Equivalence Analysis of Mass and Inertia for Simulated Space Manipulator Based on Constant Mass

Abstract
:1. Introduction
2. Modeling of Simulated Manipulator
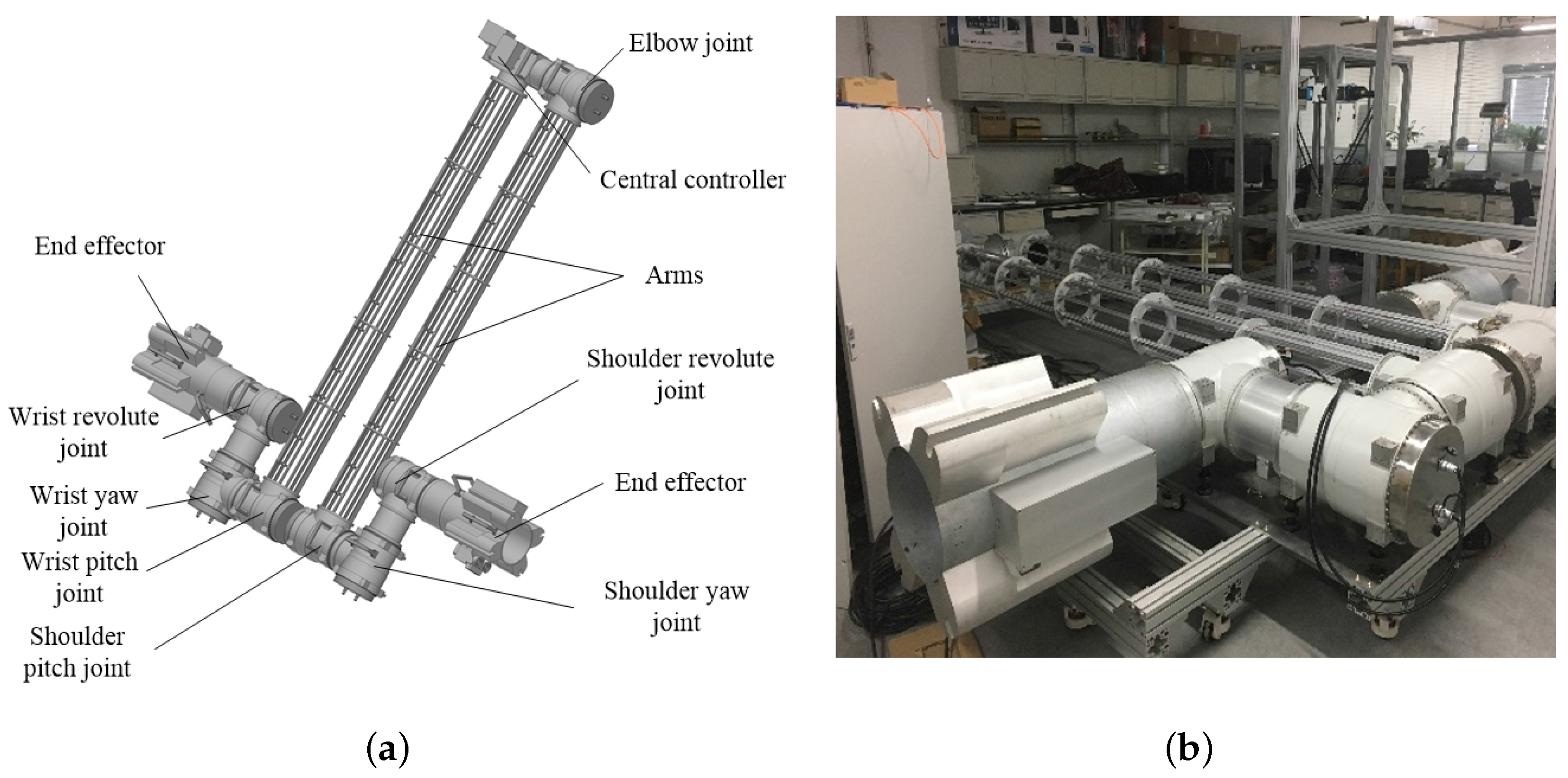
2.1. Introduction of Simulated Manipulator
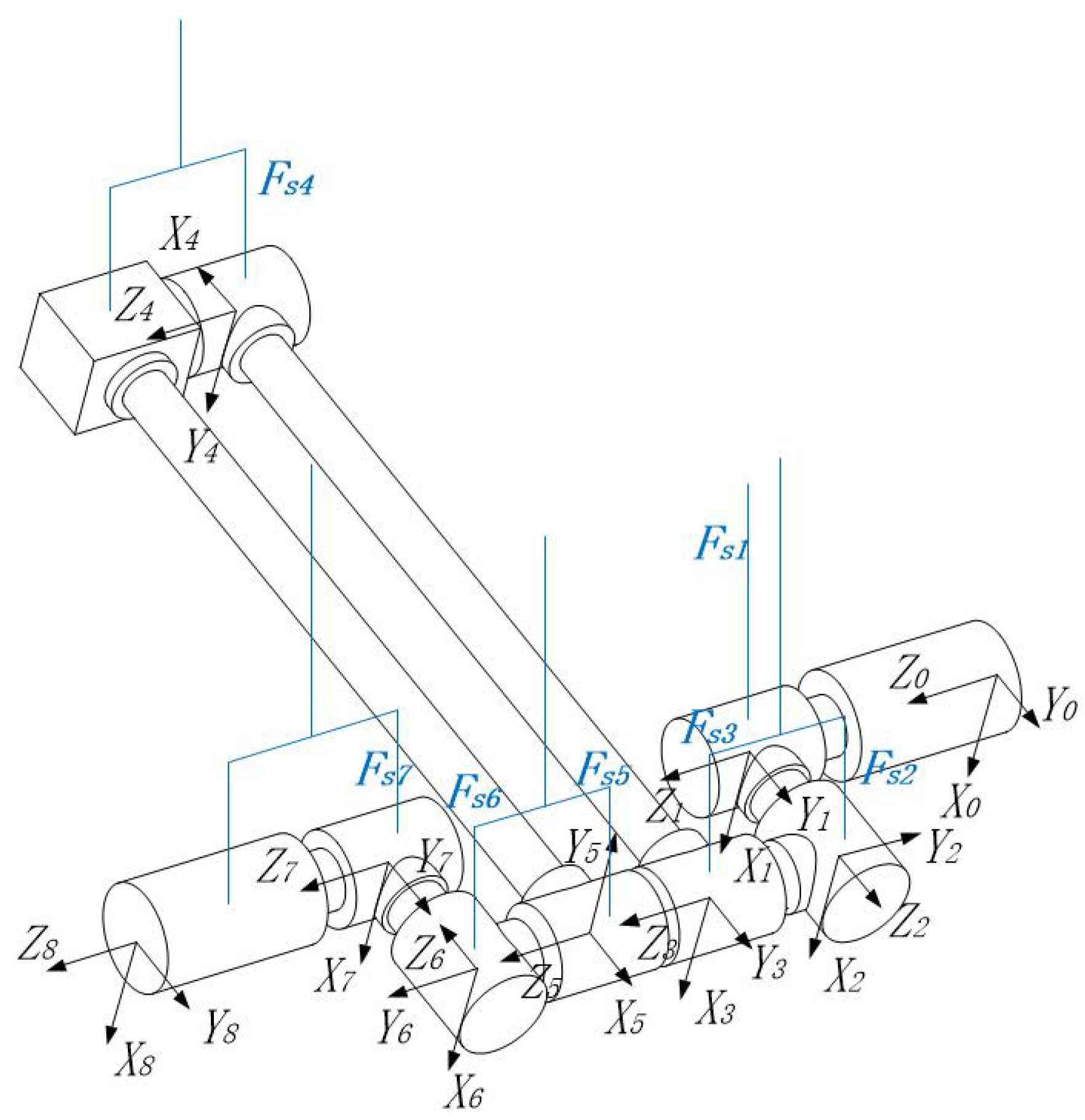
2.2. Kinematics of Manipulator
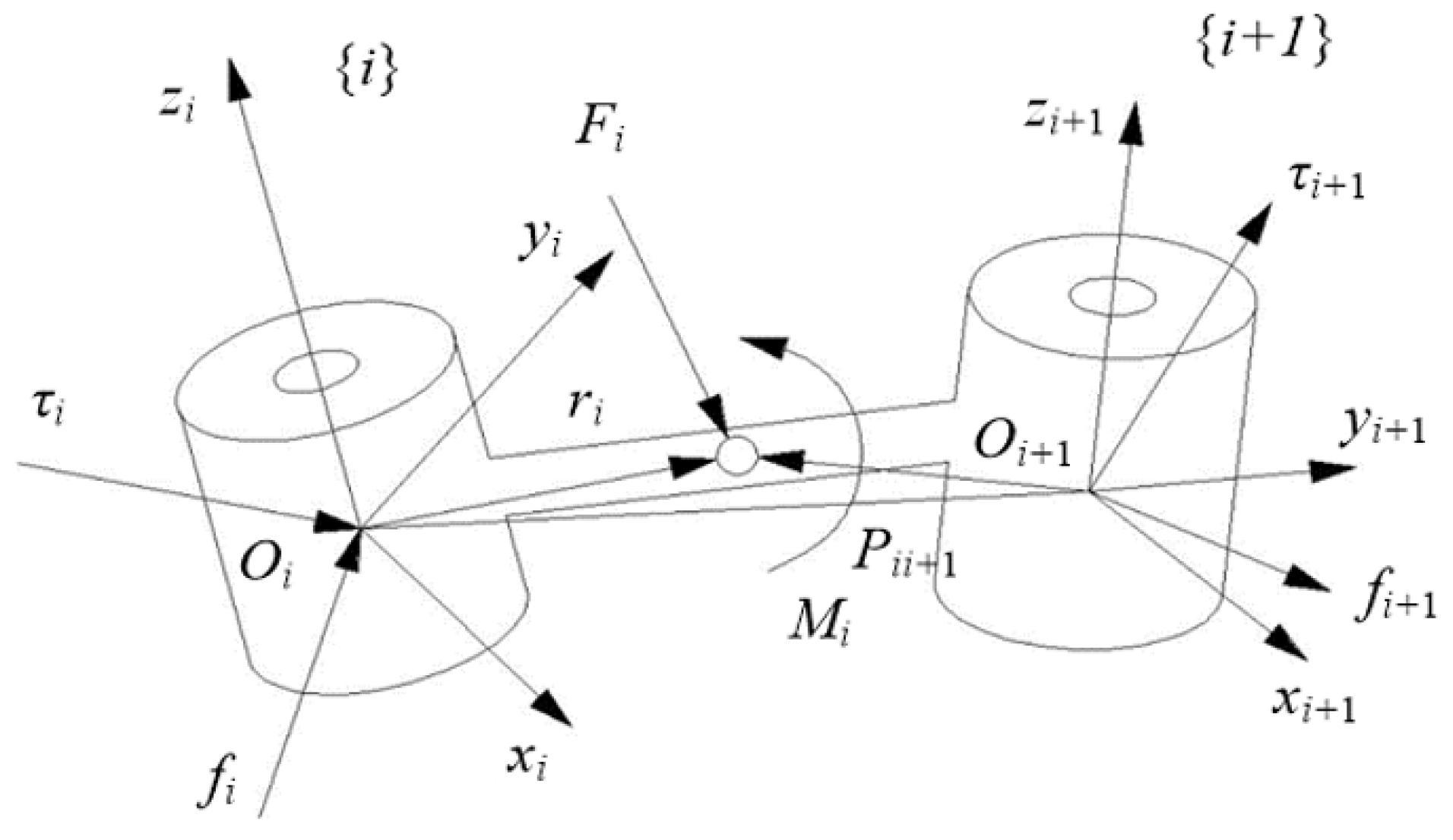
2.3. Dynamics of Manipulator
3. Optimized Design of Mass-Matching of Joints
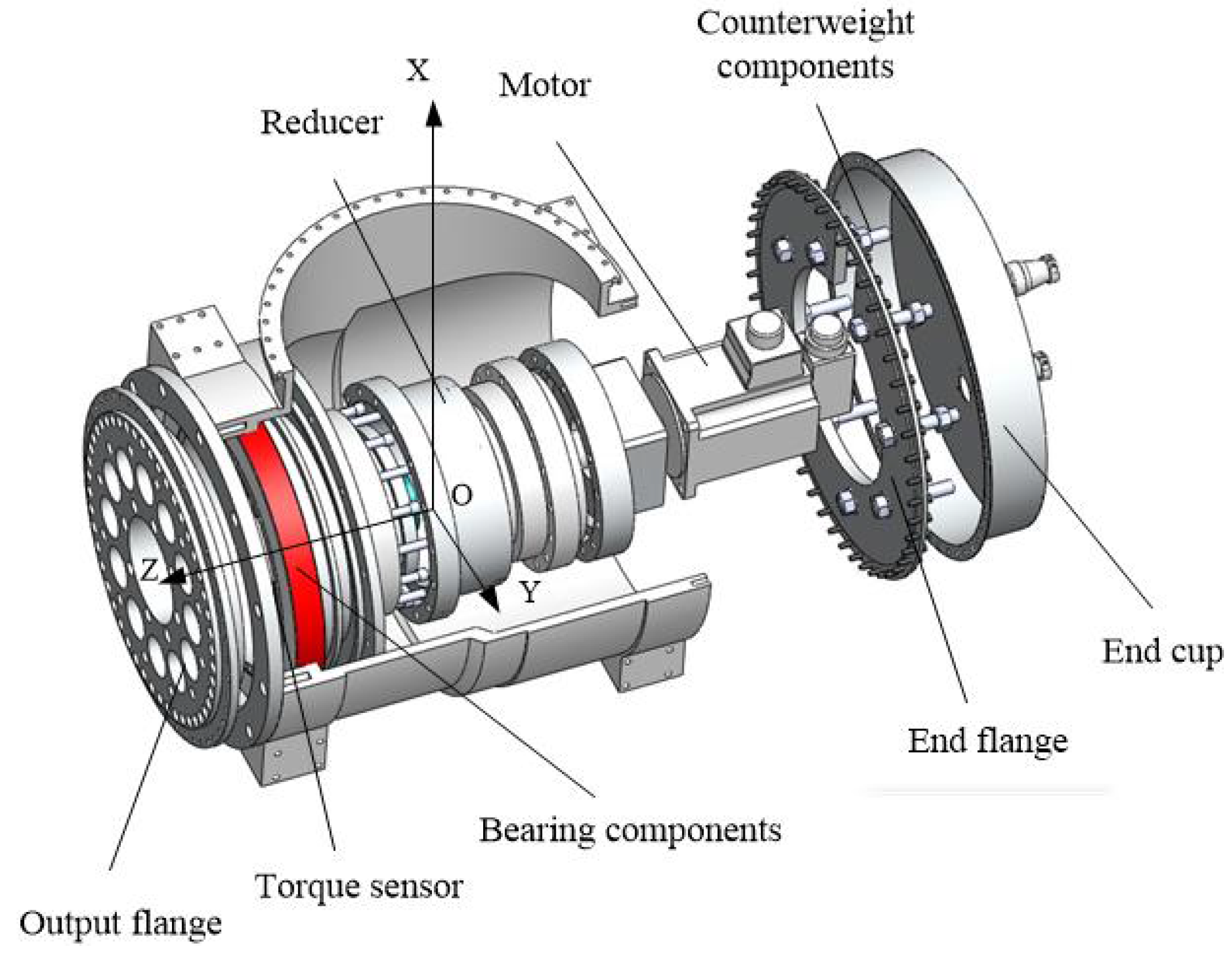
3.1. Modeling of Joints
3.2. Optimization of Mass-Matching
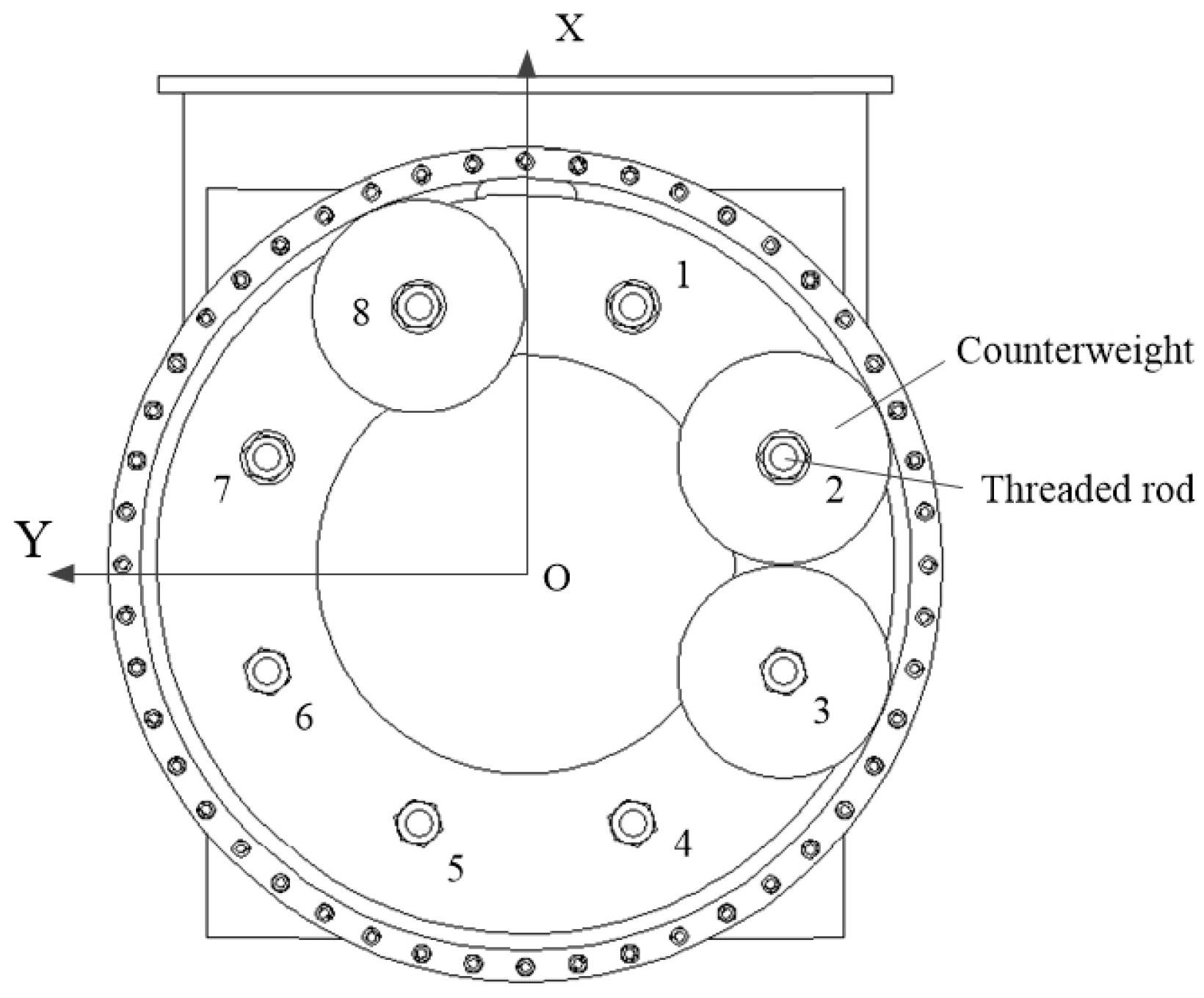
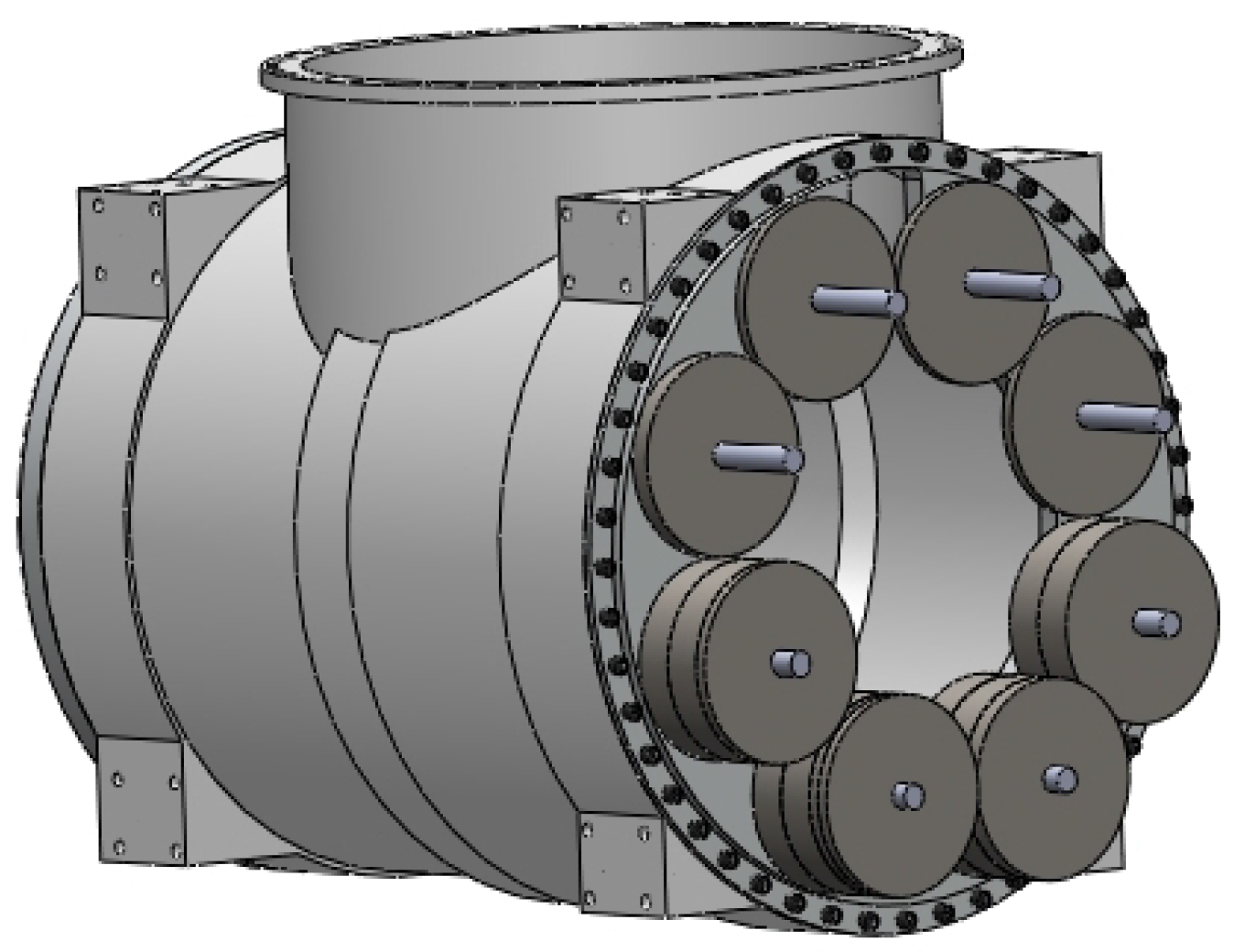
3.2.1. Design of Counterweight Components
3.2.2. Optimization Method
3.2.3. Mass-Matching Results
3.3. Barycenter Affected by Mass Error
3.4. Inertia Matrix of Joint Affected by Counterweight
4. Simulation Study
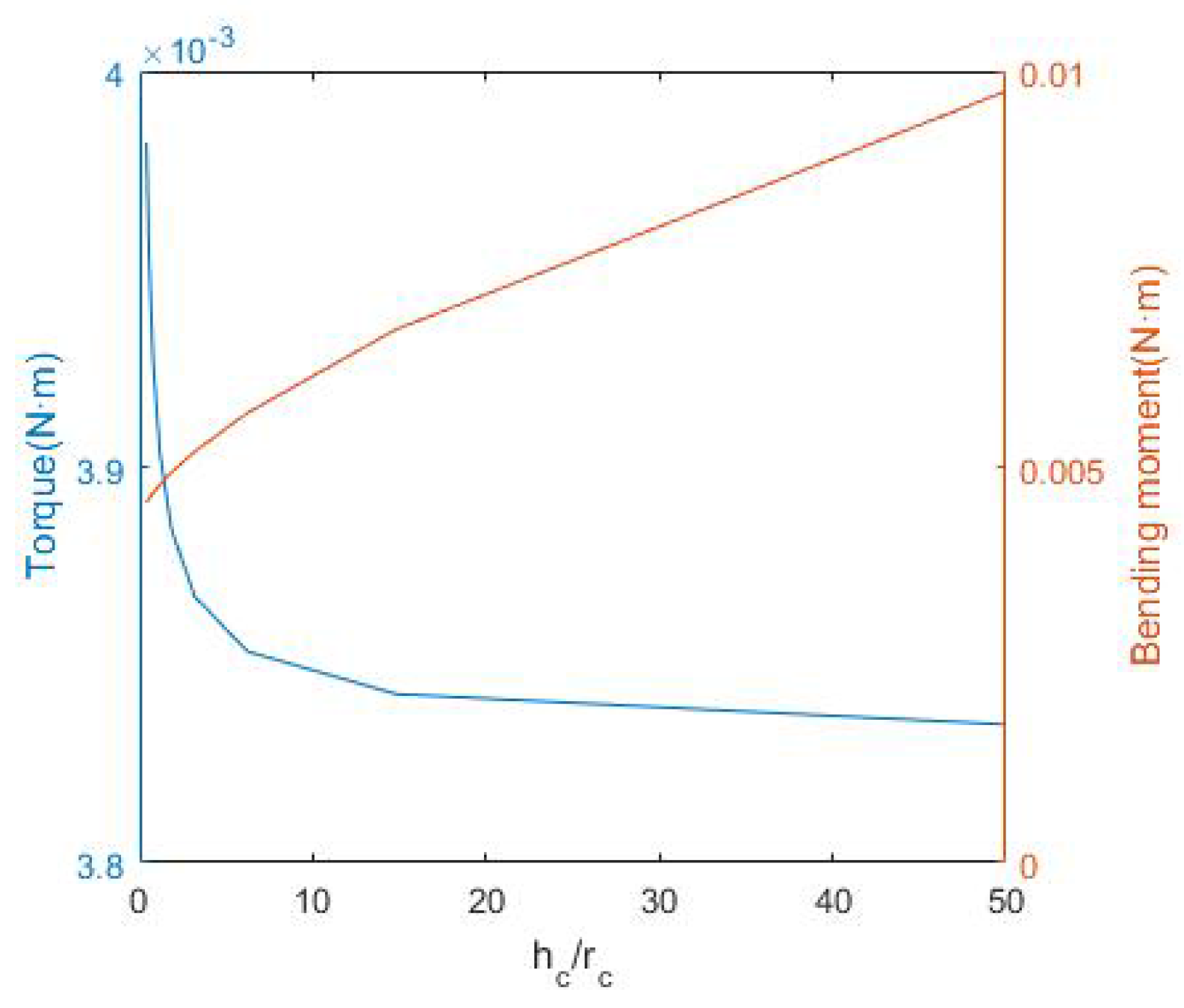
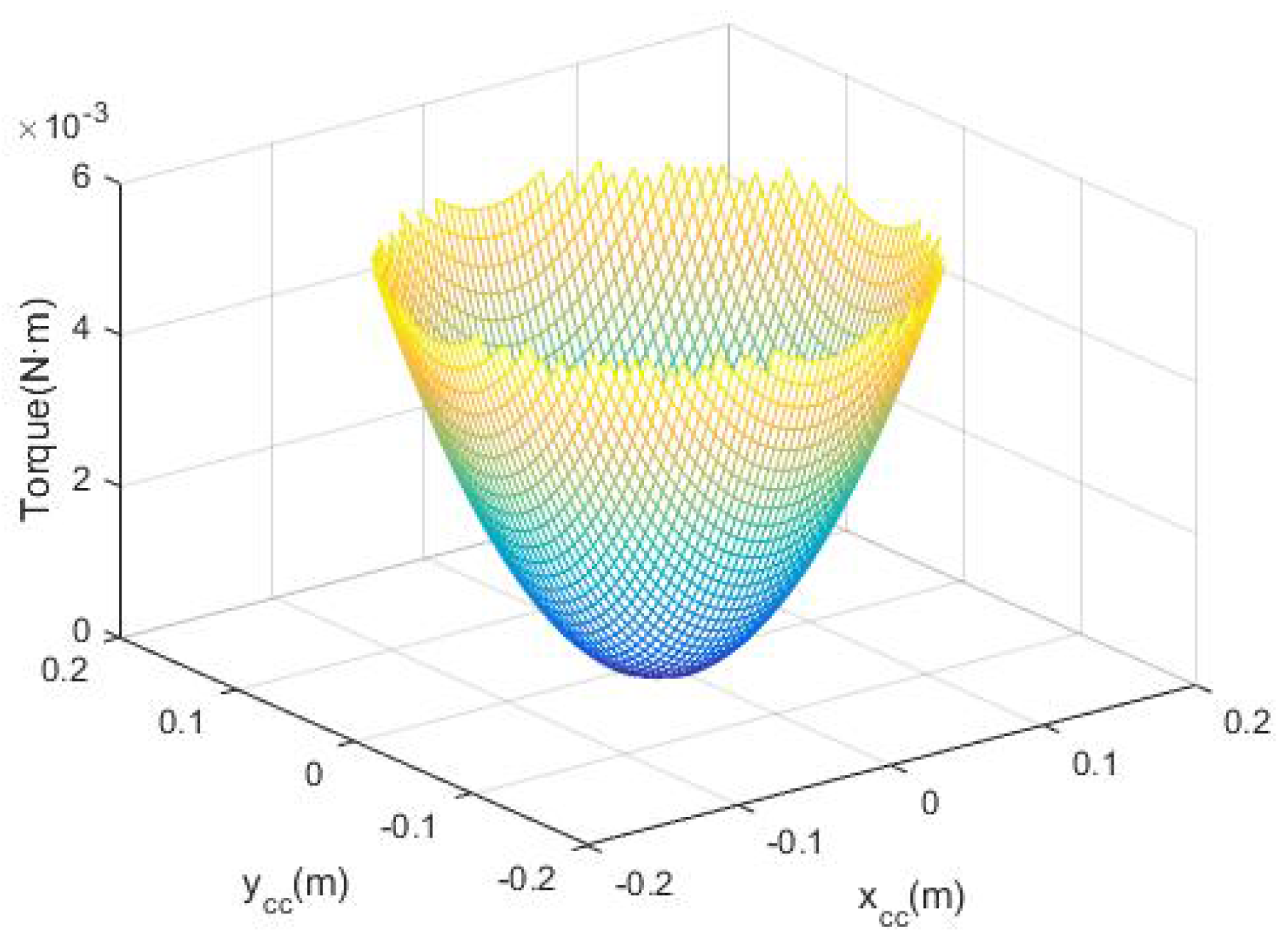
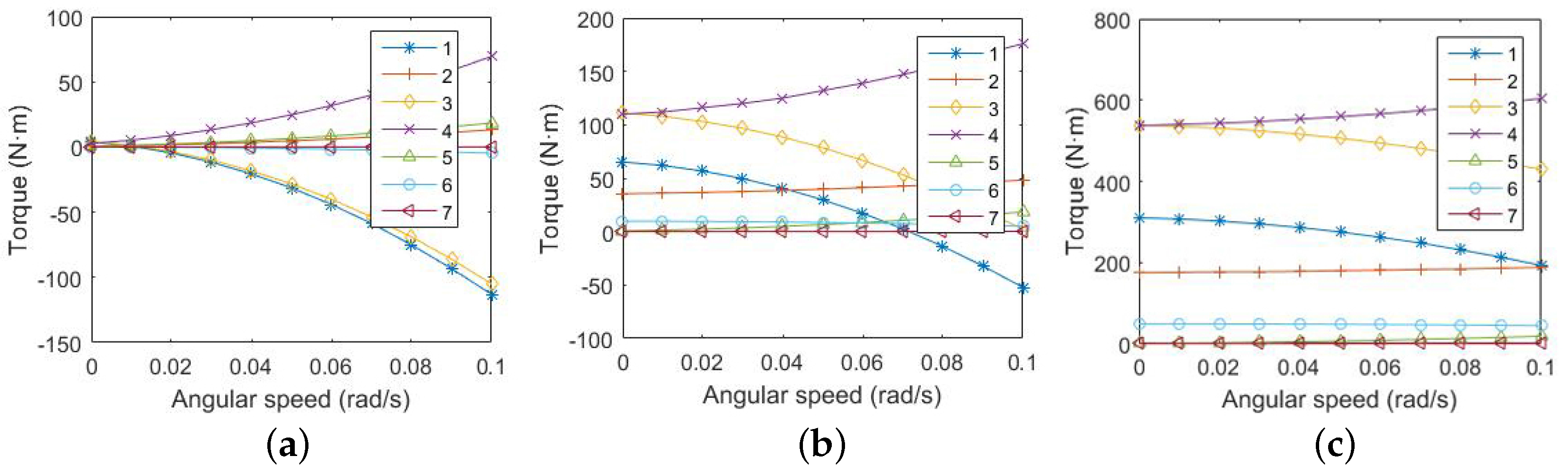
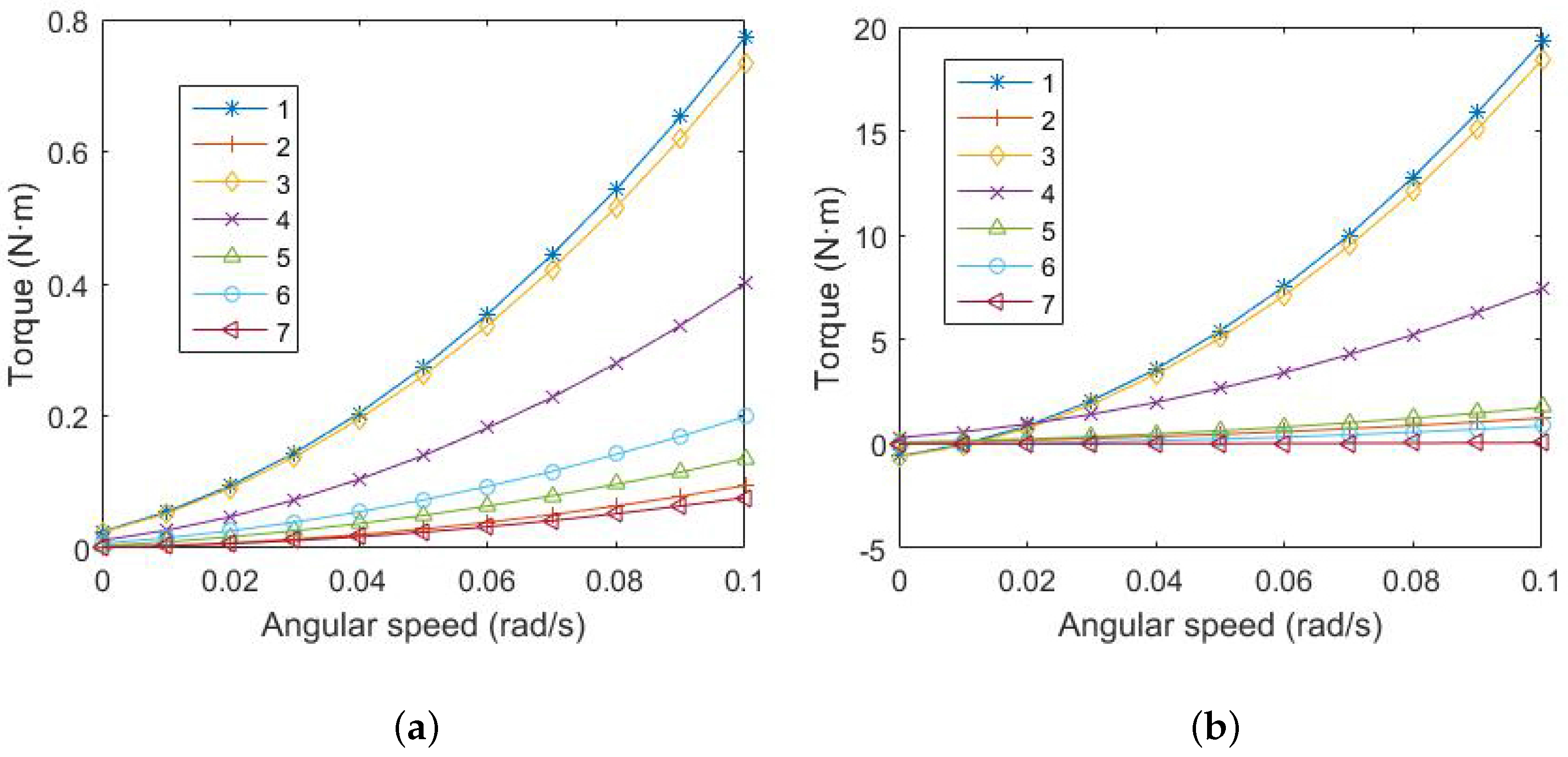
4.1. Torque of Joint Affected by Counterweight
4.2. Joint Torques of Simulated Manipulator
4.3. Equivalence Analysis of Torque
5. Experiment for Optimization Results of Mass-Matching
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yu, D.Y.; Sun, J.; Ma, X.R. Suggestion on Development of Chinese Space Manipulator Technology. Spacecr. Eng. 2007, 16, 1–8. [Google Scholar]
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Belser, V.; Breuninger, J.; Reilly, M.; Laufer, R.; Dropmann, M.; Herdrich, G.; Hyde, T.; Röser, H.-P.; Fasoulas, S. Aerodynamic and engineering design of a 1.5 s high quality microgravity drop tower facility. Acta Astronaut. 2016, 129, 335–344. [Google Scholar] [CrossRef]
- Dan, T.; Flight Global. Zero-G Flying Means High Stress for an Old A310. 2015. Available online: https://www.flightglobal.com/news/articles/zero-g-flying-means-high-stress-for-an-old-a310-410416/ (accessed on 23 March 2015).
- Carignan, C.R.; Akin, D.L. The reaction stabilization of on-orbit robots. Control Syst. IEEE 2000, 20, 19–33. [Google Scholar]
- Sato, N.; Wakabayashi, Y. JEMRMS design features and topics from testing. In Proceedings of the 6th International Symposium on Artificial Intelligence and Robotics & Automation in Space (I-SAIRAS), St-Hubert, QC, Canada, 18–22 June 2001. [Google Scholar]
- Brown, H.B.; Dolan, J.M. A Novel Gravity Compensation System for Space Robots. Available online: http://repository.cmu.edu/cgi/viewcontent.cgi?article=1216&context=robotics (accessed on 5 December 2017).
- Sato, Y.; Ejiri, A.; Iida, Y.; Kanda, S.; Maruyama, T.; Uchiyama, T.; Fujii, H. Micro-G emulation system using constant-tension suspension for a space manipulator. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991. [Google Scholar]
- Liu, Z.; Gao, H.B.; Deng, Z.Q.; Tao, J.G. Gravity compensation for Rocker-bogie Rovers through single string tension. J. Mech. Eng. 2013, 49, 113–124. [Google Scholar] [CrossRef]
- Xiang, S.; Gao, H.; Liu, Z.; Yu, H.; Deng, Z. A novel active suspension gravity compensation system for physically simulating human walking in microgravity. IEEE Int. Conf. Robot. Biomim. 2017, 49, 1052–1057. [Google Scholar]
- Li, Y.Q.; Shao, Z.F.; Tian, S.H.; Tang, X.Q. Analysis and evaluation on unloading ratio of zero-g simulation device of space manipulator based on suspension system. Robot 2016, 38, 293–300. [Google Scholar]
- Kuroda, Y.; Teshima, T.; Satoc, Y.; Kubota, T. Mobility performance evaluation of planetary rover with similarity model experiment. IEEE Int. Conf. Robot. Autom. 2004, 2, 2098–2103. [Google Scholar]
- Yao, Y.S.; Mei, T. Simulation method of space operation on the ground–buoyancy method. Mech. Eng. 2008, 44, 182–188. [Google Scholar] [CrossRef]
- Hou, Y.M.; Ji, L.H.; Zhang, X.Y. Effect and mass-matching optimization of the dynamic balance on satellite attitude. Aerosp. Manuf. Technol. 2002, 3, 25–30. [Google Scholar]
- You, J.; Tian, Z.; Hou, X.Y. Genetic algorithm based optimization of counterweight distribution for reentry vehicle. Spacecr. Eng. 2015, 24, 56–61. [Google Scholar]
- Da Fonseca, I.M.; Goes, L.C.S.; Seito, N.; da Silva Duarte, M.K.; de Oliveir, É.J. Attitude dynamics and control of a spacecraft like a robotic manipulator when implementing on-orbit servicing. Acta Astronaut. 2017, 137, 490–497. [Google Scholar] [CrossRef]
- Alepuz, J.P.; Emami, M.R.; Pomares, J. Direct image-based visual servoing of free-floating space manipulators. Aerosp. Sci. Technol. 2016, 55, 1–9. [Google Scholar] [CrossRef]
- Masuya, K.; Sugihara, T. Com motion estimation of a biped robot based on kinodynamics and torque equilibrium. Adv. Robot. 2016, 10, 1–13. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulated Manipulator | Explanation of Index |
|---|---|
| Mechanical structure | Structures and sizes match those of the actual space manipulator; |
| Drive mode | DOF and drive mode match those of the actual space manipulator. All joints are interchangeable; |
| Motion | Rotation range <, Rotation speed </s; |
| Mass | Barycenter deviation <5 mm, Gravity deviation <1%; |
| Torque | Torque deviation <50 N·m; Allowable torque of the actual space manipulator is <500 N·m; |
| Torque deviation of the simulated manipulator should not exceed 10%. |
| Symbol | Parameter |
|---|---|
| Linear velocity of point | |
| Angular velocity of link i | |
| Linear acceleration of point | |
| Angular acceleration of link i | |
| Linear acceleration of barycenter of link i | |
| Unit vector pointing along axis | |
| Position velocity of point with respect to point | |
| Position velocity of barycenter of link i with respect to point | |
| Resulting force exerted on link i by link at point | |
| Resulting torque exerted on link i by link at point | |
| Inertia force exerted at barycenter of link i | |
| Inertia torque exerted at barycenter of link i |
| Label | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Number | ||||||||||
| Mass (1 kg) | ||||||||||
| 1 | 2 | 2 | 2 | 2 | ||||||
| 0.5 | 1 | 1 | ||||||||
| 0.3 | 1 | 1 | 2 | 1 | 1 | |||||
| Actual Space Manipulator Joint | Simulated Manipulator Joint after Mass-Matching | |
|---|---|---|
| Mass (kg) | 67.5 | 67.5 |
| Barycenter (mm) |
| Label | 1 | 2 | 3 | 4 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|
| mass (kg) | 15.5 | 15.7 | 15.9 | 15.4 | 15.8 | 15.7 | 16.0 |
| Label | Mass (kg) | Mass Diviation (kg) | x (mm) | x (mm) | y (mm) | y (mm) | z (mm) | z (mm) |
|---|---|---|---|---|---|---|---|---|
| 1 | 67.70 | 0.20 | 1.20 | 0.50 | 4.40 | 1.90 | 30.43 | −2.03 |
| 2 | 67.80 | 0.30 | 0.10 | −0.60 | 4.87 | 1.43 | 31.95 | −3.55 |
| 3 | 67.59 | 0.09 | 0.97 | 0.27 | 2.95 | 3.35 | 32.65 | −4.25 |
| 4 | 67.50 | 0.00 | −0.06 | −0.76 | 4.46 | 1.84 | 30.33 | −1.93 |
| 5 | 67.66 | 0.16 | −1.60 | −2.30 | 4.31 | 1.99 | 31.52 | −3.12 |
| 6 | 67.68 | 0.18 | 0.20 | −0.50 | 3.04 | 3.26 | 31.03 | −2.63 |
| 7 | 67.65 | 0.15 | 1.80 | 1.10 | 1.90 | 4.40 | 31.45 | −3.05 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, S.; Tang, X.; Xiang, C. Equivalence Analysis of Mass and Inertia for Simulated Space Manipulator Based on Constant Mass. Machines 2017, 5, 31. https://doi.org/10.3390/machines5040031
Tian S, Tang X, Xiang C. Equivalence Analysis of Mass and Inertia for Simulated Space Manipulator Based on Constant Mass. Machines. 2017; 5(4):31. https://doi.org/10.3390/machines5040031
Chicago/Turabian StyleTian, Sihui, Xiaoqiang Tang, and Chengyuan Xiang. 2017. "Equivalence Analysis of Mass and Inertia for Simulated Space Manipulator Based on Constant Mass" Machines 5, no. 4: 31. https://doi.org/10.3390/machines5040031
APA StyleTian, S., Tang, X., & Xiang, C. (2017). Equivalence Analysis of Mass and Inertia for Simulated Space Manipulator Based on Constant Mass. Machines, 5(4), 31. https://doi.org/10.3390/machines5040031