
Test Evaluation Method for Lane Keeping Assistance System Using Dual Cameras


Abstract
:1. Introduction
2. Proposed Theoretical Equation for the LKAS
2.1. Background of Theoretical Equations
2.2. Variables of Camera Image
2.3. Geometrical Variables of Vehicle
2.4. Formulation
3. Actual Vehicle Test
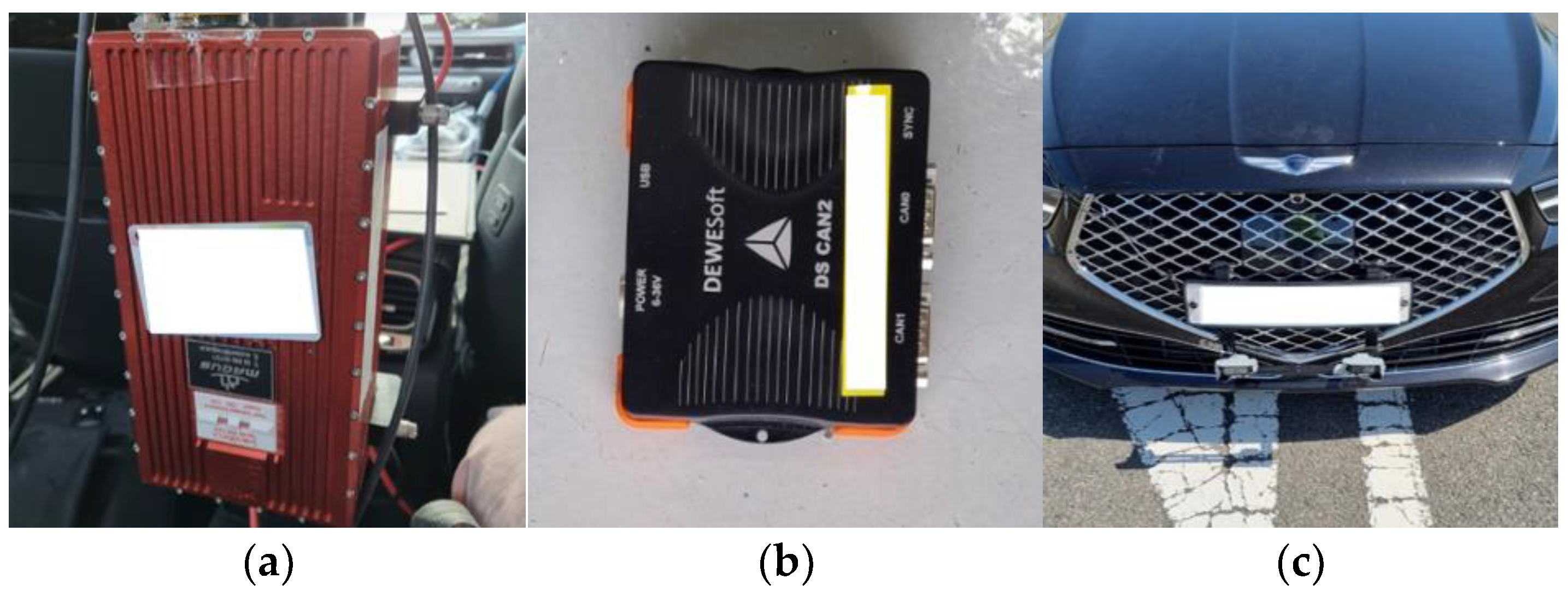
3.1. Test Vehicle and Equipment
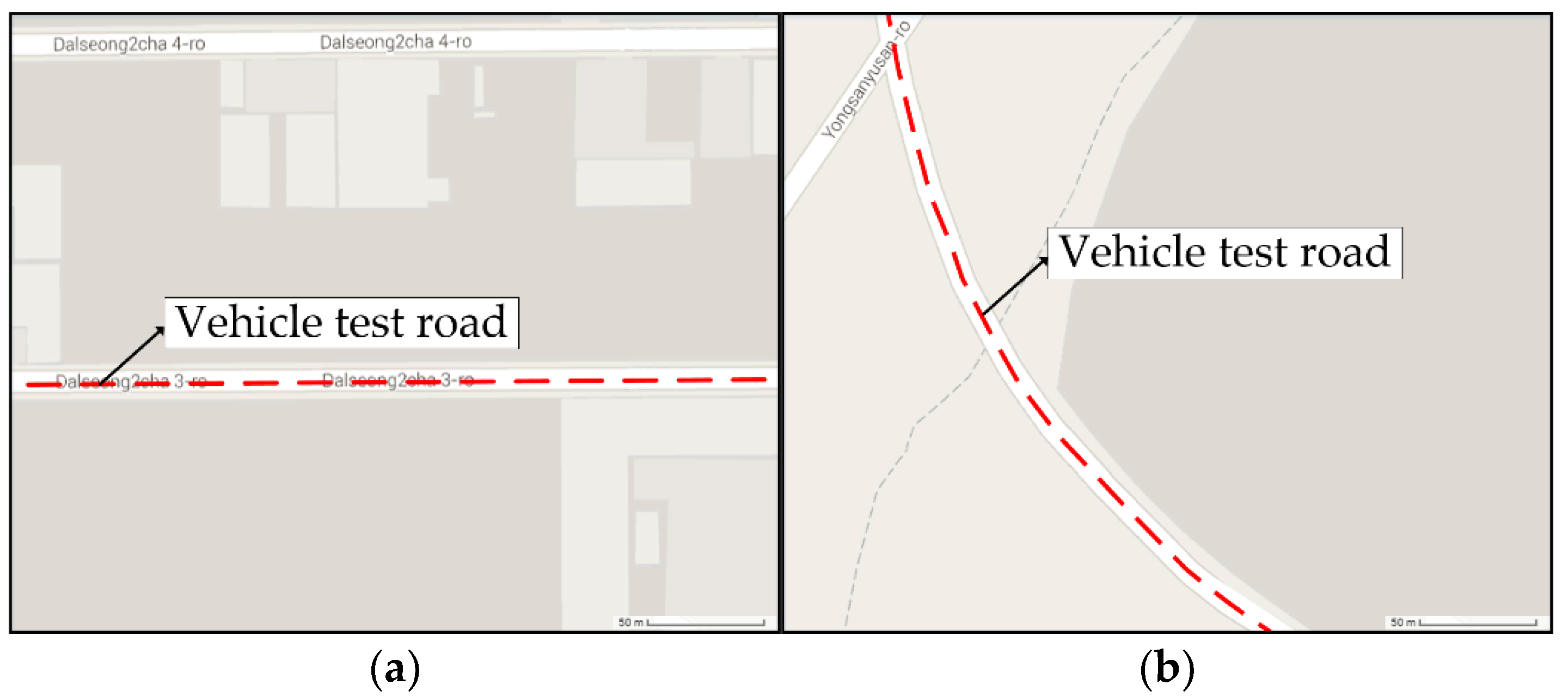
3.2. Vehicle Test Conditions and Location
4. Actual Vehicle Test Results
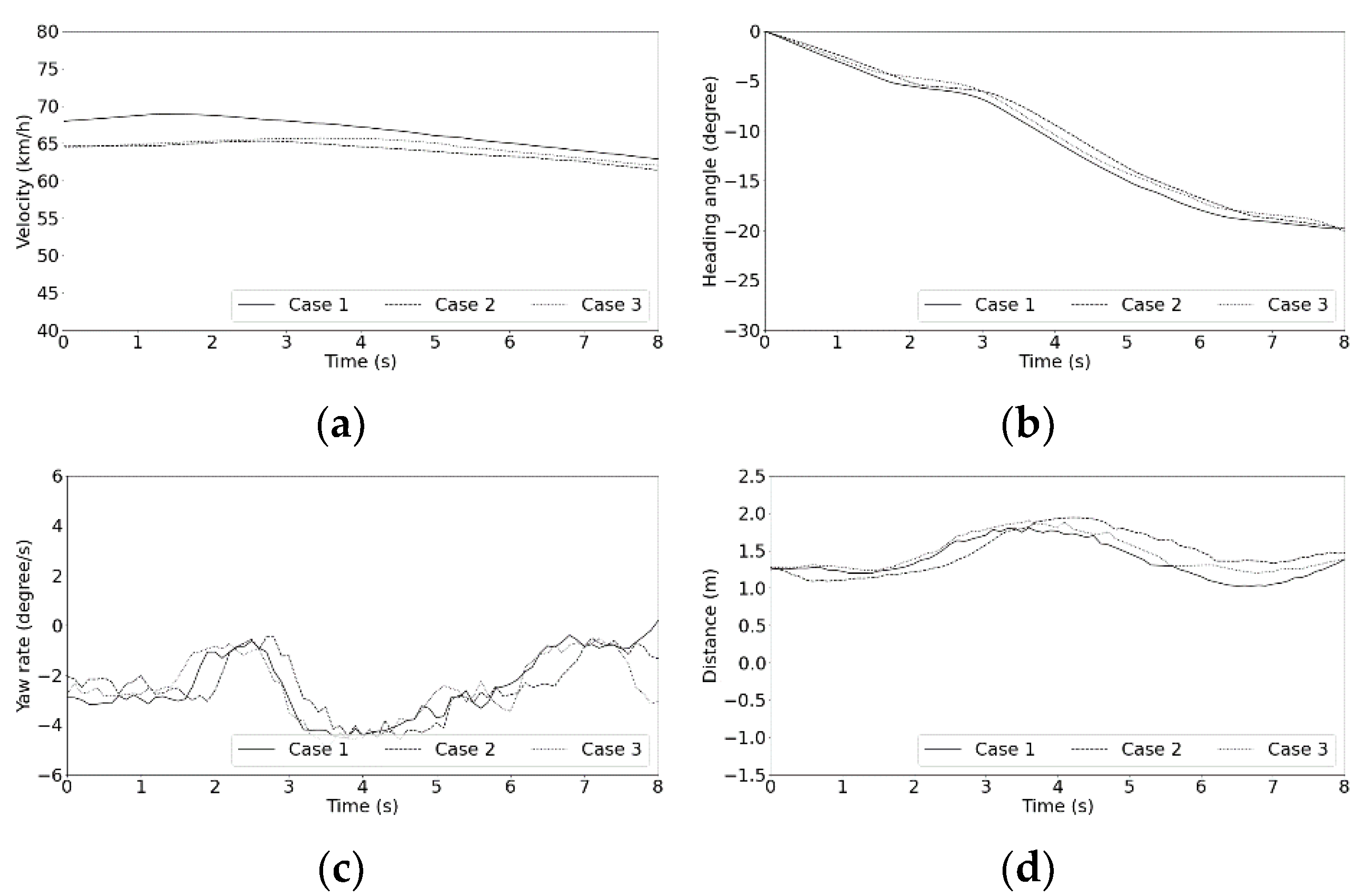
4.1. Measured Vehicle Test Data
4.2. Comparative Analysis of Theoretical and Measured Values
5. Conclusions
- Through the use of the optimal position of the dual cameras, image correction, focal length correction method, and lane detection algorithm proposed in a previous study, the values of the variables required by the theoretical equation were determined.
- A theoretical equation for calculating the distance from the front wheel of the vehicle to the lane was proposed. For this method, the variables obtained from the image captured by the camera and the geometric composition of the vehicle on the road were used.
- To verify the theoretical equation, tests were conducted based on four LKAS test-and-evaluation scenarios proposed in previous studies. For each scenario, the test was conducted three times under the same conditions to obtain objective data.
- Each theoretical value was calculated based on the image obtained using the dual cameras mounted on the vehicle, whereas the corresponding actual value was calculated based on the image obtained using the side camera. For each scenario, the dynamic characteristics of the vehicle were confirmed using experimental equipment installed on the actual vehicle.
- In the actual vehicle test conducted to verify the study, the velocity, heading angle, and yaw rate data obtained through specialized equipment were analyzed. In addition, it was confirmed that four LKAS scenarios for safety evaluation were properly per-formed. In addition, in order to verify the proposed theoretical equation, the actual value obtained from the side cameras installed on the left and right sides of the vehicle and the theoretical value obtained from the front dual camera were compared and analyzed. The maximum deviation in the whole scenario is 0.17 m, which is similar to the width of a general lane, so the proposed method was judged to be reliable.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- SAE Levels of Driving Automation™ Refined for Clarity and International Audience. Available online: https://www.sae.org/blog/sae-j3016-update (accessed on 18 August 2021).
- Shin, H.C.; Kang, K.P.; Park, S.Y. Transport Innovation Prospects and Challenges—Focusing on autonomous vehicle and UAM. Mon. KOTI Mag. Transp. 2021, 4, 6–10. [Google Scholar]
- TAAS Traffic Accident Detailed Statistics. Available online: http://taas.koroad.or.kr/web/shp/sbm/initUnityAnalsSys.do?menuId=WEB_KMP_OVT_UAS (accessed on 18 August 2021).
- Jo, Y.; Oh, C. Lane Keeping Assist System (LKAS) Effect Analysis Using Meta-Analysis. In Proceedings of the KOR-KST Conference, Seongnam, Korea, 16–17 February 2017. [Google Scholar]
- An, X.; Shang, E.; Song, J.; Li, J.; He, H. Real-time Lane Departure Warning System Based on a Single FPGA. EURASIP J. Image Video Process. 2013, 2013, 38. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Park, S. LSTM Based LKAS Yaw Rate Prediction Model Using Lane Information and Steering Angle. Trans. Korean Soc. Automot. Eng. 2018, 26, 279–287. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.; Kim, H.; Jun, S.; Boo, K. A Study on Real-Time Detection Method of Lane and Vehicle for Lane Change Assistant System Using Vision System on Highway. Eng. Sci. Technol. Int. J. 2018, 21, 822–833. [Google Scholar] [CrossRef]
- Shin, K.; Choi, J.; Huh, K. Study on the Automated Lane Change Algorithm Using Vision Sensor and Pseudo-lane. Trans. Korean Soc. Automot. Eng. 2019, 27, 925–932. [Google Scholar] [CrossRef]
- Em, P.P.; Hossen, J.; Fitrian, I.; Wong, E.K. Vision-Based Lane Departure Warning Framework. Heliyon 2019, 5, e02169. [Google Scholar] [CrossRef] [Green Version]
- Bian, Y.; Ding, J.; Hu, M.; Xu, Q.; Wang, J.; Li, K. An Advanced Lane-Keeping Assistance System With Switchable Assistance Modes. IEEE Trans. Intell. Transp. Syst. 2020, 21, 385–396. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, L.; Wang, H.; Huang, Y. Parallel Distributed Compensation /H∞ Control of Lane-keeping System Based on the Takagi-Sugeno Fuzzy Model. Chin. J. Mech. Eng. 2020, 33, 61. [Google Scholar] [CrossRef]
- Yoo, J.; Kim, D. Graph Model-Based Lane-Marking Feature Extraction for Lane Detection. Sensors 2021, 21, 4428. [Google Scholar] [CrossRef]
- Meng, Q.; Zhao, X.; Hu, C.; Sun, Z.-Y. High Velocity Lane Keeping Control Method Based on the Non-Smooth Finite-Time Control for Electric Vehicle Driven by Four Wheels Independently. Electronics 2021, 10, 760. [Google Scholar] [CrossRef]
- Xu, X.; Grizzle, J.W.; Tabuada, P.; Ames, A.D. Correctness Guarantees for the Composition of Lane Keeping and Adaptive Cruise Control. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1216–1229. [Google Scholar] [CrossRef] [Green Version]
- Péter, G.; Kiss, B.; Tihanyi, V. Vision and odometry based autonomous vehicle lane changing. ICT Express 2019, 5, 219–226. [Google Scholar] [CrossRef]
- Kővári, B.; Hegedüs, F.; Bécsi, T. Design of a Reinforcement Learning-Based Lane Keeping Planning Agent for Automated Vehicles. Appl. Sci. 2020, 10, 7171. [Google Scholar] [CrossRef]
- Gaikwad, V.; Lokhande, S. Lane Departure Identification for Advanced Driver Assistance. IEEE Trans. Intell. Transp. Syst. 2015, 16, 910–918. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H.; Lu, P.; Zhu, M.; Tang, Y. Design and Experiments of Safeguard Protected Preview Lane Keeping Control for Autonomous Vehicles. IEEE Access 2020, 8, 29944–29953. [Google Scholar] [CrossRef]
- Yang, J.; Kim, S.; Huh, K. Development of a Unified Lane-Keeping and Collision Avoidance System for Semi-Trailer Truck. IEEE Access 2020, 8, 149751–149763. [Google Scholar] [CrossRef]
- Woo, H.; Yong, B.; Kim, K. Performance Evaluation of Lane Keeping Assistance System. J. Auto-Veh. Saf. Assoc. 2014, 6, 29–35. [Google Scholar] [CrossRef]
- Yoon, P.; Lee, S. A Study on Evaluation Method of the LKAS Test in Domestic Road Environment. J. Korea Acad.-Ind. Coop. Soc. 2017, 18, 628–637. [Google Scholar] [CrossRef]
- Bae, G.H.; Lee, S.B. A Study on the Simulation Modeling Method of LKAS Test Evaluation. J. Korea Acad.-Ind. Coop. Soc. 2020, 21, 57–64. [Google Scholar] [CrossRef]
- Reddy, N.; Farah, H.; Huang, Y.; Dekker, T.; Arem, B.V. Operational Design Domain Requirements for Improved Performance of Lane Assistance Systems: A Field Test Study in The Netherlands. IEEE Open J. Intell. Transp. Syst. 2020, 1, 237–252. [Google Scholar] [CrossRef]
- Jiang, B.; Li, X.; Zeng, Y.; Liu, D. A Maneuver Evaluation Algorithm for Lane-Change Assistance System. Electronics 2021, 10, 774. [Google Scholar] [CrossRef]
- Lee, K.; Li, S.E.; Kum, D. Synthesis of Robust Lane Keeping Systems: Impact of Controller and Design Parameters on System Performance. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3129–3141. [Google Scholar] [CrossRef]
- Hwang, J.; Huh, K.; Na, H.; Jung, H.; Kang, H.; Yoon, P. Evaluation of Lane Keeping Assistance Controllers in HIL Simulations. In Proceedings of the 17th IFAC World Congress, Seoul, Korea, 6–11 July 2008. [Google Scholar] [CrossRef] [Green Version]
- Bae, G.H.; Lee, S.B. A Study on the Test Evaluation Method of LKAS Using a Monocular Camera. J. Auto-Veh. Saf. Assoc. 2020, 12, 34–42. [Google Scholar] [CrossRef]
- Lee, S.-H.; Kim, B.-J.; Lee, S.-B. Study on Image Correction and Optimization of Mounting Positions of Dual Cameras for Vehicle Test. Energies 2021, 14, 4857. [Google Scholar] [CrossRef]
- Kim, J.; Jun, I. Development of an Evaluation System for a Lane Keeping Assistance System using the Real-time Image. In Proceedings of the KSAE 2019 Annual Autumn Conference & Exhibition, Goyang, Korea, 19–22 November 2014. [Google Scholar]
- Yoon, P.; Lee, S. A Study on Safety Evaluation Method of LKAS in Actual Road. J. Auto-Veh. Saf. Assoc. 2019, 10, 33–39. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Specification |
|---|---|
| Genesis G90 | Overall length: 5205 mm; |
| Overall width: 1915 mm; | |
| Overall height: 1495 mm; | |
| Wheel base: 3160 mm; Drive type: all-wheel drive |
| Name | Specification |
|---|---|
| RT3002 | L1/L2 Kinematic GPS with positioning accuracy to 2 cm RMS; Single-antenna model; Velocity accuracy: 0.05 km/h RMS; Roll, pitch: 0.03°; Heading: 0.1°; GPS accuracy: 2 cm RMS |
| DS-CAN2 | Interface data rate: up to 1 bit/s; Sampling rate: >10 kHz per channel software selectable |
| Camera | Focal length: 3.67 mm; Diagonal field of view: 70.42°; Horizontal field of view: 43.3°; Diagonal field of view: 78°; Max frame rate: 1080 p@30 fps; Optical resolution: 3 megapixels; |
| Name | Curvature (m) | Width (m) | Length (m) | Condition |
|---|---|---|---|---|
| Straight road | 0 | 3.1 | 300 m | Dry and flat asphalt |
| Curved road | 500 | 3.1 | 350 m | Dry and flat asphalt |
| Scenario | Case | Actual Distance (m) | Theoretical Distance (m) | Deviation (m) | Error (%) |
|---|---|---|---|---|---|
| 1 | 1 | 1.01 | 0.87 | −0.14 | 13.9 |
| 2 | 0.67 | 0.54 | −0.13 | 19.4 | |
| 3 | 0.93 | 0.80 | −0.12 | 14.0 | |
| 2 | 1 | 1.48 | 1.34 | −0.14 | 9.5 |
| 2 | 1.83 | 1.72 | −0.11 | 6.0 | |
| 3 | 1.34 | 1.22 | −0.13 | 9.0 | |
| 3 | 1 | 1.80 | 1.63 | −0.17 | 9.4 |
| 2 | 1.41 | 1.25 | −0.16 | 11.3 | |
| 3 | 1.38 | 1.21 | −0.17 | 12.3 | |
| 4 | 1 | 1.73 | 1.88 | 0.15 | 8.7 |
| 2 | 1.79 | 1.64 | −0.15 | 8.4 | |
| 3 | 1.57 | 1.44 | −0.13 | 8.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-H.; Lee, S.-B. Test Evaluation Method for Lane Keeping Assistance System Using Dual Cameras. Machines 2021, 9, 310. https://doi.org/10.3390/machines9120310
Lee S-H, Lee S-B. Test Evaluation Method for Lane Keeping Assistance System Using Dual Cameras. Machines. 2021; 9(12):310. https://doi.org/10.3390/machines9120310
Chicago/Turabian StyleLee, Si-Ho, and Seon-Bong Lee. 2021. "Test Evaluation Method for Lane Keeping Assistance System Using Dual Cameras" Machines 9, no. 12: 310. https://doi.org/10.3390/machines9120310
APA StyleLee, S. -H., & Lee, S. -B. (2021). Test Evaluation Method for Lane Keeping Assistance System Using Dual Cameras. Machines, 9(12), 310. https://doi.org/10.3390/machines9120310