The Decision making System for Condition Monitoring of Induction Motors Based on Vector Control Model

Abstract
:1. Introduction
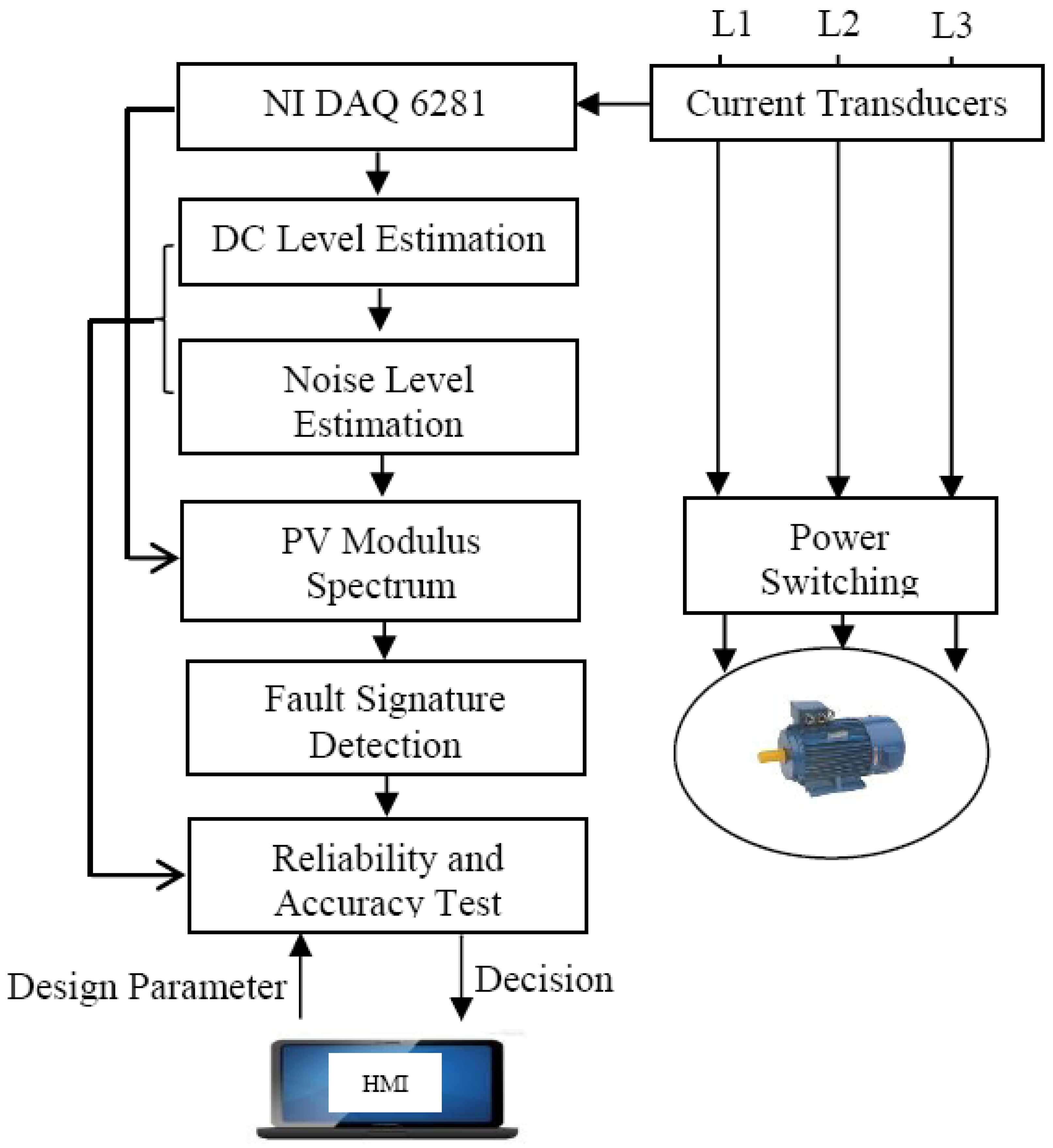
2. Design of Fault Diagnosis System Based on PVMSA
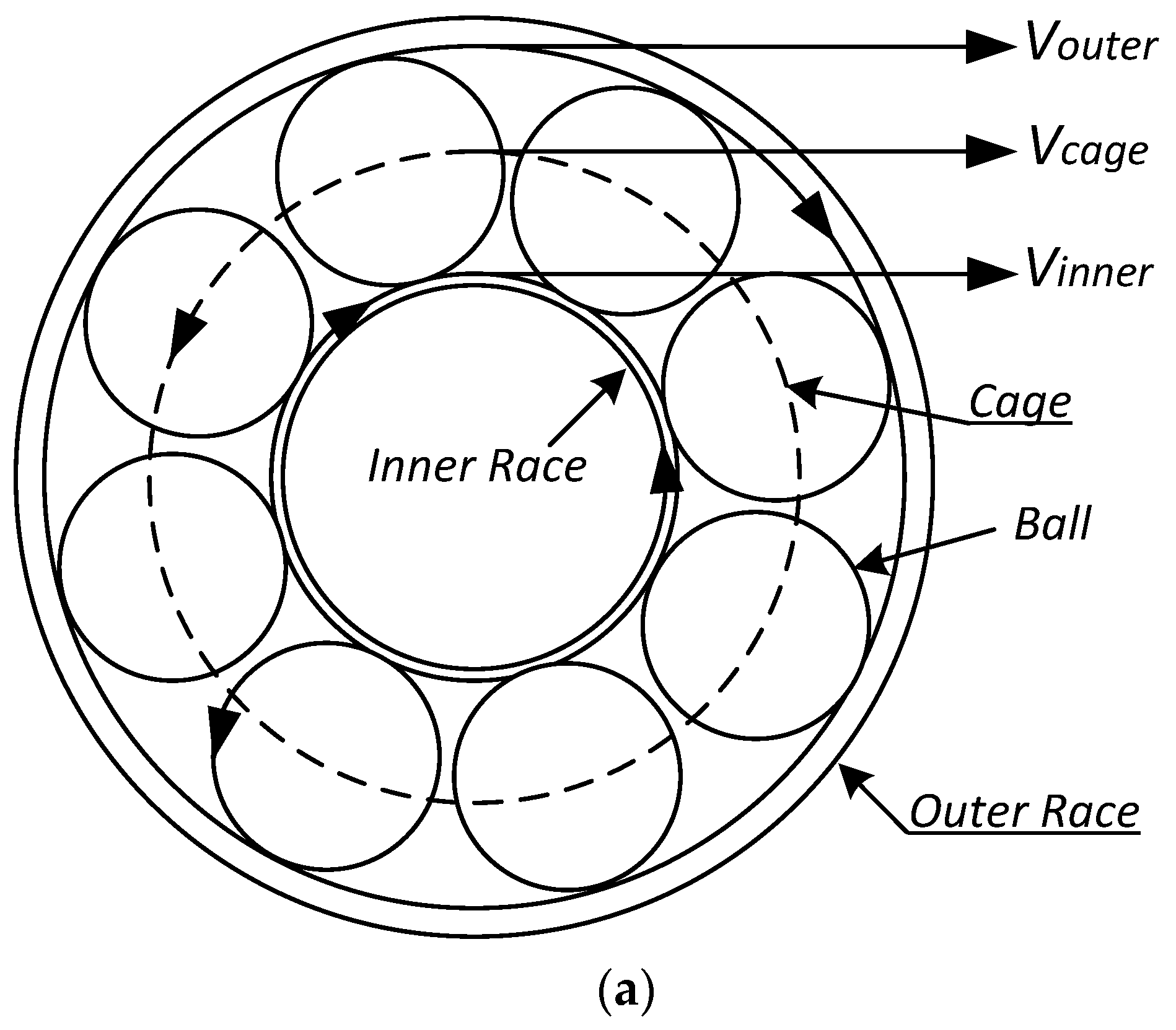
- is the linear velocity of the bearing outer race.
- is the linear velocity of the bearing inner race.
- is the ball diameter (6 mm).
- is the pitch diameter of bearing (25 mm).
- α is the ball contact angle (zero degree).
- is the bearing inner race frequency.
- is the bearing outer race frequency.
- is the radius of inner race of the bearing (8 mm).
- is the radius of outer race of the bearing (17.5 mm).
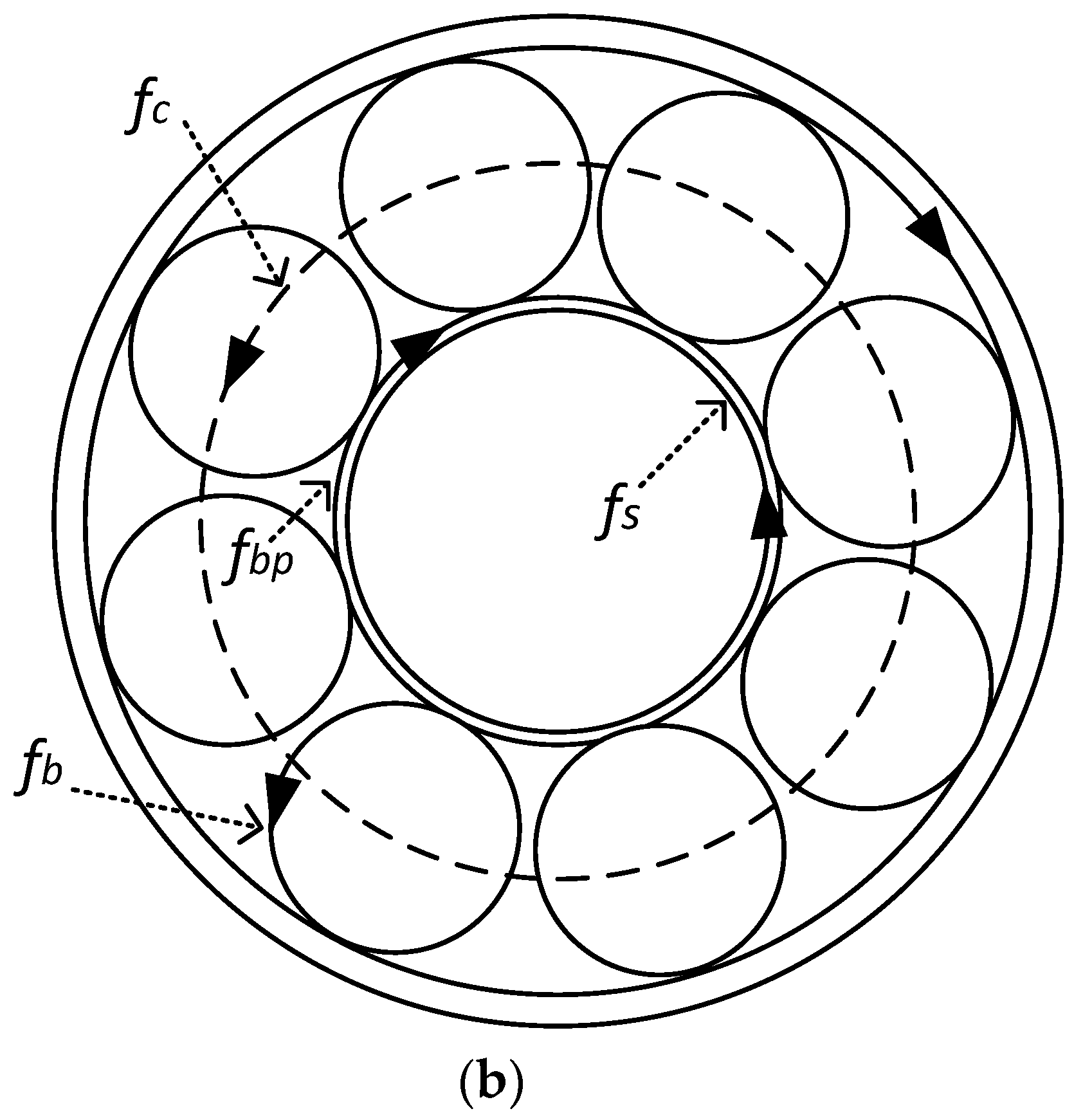
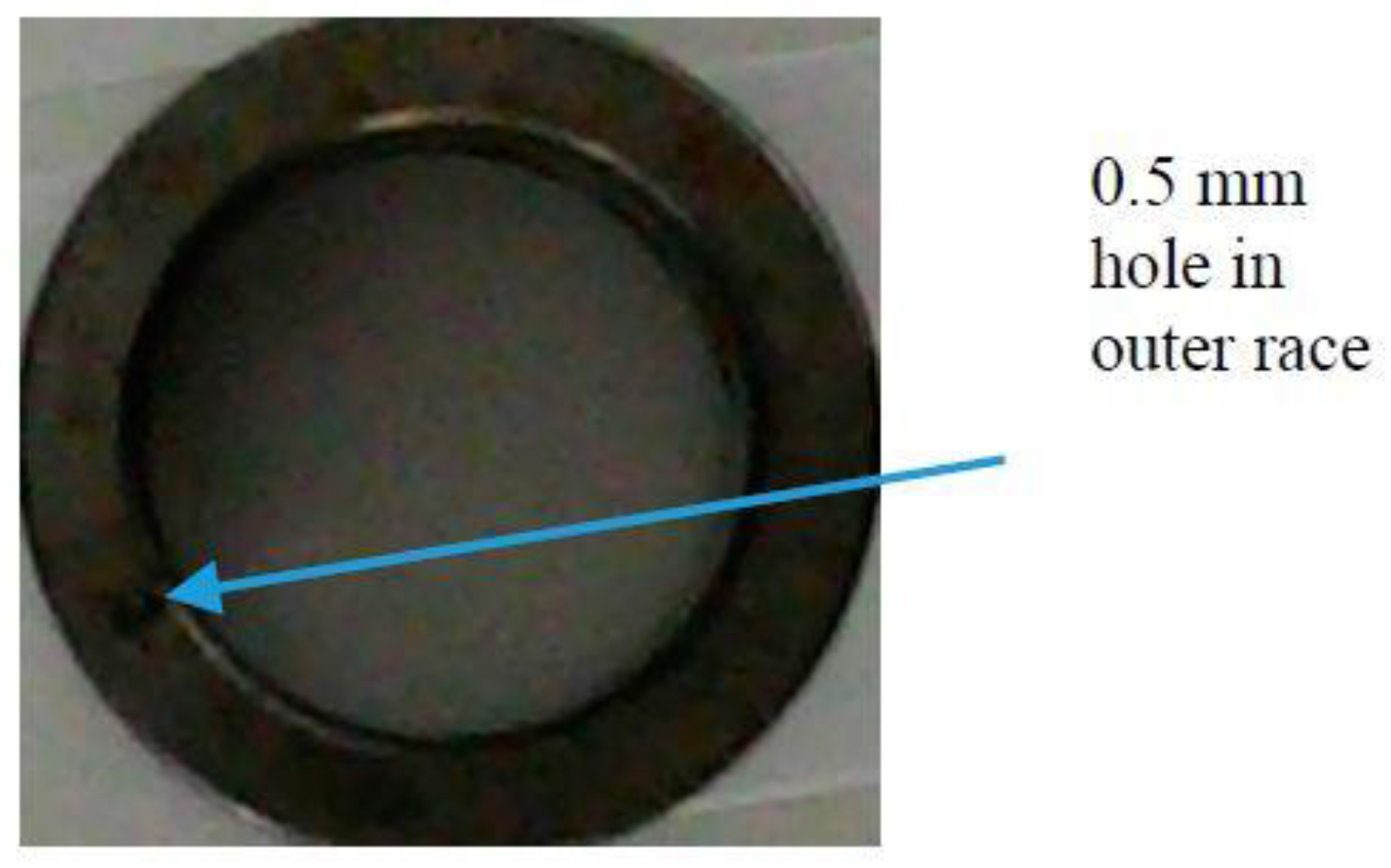
2.1. Derivation of Outer Race Defect Frequency
- is the bearing outer race characteristic defect frequency.
- is the number of balls inside the bearing (8 balls).
2.2. Background of Park Vector Approach
- is the fundamental current
- is the frequency of
- is the initial phase angle of fundamental current.
- is the lower side band at of
- is the upper side band of .
- is the phase angle of the lower side band component.
- is the phase angle of the upper side band component.
3. Design of Reliable Decision Making System
- is the bias of the measured signal.
- is the amplitude of the harmonic.
- is the bearing outer race harmonic frequency.
- is the environment noise.
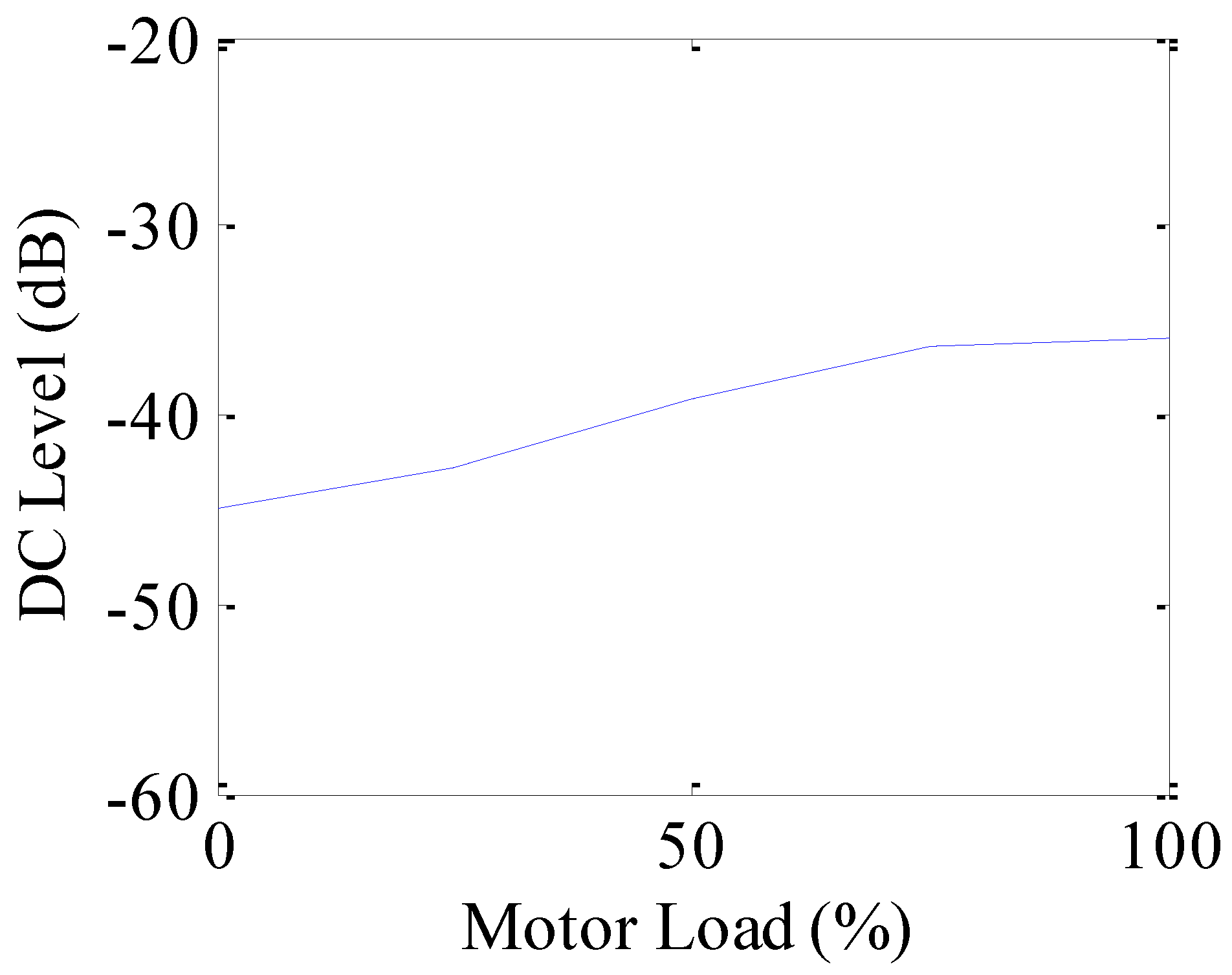
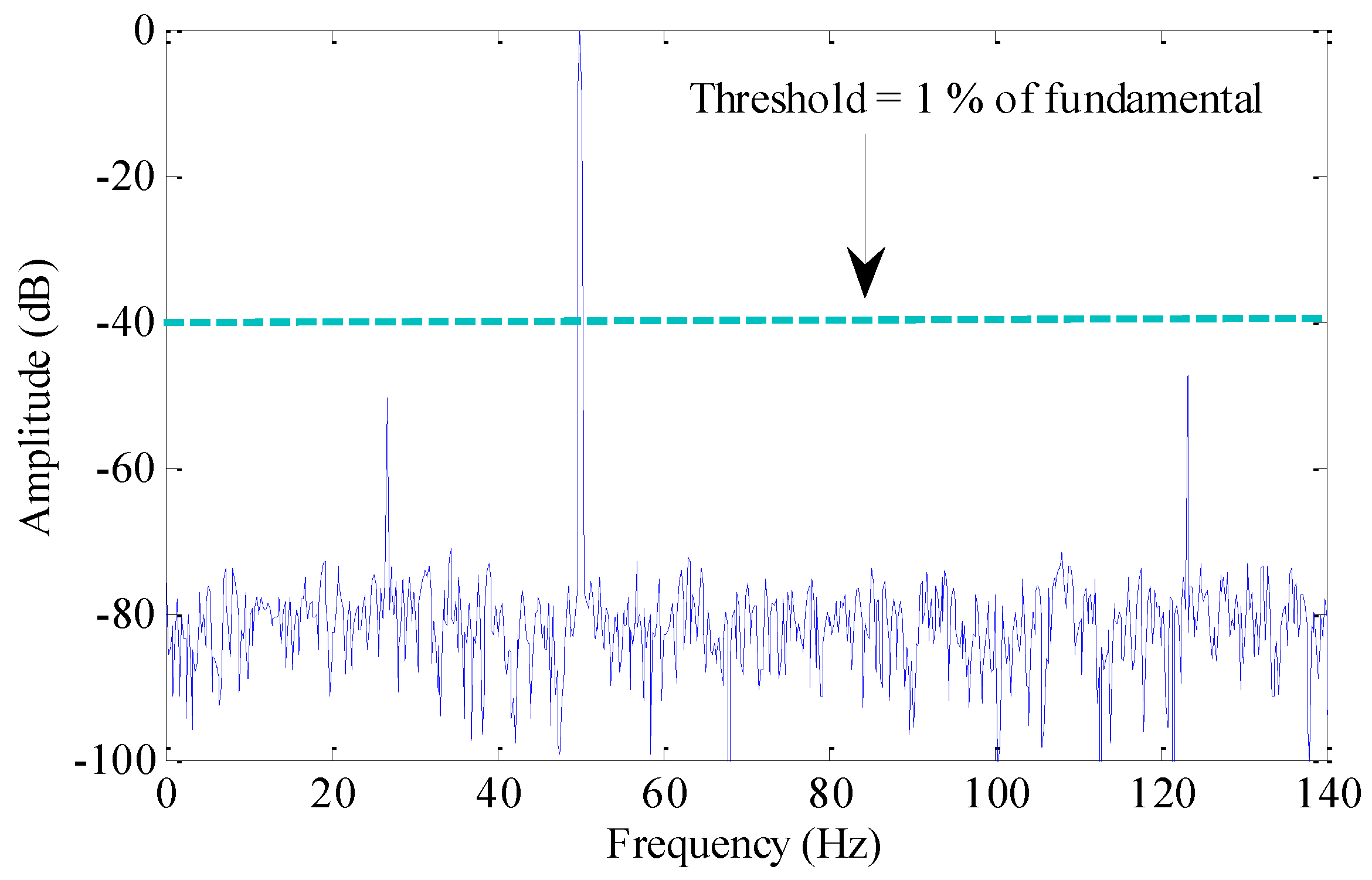
3.1. DC Bias Estimation
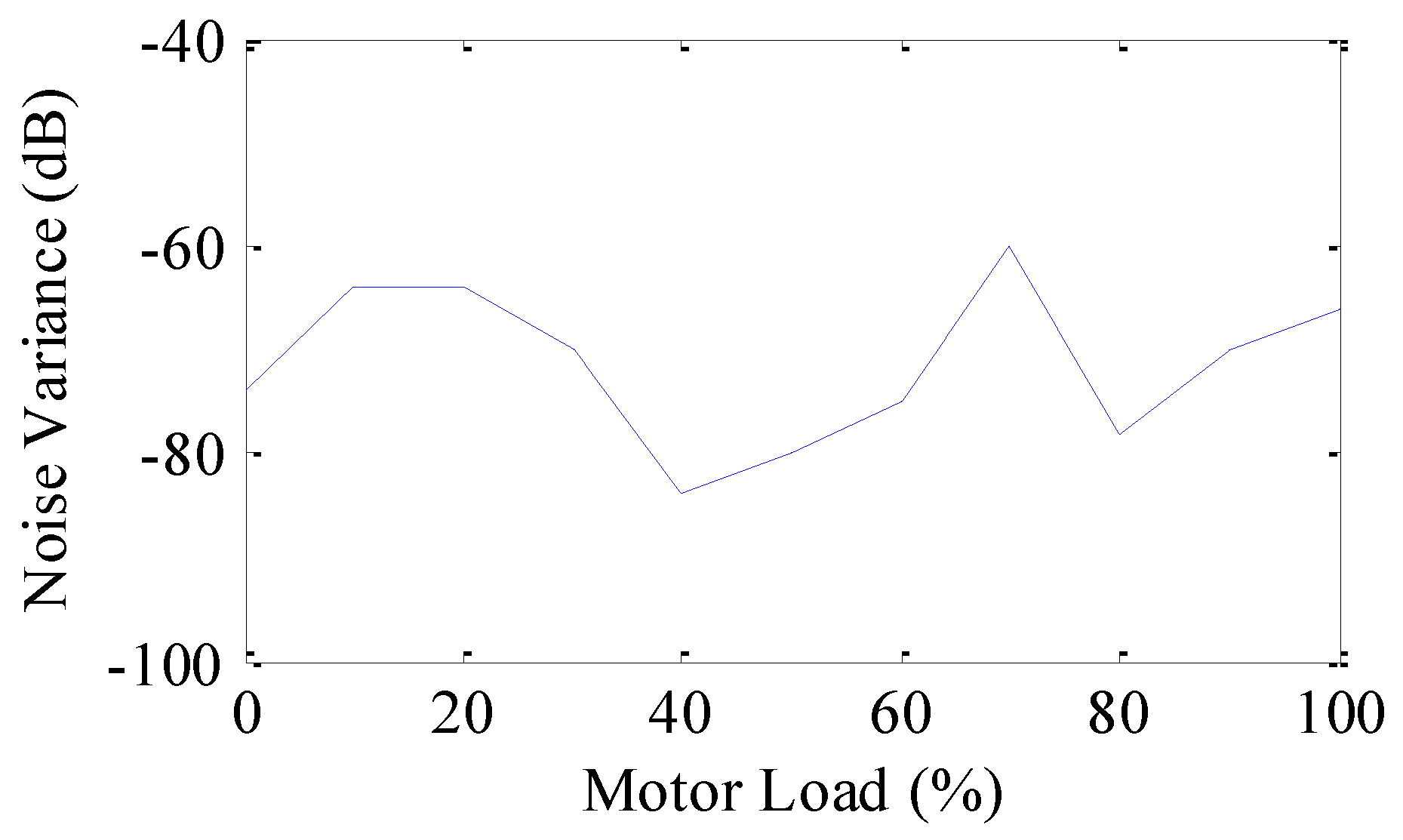
3.2. Noise Estimation
4. Results and Analysis
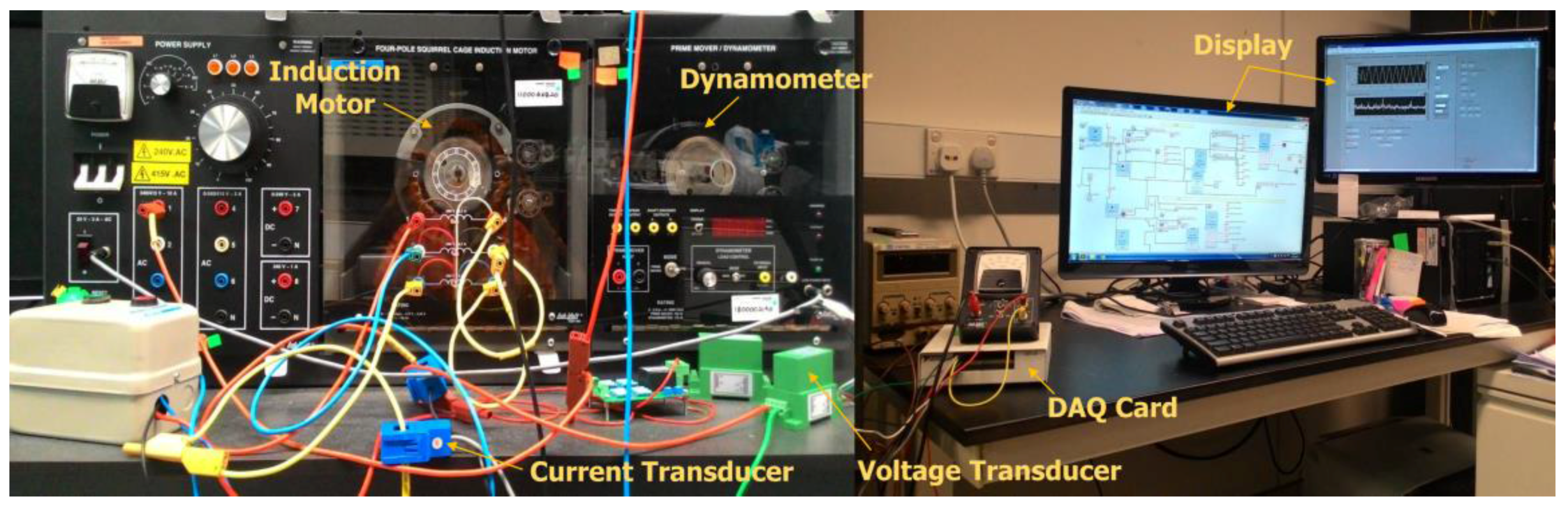
4.1. Test Rig Design
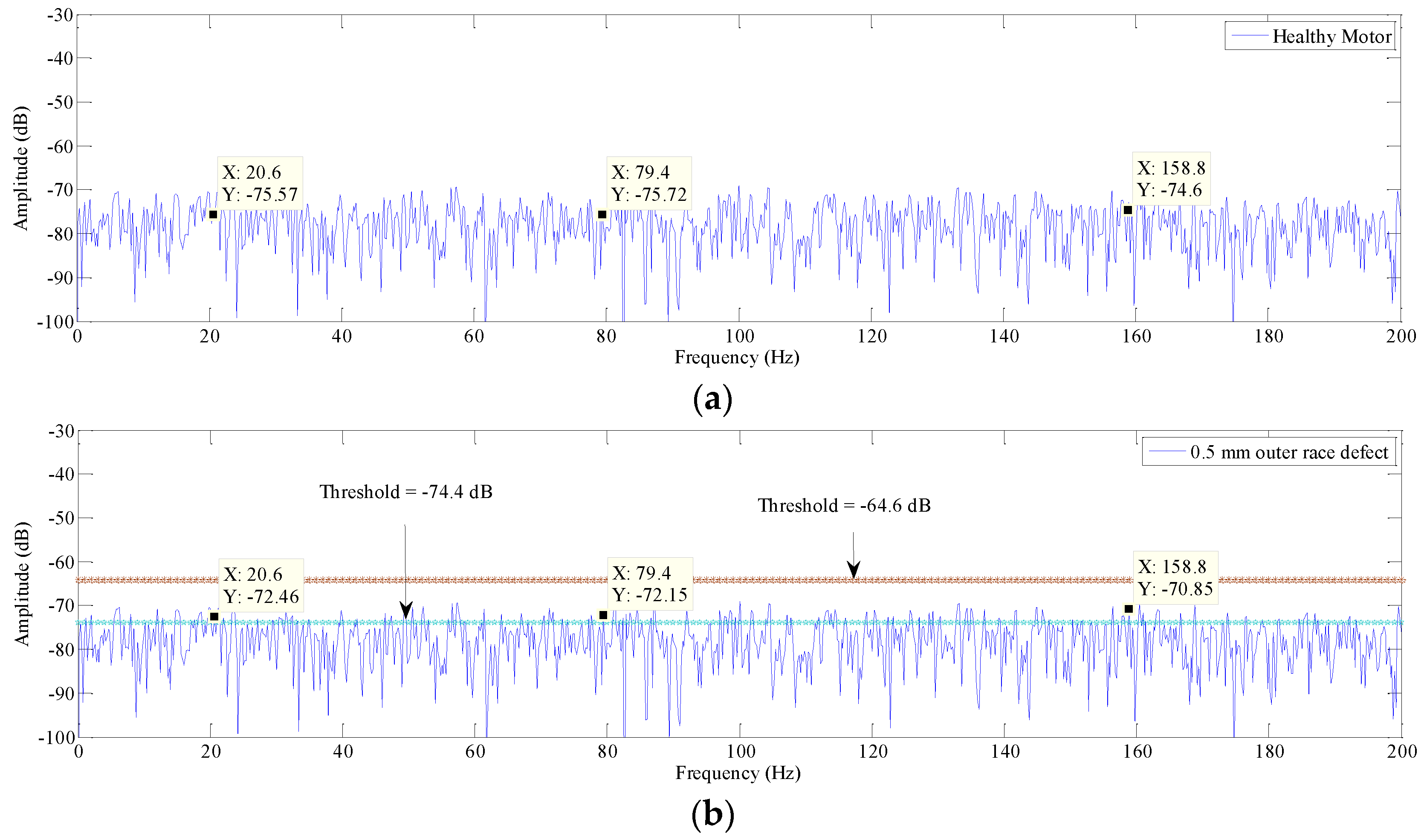
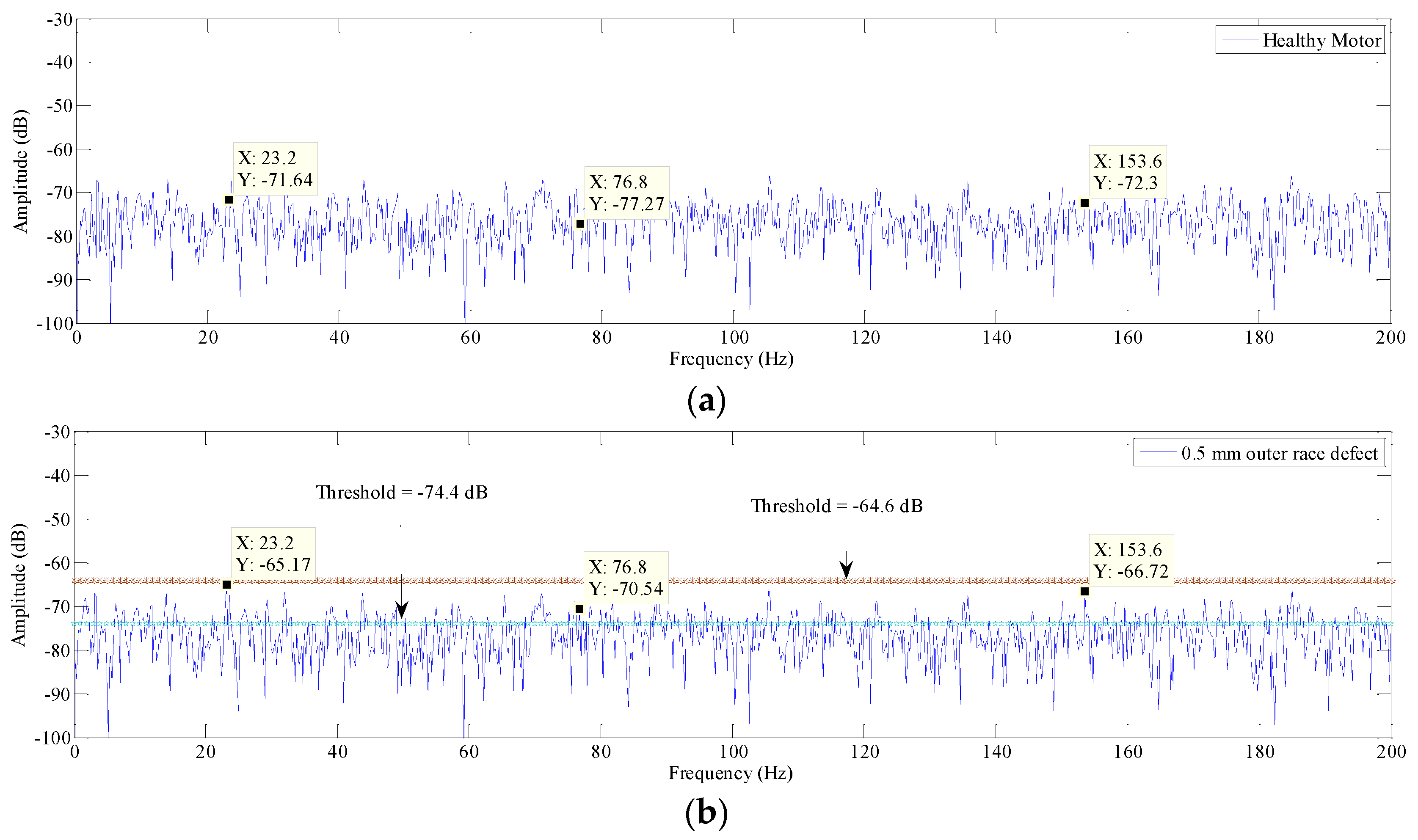
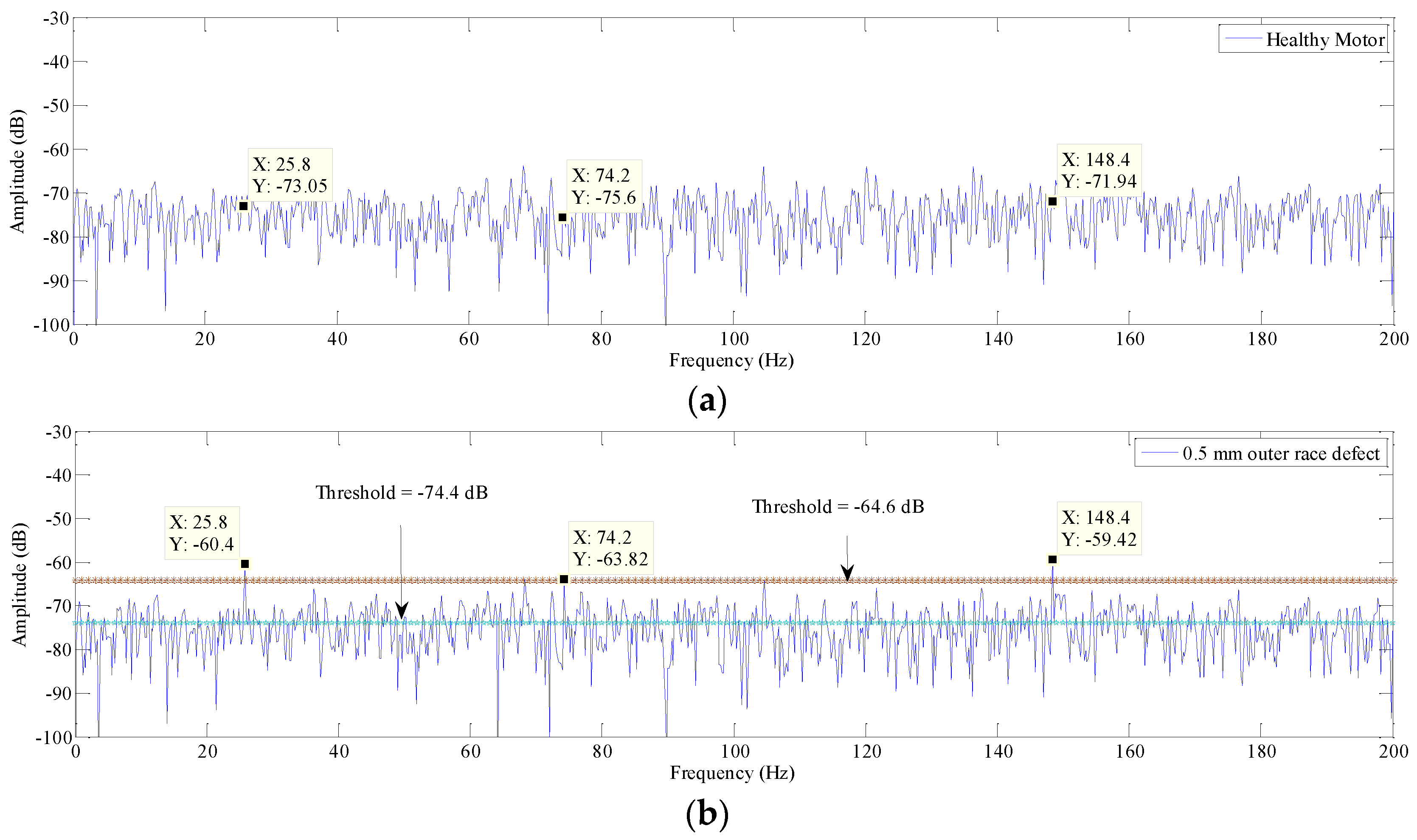
4.2. PVMSA Based Diagnosis of Outer Race Defects
4.3. Decision Making Based on Designed Threshold
5. Comparison of the Developed System with Previous Studies
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Widodo, A.; Yang, B. Support vector machine in machine condition monitoring and fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 2560–2574. [Google Scholar] [CrossRef]
- Immovilli, F.; Bianchini, C.; Cocconcelli, M.; Bellini, A.; Rubini, R. Bearing fault model for induction motor with externally induced vibration. IEEE Trans. Ind. Electron. 2013, 60, 3408–3418. [Google Scholar] [CrossRef]
- Stack, J.R.; Habetler, T.G.; Harley, R.G. Fault classification and fault signature production for rolling element bearing in electric machines. IEEE Trans. Ind. Appl. 2004, 3, 735–739. [Google Scholar] [CrossRef]
- Irfan, M.; Saad, N.; Ibrahim, R.; Asirvadam, V.S.; Magzoub, M. A Non Invasive method for condition monitoring of induction motors operating under arbitrary loading conditions. Arab. J. Sci. Eng. 2015. [Google Scholar] [CrossRef]
- Tavner, P.J.; Ran, L.; Pennman, J.; Sedding, H. Condition Monitoring of Rotating Electrical Machines; Research Studies Press Ltd.: Letchworth, UK, 2008. [Google Scholar]
- Irfan, M.; Saad, N.; Ibrahim, R.; Asirvadam, V.S.; Magzoub, M. An intelligent fault diagnosis of induction motors in an arbitrary noisy environment. J. Nondestruct. Test. Eval. 2016, 35, 1–13. [Google Scholar] [CrossRef]
- Nejjari, H.; Benbouzid, M.E.E. Monitoring and diagnosis of induction motors electrical faults using a current Park’s vector pattern learning approach. IEEE Trans. Ind. Appl. 2000, 36, 730–735. [Google Scholar] [CrossRef]
- Irfan, M.; Saad, N.; Ibrahim, R.; Asirvadam, V.S. Analysis of bearing surface roughness defects in induction motors. J. Fail. Anal. Prev. 2015, 15, 730–736. [Google Scholar] [CrossRef]
- Alegranzi, S.B.; Gonçalves, J.F.; Gomes, H.M. Ball Bearing Vibration Monitoring for Fault Detection by the Envelope Technique. In Proceedings of the 10th World Congress on Computer Mechanics, São Paulo, Brazil, 8–13 July 2012. [Google Scholar]
- Esfahani, E.T.; Wang, S.; Sundararajan, V. Multisensor wireless system for eccentricity and bearing fault detection in induction motors. IEEE/ASME Trans. Mechatron. 2014, 19, 818–826. [Google Scholar] [CrossRef]
- Patela, V.N.; Tandonb, N.; Pandeyc, R.K. Vibrations generated by rolling element bearings having multiple local defects on races. Procedia Technol. 2014, 14, 312–319. [Google Scholar] [CrossRef]
- Patela, V.N.; Tandonb, N.; Pandeyc, R.K. Vibration studies of dynamically loaded deep groove ball bearings in presence of local defects on races. Procedia Eng. 2013, 64, 1582–1591. [Google Scholar] [CrossRef]
- Pazouki, E.; Choi, S. Fault Diagnosis and Condition Monitoring of Bearing Using Multisensory Approach Based Fuzzy-Logic Clustering. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015. [Google Scholar]
- Patela, V.N.; Tandonb, N.; Pandeyc, R.K. Defect detection in deep groove ball bearing in presence of external vibration using envelope analysis and Duffing oscillator. Measurement 2012, 45, 960–970. [Google Scholar] [CrossRef]
- Choi, S.D.; Akin, B.; Rahimian, M.; Toliyat, H.A. Implementation of fault diagnosis algorithm for induction machines based on advanced digital signal processing techniques. IEEE Trans. Ind. Electron. 2011, 58. [Google Scholar] [CrossRef]
- Akin, B.; Choi, S.D.; Orguner, U.; Toliyat, H.A. A simple real time fault signature monitoring tool for motor drive imbedded fault diagnosis systems. IEEE Trans. Ind. Electron. 2011, 58, 1990–2000. [Google Scholar] [CrossRef]
- Yepez, E.C.; Jaramillo, A.A.F.; Perez, A.G.; Troncoso, R.J.R.; Garcia, J.M.L. Real time condition monitoring on VSD-fed induction motors through statistical analysis and synchronous speed observation. Int. Trans. Electr. Energy Syst. 2014, 25, 1657–1672. [Google Scholar] [CrossRef]
- Bellini, A.; Yazidi, A.; Filippetti, F.; Rossi, C.; Capolino, G.A. High frequency resolution techniques for rotor fault detection of induction machines. IEEE Trans. Ind. Electron. 2008, 55, 4200–4209. [Google Scholar] [CrossRef]
- Qiu, H.; Lee, J.; Lin, J.; Yu, B. Wavelet filter-based weak signature detection method and its application on rolling element bearing prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Jiang, R.; Chen, J.; Dong, G.; Liu, T.; Xiao, W. The weak fault diagnosis and condition monitoring of rolling element bearing using minimum entropy deconvolution and envelope spectrum. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2012, 227, 1116–1129. [Google Scholar] [CrossRef]
- Lin, J.; Qu, L. Feature extraction based on Morlet wavelet and its application for mechanical fault diagnosis. J. Sound Vib. 2000, 234, 135–148. [Google Scholar] [CrossRef]
- He, Q.; Wang, J. Effects of multiscale noise tuning on stochastic resonance for weak signal detection. Digit. Signal Process. 2012, 22, 614–621. [Google Scholar] [CrossRef]
- Urbanek, J.; Barszcz, T.; Antoni, J. Time–frequency approach to extraction of selected second-order cyclostationary vibration components for varying operational conditions. Measurement 2013, 46, 1454–1463. [Google Scholar] [CrossRef]
- Shi, J.; Liang, M. Intelligent bearing fault signature extraction via iterative oscillatory behavior based signal decomposition (IOBSD). Expert Syst. Appl. 2016, 45, 40–55. [Google Scholar] [CrossRef]
- Zhou, W.; Habetler, T.G.; Harley, R.G. Bearing fault detection via stator current noise cancellation and statistical control. IEEE Trans. Ind. Electron. 2008, 55, 4260–4469. [Google Scholar] [CrossRef]
- Zhou, W.; Habetler, T.G.; Harley, R.G. Bearing Condition Monitoring Methods for Electric Machines: A General Review. In Proceedings of the IEEE International System Diagnostics Electric Machines & Power Electronics Drives, Cracow, Poland, 6–8 September 2007. [Google Scholar]
- Zhao, M.; Lin, J.; Miao, Y.; Xu, X. Detection and recovery of fault impulses via improved harmonic product spectrum and its application in defect size estimation of train bearings. Measurement 2016, 91, 421–439. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Yang, H.-T.; Liao, C.-C. A de-noising scheme for enhancing wavelet-based power quality monitoring system. IEEE Trans. Power Deliv. 2001, 16, 353–360. [Google Scholar] [CrossRef]
- Nikolaou, N.; Antoniadis, I. Rolling element bearing fault diagnosis using wavelet packets. NDT E Int. 2002, 35, 197–205. [Google Scholar] [CrossRef]
- Nguyen, P.; Kang, M.; Kim, J.-M.; Ahn, B.-H.; Ha, J.-M.; Choi, B.K. Robust condition monitoring of rolling element bearings using de-noising and envelope analysis with signal decomposition techniques. Expert Syst. Appl. 2015, 42, 9024–9032. [Google Scholar] [CrossRef]
- Rafiee, J.; Rafiee, M.; Tse, P. Application of mother wavelet functions for automatic gear and bearing fault diagnosis. Expert Syst. Appl. 2010, 37, 4568–4579. [Google Scholar] [CrossRef]
- Li, Z.; He, Z.; Zi, Y.; Wang, Y. Customized wavelet denoising using intra-and inter-scale dependency for bearing fault detection. J. Sound Vib. 2008, 313, 342–359. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Nandi, S.; Choi, S.; Kelk, H.S. Electric Machines, Modelling, Condition Monitoring and Fault Diagnosis; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Abingdon, UK, 2012. [Google Scholar]
- Jung, J.H.; Lee, J.J.; Kwon, B.H. Online diagnosis of induction motor using MCSA. IEEE Trans. Ind. Appl. 2006, 53, 1842–1852. [Google Scholar] [CrossRef]
- Rajagopalan, S.; Habetler, T.G.; Harley, R.G.; Restrepo, J.A.; Alle, J.M. Non-stationary motor fault detection using recent quadratic time-frequency representations. IEEE Trans. Ind. Appl. 2006, 5, 2333–2339. [Google Scholar]
- Onel, I.Y.; Benbouzid, M.E.H. Induction motor bearing failure detection and diagnosis: Park and concordia transform approaches comparative study. IEEE/ASME Trans. Mechatron. 2008, 13. [Google Scholar] [CrossRef] [Green Version]
- Faiz, J.; Ojaghi, M. Different indexes for eccentricity faults diagnosis in three phase squirrel-cage induction motors: A review. Mechatronics 2009, 19, 2–13. [Google Scholar] [CrossRef]
- Zarei, J.; Poshtan, J. An advanced Park’s vectors approach for bearing fault detection. Tribol. Int. 2009, 42, 213–219. [Google Scholar] [CrossRef]
- Salem, S.B.; Touti, W.; Bacha, K.; Chaari, A. Induction Motor Mechanical Fault Identification Using Park Vector Approach. In Proceedings of the International Conference on Electrical Engineering and Software Applications (ICEESA), Hammamet, Tunisia, 21–23 March 2013. [Google Scholar]
- Blodt, M.; Granjon, P.; Raison, B.; Rostaing, G. Models for bearing damage detection in induction motors using stator current monitoring. IEEE Trans. Ind. Electron. 2008, 55, 1813–1822. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G. A high-resolution frequency estimation method for three phase induction machine fault detection. IEEE Trans. Ind. Electron. 2007, 54, 2305–2314. [Google Scholar] [CrossRef]
- Önel, I.Y.; Ayçiçek, E.; Senol, I. An experimental study, about detection of bearing defects in inverter fed small induction motors by concordia transform. J. Intell. Manuf. 2009, 20, 243–247. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical machines—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Li, B.; Chow, M.; Tipsuwan, Y.; Hung, J.C. Neural-network-based motor rolling bearing fault diagnosis. IEEE Trans. Ind. Electron. 2000, 47, 1060–1069. [Google Scholar] [CrossRef]
- Silva, J.L.H.; Cardoso, A.J.M. Bearing Failures Diagnosis in Three phase Induction Motors by Extended Park’s Vector Approach. In Proceedings of the 31st Annual Conference of IEEE Industrial Electronics Society, Raleigh, NC, USA, 6–10 November 2005. [Google Scholar]
- Benbouzid, M.E.H.; Nejjari, H.; Beguenane, R.; Vieira, M. Induction motor asymmetrical faults detection using advanced signal processing techniques. IEEE Trans. Energy Convers. 1999, 14, 147–152. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation and Detection Theory; Prentice-Hall: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Vas, P. Parameter Estimation, Condition Monitoring and Diagnosis of Electrical Machines; Oxford University Press: New York, NY, USA, 1993. [Google Scholar]
- Levy, B.C. Principles of Signal Detection and Parameter Estimation; Springer: New York, NY, USA, 2008. [Google Scholar]
- Picot, A.; Obeid, Z.; Régnierl, J.; Poignant, S.; Darnis, O.; Maussion, P. Statistic-based spectral indicator for bearing fault detection in permanent-magnet synchronous machines using the stator current. Mech. Syst. Signal Process. 2014, 46, 424–441. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Conditions | Speed (rpm) | Characteristic Defect Frequency | ||
|---|---|---|---|---|
| (Hz) | (Hz) | (Hz) | ||
| No Load | 1480 | 79.4 | 158.8 | 20.6 |
| Medium Load | 1440 | 76.8 | 153.6 | 23.2 |
| Full Load | 1390 | 74.2 | 148.4 | 25.8 |
| Pitch diameter () | 25 mm |
| Ball diameter () | 6 mm |
| The contact angle of the ball with the race (α) | 0 |
| Number of balls | 8 |
| Load Level | Characteristic Defect Frequencies (Hz) | Change in Amplitude (dB) |
|---|---|---|
| No Load | 20.6, 79.4, 158.8 | 3 |
| Medium Load | 23.2, 76.8, 153.6 | 7 |
| Full Load | 25.8, 74.2, 148.4 | 13 |
| Motor Load | Fault Signature Amplitude (dB) | Fixed Threshold () Design | |||||||
|---|---|---|---|---|---|---|---|---|---|
| = −74.4 dB | = −64.6 dB | ||||||||
| Detection Accuracy | Remarks | k | Detection Accuracy | Remarks | |||||
| No Load | −72.15 | 1 | 15% | 85% | D | 3 | 0.0013% | 97.8% | MD |
| Medium Load | −70.54 | 0.7 | 24% | 76% | D | 2.3 | 0.01% | 99.99% | MD |
| Full Load | −63.82 | 0.55 | 29% | 71% | D | 2 | 0.022% | 97.8% | D |
| Motor Load | Fault Signature Amplitude (dB) | Adaptive Threshold ( Design | |||||||
|---|---|---|---|---|---|---|---|---|---|
| k = 1 | k = 3 | ||||||||
| Threshold 1 dB | Detection Accuracy | Remarks | Threshold 2 ( dB | Detection Accuracy | Remarks | ||||
| No Load | −72.15 | −74.4 | 15% | 85% | D | −64.6 | 0.0013% | 99.87% | MD |
| Medium Load | −70.54 | −71.6 | D | −62.3 | MD | ||||
| Full Load | −63.82 | −69 | D | −60.1 | MD | ||||
| Previous Studies | Current Study | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Reference | Year | Signal Analysis Technique | Threshold Design Technique | Designed Threshold Type | Impact of Load Variations | Signal Analysis Method | Threshold Design Technique | Designed Threshold Type | Impact of Load Variations |
| [36] | 2012 | MCSA | Statistically derived threshold | Adaptive | Only two levels of load variations were considered | PVMSA | Statistical threshold adaptive to arbitrary Environment condition in variable load of the motor | Both Fixed and Adaptive | Describes impact of load variations on the decision making |
| [38] | 2006 | MCSA | Pre-determined threshold | Adaptive | Not Given | ||||
| [37] | 2006 | MCSA | Zero input test based statistical analysis | Fixed | Not Given | ||||
| [53] | 2014 | MCSA | Reference based statistical analysis | Fixed | Four levels of speed variation were considered | ||||
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alwadie, A. The Decision making System for Condition Monitoring of Induction Motors Based on Vector Control Model. Machines 2017, 5, 27. https://doi.org/10.3390/machines5040027
Alwadie A. The Decision making System for Condition Monitoring of Induction Motors Based on Vector Control Model. Machines. 2017; 5(4):27. https://doi.org/10.3390/machines5040027
Chicago/Turabian StyleAlwadie, Abdullah. 2017. "The Decision making System for Condition Monitoring of Induction Motors Based on Vector Control Model" Machines 5, no. 4: 27. https://doi.org/10.3390/machines5040027
APA StyleAlwadie, A. (2017). The Decision making System for Condition Monitoring of Induction Motors Based on Vector Control Model. Machines, 5(4), 27. https://doi.org/10.3390/machines5040027