
On the Asymptotic Behavior and Parameter Estimation of a Double-Sided LCC-Compensated Wireless Power Transfer System

Abstract
:1. Introduction
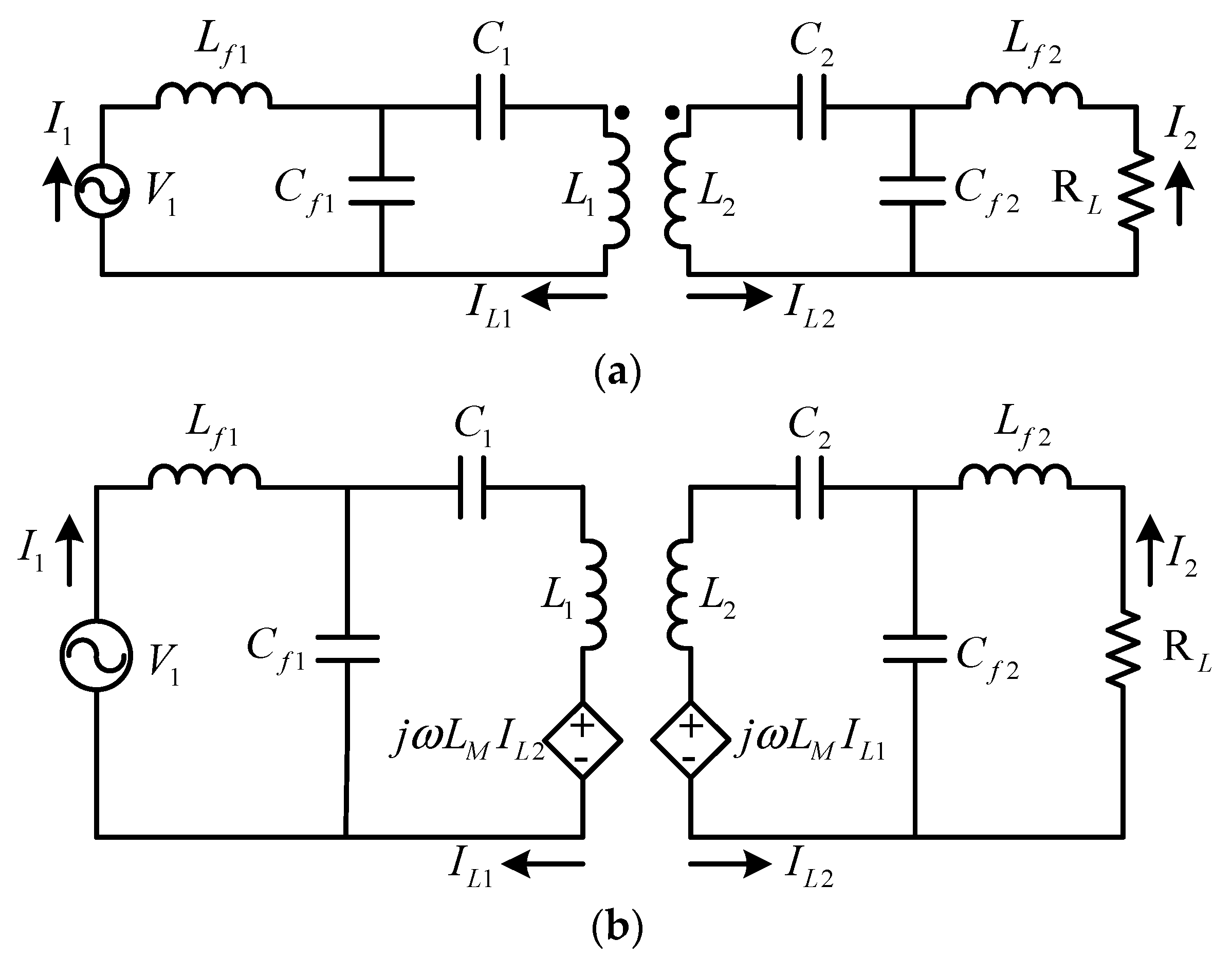
2. Problem Formulations
3. Steady Behavior of Primary Current I1(t)
4. Synthesis Process
4.1. Probability Density Function
4.2. Homogeneous Markov Chain
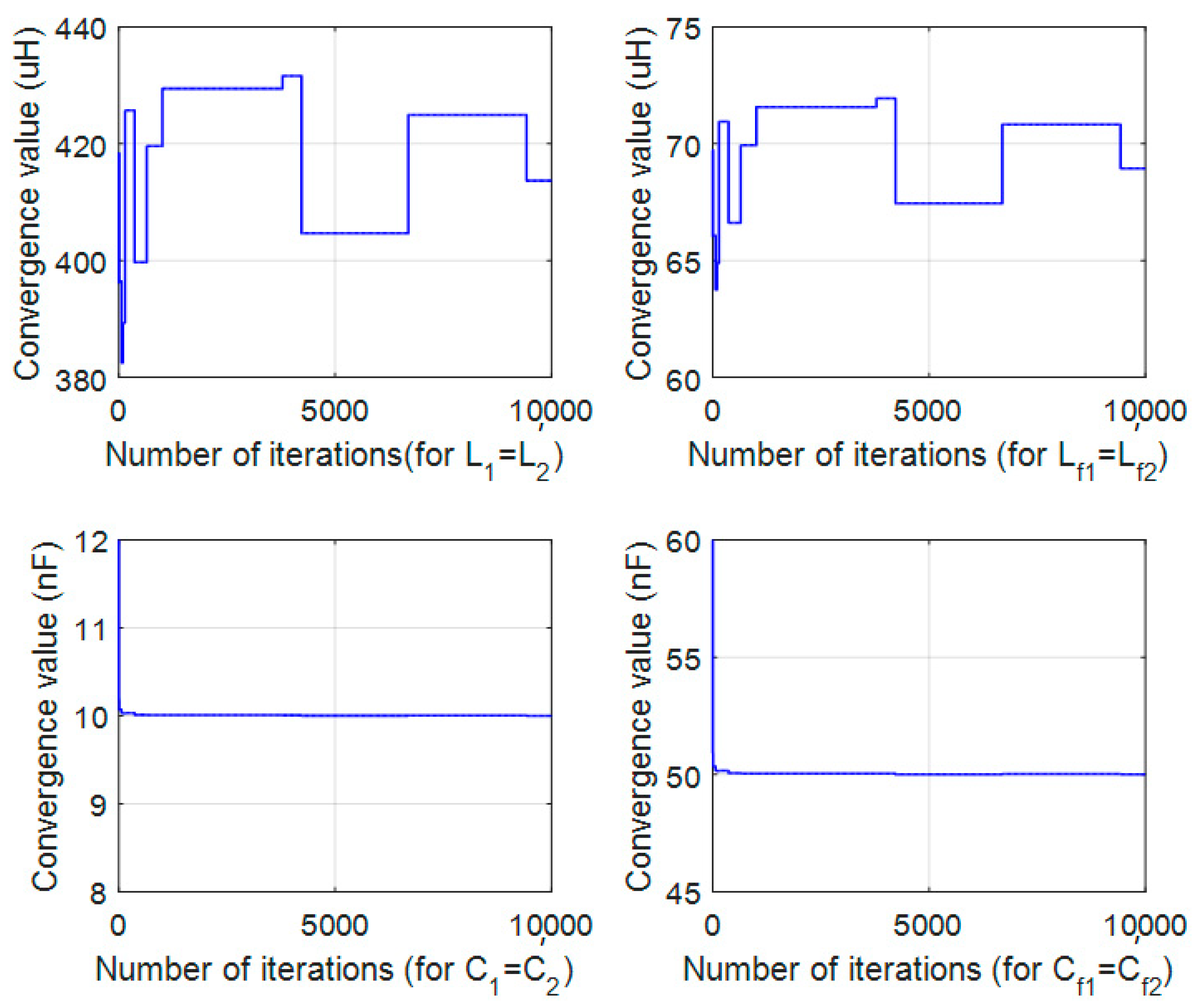
4.3. Estimation Algorithm
5. Simulations and Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Hu, J.-S.; Lu, F.; Zhu, C.; Cheng, C.-Y.; Chen, S.-L.; Ren, T.-J.; Mi, C.C. Hybrid Energy Storage System of An Electric Scooter Based on Wireless Power Transfer. IEEE Trans. Ind. Inform. 2018, 18, 4169–4178. [Google Scholar] [CrossRef]
- Imura, T.; Hori, Y. Maximizing Air Gap and Efficiency of Magnetic Resonant Coupling for Wireless Power Transfer Using Equivalent Circuit and Neumann Formula. IEEE Trans. Ind. Electron. 2011, 58, 4746–4752. [Google Scholar] [CrossRef]
- Tsai, J.-S.; Hu, J.-S.; Chen, S.-L.; Huang, X. Directional Antenna Design for Wireless Power Transfer System in Electric Scooters. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef] [Green Version]
- Bi, Z.; Kan, T.; Mi, C.C.; Zhang, Y.; Zhao, Z.; Keoleian, G.A. A Review of Wireless Power Transfer for Electric Vehicles: Prospects to Enhance Sustainable Mobility. Appl. Energy 2016, 179, 413–425. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Zhao, H.; Li, S.; Deng, J.; Kan, T.; Mi, C.C. Integrated LCC Compensation Topology for Wireless Charger in Electric and Plug-In Electric Vehicles. IEEE Trans. Ind. Electron. 2015, 62, 4215–4225. [Google Scholar] [CrossRef]
- Mosammam, B.M.; Mirsalim, M. New Integrated Tripolar Pad Using Double-Sided LCC Compensation for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2020, 69, 15633–15643. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, Y.; Liu, X.; Cheng, H.; Liu, M.; Xu, D. Analysis, Design, and Implementation of A Wireless Power and Data Transmission System Using Capacitive Coupling and Double-Sided LCC Compensation Topology. IEEE Trans. Ind. Appl. 2019, 55, 541–551. [Google Scholar] [CrossRef]
- Kan, T.; Lu, F.; Nguyen, T.; Mercier, P.P.; Mi, C.C. Integrated Coil Design for EV Wireless Charging Systems Using LCC Compensation Topology. IEEE Trans. Power Electron. 2018, 33, 9231–9241. [Google Scholar] [CrossRef]
- Zhang, X.; Kan, T.; You, C.; Mi, C.C. Modeling and analysis of AC Output Power Factor for Wireless Chargers in Electric Vehicles. IEEE Trans. Power Electron. 2017, 32, 1638–1650. [Google Scholar] [CrossRef]
- Hu, J.-S.; Wang, Y.; Fujimoto, H.; Hori, Y. Robust Yaw Stability Control for In-Wheel Motor Electric Vehicles. IEEE/ASME Trans. Mechatron. 2017, 22, 1360–1370. [Google Scholar] [CrossRef]
- Wang, K.; Wang, Y.; Wang, L.; Du, H.; Nam, K. Distributed Intersection Conflict Resolution for Multiple Vehicles Considering Longitudinal-Lateral Dynamics. IEEE Trans. Veh. Technol. 2021, 70, 4166–4177. [Google Scholar] [CrossRef]
- Yin, D.; Wang, J.; Du, J.; Chen, G.; Hu, J.-S. A New Torque Distribution Control for Four-Wheel Independent-Drive Electric Vehicles. Actuators 2021, 10, 122. [Google Scholar] [CrossRef]
- Guidi, G.; Lekkas, A.M.; Stranden, J.E.; Suul, J.A. Dynamic Wireless Charging of Autonomous Vehicles: Small-scale Demonstration of Inductive Power Transfer as An Enabling Technology for Self-Sufficient Energy Supply. IEEE Electrif. Mag. 2020, 8, 37–48. [Google Scholar] [CrossRef]
- Doan, V.; Fujimoto, H.; Koseki, T.; Yasuda, T.; Kishi, H.; Fujita, T. Allocation of Wireless Power Transfer System from Viewpoint of Optimal Control Problem for Autonomous Driving Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3255–3270. [Google Scholar] [CrossRef]
- Song, K.; Yang, G.; Zhang, H.; Huang, X.; Jiang, J.; Lan, Y.; Huang, X.; Li, J.; Zhu, C. An Impedance Decoupling-Based Tuning Scheme for Wireless Power Transfer System under Dual-Side Capacitance Drift. IEEE Trans. Power Electron. 2021, 36, 7526–7536. [Google Scholar] [CrossRef]
- Bhattacharya, N.; Waymire, E.C. Stochastic Processes with Applications; John Wiley & Sons: New York, NY, USA, 1990. [Google Scholar]
- Chib, S.; Greenberg, E. Understanding the Metropolis-Hastings algorithm. Am. Stat. 1995, 49, 327–335. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| DC Source | 10 V/1 A |
| 85 kHz | |
| 24.24 uH | |
| 144.5 nF | |
| 231.5 uH | |
| 15.36 nF | |
| 50.12 uH | |
| 67.27 nF | |
| 229.6 uH | |
| 19.64 nF | |
| 5 Ω | |
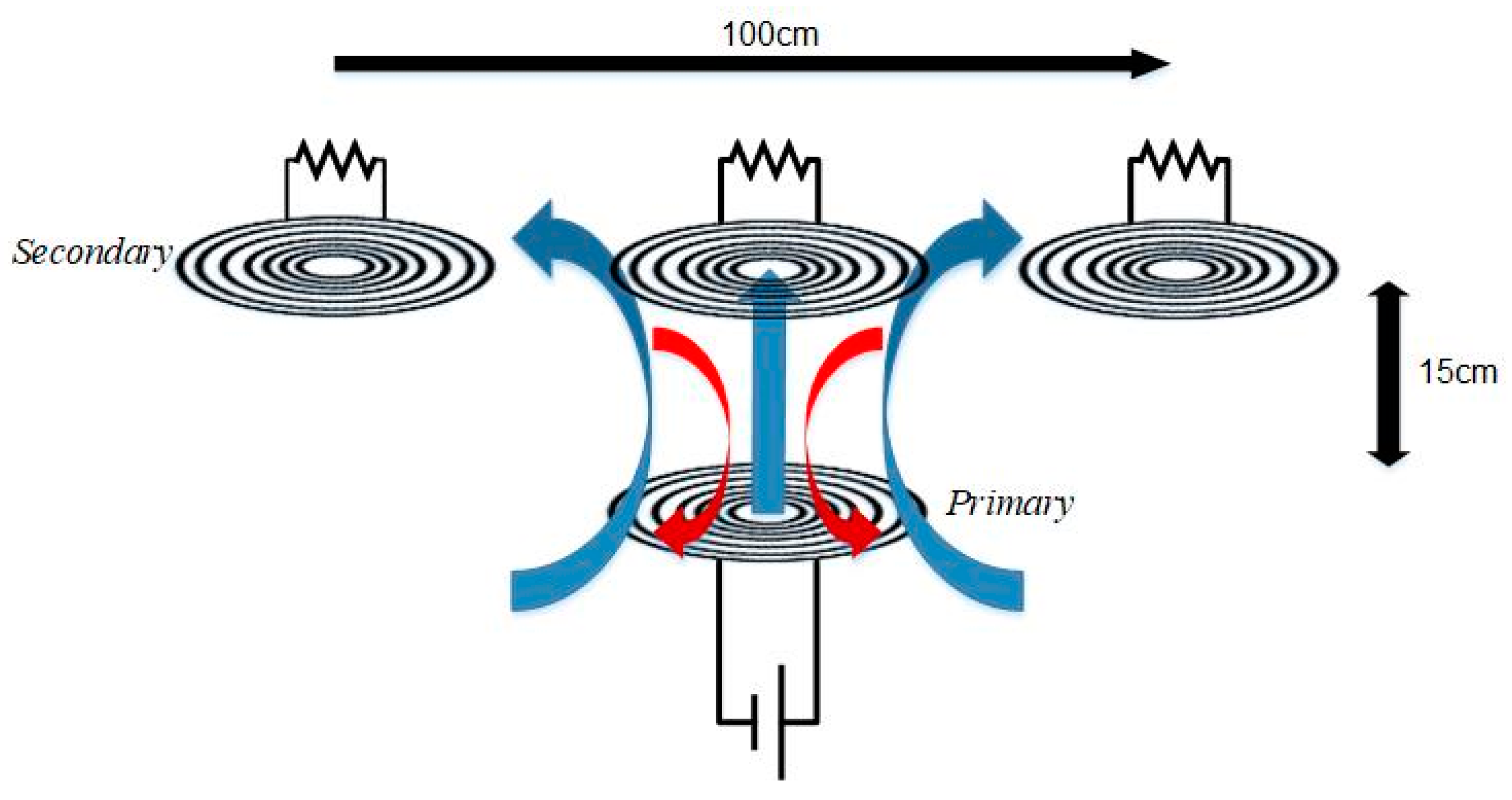
| Air Gap | 15 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, F.-R.; Hu, J.-S. On the Asymptotic Behavior and Parameter Estimation of a Double-Sided LCC-Compensated Wireless Power Transfer System. Machines 2021, 9, 287. https://doi.org/10.3390/machines9110287
Hu F-R, Hu J-S. On the Asymptotic Behavior and Parameter Estimation of a Double-Sided LCC-Compensated Wireless Power Transfer System. Machines. 2021; 9(11):287. https://doi.org/10.3390/machines9110287
Chicago/Turabian StyleHu, Feng-Rung, and Jia-Sheng Hu. 2021. "On the Asymptotic Behavior and Parameter Estimation of a Double-Sided LCC-Compensated Wireless Power Transfer System" Machines 9, no. 11: 287. https://doi.org/10.3390/machines9110287
APA StyleHu, F. -R., & Hu, J. -S. (2021). On the Asymptotic Behavior and Parameter Estimation of a Double-Sided LCC-Compensated Wireless Power Transfer System. Machines, 9(11), 287. https://doi.org/10.3390/machines9110287