; Liu, G.; Zhang, Z.; Xiang, M. Navigation System of Agricultural Vehicle Based on Fuzzy Logic Controller with Improved Particle Swarm Optimization Algorithm. Trans. CSAM 2015, 46, 43–48+88. (In Chinese) [Google Scholar] [CrossRef]
- Xue, J.; Zhang, L.; Grift, T.E. Variable field-of-view machine vision-based row guidance of an agricultural robot. Comput. Electron. Agric. 2012, 84, 176–185. [Google Scholar] [CrossRef]
- Kumar, S.; Ajmeri, M. Optimal variable structure control with sliding modes for unstable processes. J. Cent. South. Univ. 2021, 28, 3147–3158. [Google Scholar] [CrossRef]
- Li, Z.; Chen, L.; Zheng, Q.; Dou, X.; Lu, Y. Control of a path following caterpillar robot based on a sliding mode variable structure algorithm. Biosyst. Eng. 2019, 186, 293–306. [Google Scholar] [CrossRef]
- Jia, Q.; Zhang, X.; Yuan, Y.; Fu, T.; Wei, L.; Zhao, B. Fault-tolerant adaptive sliding mode control method of tractor automatic steering system. Trans. CSAE 2018, 34, 76–84. (In Chinese) [Google Scholar] [CrossRef]
- He, Z.; Song, Z.; Wang, L.; Zhou, X.; Gao, J.; Wang, K.; Yang, M.; Li, Z. Fasting the stabilization response for prevention of tractor rollover using active steering: Controller parameter optimization and real-vehicle dynamic tests. Comput. Electron. Agric. 2023, 204, 107525. [Google Scholar] [CrossRef]
- Hu, J.; Gao, L.; Bai, X.; Li, T.; Liu, X. Review of research on automatic guidance of agricultural vehicles. Trans. CSAE 2015, 31, 1–10. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, M.; Xiang, M.; Wei, S.; Ji, Y.; Qiu, R.; Meng, Q. Design and Implementation of a Corn Weeding-cultivating Integrated Navigation System Based on GNSS and MV. Trans. CSAM 2015, 16, 8–14. (In Chinese) [Google Scholar] [CrossRef]
- Li, W.; Xue, T.; Mao, E.; Du, Y.; Li, Z.; He, X. Design and Experiment of Multifunctional Steering System for High Clearance Self-propelled Sprayer. Trans. CSAM 2019, 50, 141–151. [Google Scholar] [CrossRef]
- Yue, G.; Pan, Y. Intelligent control system of agricultural unmanned tractor tillage trajectory. J. Intell. Fuzzy Syst. 2020, 38, 7449–7459. [Google Scholar] [CrossRef]
- Xu, G.; Chen, M.; He, X.; Liu, Y.; Wu, J.; Diao, P. Research on state-parameter estimation of unmanned Tractor-A hybrid method of DEKF and ARBFNN. Eng. Appl. Artif. Intell. 2024, 127, 107402. [Google Scholar] [CrossRef]
- Li, Y.; Cao, Q.; Liu, F. Design of control system for driverless tractor. MATEC Web Conf. 2020, 309, 04001. [Google Scholar] [CrossRef]
- Zhou, X.; Zhao, W.; Wang, C.; Luan, Z. Energy analysis and optimization design of vehicle electro-hydraulic compound steering system. Appl. Energy 2019, 255, 113713. [Google Scholar] [CrossRef]
- Davis, R.I.; Burns, A.; Bril, R.J.; Lukkien, J.J. Controller area network(CAN) schedulability analysis: Refuted, revisited and revised. Real-Time Syst. 2007, 35, 239–272. [Google Scholar] [CrossRef]
- Rohrer, R.A.; Pitla, S.K.; Luck, J.D. Tractor CAN bus interface tools and application development for real-time data analysis. Comput. Electron. Agric. 2019, 163, 104847. [Google Scholar] [CrossRef]
- Marx, S.E.; Luck, J.D.; Pitla, S.K.; Hoy, R.M. Comparing various hardware/software solutions and conversion methods for Controller Area Network (CAN) bus data collection. Comput. Electron. Agric. 2016, 128, 141–148. [Google Scholar] [CrossRef]
- Liu, M.; Han, B.; Xu, L.; Li, Y. CAN bus network design of bifurcated power electric tractor. Peer Peer Netw. Appl. 2021, 14, 2306–2315. [Google Scholar] [CrossRef]
- ISO-International Organization for Standardization. Tractors and Machinery for Agriculture and Forestry-Serial Control and Communications Data Network. 2017. Available online: https://www.iso.org/standard/57556.html (accessed on 17 March 2024).
- Zhang, J.; Feng, G.; Yan, X.; He, Y.; Liu, M.; Xu, L. Cooperative control method considering efficiency and tracking performance for unmanned hybrid tractor based on rotary tillage prediction. Energy 2024, 288, 129874. [Google Scholar] [CrossRef]
- Crisnapati, P.N.; Maneetham, D. Two-dimensional path planning platform for autonomous walk behind hand tractor. Agriculture 2022, 12, 2051. [Google Scholar] [CrossRef]
- Bakker, T.; Asselt, K.v.; Bontsema, J.; Henten, E.J.v. Robotic weeding of a maize field based on navigation data of the tractor that performed the seeding. IFAC Proc. 2010, 43, 157–159. [Google Scholar] [CrossRef]
- Pan, Y.; Hu, K.; Cao, H.; Kang, H.; Wang, X. A novel perception and semantic mapping method for robot autonomy in orchards. Comput. Electron. Agric. 2024, 219, 108769. [Google Scholar] [CrossRef]
- Hensh, S.; Raheman, H. An unmanned wetland paddy seeder with mechatronic seed metering mechanism for precise seeding. Comput. Electron. Agric. 2022, 203, 107463. [Google Scholar] [CrossRef]
- Minn, A.; Abeyrathna, R.M.R.D.; Nakaguchi, V.M.; Ahamed, T. Development of a 3D printed new metering mechanism for a multi-crop seed broadcasting system using an autonomous small-scale vehicle. Inventions 2023, 8, 69. [Google Scholar] [CrossRef]
- Shang, Y.; Wang, H.; Qin, W.; Wang, Q.; Liu, H.; Yin, Y.; Song, Z.; Meng, Z. Design and test of obstacle detection and harvester pre-collision system based on 2D lidar. Agronomy 2023, 13, 388. [Google Scholar] [CrossRef]
- Anzai, H.; Sakurai, H. Preliminary study on the application of robotic herding to manipulation of grazing distribution: Behavioral response of cattle to herding by an unmanned vehicle and its manipulation performance. Appl. Anim. Behav. Sci. 2022, 256, 105751. [Google Scholar] [CrossRef]
- Feng, Q.; Wang, X.; Qiu, Q.; Zhang, C.; Li, B.; Xu, R.; Chen, L. Design and test of disinfection robot for livestock and poultry house. Smart Agric. 2020, 2, 79–88. (In Chinese) [Google Scholar] [CrossRef]
- Mattetti, M.; Michielan, E.; Mantovani, G.; Varani, M. Objective evaluation of gearshift process of agricultural tractors. Biosyst. Eng. 2022, 224, 324–335. [Google Scholar] [CrossRef]
- YTO GROUP. Available online: http://www.ytgroup.cn/xwdt_5457/mtgz/202309/t20230928_422885.html (accessed on 15 March 2024).
- JOHN DEERE. Available online: https://www.deere.co.uk/en/agriculture/future-of-farming/ (accessed on 15 March 2024).
- Wang, G.; Song, Y.; Wang, J.; Xiao, M.; Cao, Y.; Chen, W.; Wang, J. Shift quality of tractors fitted with hydrostatic power split CVT during starting. Biosyst. Eng. 2020, 196, 183–201. [Google Scholar] [CrossRef]
- Yao, Z.; Zhao, C.; Zhang, T. Agricultural machinery automatic navigation technology. iScience 2024, 27, 108714. [Google Scholar] [CrossRef]
- Luo, X.; Hu, L.; He, J.; Zhang, Z.; Zhou, Z.; Zhang, W.; Liao, J.; Huang, P. Key technologies and practice of unmanned farm in China. Trans. CSAE 2024, 40, 1–16. (In Chinese) [Google Scholar] [CrossRef]
- Sunusi, I.I.; Zhou, J.; Wang, Z.; Sun, C.; Ibrahim, I.E.; Opiyo, S.; Korohou, T.; Soomro, S.A.; Sale, N.A.; Olanrewaju, T.O. Intelligent tractors: Review of online traction control process. Comput. Electron. Agric. 2020, 170, 105176. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation State | Perception Method | Advantages | Disadvantages |
|---|---|---|---|
| Vehicle Speed [46] | Radar speedometer, ground wheel, and GPS | Accurate ground wheel measurements at low speeds, accurate radar and GPS measurements at high speeds [47] | Inability to achieve high detection accuracy from low to high speeds |
| Tillage Depth [48] | Indirect detection using dual inclinometers, depth measurement using suspension angle sensors | Overcoming errors caused by field residue coverage and machinery vibration | Indirect calculation of tillage depth based on complex mathematical models with limited universality |
| Seeding Depth [49] | Combination of angle sensors and ultrasonic sensors | High stability and accuracy | Specific to the type of seed unit |
| Fertilizer Application [50] | Weighing by load cells with smart noise filtering | Simple structure, low cost, and high accuracy | Lack of long-term stability |
| Types | Algorithm | Advantages | Disadvantages |
|---|---|---|---|
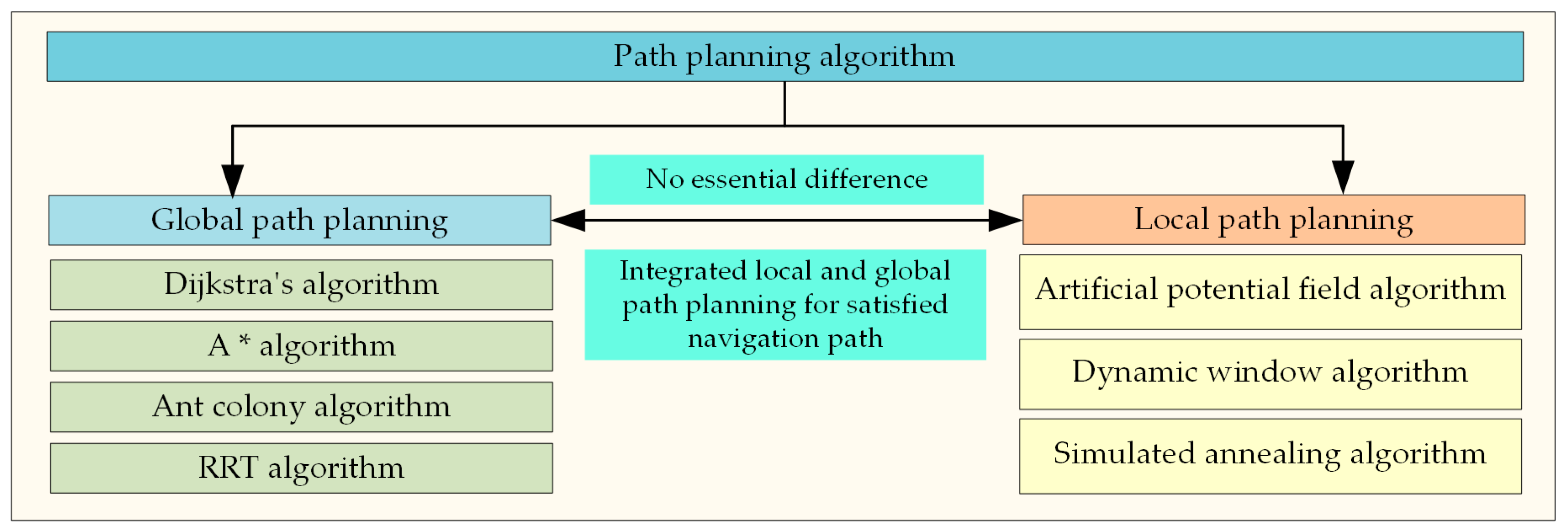
| Global Path Planning | Dijkstra’s algorithm | High accuracy, high success rate, good robustness | High complexity, low efficiency, time-consuming |
| A* algorithm | Optimality, completeness, efficiency | Low efficiency, high complexity | |
| Ant colony algorithm | Positive feedback, strong robustness, strong adaptability | high complexity, prone to local convergence, low accuracy | |
| RRT algorithm | Simple algorithm, simple structure, strong applicability | High spatial complexity | |
| Local Path Planning | Artificial potential field algorithm | Low complexity, small computational load, good real-time performance | Easily trapped in local minima |
| Simulated annealing algorithm | Strong global optimization capability, easy implementation, high efficiency | Slow convergence, randomness involved | |
| Dynamic window algorithm | Low complexity, efficiency, good robustness | Speed and safety cannot be simultaneously optimized |
| Algorithms | Advantages | Disadvantages |
|---|---|---|
| Pure pursuit method | Easy to calculate, easy to implement, strong robustness | Moderate accuracy and limited to low-speed scenarios |
| Pole-zero configuration | High stability, fast response | Not suitable for complex systems |
| Model predictive control | Suitable for large curvature conditions | Not suitable for high-speed conditions |
| Linear quadratic regulator | Easy to design and to implement | Strong dependence on model accuracy, not suitable for paths with large curvature |
| Control Method | Modeling | Applicable Systems | Advantages | Disadvantages |
|---|---|---|---|---|
| PID Control | No | Linear | Robustness, simple structure, easy implementation | Trade-off between overshoot and response time |
| Neural Networks | Yes | Nonlinear | Strong adaptability, robustness, high precision | Slow convergence, susceptibility to local optima |
| Fuzzy Control | No | Nonlinear | Robustness, adaptability, disturbance rejection, stability | Lower control precision, static error |
| Sliding Mode Control | No | Nonlinear | Robustness, fast response, simple implementation | Potential high-frequency oscillations |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, J.; Zhang, Z.; Qin, Z.; Guo, K.; Li, D. Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review. Machines 2024, 12, 218. https://doi.org/10.3390/machines12040218
Qu J, Zhang Z, Qin Z, Guo K, Li D. Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review. Machines. 2024; 12(4):218. https://doi.org/10.3390/machines12040218
Chicago/Turabian StyleQu, Jiwei, Zhe Zhang, Zheyu Qin, Kangquan Guo, and Dan Li. 2024. "Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review" Machines 12, no. 4: 218. https://doi.org/10.3390/machines12040218
APA StyleQu, J., Zhang, Z., Qin, Z., Guo, K., & Li, D. (2024). Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review. Machines, 12(4), 218. https://doi.org/10.3390/machines12040218