
A Fuzzy Drive Strategy for an Intelligent Vehicle Controller Unit Integrated with Connected Data

Abstract
:1. Introduction
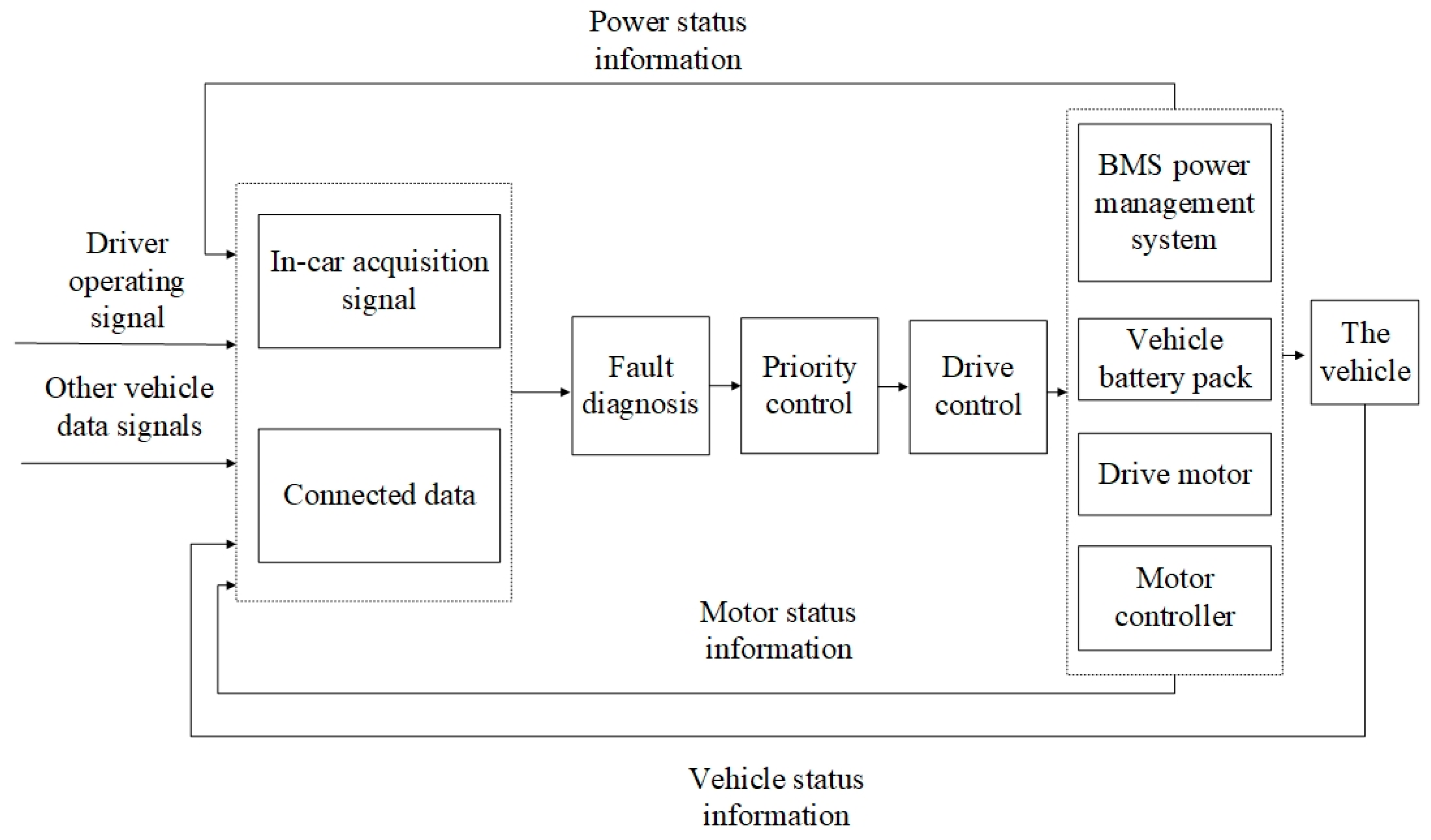
2. VCU Control Strategy Framework
3. Design of the Fuzzy Drive Control Strategy
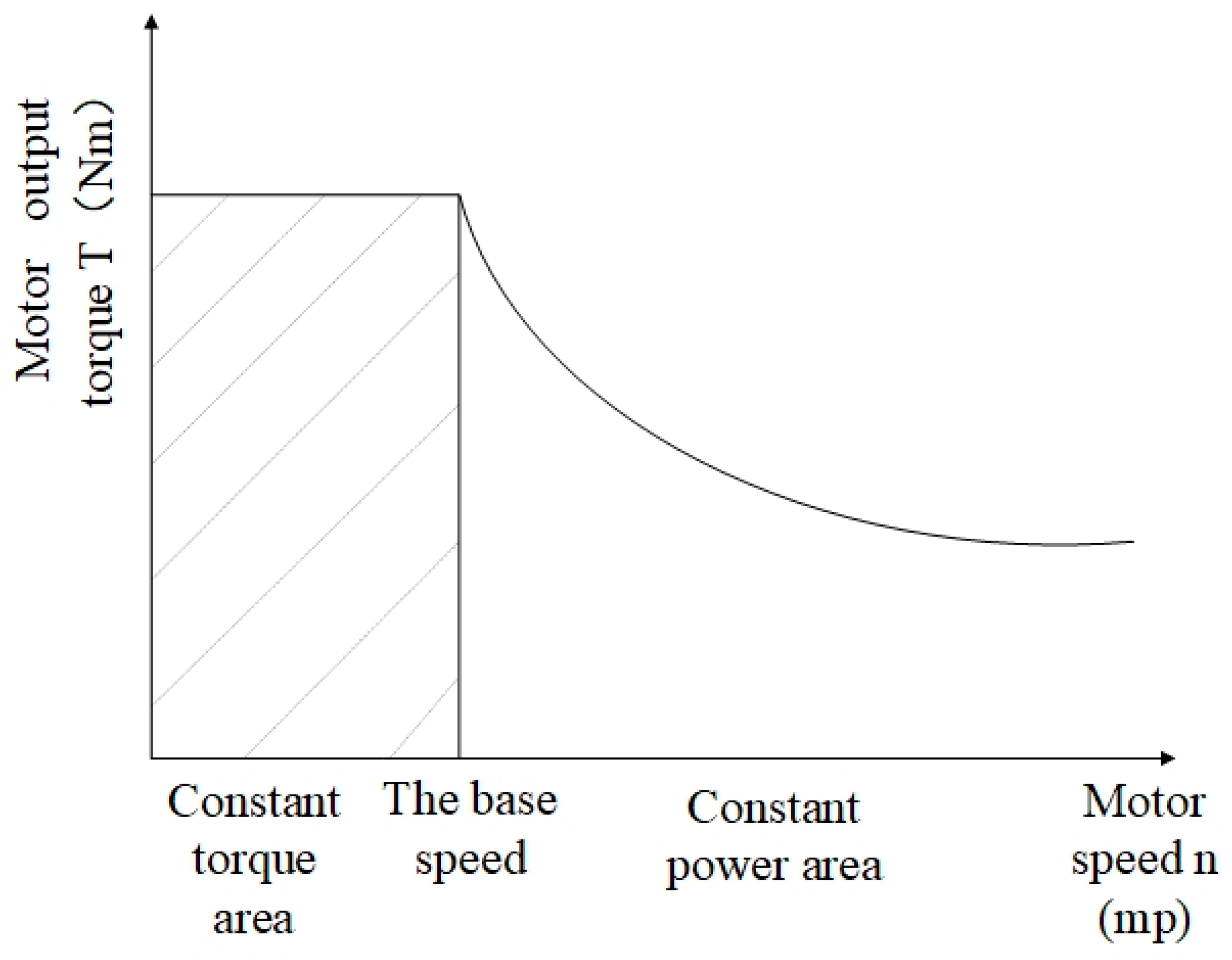
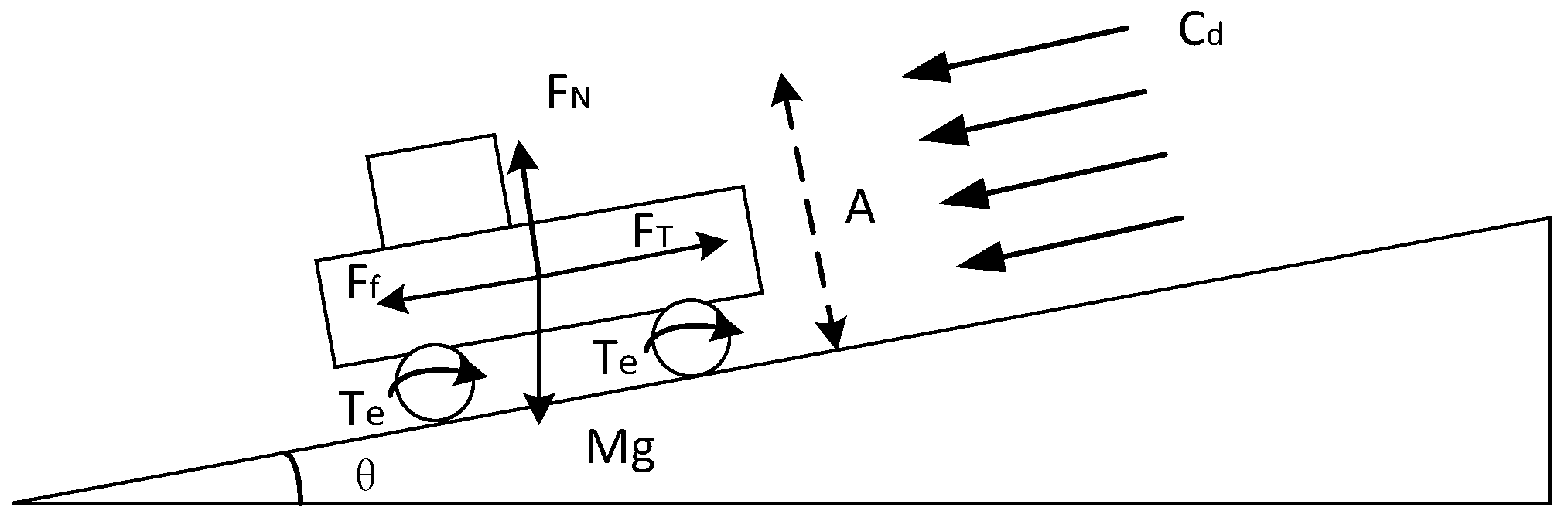
3.1. Vehicle Drive Control Torque Model
3.2. Fuzzy Drive Control Strategy
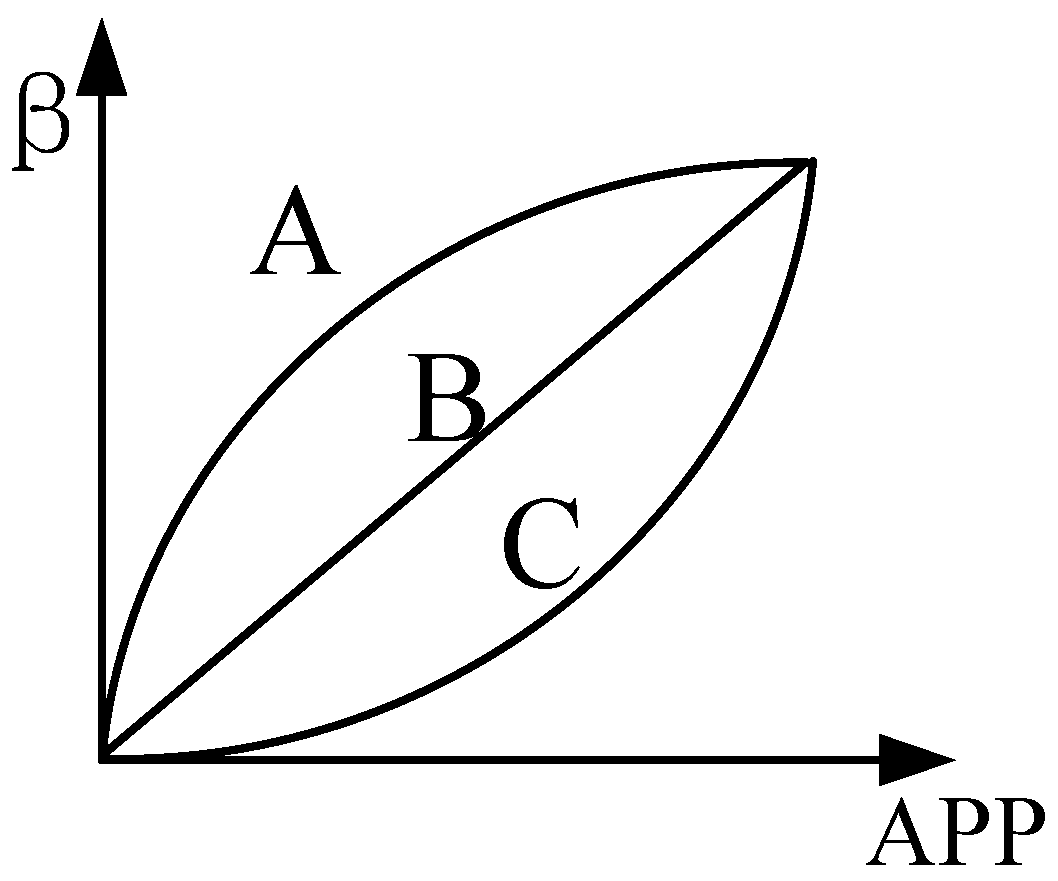
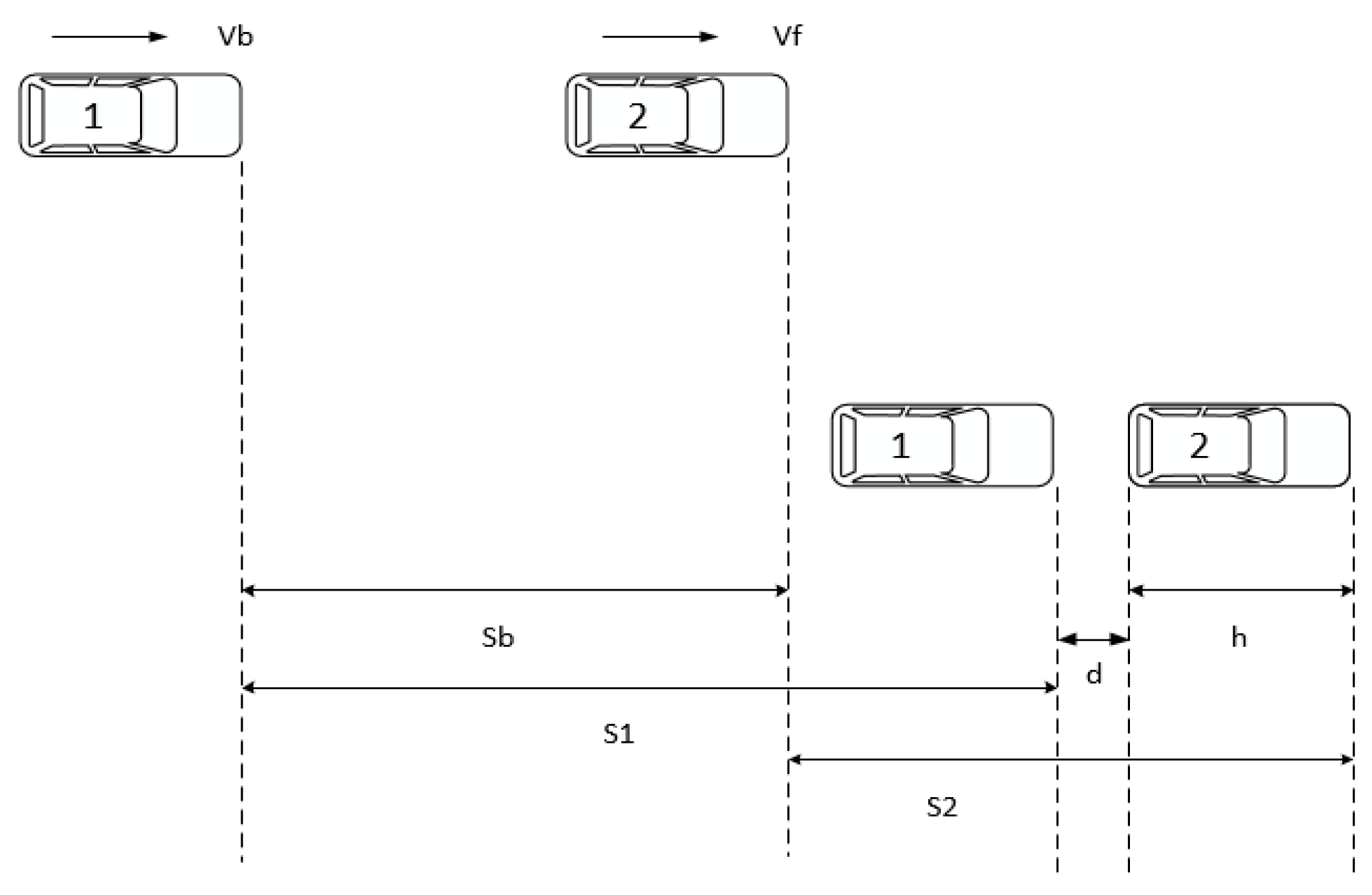
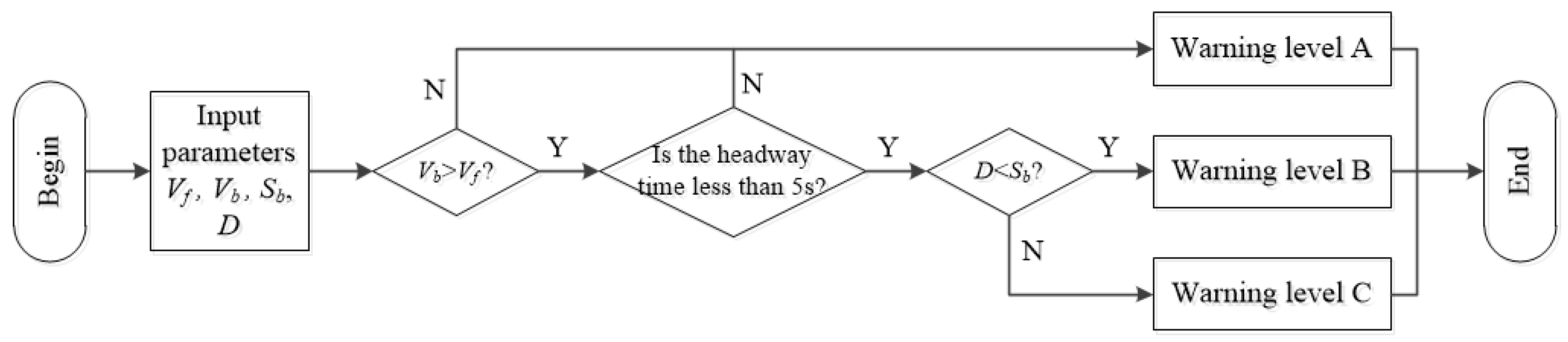
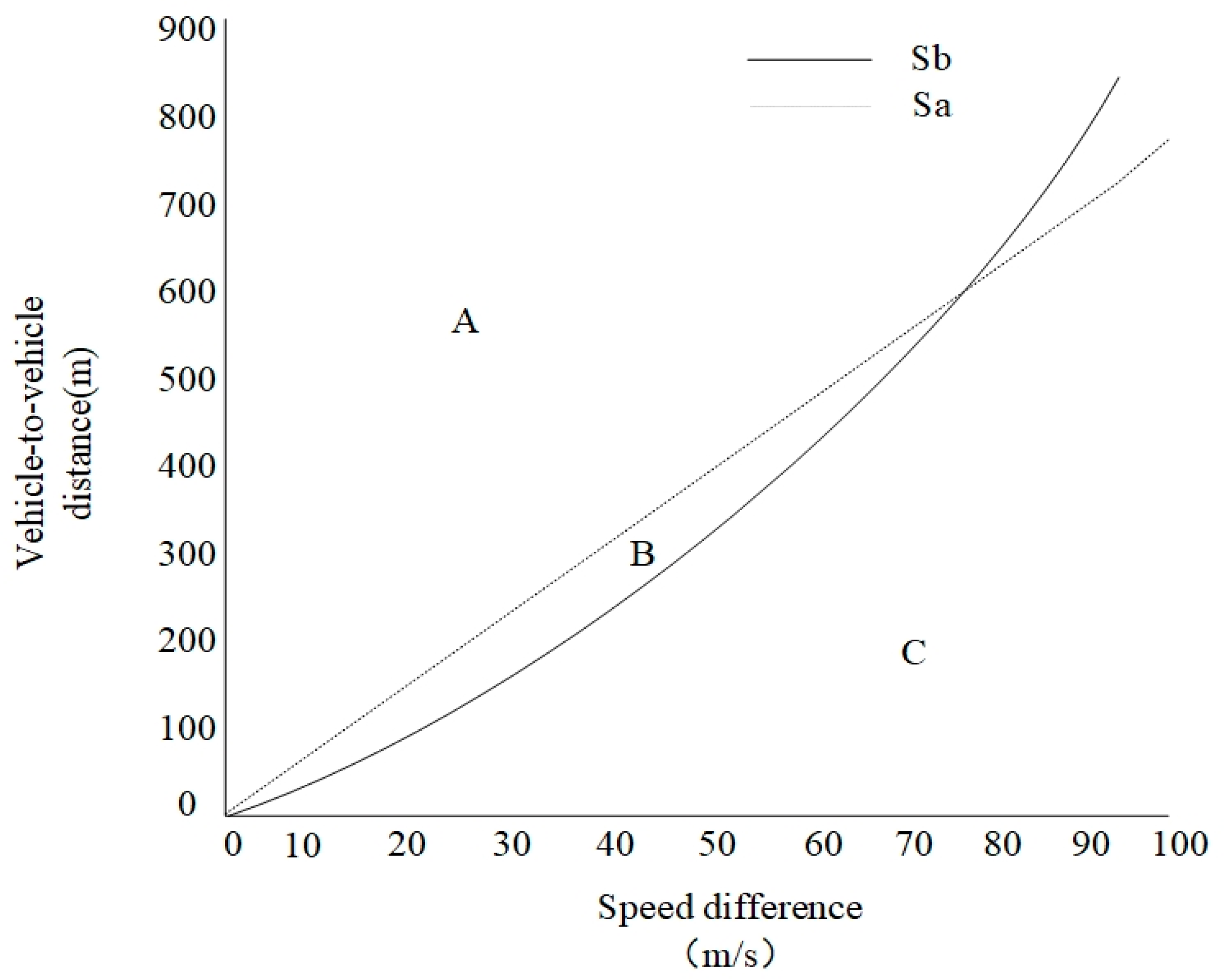
3.2.1. Early Warning Level Model
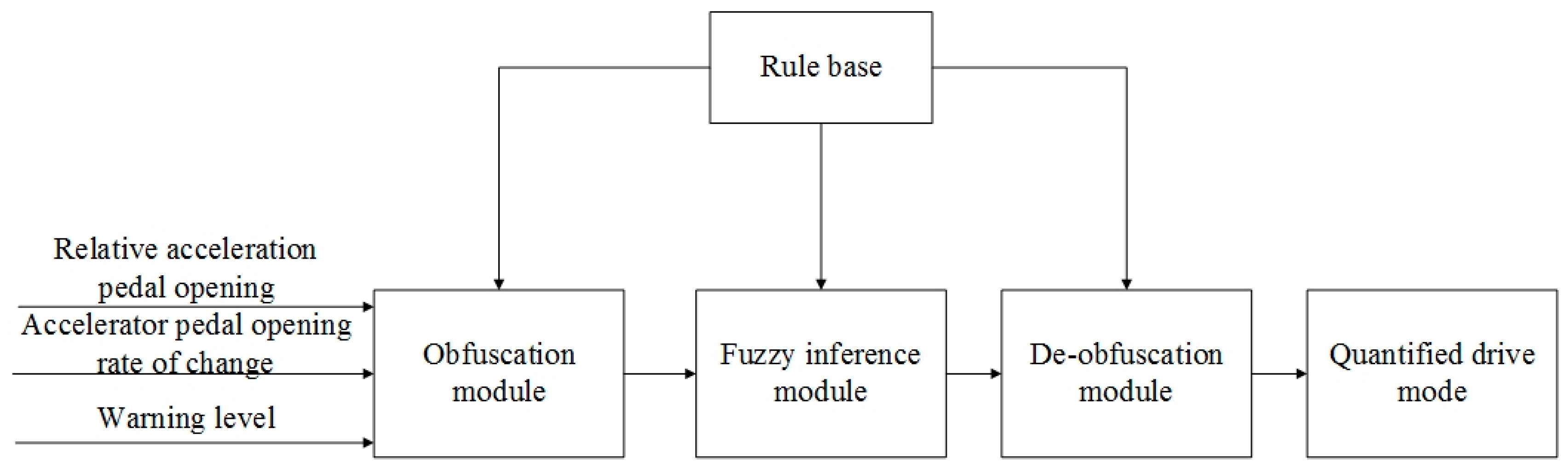
3.2.2. Drive Pattern Recognition
- (1)
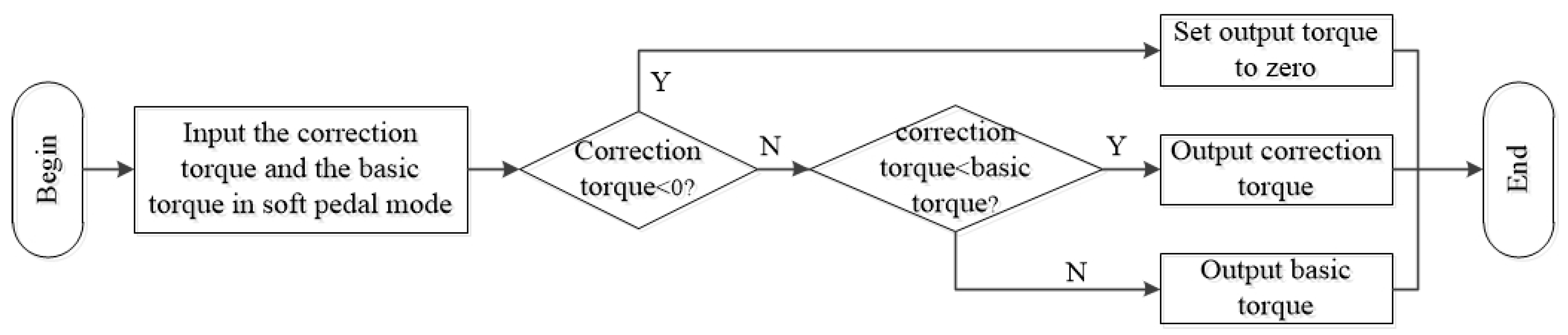
- Soft pedal drive mode
- (2)
- Linear pedal drive mode
- (3)
- Hard pedal drive mode
4. Experimental Results and Analysis
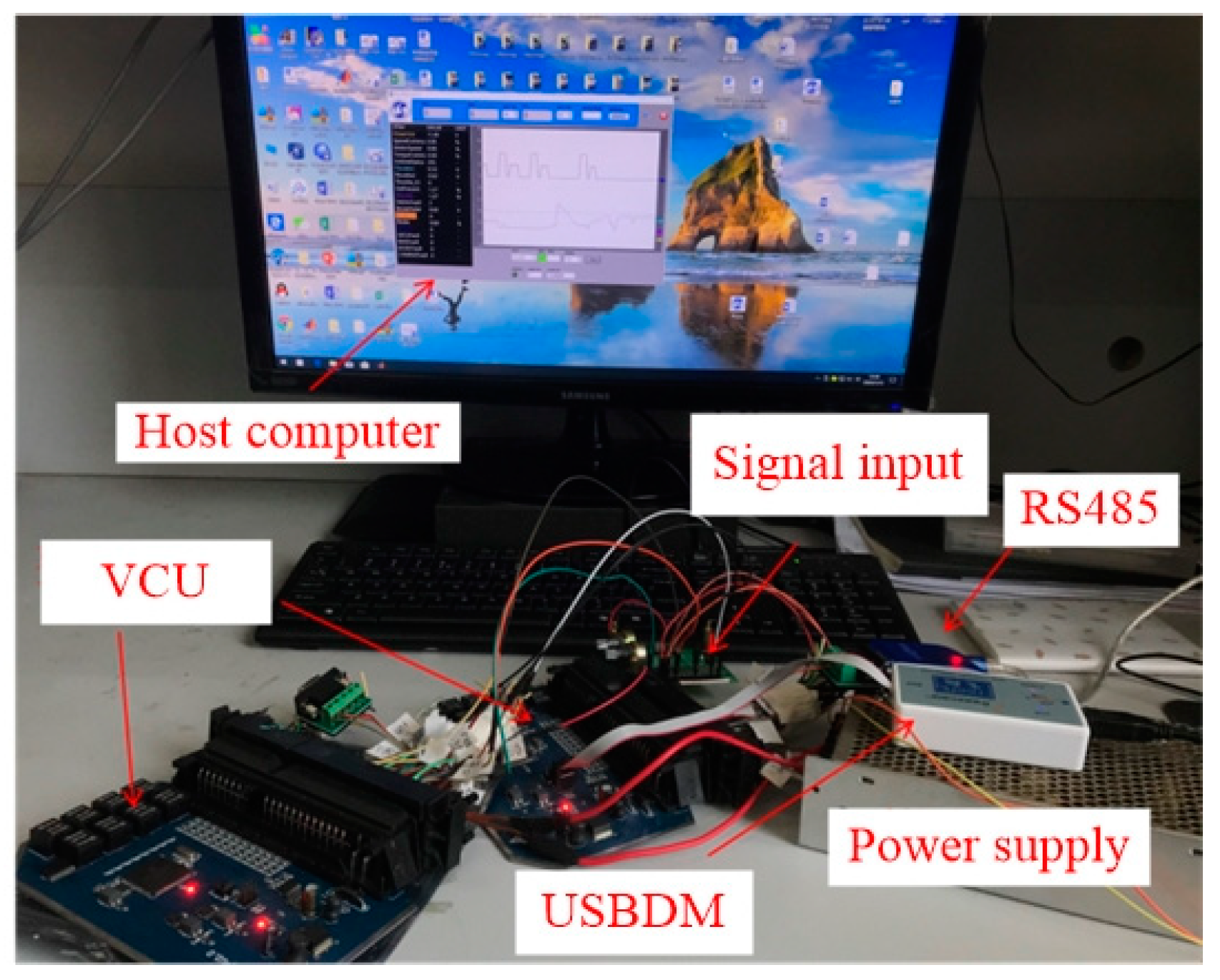
4.1. Test Environment
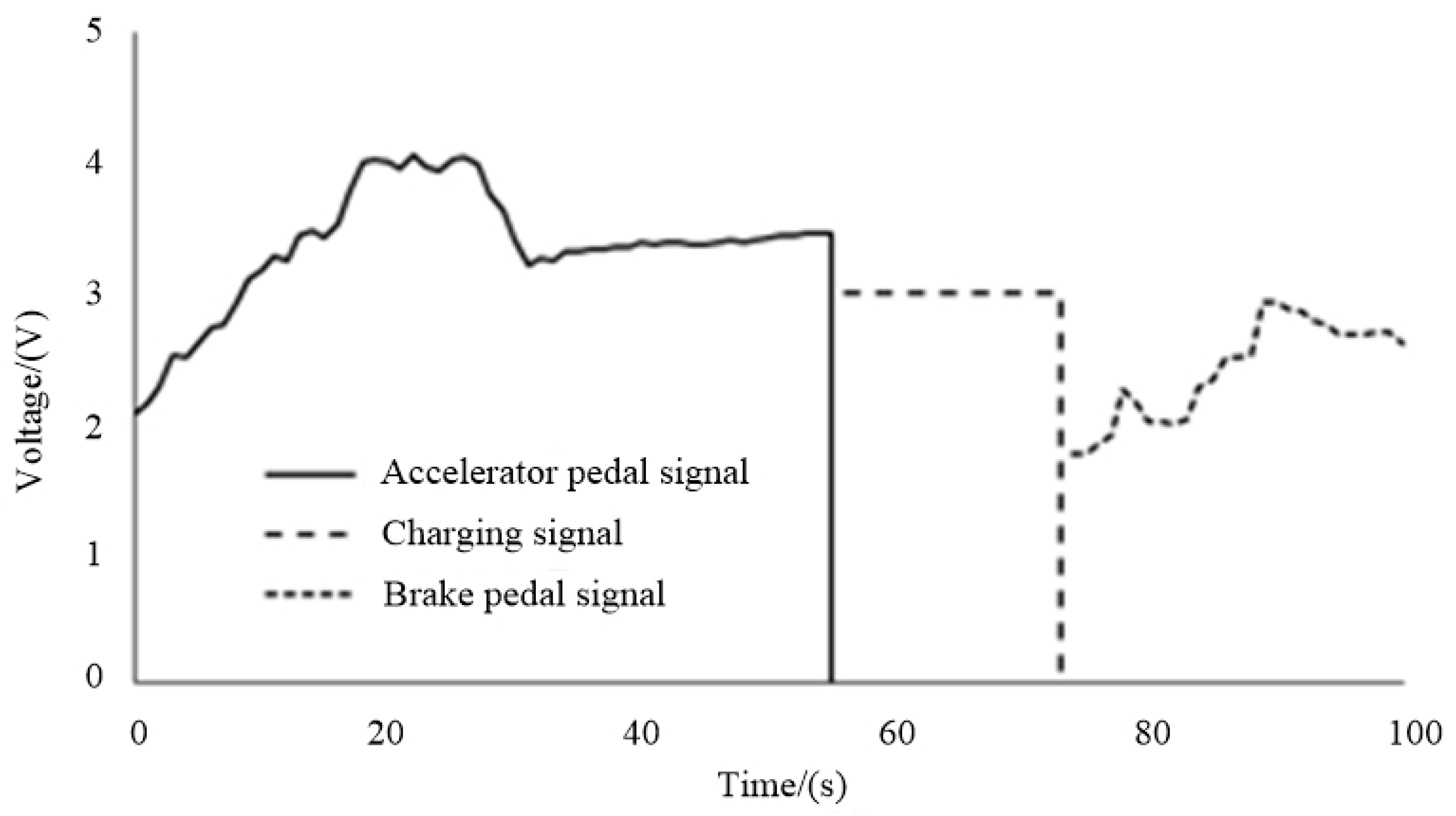
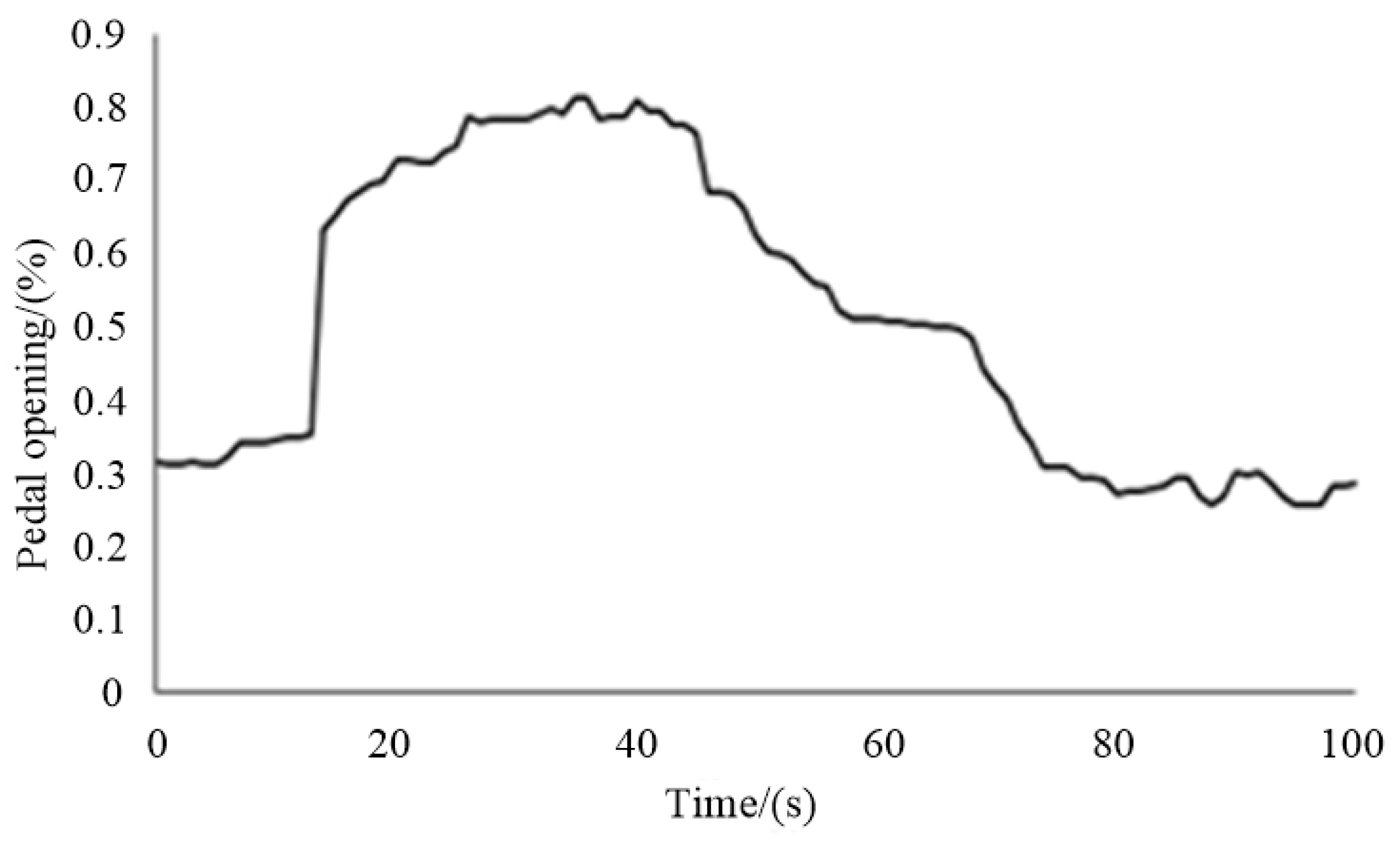
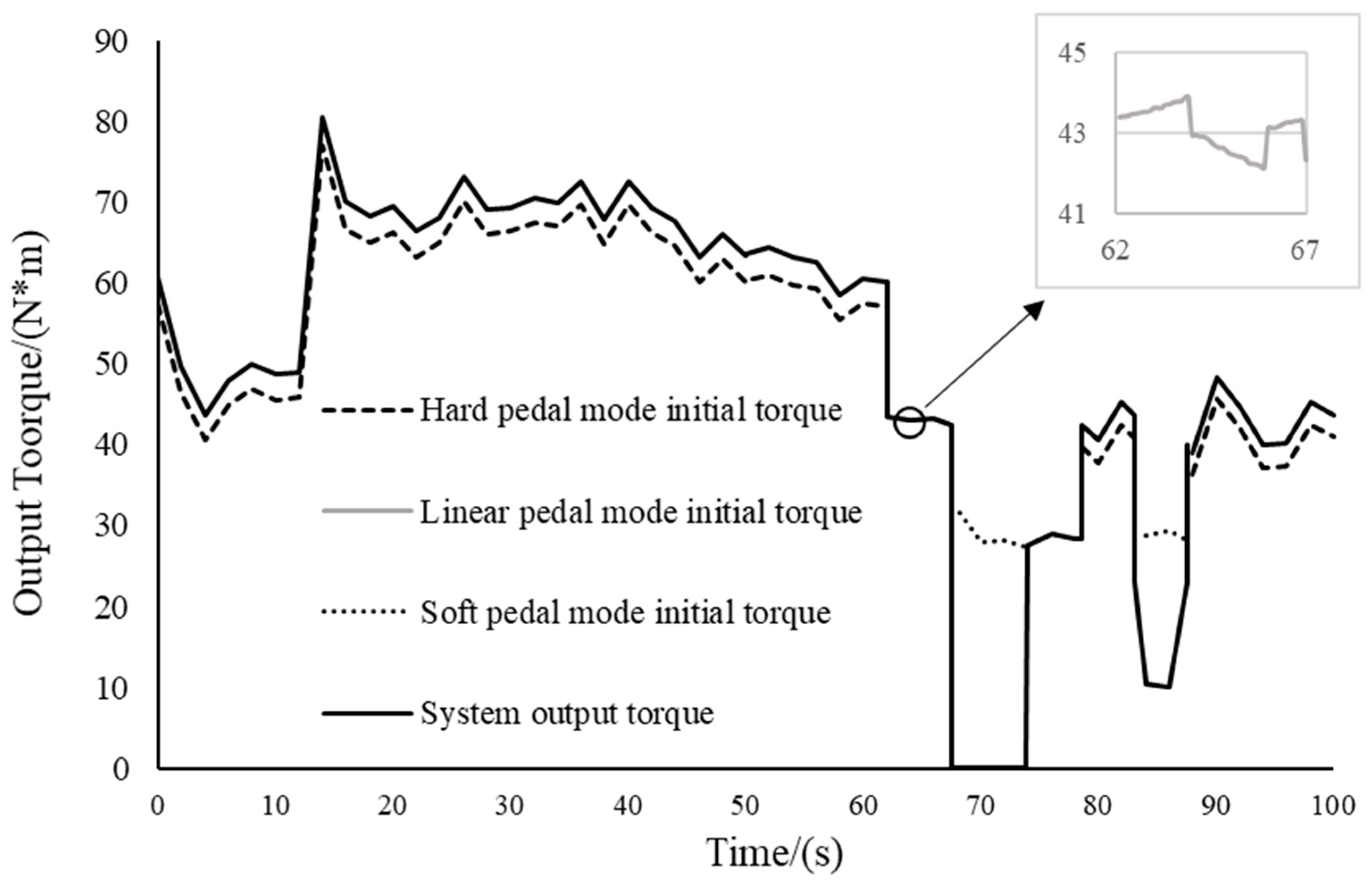
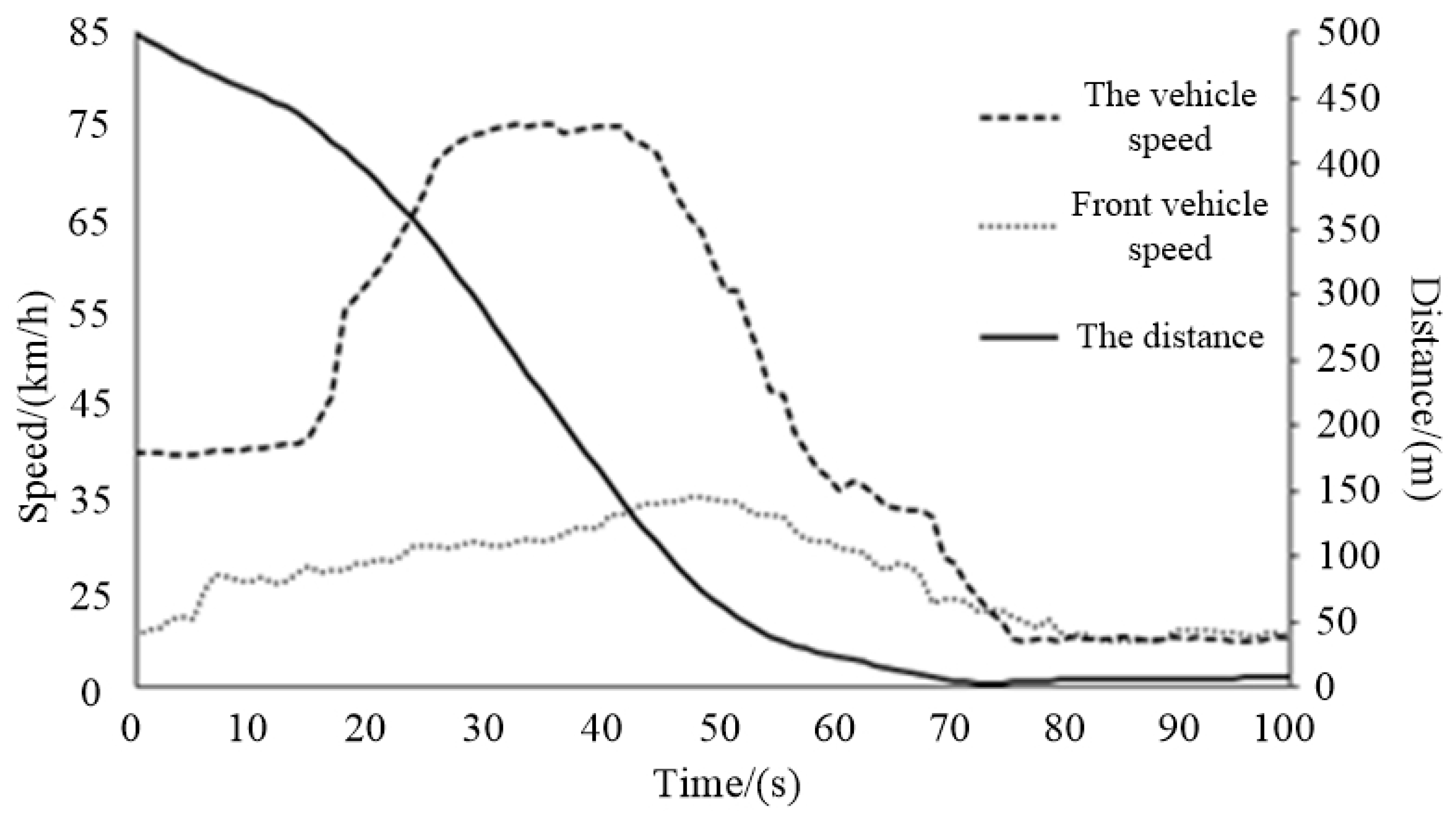
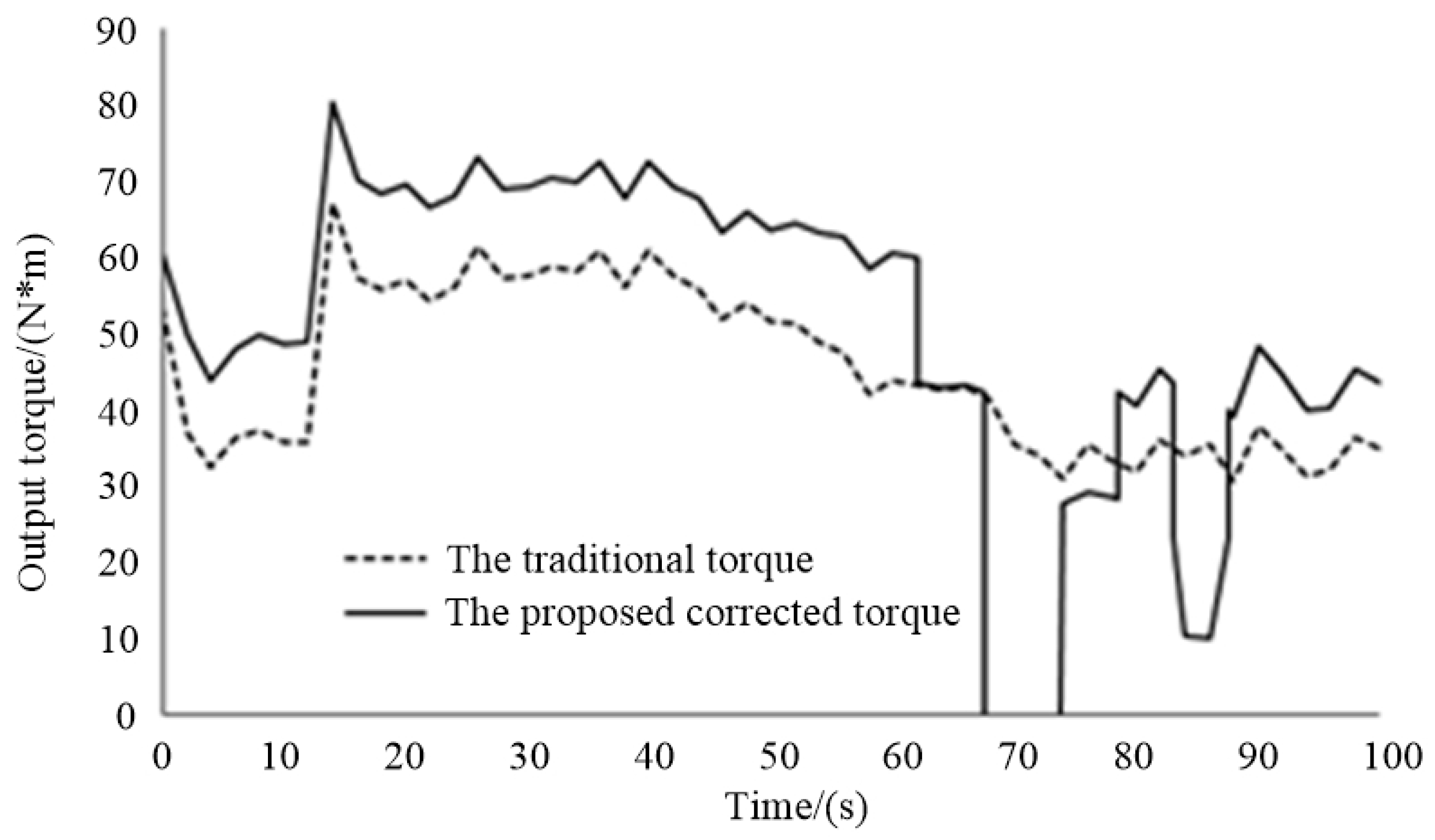
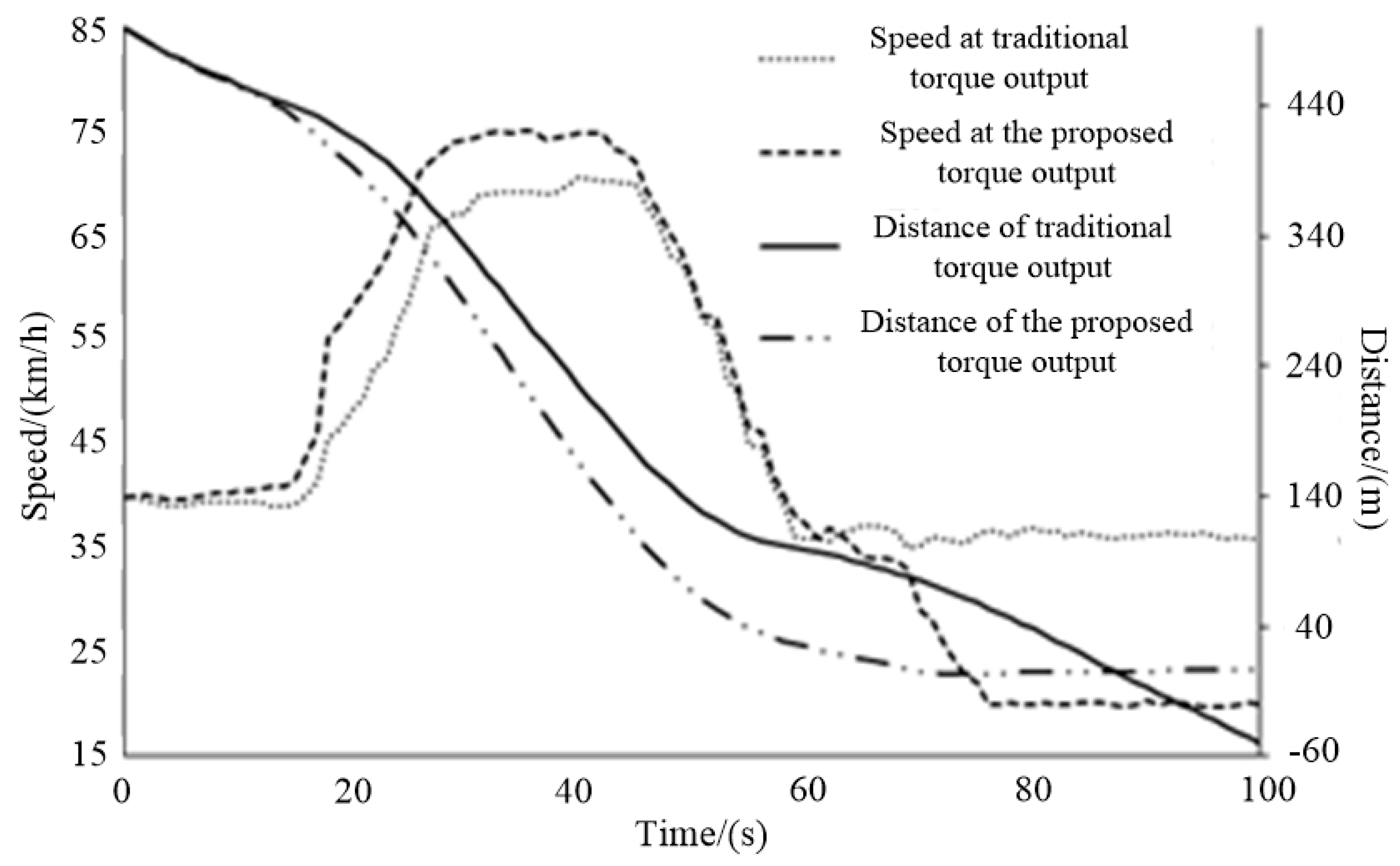
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qiu, L.H.; Qian, L.J.; Zomorodi, H.; Pisu, P. Design and optimization of equivalent consumption minimization strategy for 4WD hybrid electric Vehicles incorporating vehicle connectivity. Sci. China Technol. Sci. 2018, 61, 147–157. [Google Scholar] [CrossRef]
- Bin, R.A.N.; Huachun, T.A.N.; Jian, Z.H.A.N.G.; Xu, Q.U. Development status and trend of connected automated vehicle highway system. J. Automot. Saf. Energy 2018, 9, 119–130. [Google Scholar]
- Keqiang, L.I.; Yifan, D.A.I.; Shengbo, L.I.; Mingyuan, B.I.A.N. State-of-the-art and technical trends of intelligent and connected vehicles. J. Automot. Saf. Energy 2017, 8, 1–14. [Google Scholar]
- China Journal of Highway and Transport. Review on China’s Automotive Engineering Research Progress: 2017. China J. Highw. Transp. 2017, 30, 1–197. [Google Scholar]
- Pei, H.L.; Xie, Y.B.; Wang, W.M.; Li, M.Z.; Sheng, W. Design and Development of Platform for Electric Vehicle Control Unit. High Power Convert. Technol. 2012, 2, 35–38. [Google Scholar]
- Zulkefli MA, M.; Mukherjee, P.; Sun, Z.; Zheng, J.; Liu, H.X.; Huang, P. Hardware-in-the-loop testbed for evaluating connected vehicle applications. Transp. Res. Pan C Emerg. Technol. 2017, 78, 50–62. [Google Scholar] [CrossRef]
- Pérez Fernández, J.; Alcázar Vargas, M.; Velasco García, J.M.; Cabrera Carrillo, J.A.; Castillo Aguilar, J.J. Low-Cost FPGA-Based Electronic Control Unit for Vehicle Control Systems. Sensors 2019, 19, 1834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sajith, A.H.; Babu, S.N.; Kumar, V.; Prakash, R. Optimisation of an Electric Drive Train for ‘On Road’ Electric Vehicle. SAE Tech. Pap. 2009. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, L.; Ehsani, M. Investigation of the Effectiveness of Regenerative Braking for EV and HEV. SAE Trans. 1999, 108, 3184–3190. [Google Scholar] [CrossRef]
- Gao, Y.; Ehsani, M. Electronic Braking System of EV and HEV—Integration of Regenerative Braking, Automatic Braking Force Control and ABS. SAE Trans. 2001, 110, 576–582. [Google Scholar] [CrossRef]
- So, J.J.; Kang, J.; Park, S.; Park, I.; Lee, J. Automated Emergency Vehicle Control Strategy Based on Automated Driving Controls. J. Adv. Transp. 2020, 2020, 3867921. [Google Scholar] [CrossRef]
- Zhang, Y.; Zeng, T.; Zhang, Y.; Ai, Z.; Feng, Y. Model adaptive torque control and distribution with error reconstruction strategy for RWID EVs. IET Intell. Transp. Syst. 2020, 14, 382–391. [Google Scholar] [CrossRef]
- Masjosthusmann, C.; Köhler, U.; Decius, N.; Büker, U. A vehicle energy management system for a battery electric vehicle. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012; pp. 339–344. [Google Scholar]
- Hao, L.; Sun, B.H.; Li, G.; Guo, L. The Eco-Driving Considering Coordinated Control Strategy for the Intelligent Electric Vehicles. IEEE Access 2021, 9, 10686–10698. [Google Scholar] [CrossRef]
- Fu, J.T.; Fu, Z.M.; Song, S.Z. Model predictive control-based control strategy to reduce driving-mode switching times for parallel hybrid electric vehicle. Trans. Inst. Meas. Control 2021, 43, 167–177. [Google Scholar] [CrossRef]
- Qi, W.Q. Fuzzy control strategy of pure electric vehicle based on driving intention recognition. J. Intell. Fuzzy Syst. 2020, 39, 5131–5139. [Google Scholar] [CrossRef]
- Guo, N.; Zhang, X.; Zou, Y.; Lenzo, B.; Du, G.; Zhanga, T. A Supervisory Control Strategy of Distributed Drive Electric Vehicles for Coordinating Handling, Lateral Stability, and Energy Efficiency. IEEE Trans. Transp. Electrif. 2021. [Google Scholar] [CrossRef]
- Wang, S.Y.; Lin, X.K. Eco-driving control of connected and automated hybrid vehicles in mixed driving scenarios. Appl. Energy 2020, 271, 115233. [Google Scholar] [CrossRef]
- Li, M.; Wu, X.; He, X.; Yu, G.; Wang, Y. An eco-driving system for electric vehicles with signal control under V2X environment. Transp. Res. Part C 2018, 93, 335–350. [Google Scholar] [CrossRef]
- Ma, F.W.; Yang, Y.; Wang, J.W.; Liu, Z.; Li, J.; Nie, J.; Wu, L. Predictive energy-saving optimization based on nonlinear model predictive control for cooperative connected vehicles platoon with V2V communication. Energy 2019, 189, 116120. [Google Scholar] [CrossRef]
- Zhang, B.; Xu, F.; Zhang, J.; Shen, T. Real-time control algorithm for minimising energy consumption in parallel hybrid electric vehicles. Iet Electr. Syst. Transp. 2020, 10, 331–340. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, T.; Zou, Y.; Du, G.; Guo, N. Predictive Eco-Driving Application Considering Real-World Traffic Flow. IEEE Access 2020, 8, 82187–82200. [Google Scholar] [CrossRef]
- Lu, Y.; Xu, X.; Ding, C.; Lu, G. A Speed Control Method at Successive Signalized Intersections under Connected Vehicles Environment. IEEE Intell. Transp. Syst. Mag. 2019, 11, 117–128. [Google Scholar] [CrossRef]
- National Research Council. Highway Capacity Manual; Transportation Research Board: Washington, DC, USA, 2000. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Warning Level | The Rate of Change of Accelerator Pedal Opening dAPP | Accelerator Pedal Opening APP | |||||
|---|---|---|---|---|---|---|---|
| Z | PVS | PS | PM | PB | PVB | ||
| A | NB | C1 | C1 | C2 | C3 | C4 | C5 |
| NM | C1 | C1 | C2 | C3 | C4 | C5 | |
| NS | C2 | C2 | C2 | C4 | C5 | C6 | |
| PS | C3 | C3 | C4 | C5 | C6 | C7 | |
| PM | C4 | C4 | C5 | C6 | C7 | C8 | |
| PB | C5 | C5 | C6 | C7 | C8 | C9 | |
| B | NB | C1 | C1 | C1 | C2 | C3 | C4 |
| NM | C1 | C1 | C1 | C2 | C4 | C4 | |
| NS | C1 | C1 | C1 | C2 | C4 | C5 | |
| PS | C2 | C2 | C2 | C3 | C5 | C6 | |
| PM | C3 | C4 | C4 | C5 | C6 | C7 | |
| PB | C4 | C4 | C5 | C6 | C7 | C7 | |
| C | NB | C1 | C1 | C1 | C1 | C2 | C3 |
| NM | C1 | C1 | C1 | C1 | C2 | C3 | |
| NS | C1 | C1 | C1 | C1 | C2 | C3 | |
| PS | C1 | C1 | C1 | C1 | C3 | C4 | |
| PM | C2 | C2 | C2 | C3 | C4 | C4 | |
| PB | C3 | C3 | C3 | C4 | C4 | C4 | |
| Throttle Opening Rate of Change dAPP | Speed Difference dv | ||||
|---|---|---|---|---|---|
| HB | B | M | S | HS | |
| Z | Z | Z | Z | Z | Z |
| HS | S | S | S | Z | Z |
| S | S | S | S | Z | Z |
| M | M | M | M | S | S |
| B | B | B | M | M | M |
| HB | B | B | B | M | M |
| Parameter Category | Parameter | Value | Unit |
|---|---|---|---|
| vehicle parameters | vehicle quality (m) | 2500 | kg |
| vehicle length (h) | 3800 | mm | |
| wind resistance area (Cd) | 2.5 | m2 | |
| coefficient of air resistance (A) | 0.4 | ||
| load mass (F) | 500 | kg | |
| transmission system | transmission ratio (ig) | 4.5 | |
| main reduction gear ratio (io) | 1 | ||
| tire | rolling radius (r) | 0.367 | m |
| rolling resistance coefficient (f) | 0.015 |
| Parameter Category | Parameter | Value | Unit |
|---|---|---|---|
| motor | rated power/maximum power | 18/50 | kW |
| rated speed/maximum speed | 3000/8000 | rpm | |
| rated torque/maximum torque | 90/150 | N·m | |
| rated voltage | 72 | V | |
| motor quality | 48 | kg | |
| vehicle battery pack | single battery voltage | 12 | V |
| single battery capacity | 200 | Ah | |
| total battery voltage | 12 × 6 = 72 | V | |
| total mass of battery pack | 420 | kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Ji, J.; Zhang, D.; Zheng, H.; Chen, W. A Fuzzy Drive Strategy for an Intelligent Vehicle Controller Unit Integrated with Connected Data. Machines 2021, 9, 215. https://doi.org/10.3390/machines9100215
Du L, Ji J, Zhang D, Zheng H, Chen W. A Fuzzy Drive Strategy for an Intelligent Vehicle Controller Unit Integrated with Connected Data. Machines. 2021; 9(10):215. https://doi.org/10.3390/machines9100215
Chicago/Turabian StyleDu, Luyao, Jun Ji, Donghua Zhang, Hongjiang Zheng, and Wei Chen. 2021. "A Fuzzy Drive Strategy for an Intelligent Vehicle Controller Unit Integrated with Connected Data" Machines 9, no. 10: 215. https://doi.org/10.3390/machines9100215
APA StyleDu, L., Ji, J., Zhang, D., Zheng, H., & Chen, W. (2021). A Fuzzy Drive Strategy for an Intelligent Vehicle Controller Unit Integrated with Connected Data. Machines, 9(10), 215. https://doi.org/10.3390/machines9100215