
Robust Combined Adaptive Passivity-Based Control for Induction Motors



Abstract
:1. Introduction
- Proposing a novel CAPBC. This paper proposes a novel CAPBC technique that extends the existing DAPBC scheme from [27]. Compared with previous works [41,42,43], the CAPBC can handle a wider range of MIMO NLDS with bounded external disturbance and unmodeled dynamic. In contrast to [44,45,46,48], the proposal considers the estimation error originally proposed by [41,42,43].
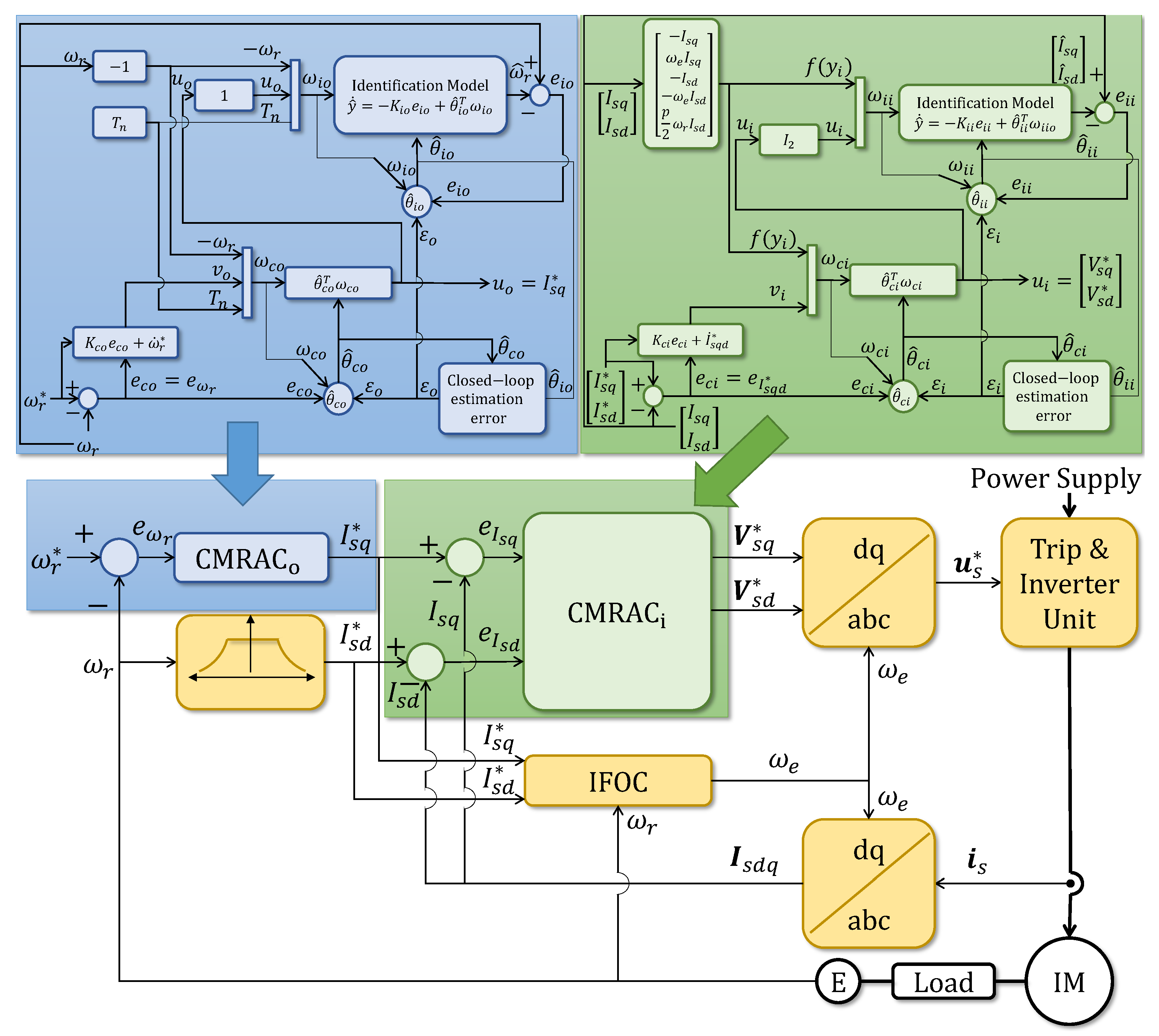
- Implementing a SISO CAPBC angular speed control. The proposed technique is applied to the outer loop of an IFOC for IMs, where it controls the angular speed. Implementing the CAPBC is more complex than the DAPBC from [27] but improves performance by incorporating online parameter adaptive estimation. The controller does not require knowledge of the motor load mechanical parameters, unlike the PIC.
- Implementing a MIMO CAPBC d-q axis current control. The proposed technique is also applied to the inner loop of an IFOC for IMs, where it controls the stator current vector components. In contrast to previous works [44,45,46,48], the CAPBC can handle systems with an utterly unknown B with a known control direction (KCD), which is the case for IMs.
2. Preliminaries
2.1. d-q IM Dynamic Model and IFOC Diagram
2.2. PIC Adjustment
2.3. CMRAC Basis to Be Expanded for CAPBC
3. Proposed CAPBC
4. Experimental Results
- PIC (4) and (5). These controllers were adjusted as described in Section 2.2 and using the motor load parameter values from [16] (Tables III, IM 2) that followed the IEEE standard 112A, including DC injection, locked rotor, and free load [13] (Section 5.9).
- Proposed CAPBC from Theorem 1. It also uses both a SISO controller and a MIMO controller , as in Figure 4.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| IMs | Induction motors |
| DC | Direct current |
| AC | Alternating current |
| D | Direct approach |
| I | Indirect approach |
| C | Combined approach |
| VSDs | Variable speed drives |
| FOC | Field-oriented control |
| VSDs | Variable speed drives |
| DTC | Direct torque control |
| IFOC | Indirect field-oriented control |
| LDS | Linear dynamical systems |
| NLDS | Nonlinear dynamical systems |
| PIC | Proportional and integral controller |
| MRAC | Model reference adaptive control |
| DMRAC | Direct model reference adaptive control |
| CMRAC | Combined model reference adaptive control |
| APBC | Adaptive passivity-based control |
| DAPBC | Direct adaptive passivity-based control |
| SMC | Sliding mode control |
| ANN | Artificial neural network |
| PSO | Particle swarm optimization technique |
| SISO | Single-input and single-output |
| MIMO | Multiple-input and multiple-output |
| KCD | Known control direction |
| PWM | Pulse width modulation |
| Ess [%] | Steady-state error computed as at the response ending |
| MO [%] | Maximum overshoot calculated as at the response starting |
| IAE [cm.s] | Integral absolute value Error of the output |
| ISI [] | Integral squared output |
| Mathematical Operators | |
| Continuous first-time derivative of x. | |
| Estimated variable or parameter x. | |
| Set-point or required output variable y. | |
| e,m | Referred to electrical e and mechanical m. |
| i,o | Inner and outer variable. |
| Transpose vector variable y. | |
| , and | Functions of the variable y. |
| Main Notation | |
| The following main notations are used in this manuscript: | |
| , | Rotor and electrical angular speed |
| Rotor position | |
| Stator voltage | |
| Stator current | |
| , , and | Electromagnetic, load, and nominal torque. |
| p | Number of poles |
| and | Stator and rotor resistance |
| and | Stator and rotor leakage inductance |
| , , and | Stator, rotor, and magnetizing inductance |
| Leakage or coupling coefficient, given by | |
| Stator transient resistance, with | |
| Stator transient time constant. Given by | |
| Rotor time constant | |
| , and | Electrical and mechanical time constant |
| Mechanical friction factor | |
| J | Moment of inertia |
| , and | Direct and quadrature stator current amplitudes |
| , and | Direct and quadrature stator voltage amplitudes |
| , and | Direct and quadrature stator current errors |
| Rotor angular speed error | |
| , and | Direct and quadrature rotor flux amplitudes |
| Constant | |
| and | PICs proportional and integral parameters |
| , and | Inverter and speed sensor gain |
| Damping coefficient | |
| Natural frequency | |
| y, and | Plant and reference model output |
| a, b, A, B, and | Plant parameters |
| , , , , and | Model parameters |
| , and | Control and identification errors |
| , and | Adaptive parameters for control and for identification |
| , and | Control and identification vector information |
| , and | Vectors containing the upper operational range of each element of and |
| Closed-loop estimation error | |
| Disturbance portion | |
| Unmodeled dynamics | |
| , and | Gradients of the design Lyapunov-type energy functions |
| , and | Positive-definite constants |
| , and | Auxiliary known parameters |
| , and | Identity matrix of order m and n |
| , and | Null matrix of order m and n |
| , and | Control, identification, and closed-loop estimation error gains |
| , and | Forgetting factors |
Appendix A. IFOC Method Basis
Appendix B. PIC Adjustment


Appendix C. CAPBC Stability Proof
References
- Ivanov-Smolenskij, A.; Kuznecov, B. Electrical Machines: Vol. 1; Mir: Moscow, Russia, 1983. [Google Scholar]
- Hannan, M.; Ali, J.A.; Mohamed, A.; Hussain, A. Optimization techniques to enhance the performance of induction motor drives: A review. Renew. Sustain. Energy Rev. 2018, 81, 1611–1626. [Google Scholar] [CrossRef]
- Travieso-Torres, J.C.; Contreras-Jara, C.; Diaz, M.; Aguila-Camacho, N.; Duarte-Mermoud, M.A. New Adaptive Starting Scalar Control Scheme for Induction Motor Variable Speed Drives. IEEE Trans. Energy Convers. 2021, 37, 729–736. [Google Scholar] [CrossRef]
- Depenbrock, M. Direkte selbstregelung (DSR) für hochdynamische drehfeldantriebe mit stromrichterspeisung. etz-Archiv 1985, 7, 211–218. [Google Scholar]
- Vas, P. Sensorless Vector and Direct Torque Control. Oxf. Univ. Press Google Sch. 1998, 2, 265–273. [Google Scholar]
- Hasse, K. Zur Dynamic Drehzahlgeregelter Antriebe mit Stromaschinen. Ph.D. Thesis, Technische Hochschule Darmstadt, Darmstadt, Germany, 1969. [Google Scholar]
- Blaschke, F. The principle of field orientation as applied to the new transvector closed-loop control system for rotating-field machine. Siemens Rev. 1772, 34, 217–220. [Google Scholar]
- Desoer, C.; Lin, C.A. Tracking and disturbance rejection of MIMO nonlinear systems with PI controller. IEEE Trans. Autom. Control 1985, 30, 861–867. [Google Scholar] [CrossRef]
- Ogata, K. Ingeniería de Control Moderna; Pearson Educación: London, UK, 2003. [Google Scholar]
- Sengamalai, U.; Anbazhagan, G.; Thamizh Thentral, T.; Vishnuram, P.; Khurshaid, T.; Kamel, S. Three phase induction motor drive: A systematic review on dynamic modeling, parameter estimation, and control schemes. Energies 2022, 15, 8260. [Google Scholar] [CrossRef]
- Amaral, G.F.V.; Baccarini, J.M.R.; Coelho, F.C.R.; Rabelo, L.M. A high precision method for induction machine parameters estimation from manufacturer data. IEEE Trans. Energy Convers. 2020, 36, 1226–1233. [Google Scholar] [CrossRef]
- Perin, M.; Pereira, L.A.; Silveira, G.B.; Haffner, S. Estimation of the parameters for multi-cage models of induction motors using manufacturer data and PSO. In Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2023; pp. 1–19. [Google Scholar]
- Engineers, E.; Board, I. 112-2017—IEEE Standard Test Procedure for Polyphase Induction Motors and Generators; IEEE: Piscataway, NJ, USA, 2018; pp. 1–115. [Google Scholar] [CrossRef]
- Yoo, J.; Lee, J.H.; Sul, S.K. FEA-Assisted Experimental Parameter Map Identification of Induction Motor for Wide-Range Field-Oriented Control. IEEE Trans. Power Electron. 2023, 39, 1353–1363. [Google Scholar] [CrossRef]
- Véliz-Tejo, A.; Travieso-Torres, J.C.; Peters, A.A.; Mora, A.; Leiva-Silva, F. Normalized-Model Reference System for Parameter Estimation of Induction Motors. Energies 2022, 15, 4542. [Google Scholar] [CrossRef]
- Travieso-Torres, J.C.; Lee, S.S.; Veliz-Tejo, A.; Leiva-Silva, F.; Ricaldi-Morales, A. Self-Commissioning Parameter Estimation Algorithm for Loaded Induction Motors. IEEE Trans. Ind. Electron. 2024, 1–11. [Google Scholar] [CrossRef]
- Travieso-Torres, J.C.; Duarte-Mermoud, M.A. Two simple and novel SISO controllers for induction motors based on adaptive passivity. ISA Trans. 2008, 47, 60–79. [Google Scholar] [CrossRef] [PubMed]
- Talla, J.; Leu, V.Q.; Šmídl, V.; Peroutka, Z. Adaptive speed control of induction motor drive with inaccurate model. IEEE Trans. Ind. Electron. 2018, 65, 8532–8542. [Google Scholar] [CrossRef]
- Kilic, E.; Ozcalik, H.R.; Yilmaz, S. Efficient speed control of induction motor using RBF based model reference adaptive control method. Autom. Časopis Za Autom. Mjer. Elektron. Računarstvo I Komun. 2016, 57, 714–723. [Google Scholar] [CrossRef]
- Zellouma, D.; Bekakra, Y.; Benbouhenni, H. Field-oriented control based on parallel proportional–integral controllers of induction motor drive. Energy Rep. 2023, 9, 4846–4860. [Google Scholar] [CrossRef]
- Sudheer, A.; Aware, M.V. Improved fractional order speed controller with non-linear vsi-im model to enhance the load disturbance capability. ISA Trans. 2023, 142, 538–549. [Google Scholar] [CrossRef] [PubMed]
- Aziz, A.G.M.A.; Abdelaziz, A.Y.; Ali, Z.M.; Diab, A.A.Z. A comprehensive examination of vector-controlled induction motor drive techniques. Energies 2023, 16, 2854. [Google Scholar] [CrossRef]
- Adigintla, S.; Aware, M.V. Robust fractional order speed controllers for induction motor under parameter variations and low speed operating regions. IEEE Trans. Circuits Syst. II Express Briefs 2022, 70, 1119–1123. [Google Scholar] [CrossRef]
- Zellouma, D.; Bekakra, Y.; Benbouhenni, H. Robust synergetic-sliding mode-based-backstepping control of induction motor with MRAS technique. Energy Rep. 2023, 10, 3665–3680. [Google Scholar] [CrossRef]
- Ali, S.; Prado, A.; Pervaiz, M. Hybrid backstepping-super twisting algorithm for robust speed control of a three-phase induction motor. Electronics 2023, 12, 681. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. Multilayer neurocontrol of high-order uncertain nonlinear systems with active disturbance rejection. Int. J. Robust Nonlinear Control 2024, 34, 2972–2987. [Google Scholar] [CrossRef]
- Travieso-Torres, J.C.; Duarte-Mermoud, M.A.; Díaz, M.; Contreras-Jara, C.; Hernández, F. Closed-Loop Adaptive High-Starting Torque Scalar Control Scheme for induction Motor Variable Speed Drives. Energies 2022, 15, 3489. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; PTR Prentice-Hall: Upper Saddle River, NJ, USA, 1996; Volume 1. [Google Scholar]
- Åström, K.J.; Wittenmark, B. Adaptive Control; Courier Corporation: North Chelmsford, MA, USA, 2008. [Google Scholar]
- Narendra, K.; Annaswamy, A. Stable Adaptive Systems; Dover Books on Electrical Engineering; Dover Publications: Mineola, NY, USA, 2012. [Google Scholar]
- Tiwari, M.; Prazenica, R.; Henderson, T. Direct adaptive control of spacecraft near asteroids. Acta Astronaut. 2023, 202, 197–213. [Google Scholar] [CrossRef]
- Artuc, M.B.; Bayezit, I. Robust adaptive quadrotor position tracking control for uncertain and fault conditions. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2023, 237, 3172–3184. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, C.; Huang, J.; Chen, H. Model-free adaptive control for unmanned surface vessels: A literature review. Syst. Sci. Control Eng. 2024, 12, 2316170. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, Y.; Zhang, O.; Chen, W.; Wang, J.; Gao, Y.; Liu, J. A Novel Faster Fixed-Time Adaptive Control for Robotic Systems With Input Saturation. IEEE Trans. Ind. Electron. 2023, 71, 5215–5223. [Google Scholar] [CrossRef]
- Burghi, T.; Iossaqui, J.; Camino, J. A general update rule for Lyapunov-based adaptive control of mobile robots with wheel slip. Int. J. Adapt. Control Signal Process. 2024, 38, 1172–1198. [Google Scholar] [CrossRef]
- Mirzaee, M.; Kazemi, R. Direct adaptive fractional-order non-singular terminal sliding mode control strategy using extreme learning machine for position control of 5-DOF upper-limb exoskeleton robot systems. Trans. Inst. Meas. Control 2024, 01423312231225605. [Google Scholar] [CrossRef]
- Abubakr, H.; Vasquez, J.C.; Mohamed, T.H.; Guerrero, J.M. The concept of direct adaptive control for improving voltage and frequency regulation loops in several power system applications. Int. J. Electr. Power Energy Syst. 2022, 140, 108068. [Google Scholar] [CrossRef]
- Travieso-Torres, J.C.; Ricaldi-Morales, A.; Véliz-Tejo, A.; Leiva-Silva, F. Robust Cascade MRAC for a Hybrid Grid-Connected Renewable Energy System. Processes 2023, 11, 1774. [Google Scholar] [CrossRef]
- Karami-Mollaee, A.; Barambones, O. Higher Order Sliding Mode Control of MIMO Induction Motors: A New Adaptive Approach. Mathematics 2023, 11, 4558. [Google Scholar] [CrossRef]
- Çavuş, B.; Aktaş, M. A New Adaptive Terminal Sliding Mode Speed Control in Flux Weakening Region for DTC Controlled Induction Motor Drive. IEEE Trans. Power Electron. 2023, 39, 449–458. [Google Scholar] [CrossRef]
- Duarte, M.A.; Narendra, K.S. Combined direct and indirect approach to adaptive control. IEEE Trans. Autom. Control 1989, 34, 1071–1075. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Rojo, F.A.; Pérez, R. Experimental evaluation of combined model reference adaptive controller in a pH regulation process. Int. J. Adapt. Control Signal Process. 2002, 16, 85–106. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Rioseco, J.S.; González, R.I. Control of longitudinal movement of a plane using combined model reference adaptive control. Aircr. Eng. Aerosp. Technol. 2005, 77, 199–213. [Google Scholar] [CrossRef]
- Lavretsky, E. Combined/composite model reference adaptive control. IEEE Trans. Autom. Control 2009, 54, 2692–2697. [Google Scholar] [CrossRef]
- Xie, J.; Yan, H.; Li, S.; Yang, D. Almost output regulation model reference adaptive control for switched systems: Combined adaptive strategy. Int. J. Syst. Sci. 2020, 51, 556–569. [Google Scholar] [CrossRef]
- Roy, S.B.; Bhasin, S.; Kar, I.N. Combined MRAC for unknown MIMO LTI systems with parameter convergence. IEEE Trans. Autom. Control 2017, 63, 283–290. [Google Scholar] [CrossRef]
- Makavita, C.D.; Nguyen, H.D.; Ranmuthugala, D.; Jayasinghe, S.G. Composite model reference adaptive control for an unmanned underwater vehicle. Underw. Technol. 2015, 33, 81–93. [Google Scholar] [CrossRef]
- Abdul Ghaffar, A.F.; Richardson, T.; Greatwood, C. A combined model reference adaptive control law for multirotor UAVs. IET Control Theory Appl. 2021, 15, 1474–1487. [Google Scholar] [CrossRef]
- Vas, P. Electrical Machines and Drives: A Space-Vector Theory Approach; Clarendon Press Oxford: Oxford, UK, 1992; Volume 1. [Google Scholar]
- Park, R.H. Two-reaction theory of synchronous machines generalized method of analysis-part I. Trans. Am. Inst. Electr. Eng. 1929, 48, 716–727. [Google Scholar] [CrossRef]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Siemens. Vector Control Simovert Masterdrives VC, Single-Motor and Multi-Motor Drives 0.55 kW to 2300 kW, Catalog DA 65.10 • 2003/2004; Siemens AG: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Schiff, J.L. The Laplace Transform: Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Travieso-Torres, J.C.; Contreras, C.; Hernández, F.; Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Orchard, M.E. Adaptive passivity-based control extended for unknown control direction. ISA Trans. 2022, 122, 398–408. [Google Scholar] [CrossRef] [PubMed]
- Feraga, C.E.; Sedraoui, M.; Bachir Bouiadjra, R. Enhanced Indirect Field-Oriented Control of Single-Phase Induction Motor Drive Using H∞ Current Controller. Arab. J. Sci. Eng. 2019, 44, 7187–7202. [Google Scholar] [CrossRef]
- Cao, P.; Zhang, X.; Yang, S. A unified-model-based analysis of MRAS for online rotor time constant estimation in an induction motor drive. IEEE Trans. Ind. Electron. 2017, 64, 4361–4371. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tests | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Performance Index | Time [s] | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 | 5.0 | 6.0 | 7.0 | 9.0 |
| 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 0.80 | 1.10 | ||
| [% ] | 66.0 | 66.0 | 66.0 | 66.0 | 66.0 | 40.0 | 66.0 | 66.0 | 66.0 | |
| Speed [rad/s] | 25.0 | 60.0 | 85.0 | 120 | 152.36 | 150 | 152.36 | 152.36 | 152.36 | |
| Ess [%] (Ending) | PI | 0.1299 | 0.1212 | 0.1237 | 0.1189 | 0.0180 | 0.0307 | 0.0254 | 0.0243 | 0.0851 |
| DAPBC | 0.0850 | 0.0302 | 0.0804 | 0.0100 | 0.0063 | 0.0079 | 0.0195 | 0.0227 | 0.0468 | |
| CAPBC | 0.0512 | 0.0269 | 0.0659 | 0.0066 | 0.0029 | 0.0068 | 0.0190 | 0.0139 | 0.0171 | |
| MO [%] (Starting) | PI | 5.5983 | 10.6929 | 7.1124 | 5.3479 | 4.3302 | 4.1276 | 0.2338 | 2.7979 | 3.5007 |
| DAPBC | 3.5168 | 1.7019 | 1.1308 | 0.8651 | 0.7095 | 0.3595 | 0.2139 | 0.1751 | 0.3143 | |
| CAPBC | 3.4904 | 1.4038 | 0.8367 | 0.5941 | 0.4640 | 0.2938 | 0.1923 | 0.1663 | 0.1667 | |
| IAE [cm.s] | PI | 0.6491 | 0.6494 | 0.6501 | 0.6519 | 0.6541 | 0.6544 | 1.043 | 1.52 | 2.2654 |
| DAPBC | 0.0152 | 0.0198 | 0.0359 | 0.0368 | 0.0378 | 0.0529 | 0.0663 | 0.0694 | 0.1507 | |
| CAPBC | 0.0099 | 0.0059 | 0.0072 | 0.0102 | 0.0223 | 0.0356 | 0.0437 | 0.0452 | 0.1425 | |
| ISI [] | PI | 0.2785 | 0.2649 | 0.2656 | 0.2664 | 0.2672 | 0.3915 | 0.8797 | 1.1001 | 3.3045 |
| DAPBC | 0.2616 | 0.2619 | 0.2623 | 0.2625 | 0.2632 | 0.3907 | 0.8752 | 0.9837 | 3.3018 | |
| CAPBC | 0.2592 | 0.2594 | 0.2610 | 0.2624 | 0.2634 | 0.3900 | 0.8689 | 0.9729 | 3.3016 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Travieso-Torres, J.C.; Ricaldi-Morales, A.J.; Aguila-Camacho, N. Robust Combined Adaptive Passivity-Based Control for Induction Motors. Machines 2024, 12, 272. https://doi.org/10.3390/machines12040272
Travieso-Torres JC, Ricaldi-Morales AJ, Aguila-Camacho N. Robust Combined Adaptive Passivity-Based Control for Induction Motors. Machines. 2024; 12(4):272. https://doi.org/10.3390/machines12040272
Chicago/Turabian StyleTravieso-Torres, Juan Carlos, Abdiel Josadac Ricaldi-Morales, and Norelys Aguila-Camacho. 2024. "Robust Combined Adaptive Passivity-Based Control for Induction Motors" Machines 12, no. 4: 272. https://doi.org/10.3390/machines12040272
APA StyleTravieso-Torres, J. C., Ricaldi-Morales, A. J., & Aguila-Camacho, N. (2024). Robust Combined Adaptive Passivity-Based Control for Induction Motors. Machines, 12(4), 272. https://doi.org/10.3390/machines12040272