Using the above Matlab/Simulink models, the following cases of faults are analyzed.
4.1. Short-Circuit in One IGBT of the RSC (F1)
The facts that could cause short-circuit in an IGBT are the following [
21]:
- (a)
a wrong voltage in IGBT gate, which may occurred because of driver circuit malfunction, auxiliary power supply failure, or rapid change of voltage (du/dt);
- (b)
an inherent failure, which may occurred due to an overvoltage/avalanche stress or temperature overshoot.
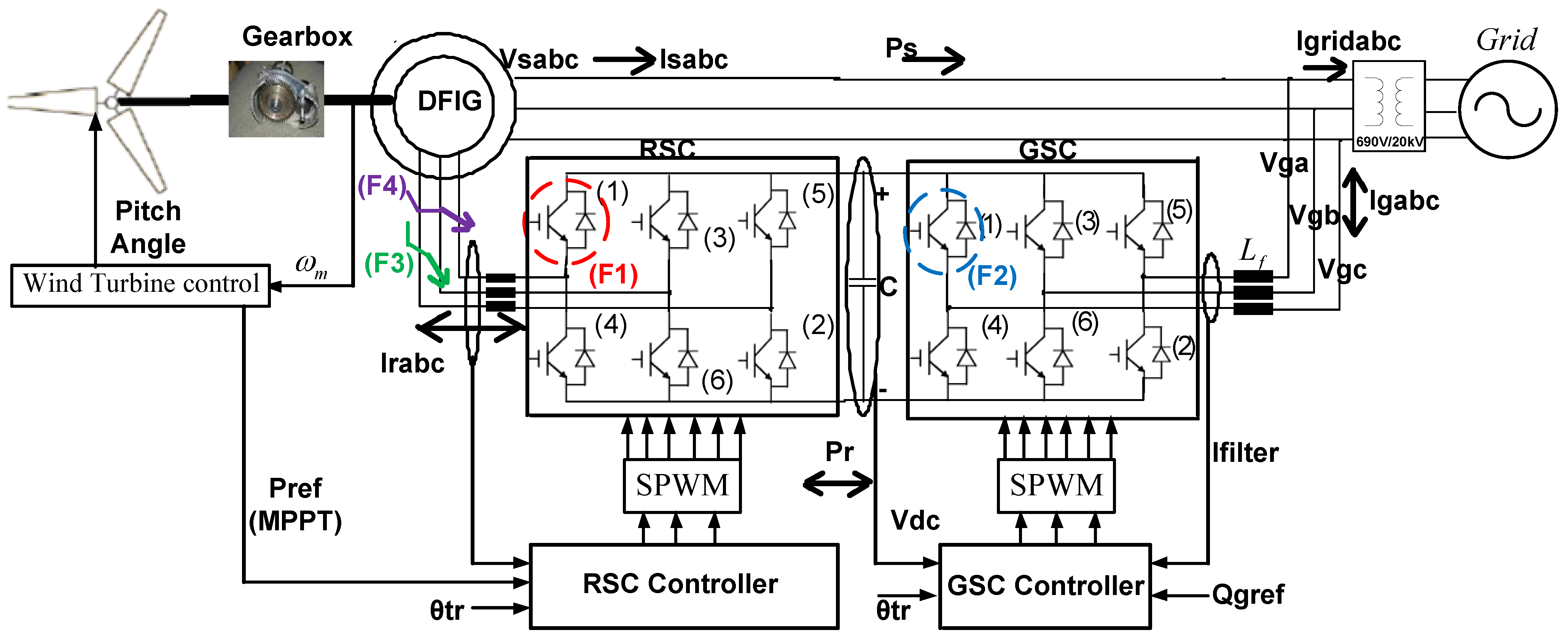
In this section the DFIG behavior under fault (F1)—
Figure 1—is studied. DFIG has been operated in supersynchronous mode (
nr = 1800 rpm >
ns = 1500 rpm—Synchronous speed) and at
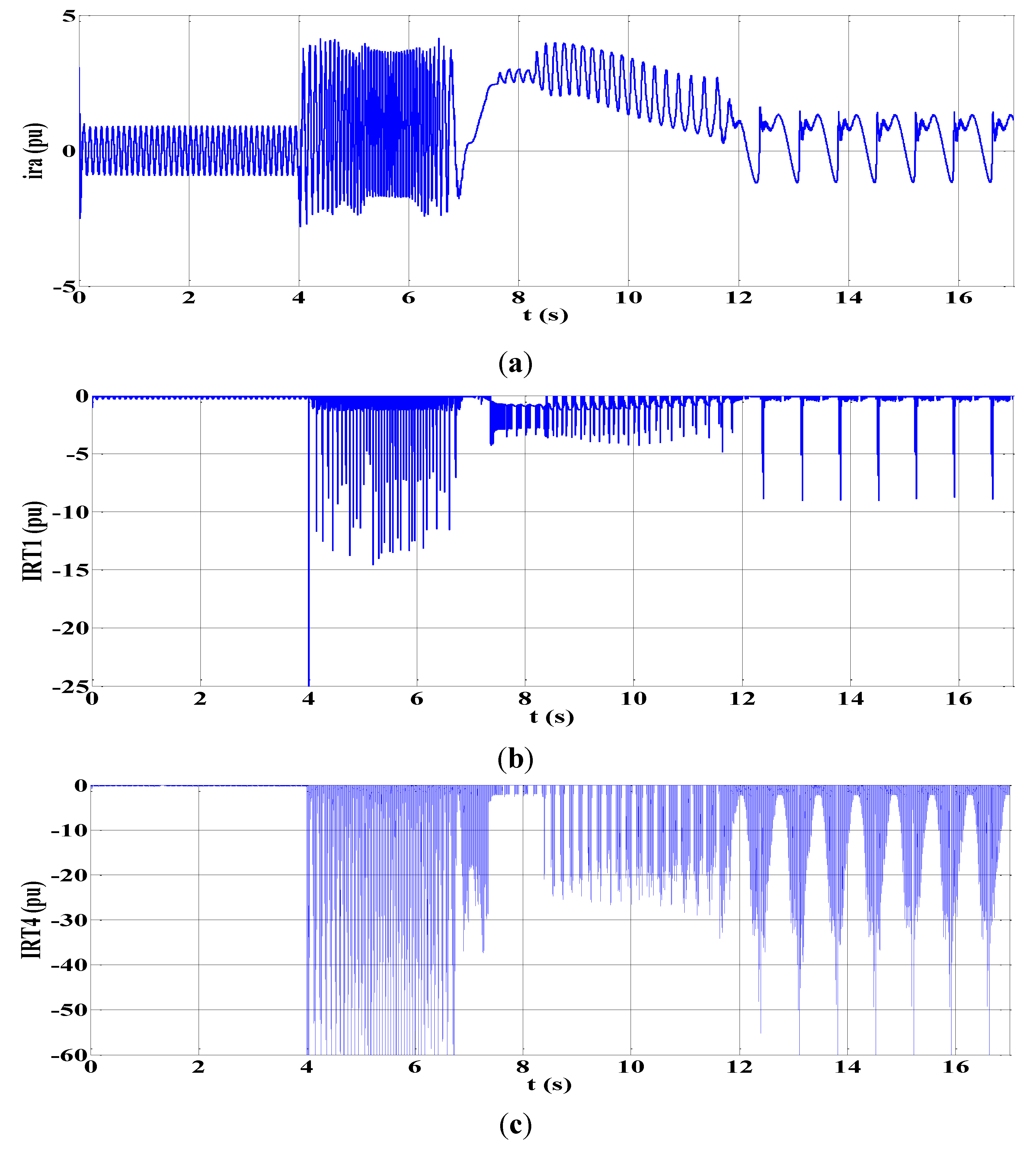
t = 4 s a short-circuit occurred in T1 (upper IGBT, phase a). During the simulation the switching operation of the other switches has not been changed (Rotor phase current i
ra, currents through IGBT (1)—IRT1—and IGBT (4)—IRT4, that have been affected by (F1), are shown in
Figure 6, where one can see that very high peak values come up. So, IGBTs breakdown is possible). The protection system has been considered not to be activated and the system has reached in a steady faulty state. According to the simulation results one can see in
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
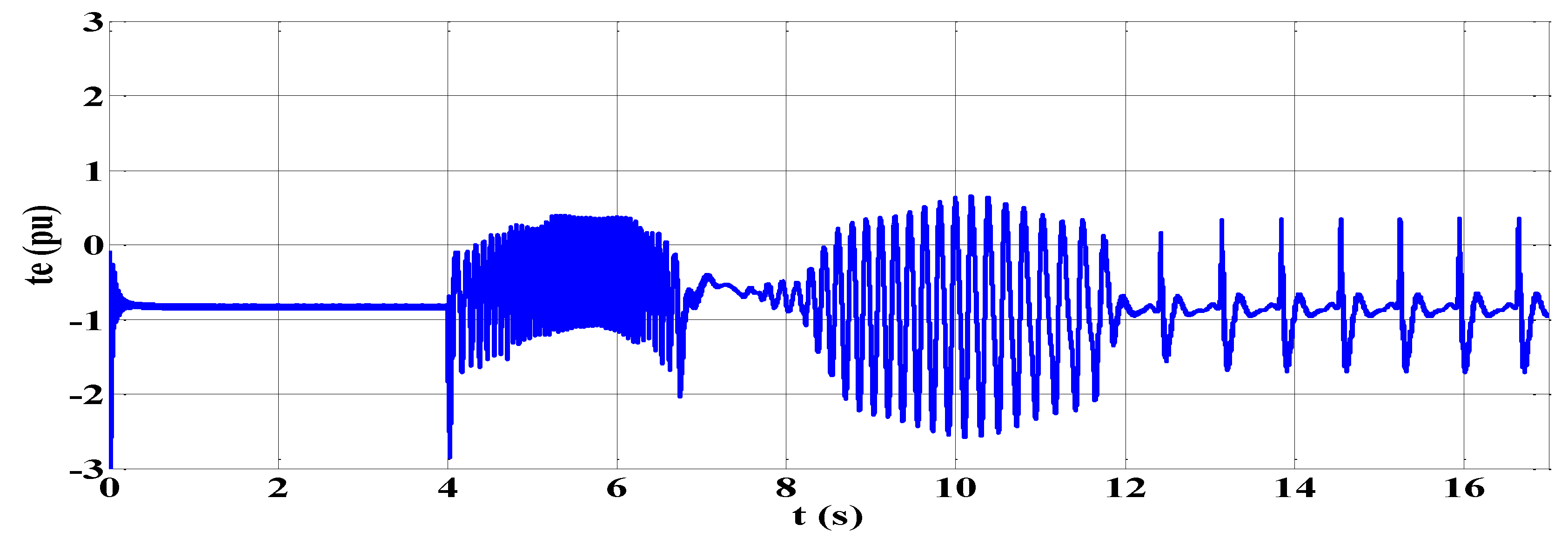
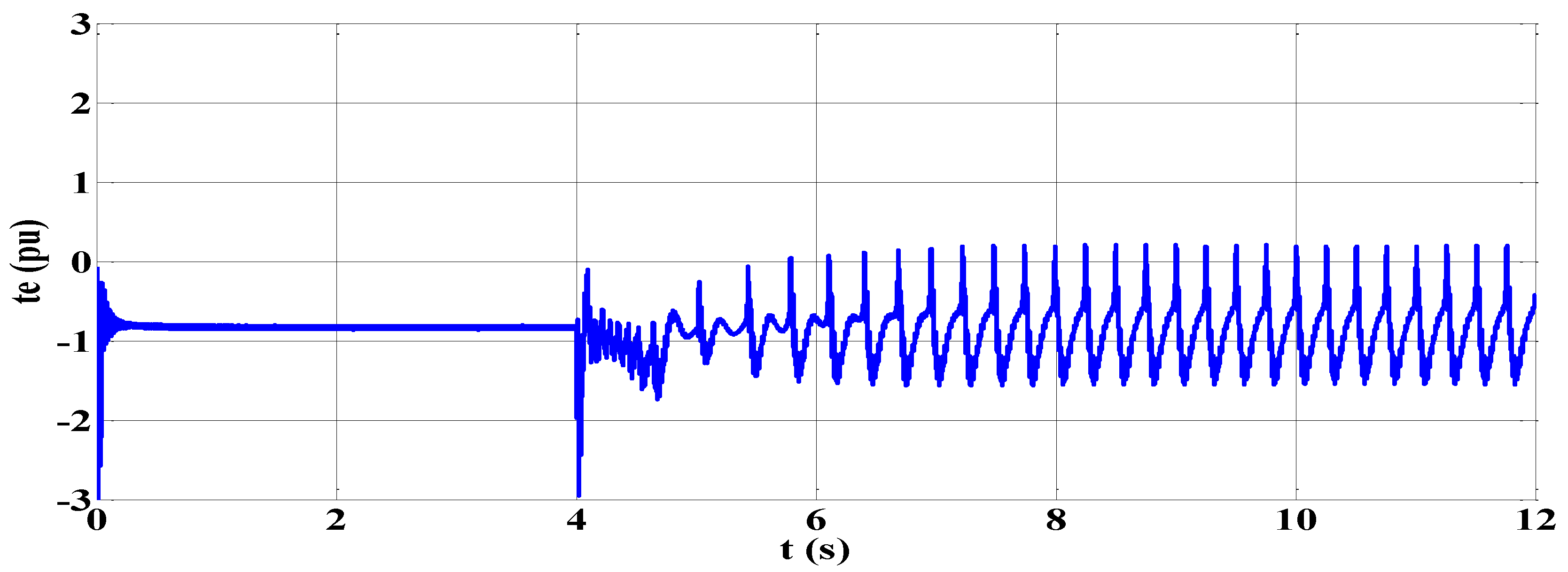
Figure 14 that (F1) has very severe consequences in the operational behavior of the whole system, because of the high current values and great torque oscillations. Initially, a very significant transient phenomenon occurs, which lasts for a long time (from
t = 4 s to
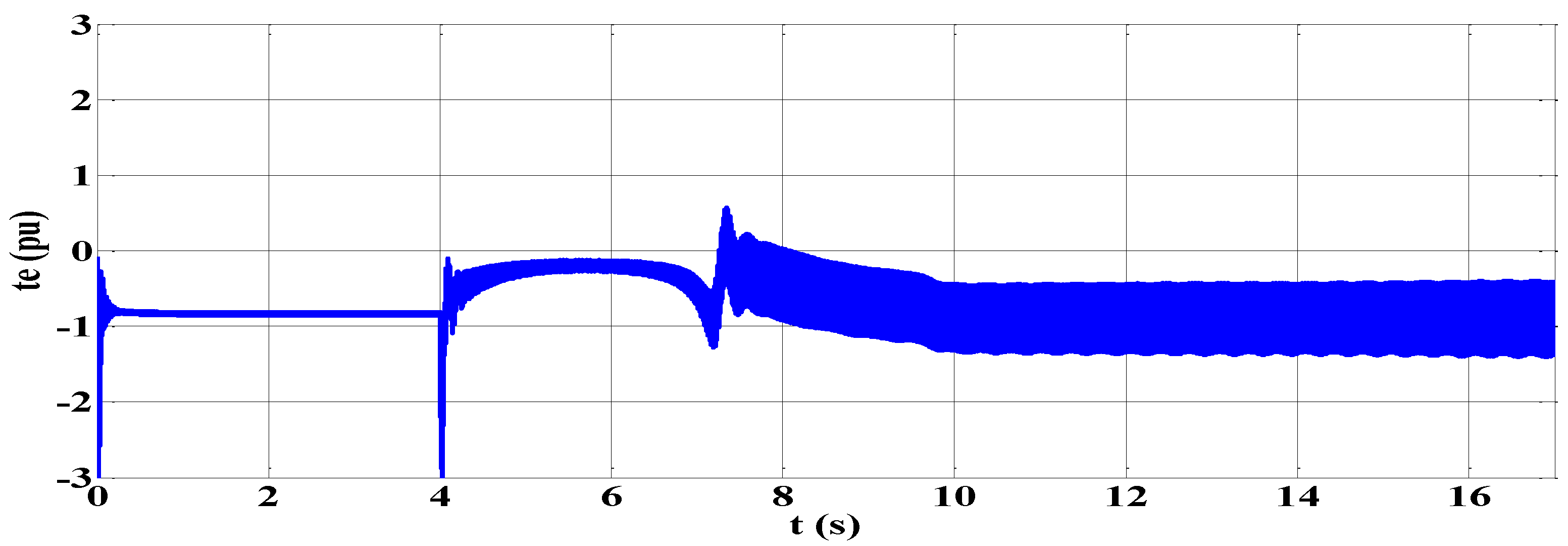
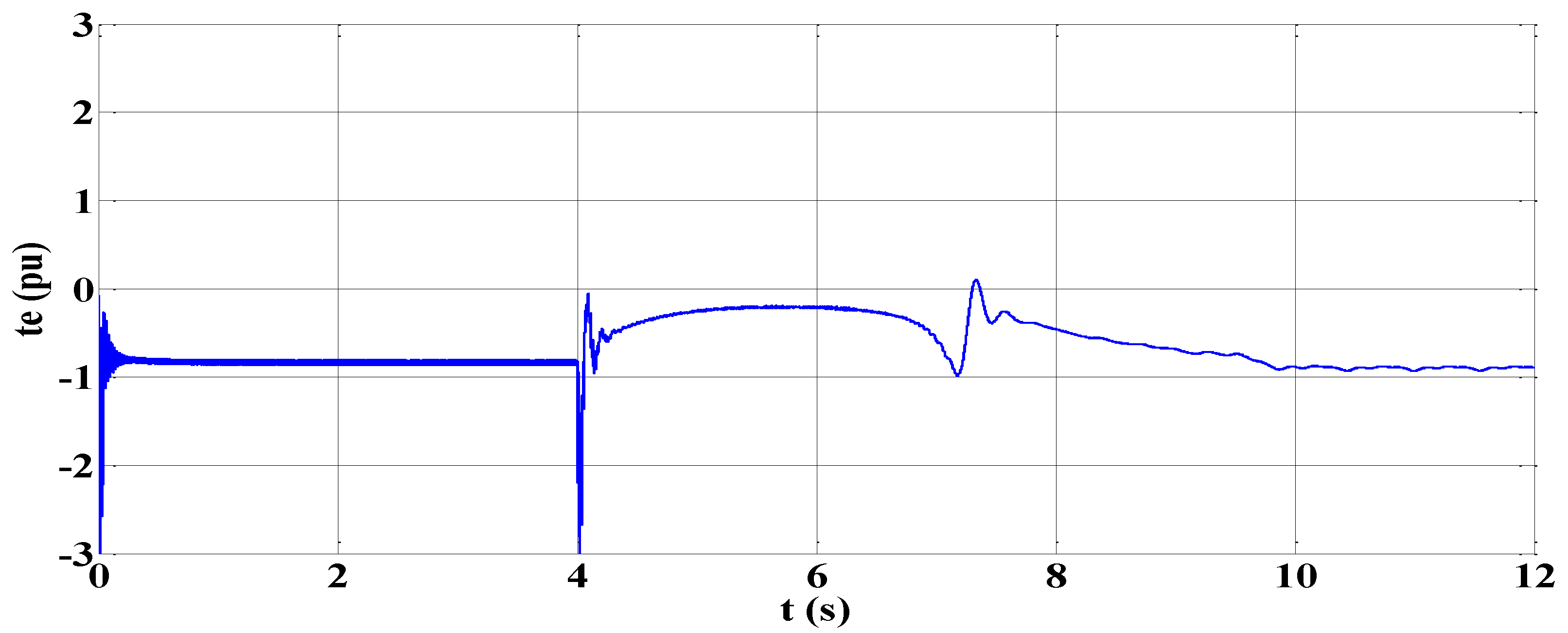
t = 12 s). A pulsating torque (t
e) has been caused (
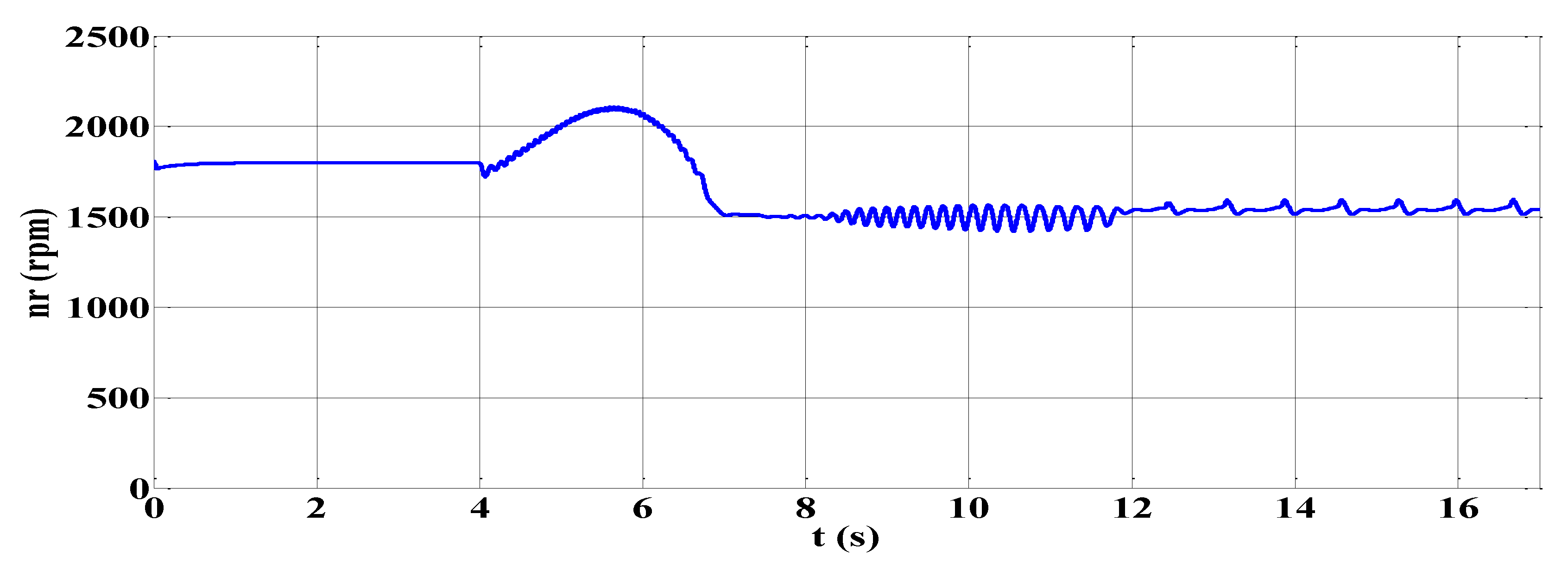
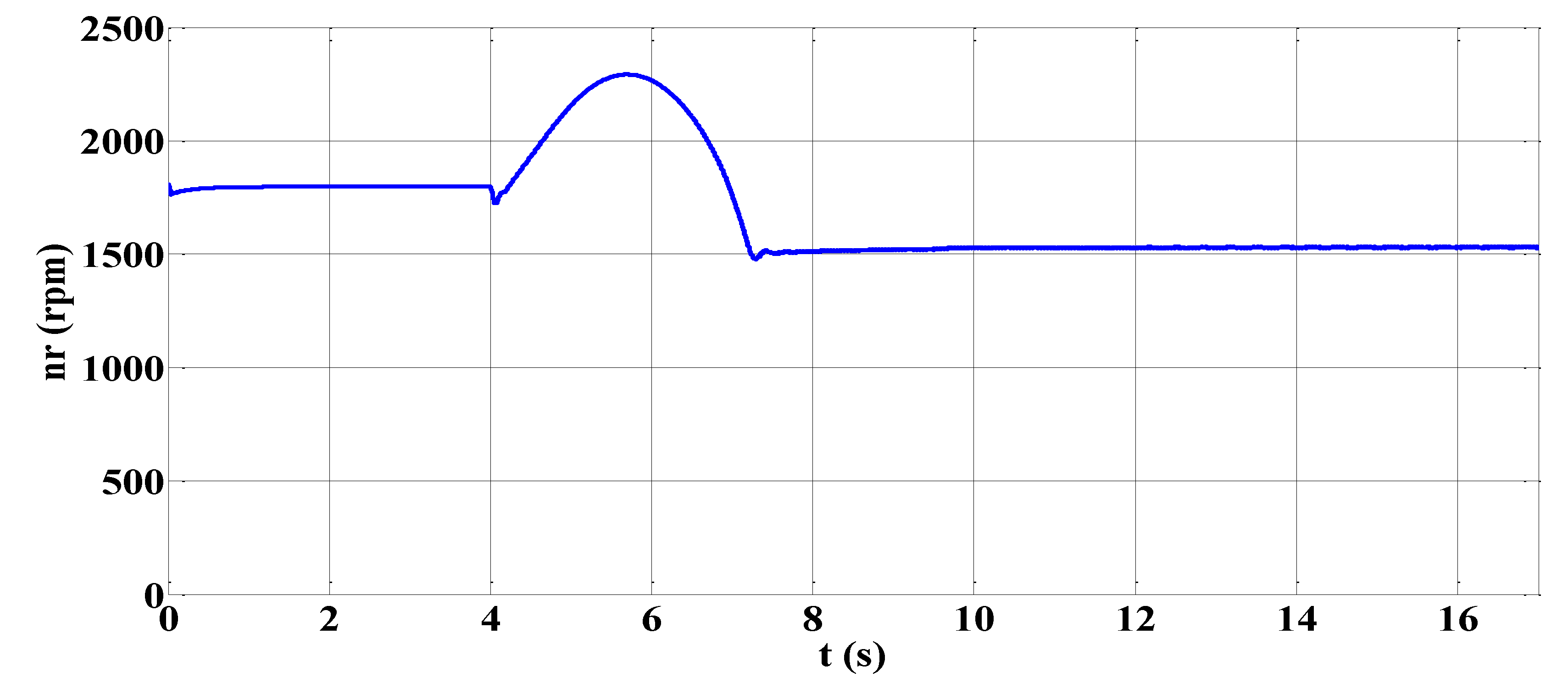
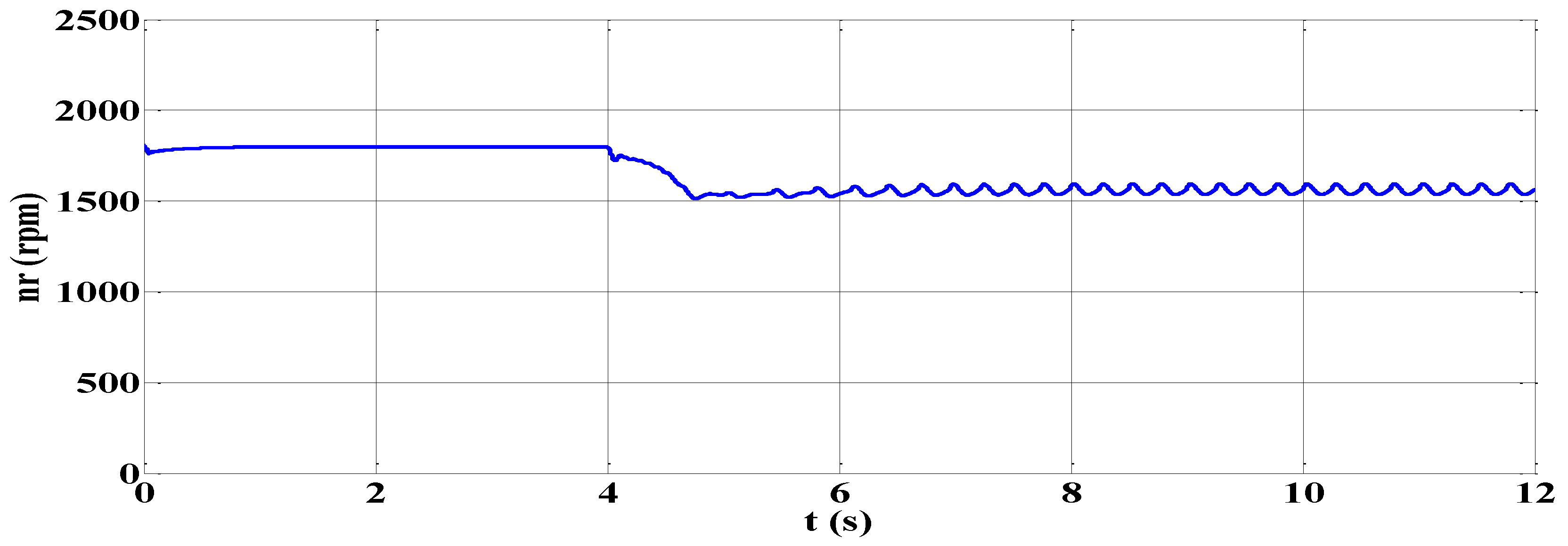
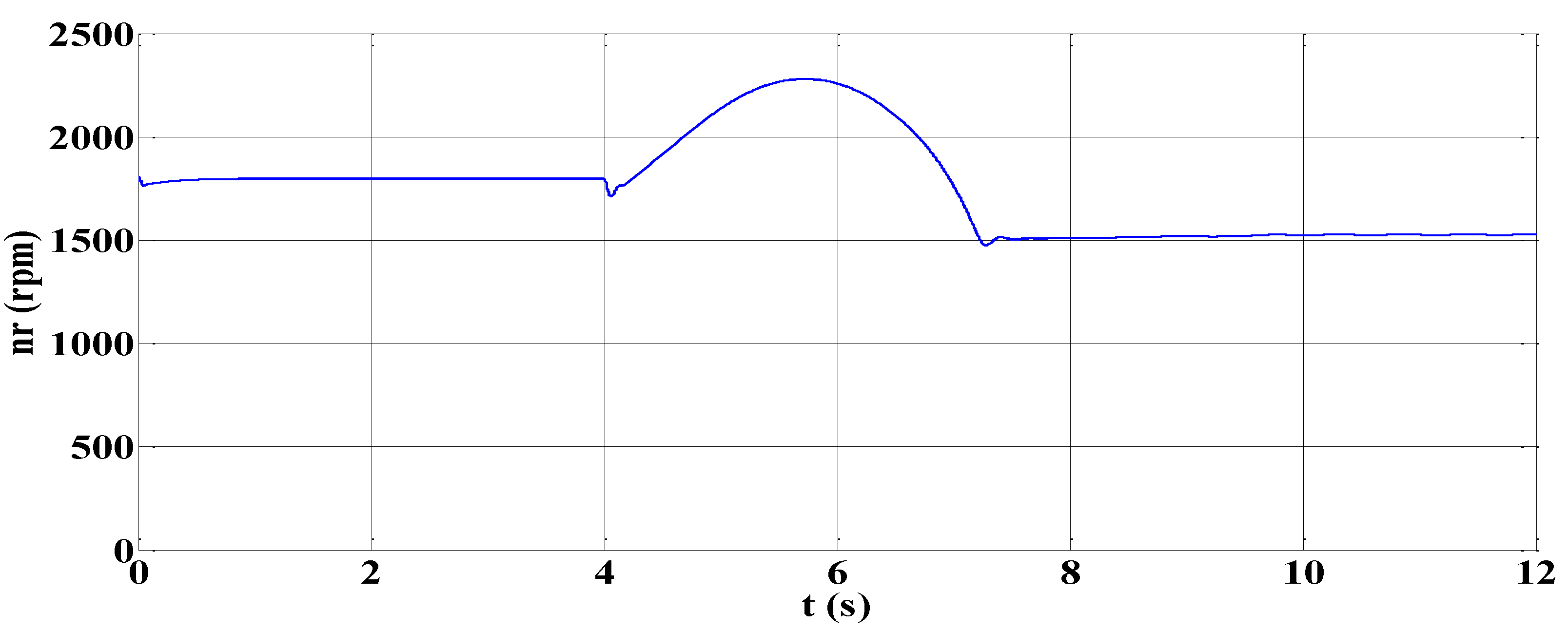
Figure 7) with great low frequency oscillations and has as a result severe vibration on the mechanical part of the system (turbine-generator-gearbox) and maybe total breakdown of the system. Rotor speed n
r (rpm) (
Figure 8) increases to 2100 rpm (pitch control could be possibly activated, but due to the fact that it consists of mechanical parts, it has high time constant). Then, it oscillates about synchronous speed and finally decreases at 1555 rpm (with oscillations ±40 rpm). In addition, pulsations appear in stator active power, which is no more regulated and this could cause problems to the grid.
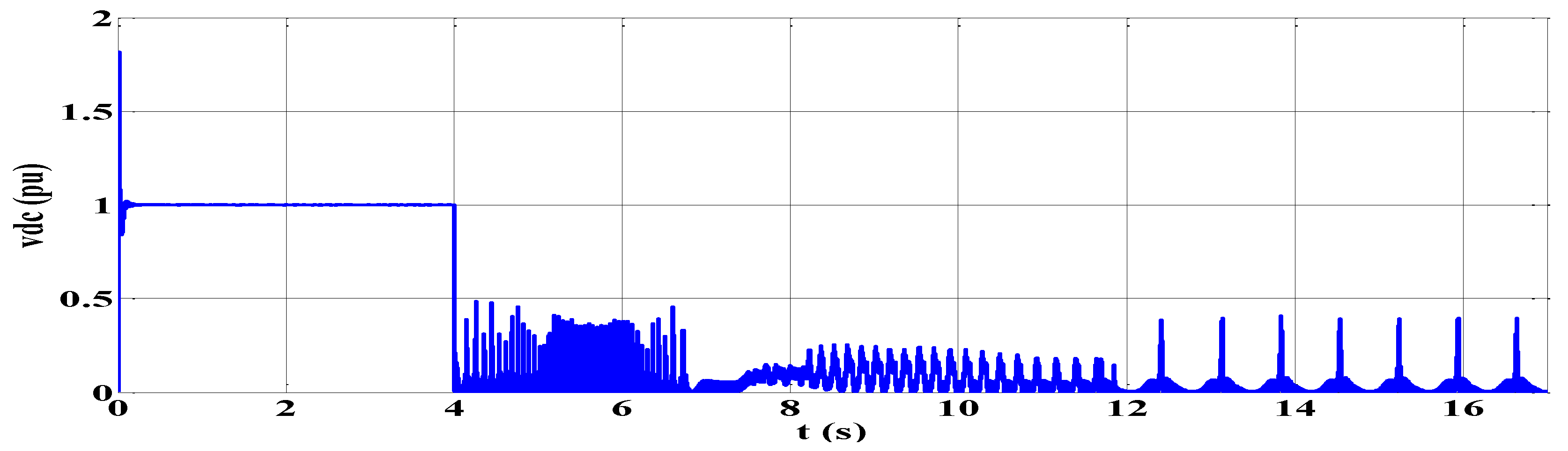
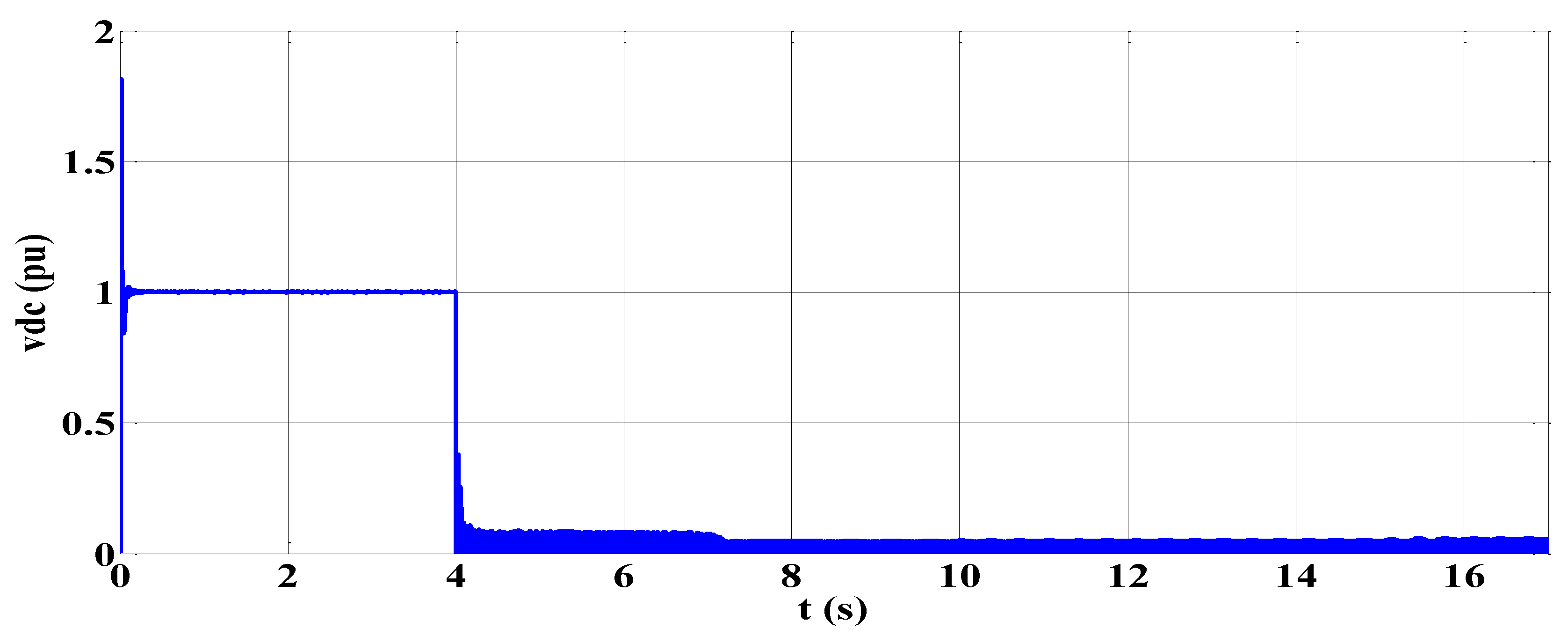
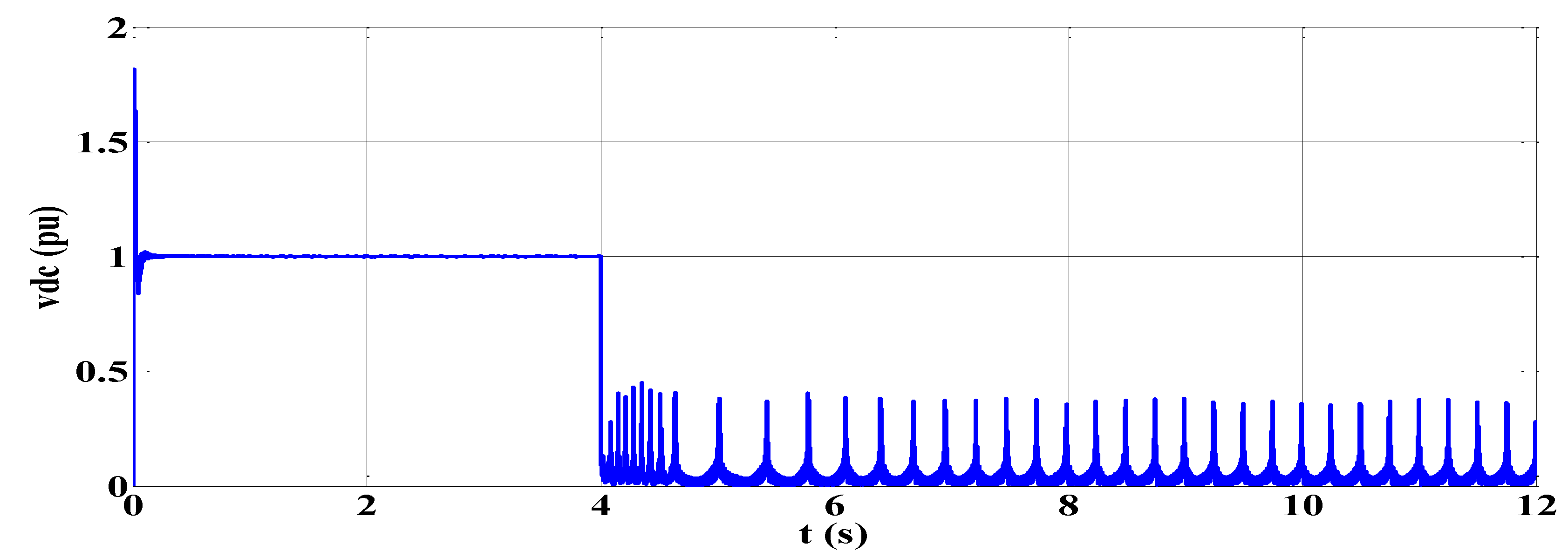
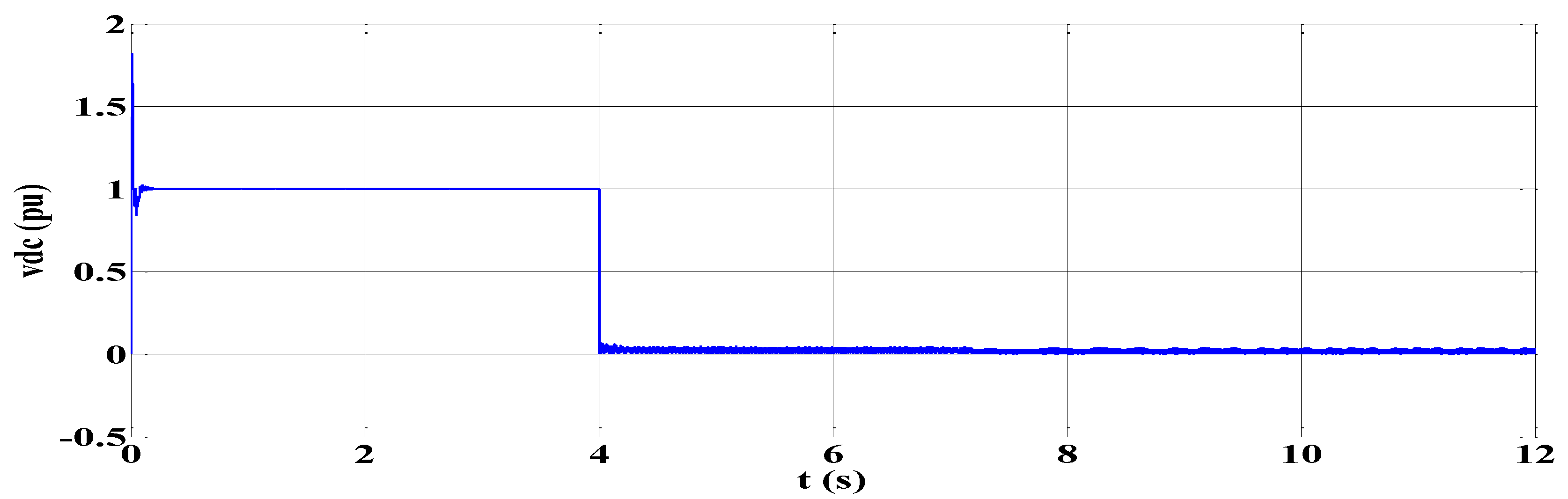
Figure 9 shows that (F1) has a high effect on the dc link voltage as it decreases significantly. As depicted in
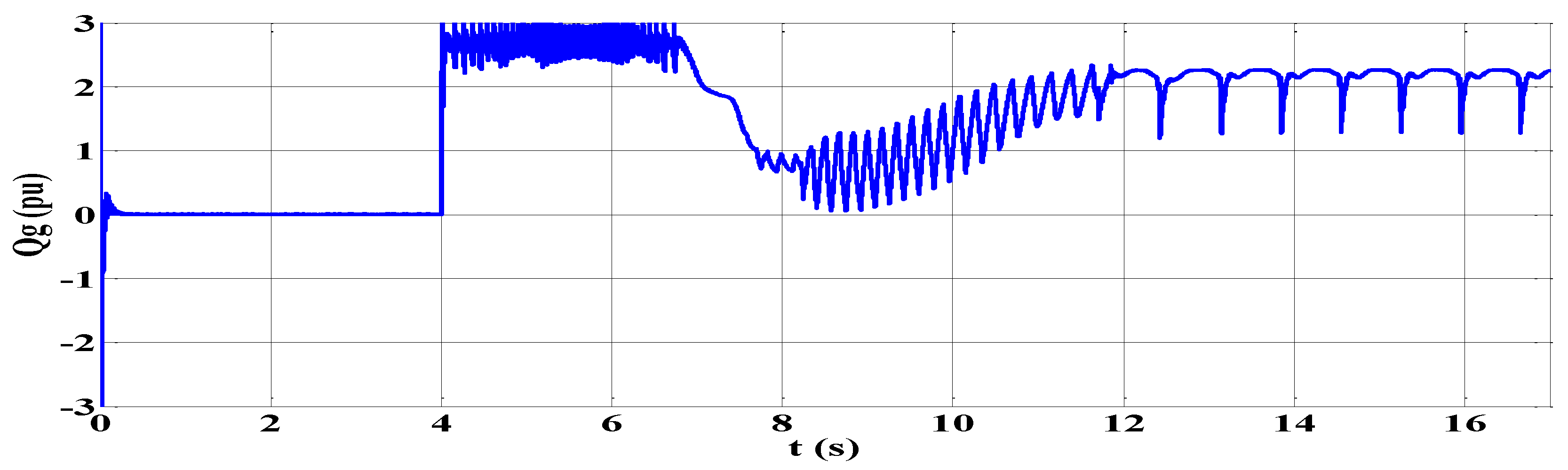
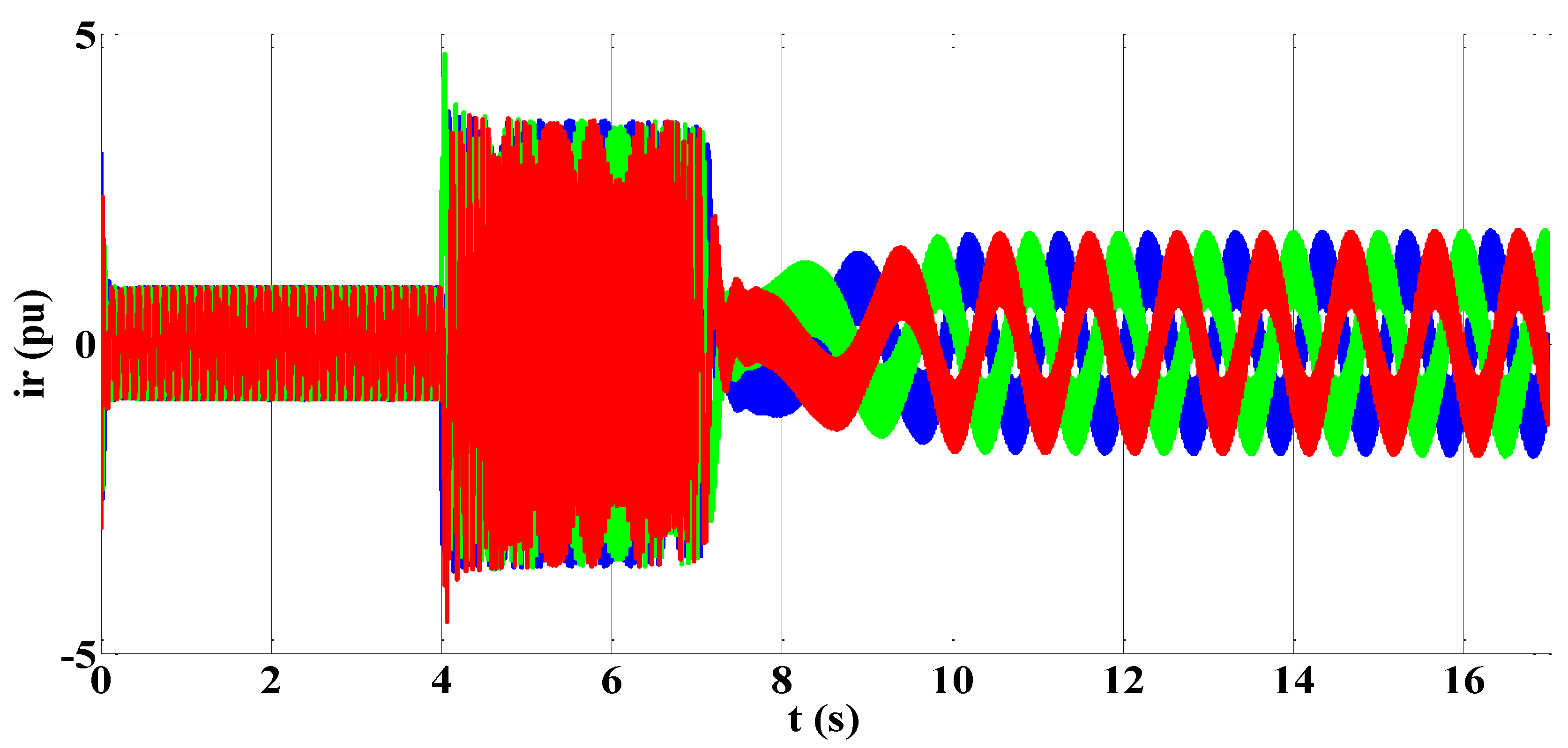
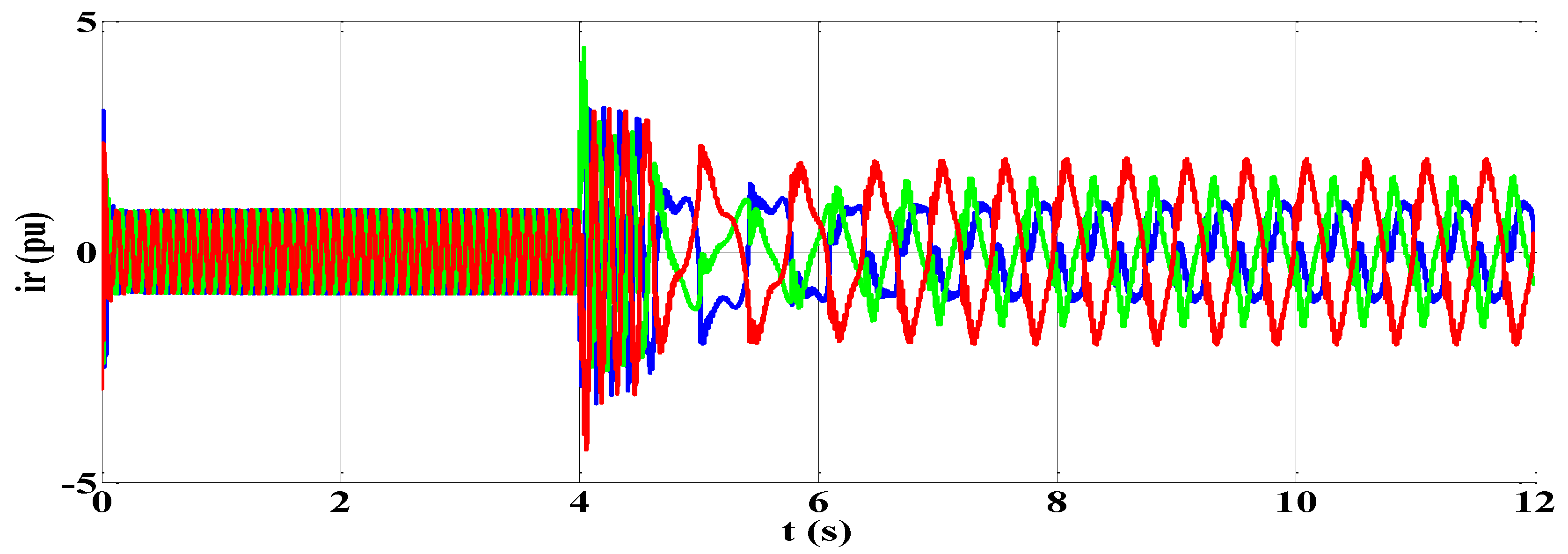
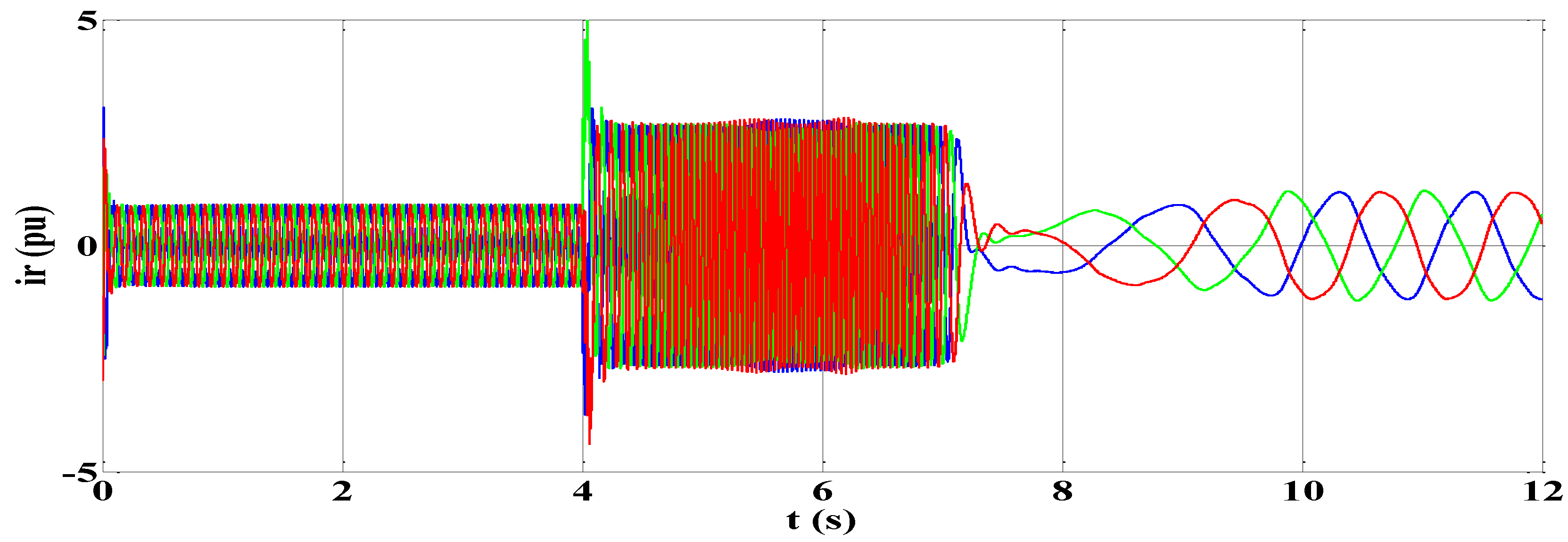
Figure 10, DFIG draws 3 pu reactive power from the grid for a time period of 2.5 s and finally oscillates about 1.5 pu. Both rotor (
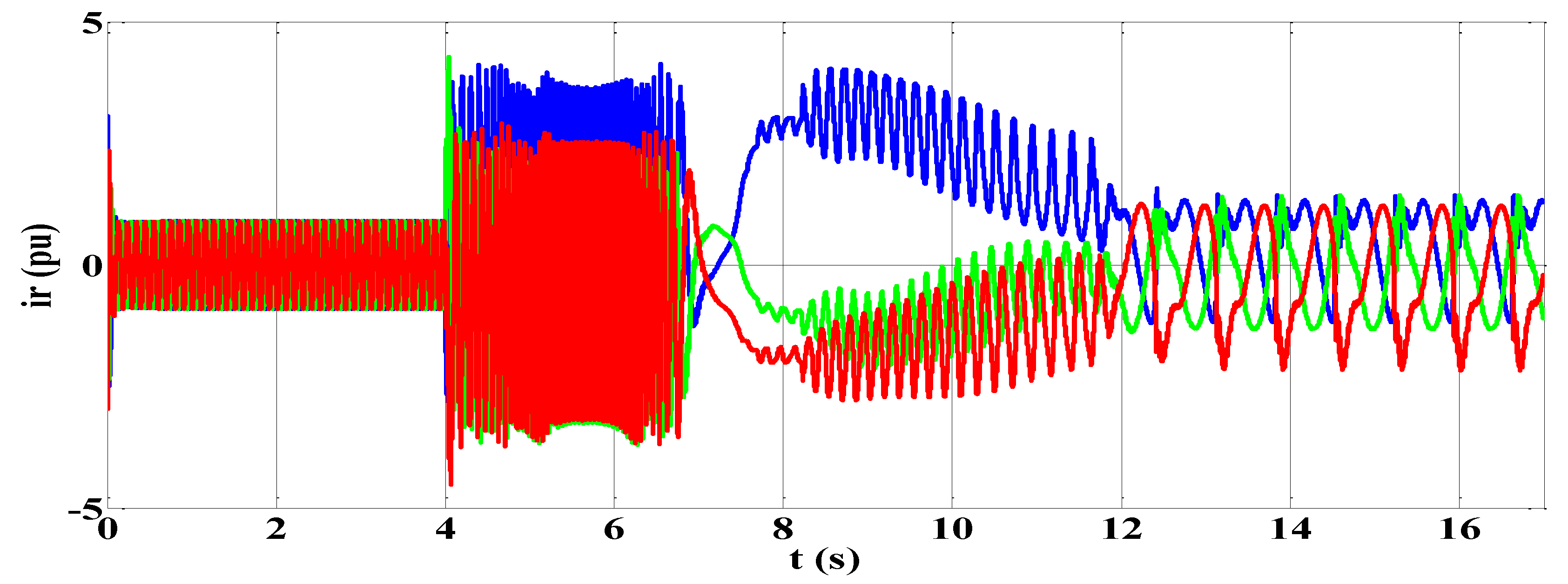
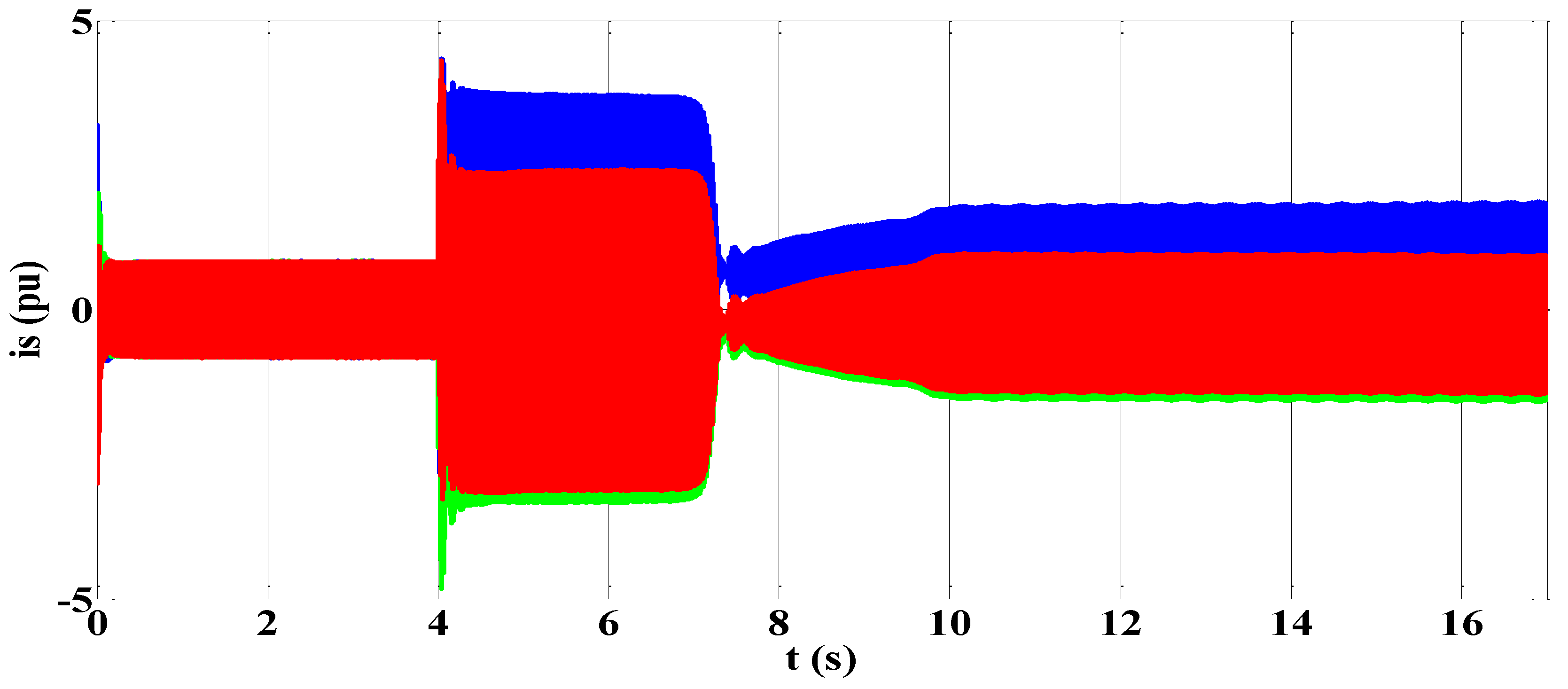
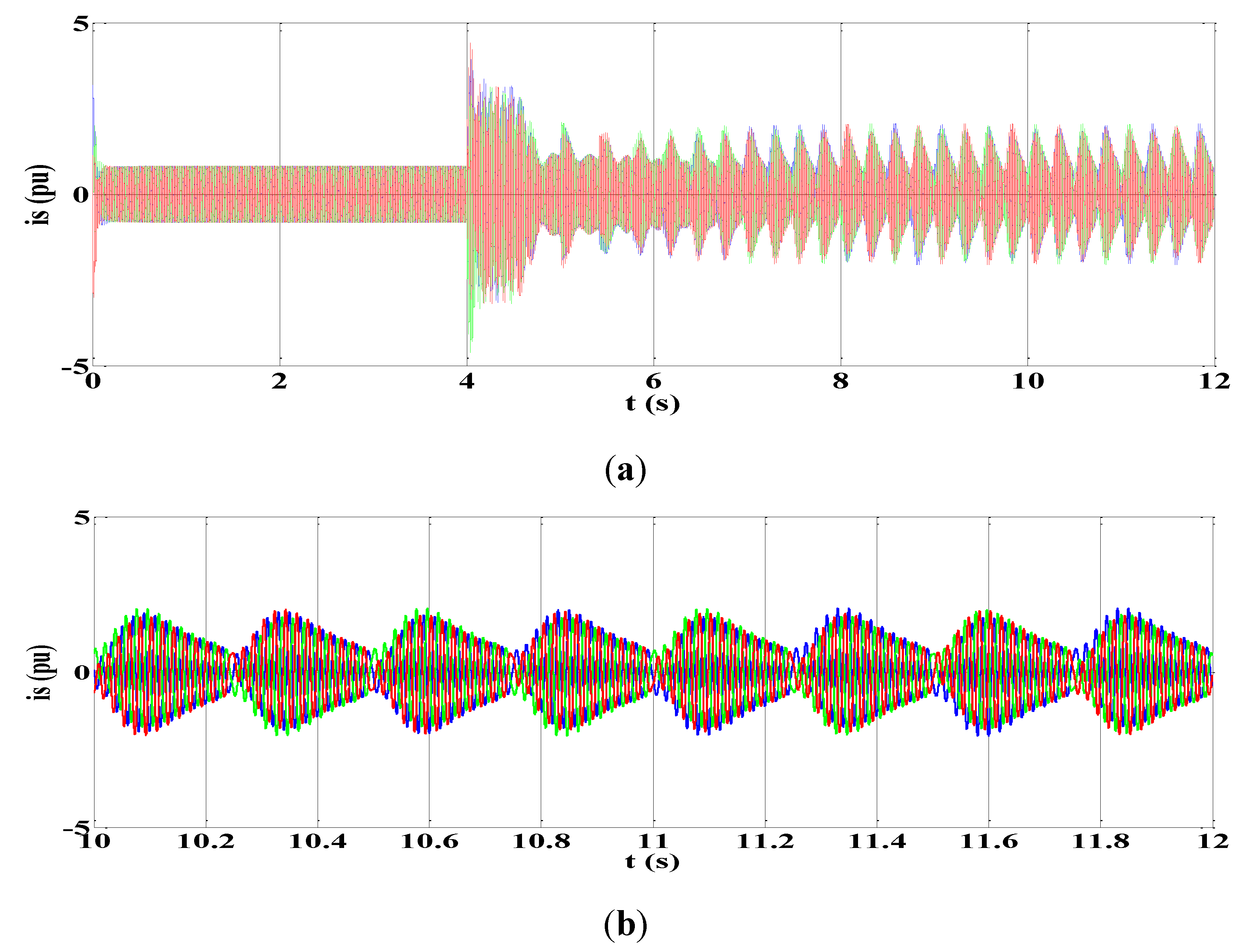
Figure 11) and stator (
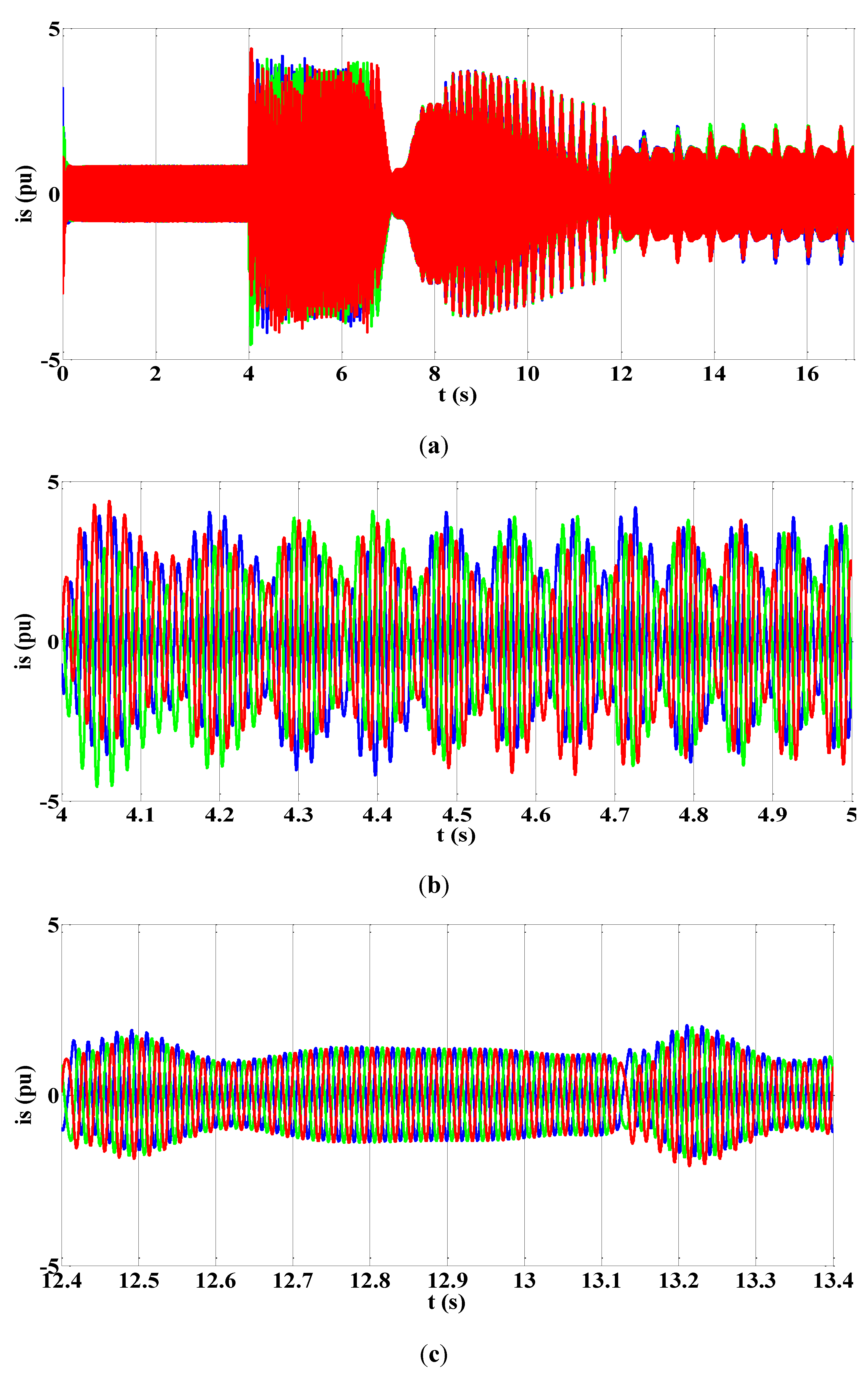
Figure 12) currents are affected greatly because of (F1). More specifically, a dc component and very high peak values appear in rotor currents—Approximately four times the nominal value during the transient condition and 1.3 times after system equilibration, while stator currents get high values. The dc component worsens the current stress of the healthy converter switches (especially in supersynchronous mode). However, rotor windings and the converter switches could be damaged during the transient state. Finally, in
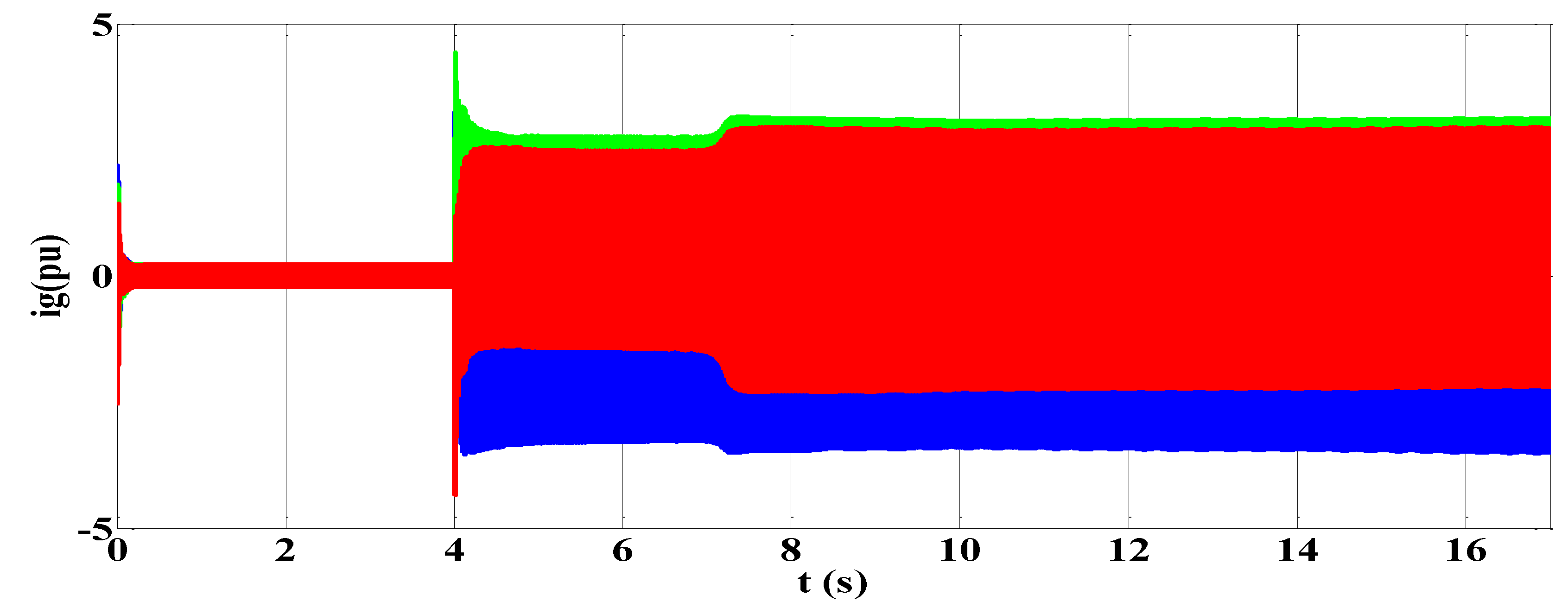
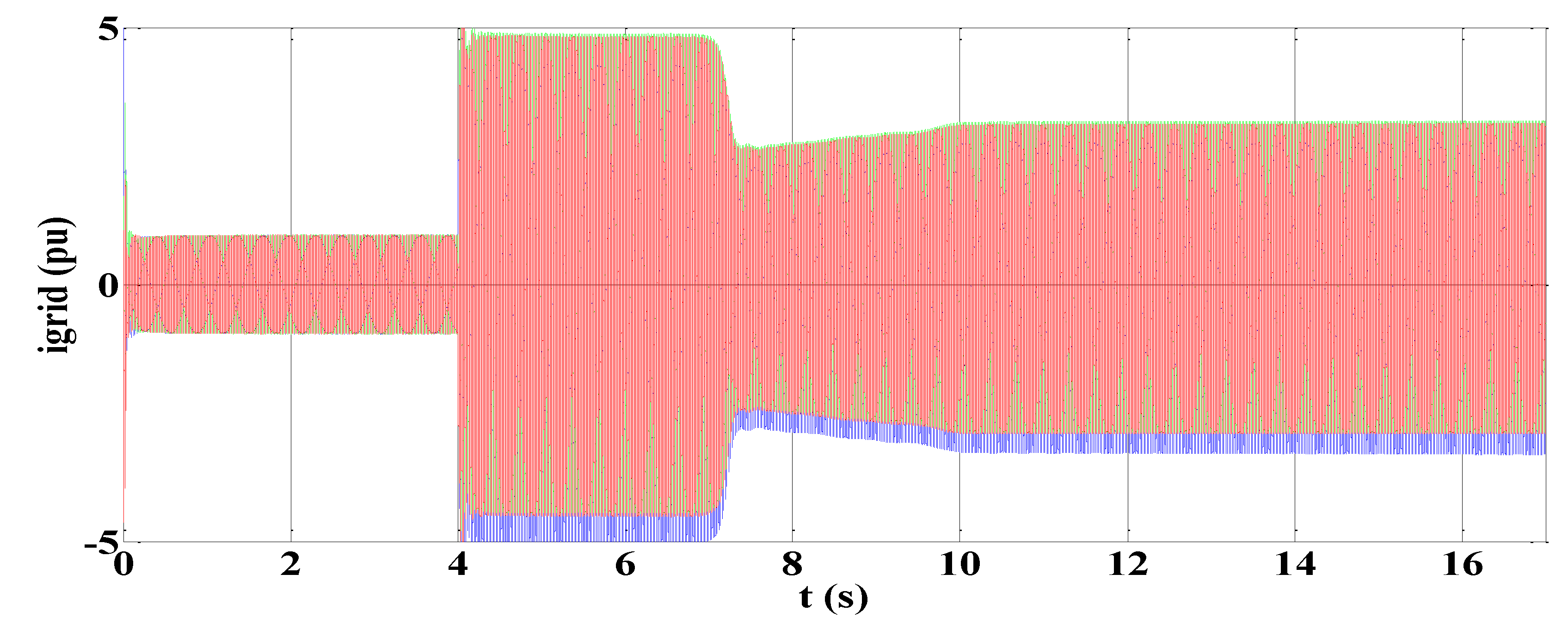
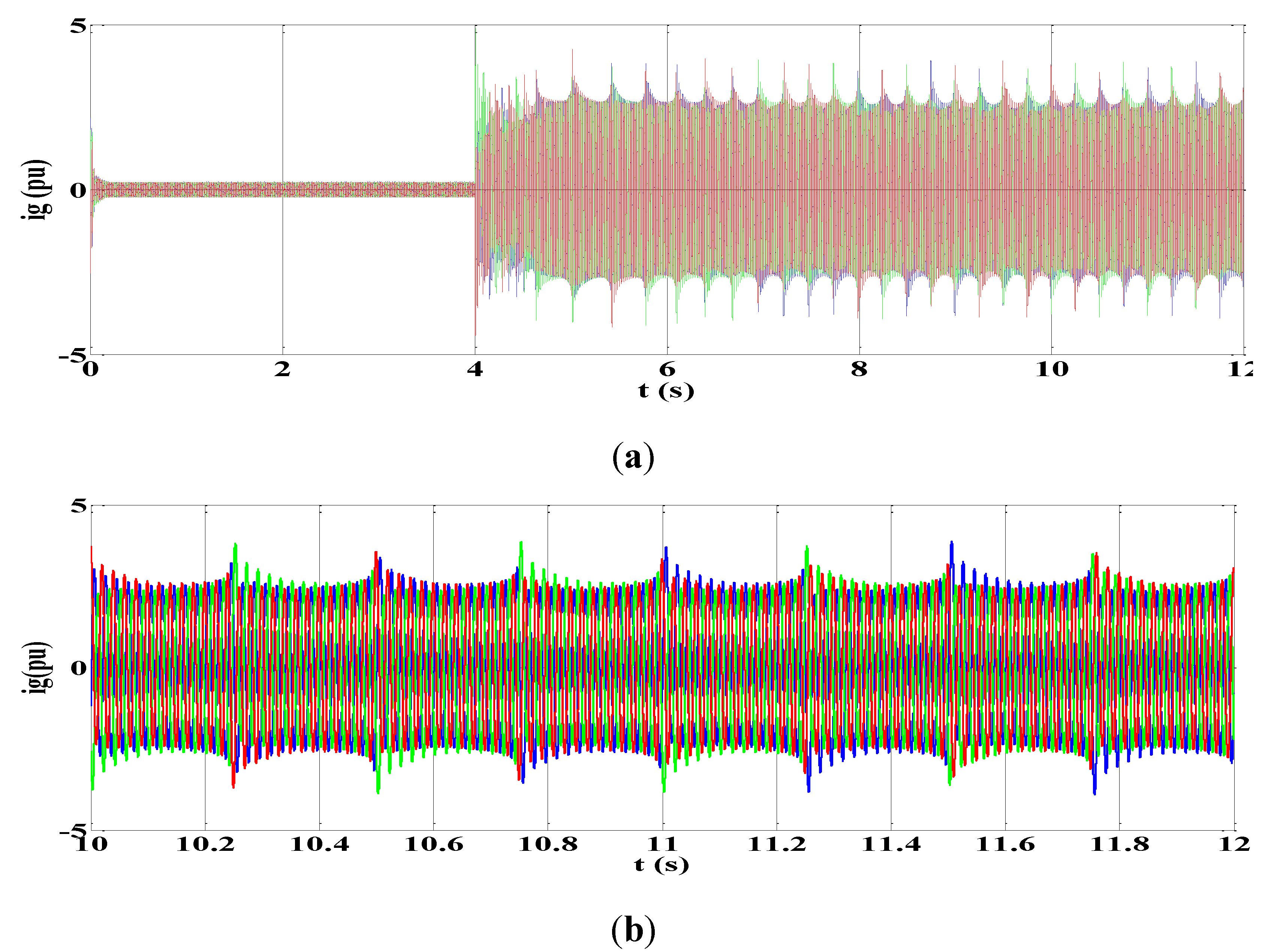
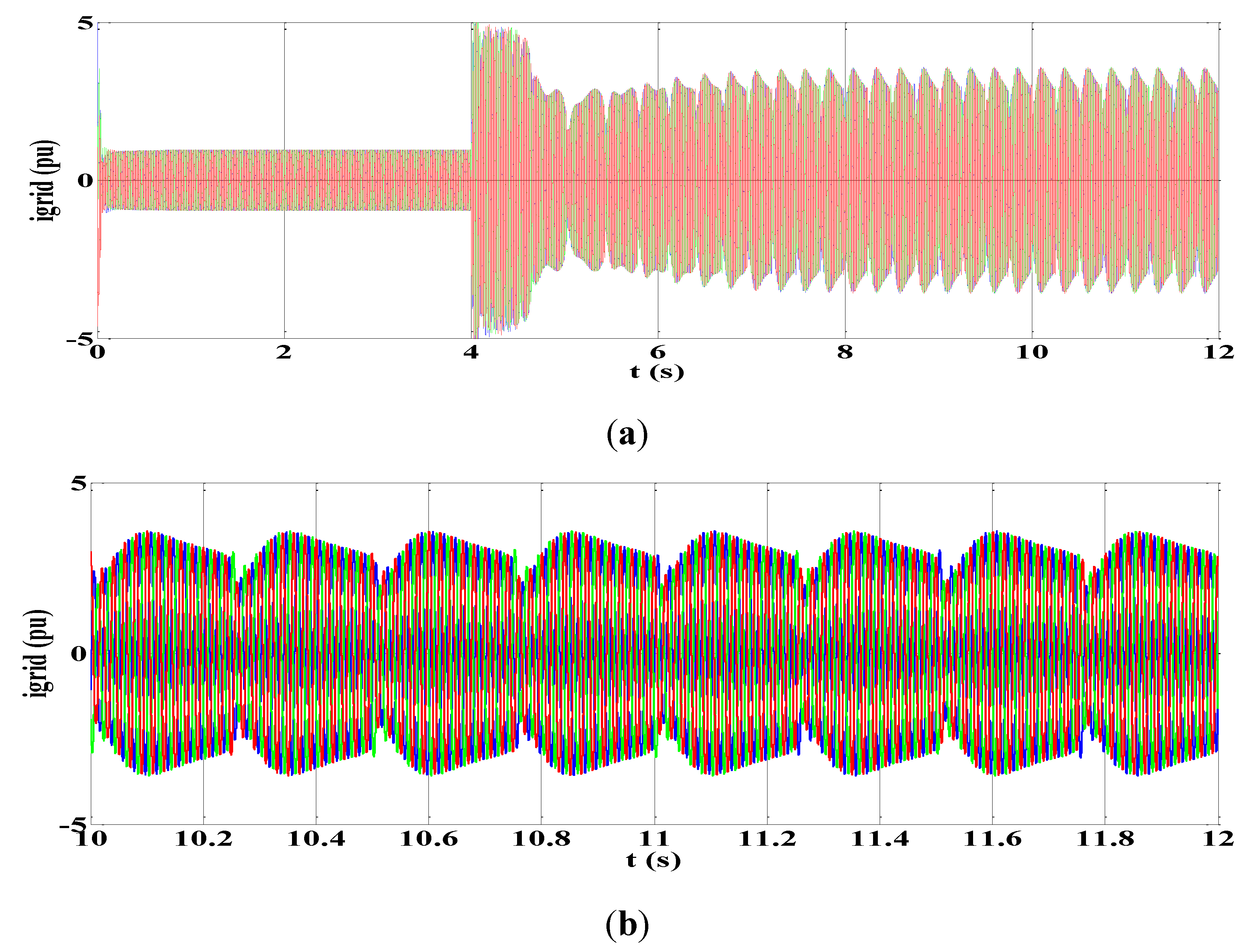
Figure 13 and
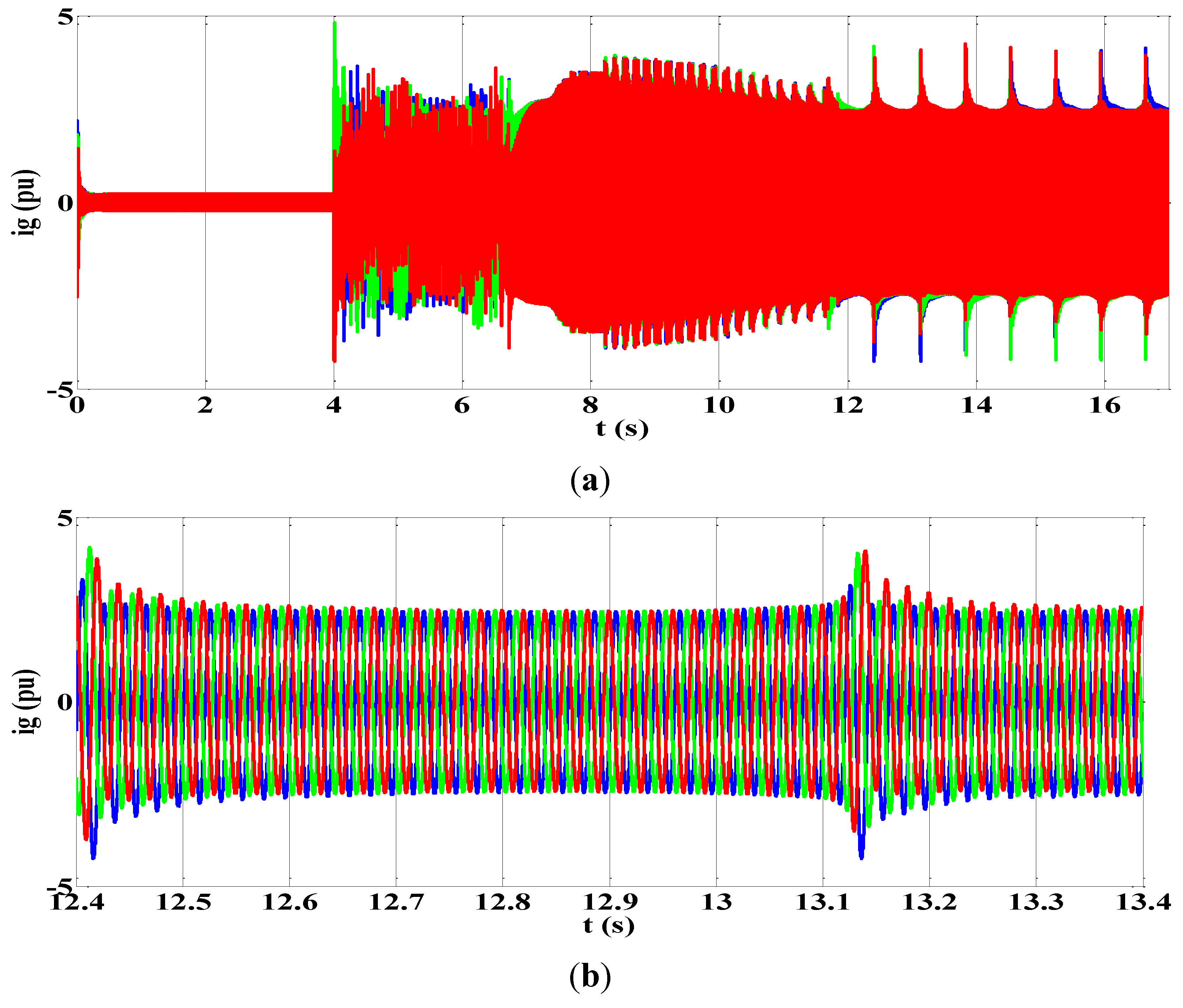
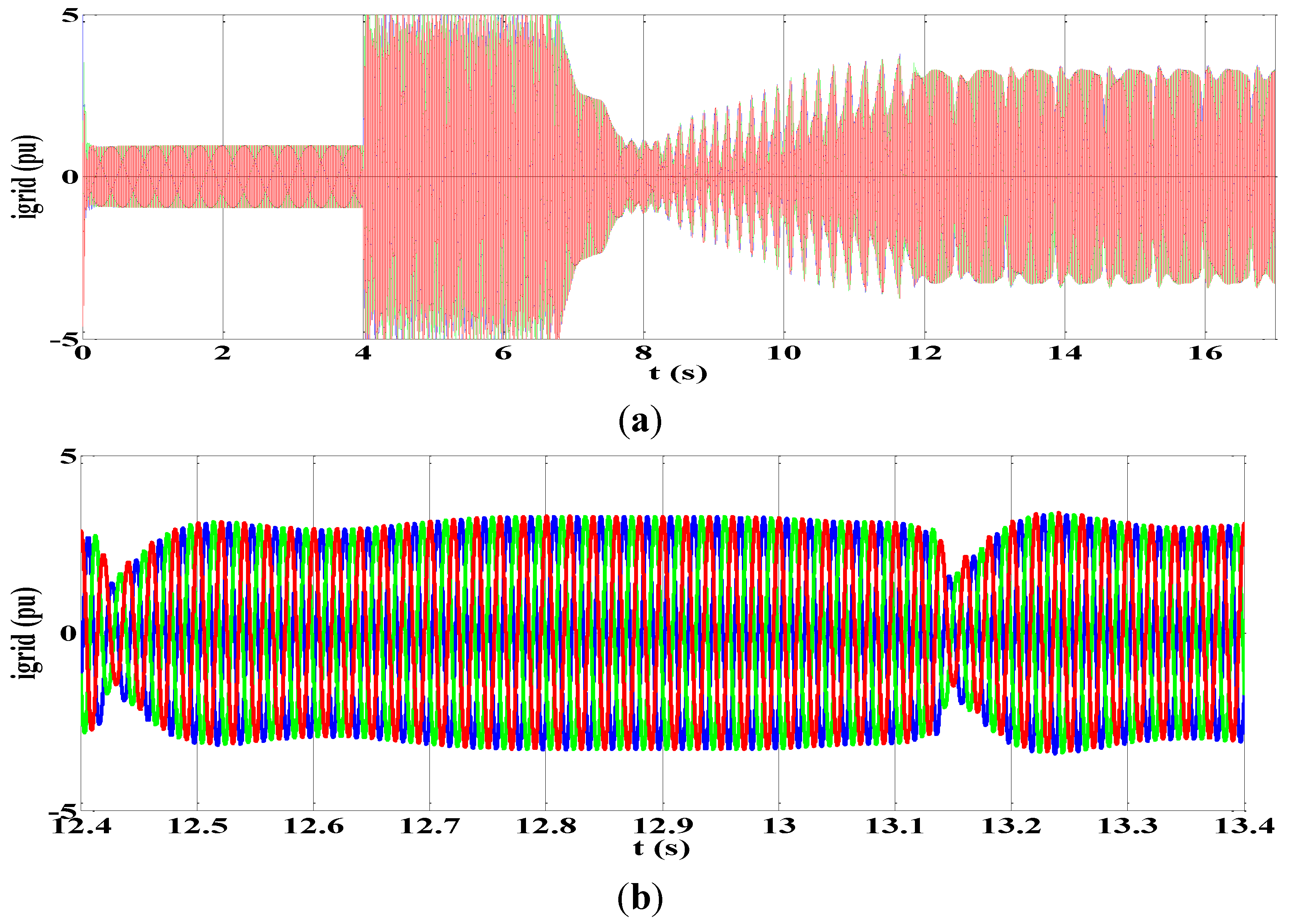
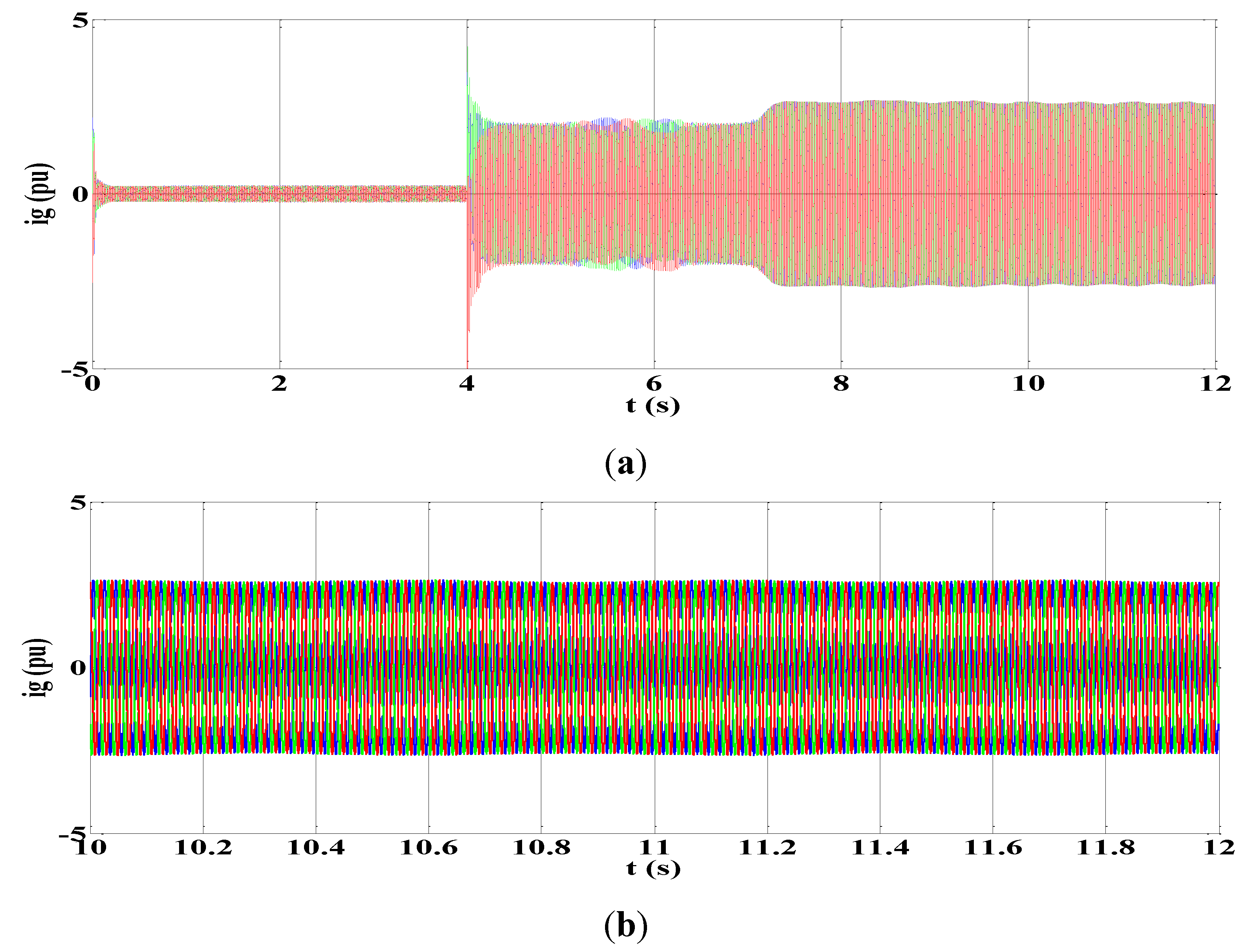
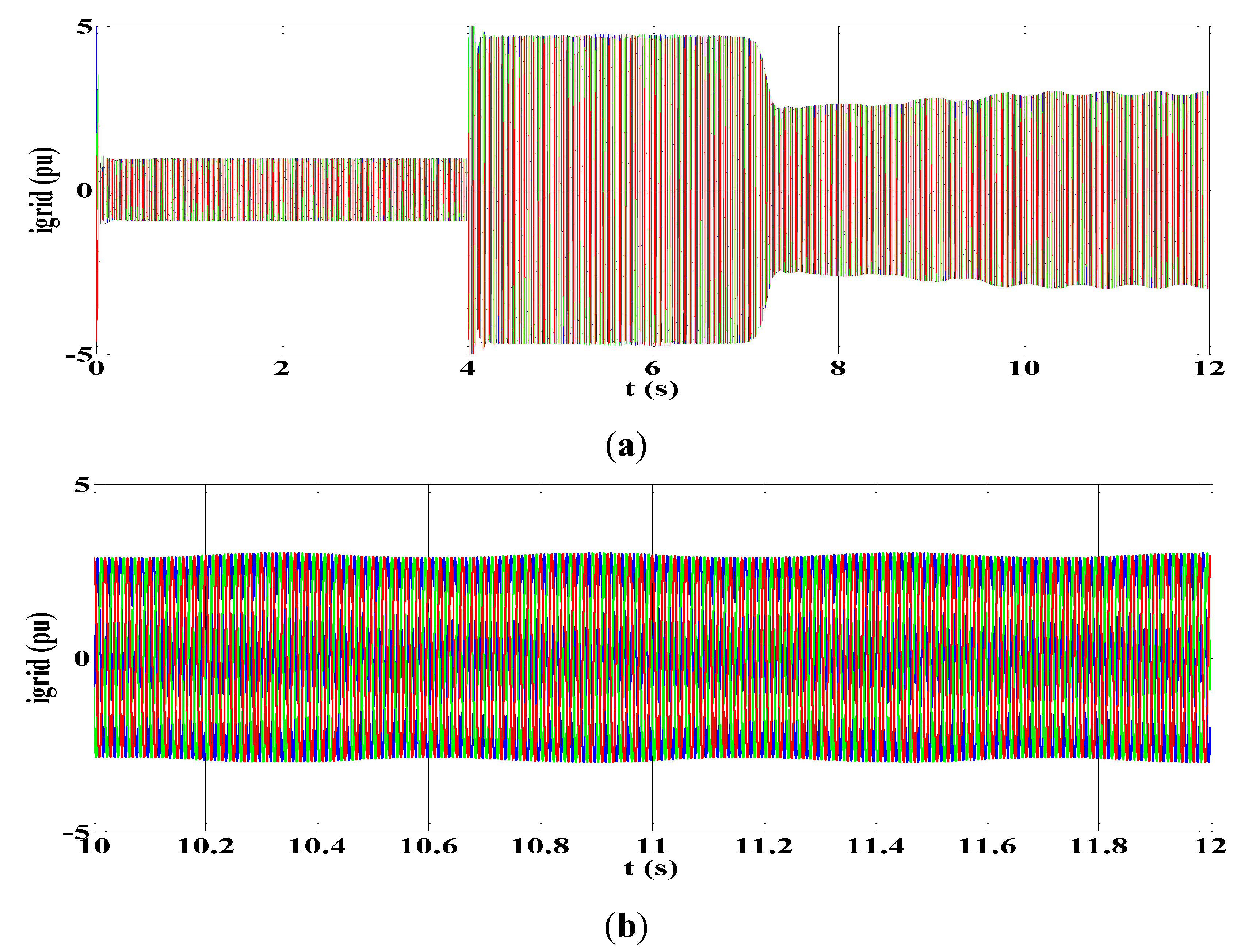
Figure 14 one can see that (F1) causes high peak values (3.5–4 times the nominal value) and oscillations in both GSC line currents I
gabc and grid phase currents I
gridabc that will result grid disturbances.
Figure 6.
Waveforms of the characteristic variables of the RSC: (a) Rotor phase current ira, (b) Current through IGBT (1), (c) Current through Insulated Gate Bipolar transistor (IGBT) (4) (short-circuit happens at t = 4 s for all waveforms).
Figure 6.
Waveforms of the characteristic variables of the RSC: (a) Rotor phase current ira, (b) Current through IGBT (1), (c) Current through Insulated Gate Bipolar transistor (IGBT) (4) (short-circuit happens at t = 4 s for all waveforms).
Figure 7.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 7.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 8.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 8.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 9.
DC link voltage (short-circuit happens at t = 4 s).
Figure 9.
DC link voltage (short-circuit happens at t = 4 s).
Figure 10.
Doubly-Fed Industion Generator (DFIG) reactive power (short-circuit happens at t = 4 s).
Figure 10.
Doubly-Fed Industion Generator (DFIG) reactive power (short-circuit happens at t = 4 s).
Figure 11.
Rotor currents (short-circuit happens at t = 4 s).
Figure 11.
Rotor currents (short-circuit happens at t = 4 s).
Figure 12.
(a) Stator currents (short-circuit happens at t = 4 s), (b) zoom of (a) immediately after fault; (c) zoom of (a) after system equilibrates.
Figure 12.
(a) Stator currents (short-circuit happens at t = 4 s), (b) zoom of (a) immediately after fault; (c) zoom of (a) after system equilibrates.
Figure 13.
(a) Grid Side Converter (GSC) phase currents Igabc (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 13.
(a) Grid Side Converter (GSC) phase currents Igabc (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 14.
(a) Grid phase currents Igridabc (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 14.
(a) Grid phase currents Igridabc (short-circuit happens at t = 4 s), (b) zoom of (a).
From everything mentioned before, one can easily conclude that the consequences of a short-circuit fault in one IGBT of RSC will be catastrophic for the system, so an adequate control and a protection system must be adopted for fault clearance, system protection during fault and possible DFIG disconnection. Using current measurements (e.g., rotor phase currents that are measured in any way) and when a threshold has been exceeded a command to interrupt the IGBTs pulsating must be given.
4.2. Short-Circuit in One IGBT of the GSC (F2)
In this case the DFIG reaction under (F2)—
Figure 1—Is investigated. DFIG has been operated in supersynchronous mode (
nr = 1800 rpm >
ns = 1500 rpm—Synchronous speed) and at
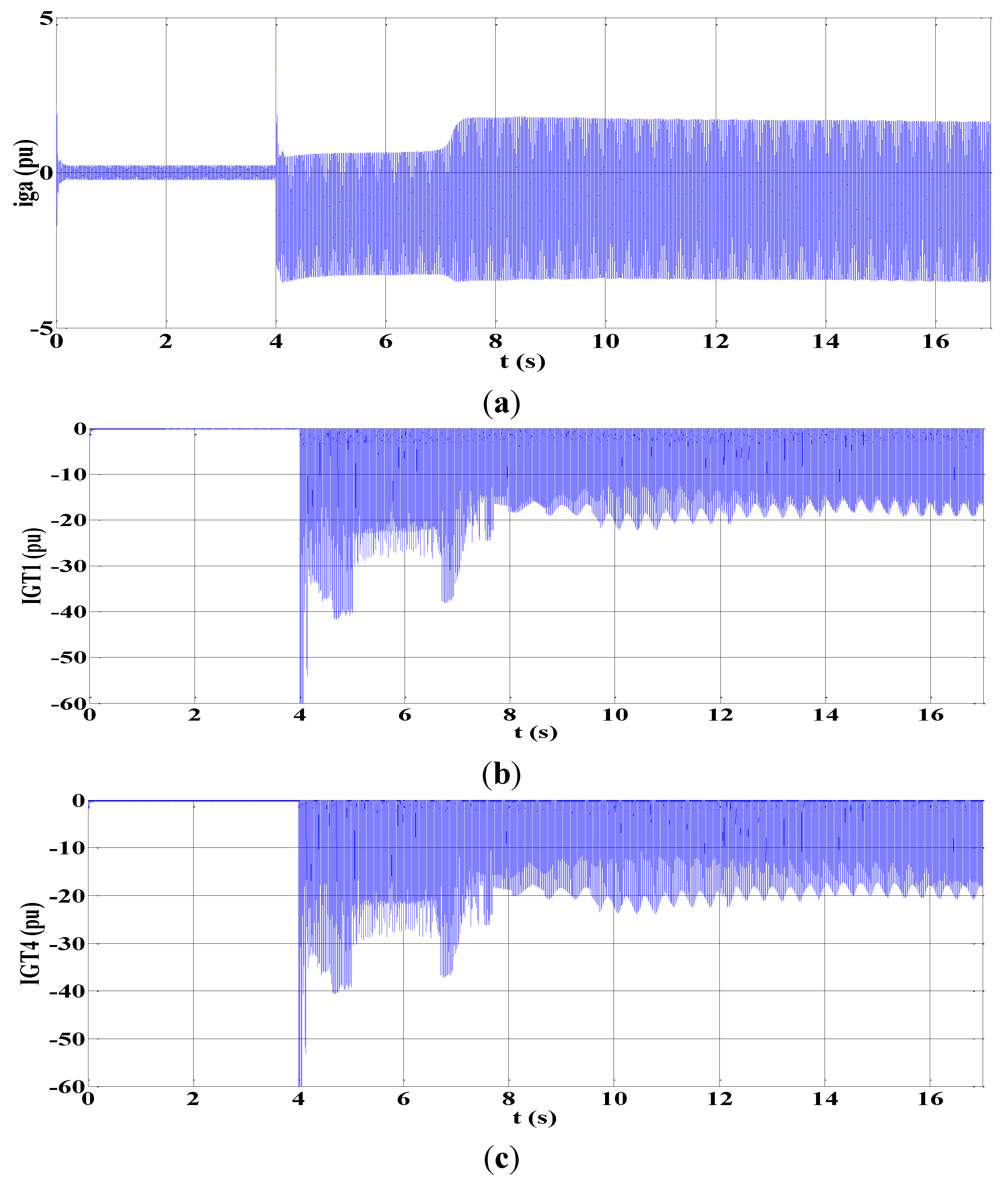
t = 4 s a short-circuit occurred in T1 (upper IGBT, phase a). As in previous case, no change in IGBTs pulsation has been considered during the simulation, except for IGBT (1), which has been short-circuited (GSC phase current i
ga and currents through T1, T4 (IGT1, IGT4) that have been affected by (F2), are shown in
Figure 15, where very high current peak values can also be observed). The protection system has been considered not to be activated and the system has reached in a steady faulty state. Take in account the simulation results one can see that (F2) affects the operational behavior of the whole system and the consequences of this kind of fault are similar to the corresponding ones of fault (F1), but a little slighter. Initially, the transient phenomenon lasts less than that in case of (F1) (from
t = 4 s to
t = 10 s). The electromagnetic torque oscillation is smaller than the previous case, so the danger for mechanical part breakdown is lower (
Figure 16). Rotor speed n
r (rpm) (
Figure 17) increases to 2200 rpm (pitch control could be possibly activated, but due to the fact that it consists of mechanical parts, it has high time constant) and finally decreases at 1530 rpm (smoother reaction than under (F1)). Also, pulsations appear in stator active power.
Figure 18 shows that (F2) has a high impact on the dc link voltage as it decreases significantly and becomes almost zero. Both rotor (
Figure 19) and stator (
Figure 20) currents are affected by (F2). More specifically, a dc component and very high peak values appear in stator currents—Approximately 3.5 times the nominal value during the transient condition and 1.8 times after system equilibration (different and smoother reaction than under (F1)), while rotor currents get high values. Finally, in
Figure 21 and
Figure 22 one can see that both GSC line currents I
gabc and grid phase currents I
gridabc get high peak values (3.5–4 times the nominal value) and a dc component also appears, that could cause saturation or damage in the grid-side filter and the transformer.
As in the previous case one can conclude that an adequate control and a protection system must be adopted for fault clearance, system protection during fault and possible DFIG disconnection. As in previous case a way to protect the system is measuring rotor phase currents, comparing their values with a threshold and when it has been exceeded a command to interrupt the IGBTs pulsating must be given.
Figure 15.
Waveforms of the characteristic variables of the Grid Side Converter (GSC): (a) Grid Side Converter (GSC) phase current iga, (b) Current through Insulated Gate Bipolar Transistor (IGBT) (1), (c) Current through Insulated Gate Bipolar Transistor (IGBT) (4) (short-circuit happens at t = 4 s for all waveforms).
Figure 15.
Waveforms of the characteristic variables of the Grid Side Converter (GSC): (a) Grid Side Converter (GSC) phase current iga, (b) Current through Insulated Gate Bipolar Transistor (IGBT) (1), (c) Current through Insulated Gate Bipolar Transistor (IGBT) (4) (short-circuit happens at t = 4 s for all waveforms).
Figure 16.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 16.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 17.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 17.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 18.
DC link voltage (short-circuit happens at t = 4 s).
Figure 18.
DC link voltage (short-circuit happens at t = 4 s).
Figure 19.
Rotor currents (short-circuit happens at t = 4 s).
Figure 19.
Rotor currents (short-circuit happens at t = 4 s).
Figure 20.
Stator currents (short-circuit happens at t = 4 s).
Figure 20.
Stator currents (short-circuit happens at t = 4 s).
Figure 21.
Grid Side Converter (GSC) phase currents Igabc (short-circuit happens at t = 4 s).
Figure 21.
Grid Side Converter (GSC) phase currents Igabc (short-circuit happens at t = 4 s).
Figure 22.
Grid phase currents Igridabc (short-circuit happens at t = 4 s).
Figure 22.
Grid phase currents Igridabc (short-circuit happens at t = 4 s).
4.3. Short-Circuit in Two Rotor Terminals (Phase-to-Phase Short-Circuit) (F3)
In this section the DFIG behavior under fault (F3)—
Figure 1—is studied. DFIG has been operated in supersynchronous mode (
nr = 1800 rpm > n
s = 1500 rpm—Synchronous speed) and at
t = 4 s short-circuit occurred in two rotor terminals—Phase-to-phase short-circuit (b, c). The protection system has been considered not to be activated and the system has reached in a steady faulty state. Initially, a slight transient phenomenon happens, which lasts for a time interval of 2 s (from
t = 4 s to
t = 6 s). A pulsating torque (t
e) has been caused (
Figure 23) with great low frequency oscillations and has as a result severe vibration on the mechanical part of the system (turbine-generator-gearbox) and maybe total breakdown of the system (similar to the corresponding one under (F1)-
Figure 7). Rotor speed n
r (
Figure 24) decreases and oscillates at 1570 rpm (±30 rpm). Furthermore, pulsations appear in stator active power, which is no more regulated and this could cause problems to the grid.
Figure 25 shows that (F3) has a high effect on the dc link voltage as it decreases significantly. Both rotor (
Figure 26) and stator (
Figure 27) currents are affected by (F3). More specifically, very high peak values appear in rotor currents—approximately four times the nominal value during the transient condition and two times after system equilibration—and a high harmonic content appears. Stator currents get high values and a high harmonic content appears too. Finally, in
Figure 28 and
Figure 29 one can see that (F3) causes a great increase of the peak value (3.5–4 times the nominal value) and oscillations in both GSC line currents I
gabc and grid phase currents I
gridabc.
Figure 23.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 23.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 24.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 24.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 25.
DC link voltage (short-circuit happens at t = 4 s).
Figure 25.
DC link voltage (short-circuit happens at t = 4 s).
Figure 26.
Rotor currents (short-circuit happens at t = 4 s).
Figure 26.
Rotor currents (short-circuit happens at t = 4 s).
Figure 27.
(a) Stator currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 27.
(a) Stator currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 28.
(a) GSC line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 28.
(a) GSC line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 29.
(a) Grid line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 29.
(a) Grid line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
As it is also concluded for this case, a specific control and a protection system must be considered to face possible problems to system operation. Both generator windings and converter electronic power switches danger to be damaged (along with the mechanical part of DFIG due to strong oscillations).
4.4. Short-Circuit in Three Rotor Terminals (Three Phase Short-Circuit) (F4)
In this section the DFIG behavior under fault (F4)—
Figure 1—is studied. DFIG has been operated in supersynchronous mode (
nr = 1800 rpm >
ns = 1500 rpm—Synchronous speed) and at
t = 4 s a short-circuit occurred in three rotor terminals—three phase short-circuit. The protection system has been considered not to be activated and the system has reached in a steady faulty state. Initially, a large (larger than during (F3)) transient phenomenon happens, which lasts for a time interval of 6 s (from
t = 4 s to
t = 10 s). The torque pulsations are not as great as under (F3) (
Figure 30) so the mechanical part of the system (turbine-generator-gearbox) is not suffered from such strong vibrations. Rotor speed n
r (rpm) (
Figure 31) decreases at 1527 rpm (very close to synchronous speed).
Figure 32 shows that (F4) has a high effect on the dc link voltage as it decreases significantly. Both rotor (
Figure 33) and stator (
Figure 34) currents are affected by (F4). More specifically, very high peak values appear—approximately four times the nominal value during the whole transient condition, which lasts for a long time, and 1.5 times after system equilibration. Finally, in
Figure 35 and
Figure 36 one can see that (F4) causes a great increase of the peak value (3.5–4 times the nominal value) and oscillations in both GSC line currents I
gabc and grid phase currents I
gridabc.
Figure 30.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 30.
Electromagnetic torque (short-circuit happens at t = 4 s).
Figure 31.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 31.
Rotor speed nr (short-circuit happens at t = 4 s).
Figure 32.
DC link voltage (short-circuit happens at t = 4 s).
Figure 32.
DC link voltage (short-circuit happens at t = 4 s).
Figure 33.
Rotor currents (short-circuit happens at t = 4 s).
Figure 33.
Rotor currents (short-circuit happens at t = 4 s).
Figure 34.
(a) Stator currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 34.
(a) Stator currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 35.
(a) Grid Side Converter (GSC) line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 35.
(a) Grid Side Converter (GSC) line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 36.
(a) Grid line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
Figure 36.
(a) Grid line currents (short-circuit happens at t = 4 s), (b) zoom of (a).
As it has been concluded from the above results both generator windings and converter electronic power switches danger to be damaged due to the high currents peak values, but in this case the vibrations of the mechanical part are slighter.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


































