
Row End Detection and Headland Turning Control for an Autonomous Banana-Picking Robot



Abstract
:1. Introduction
- A complete method for an agricultural robot turning at the headland was developed.
- The preview distance, which has a significant effect on the performance of fast posture adjustment, was studied and its optimal range was also determined by test.
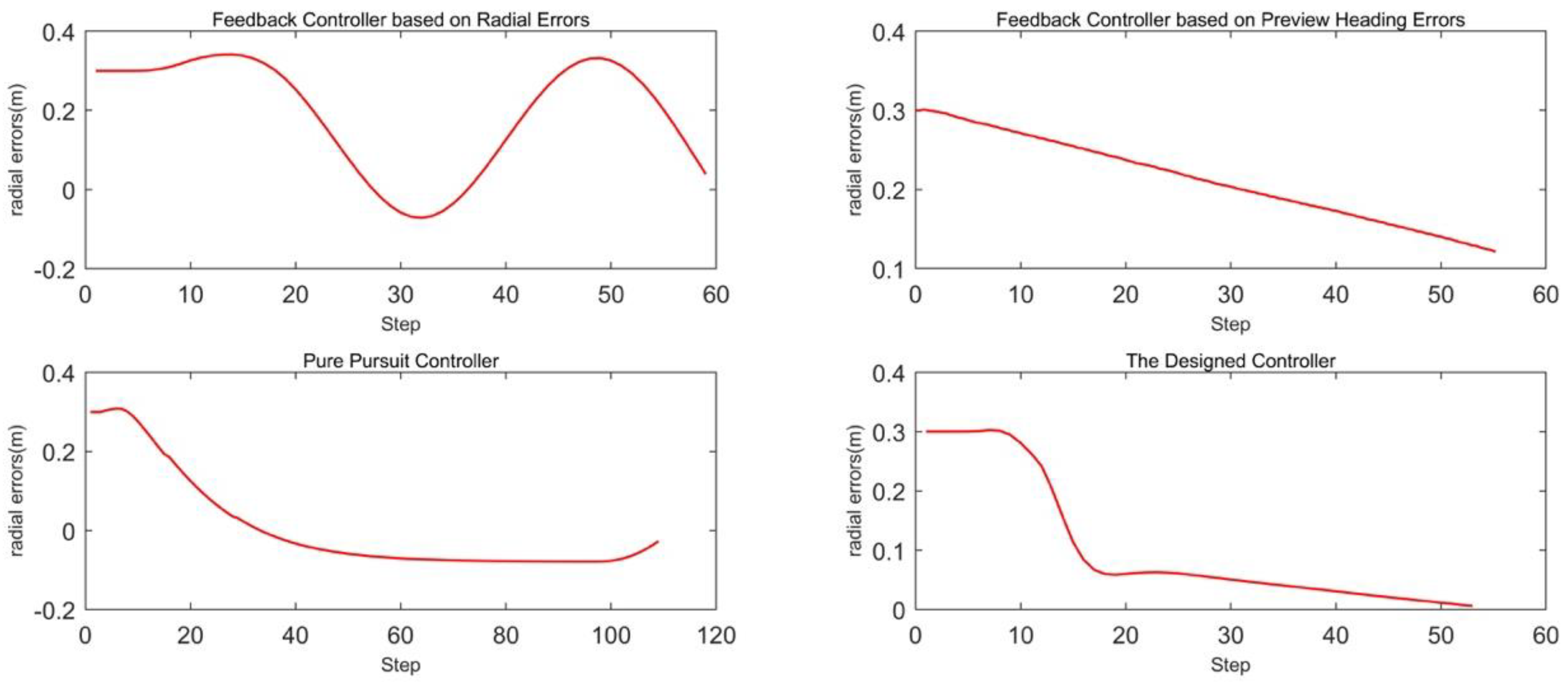
- A simulation and experimental tests of the designed method were carried out, and it was compared with different methods in terms of different aspects, such as space, turning time, and deviation.
2. Materials and Methods
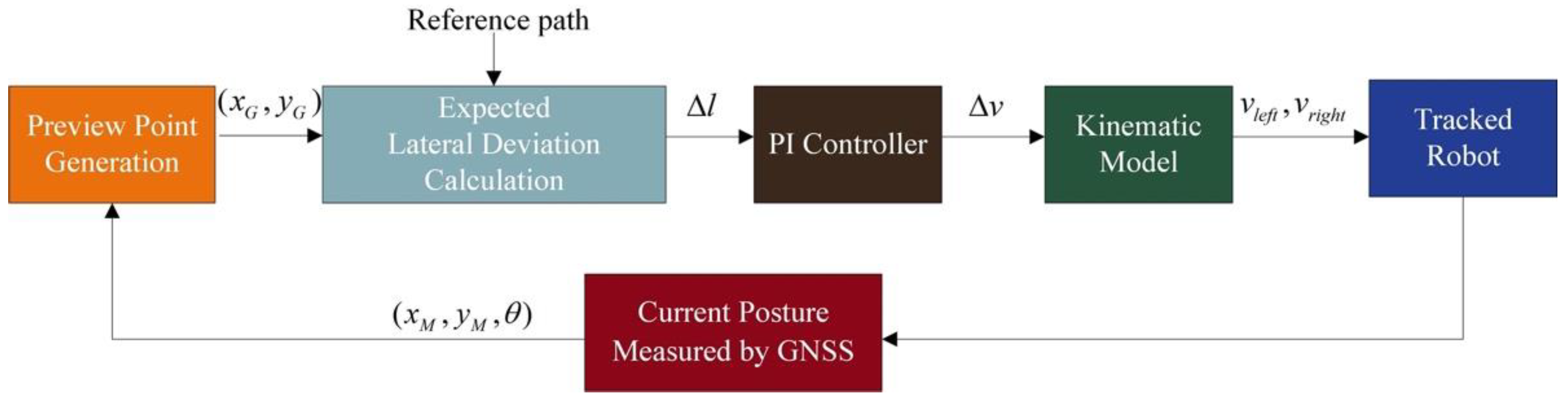
2.1. System Architecture
2.2. Headland Detection Based on Vision
2.3. Posture Adjustment Based on GNSS
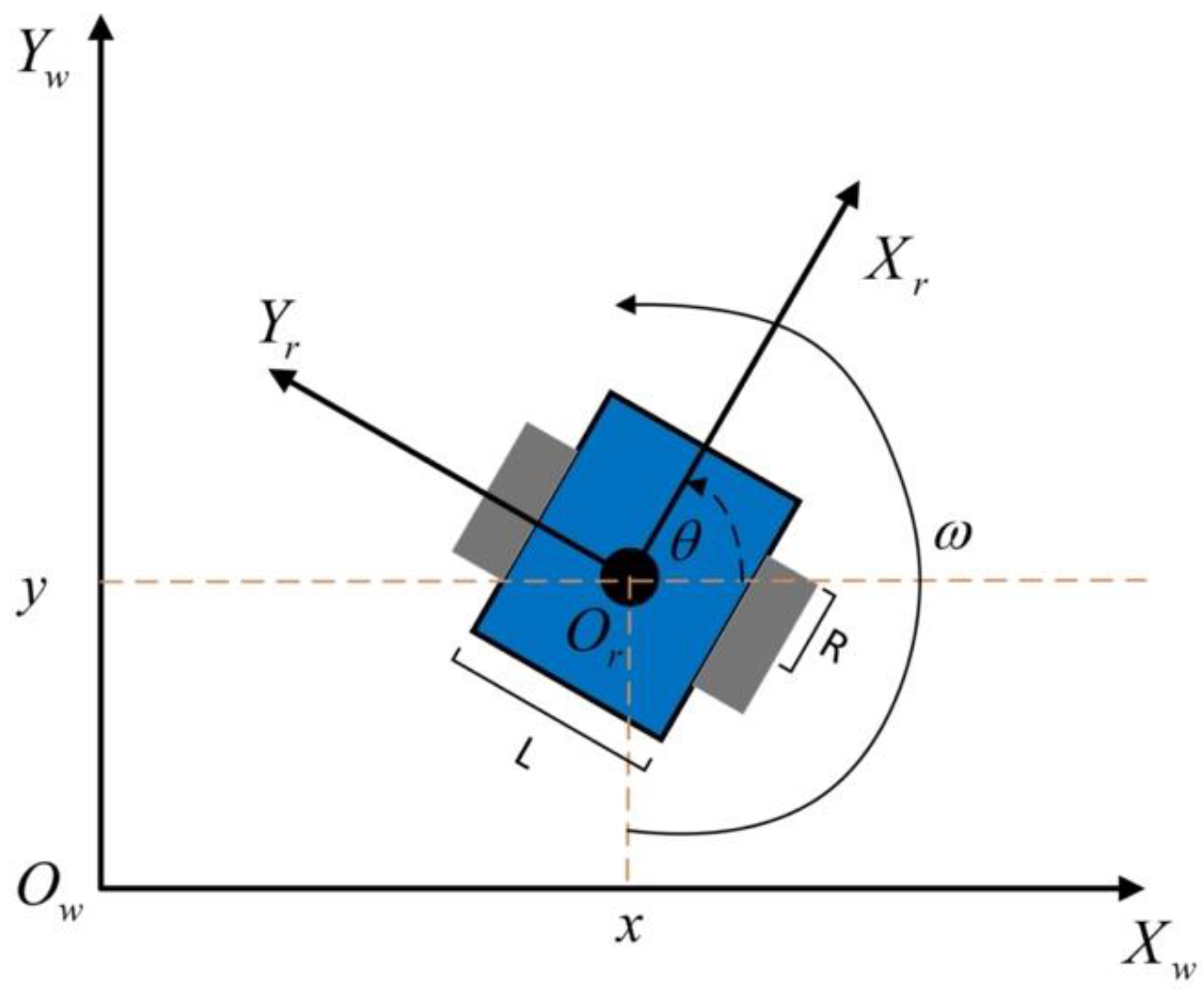
2.3.1. Kinematics Model
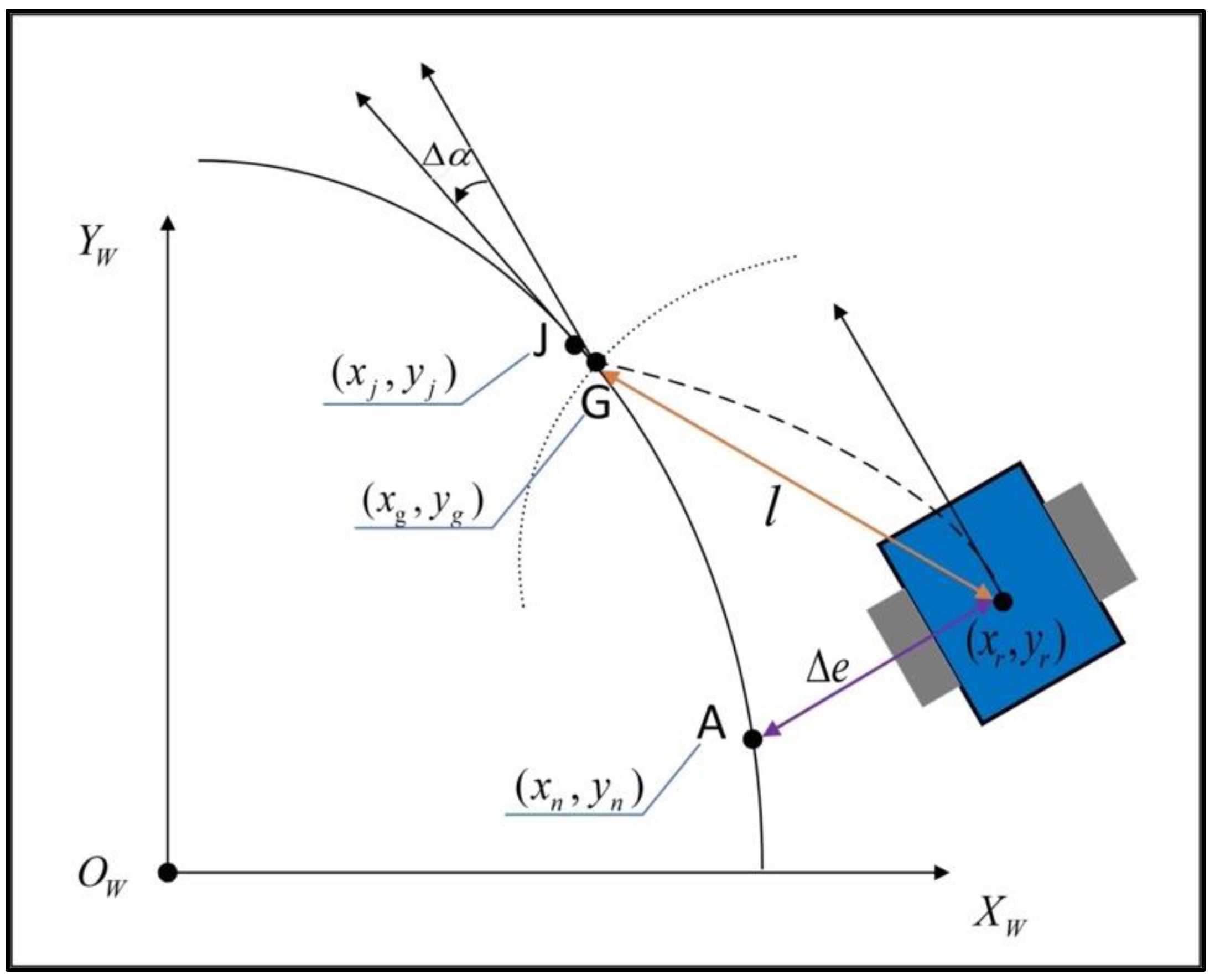
2.3.2. Preview Point Generation
2.3.3. Posture Adjustment Controller Design
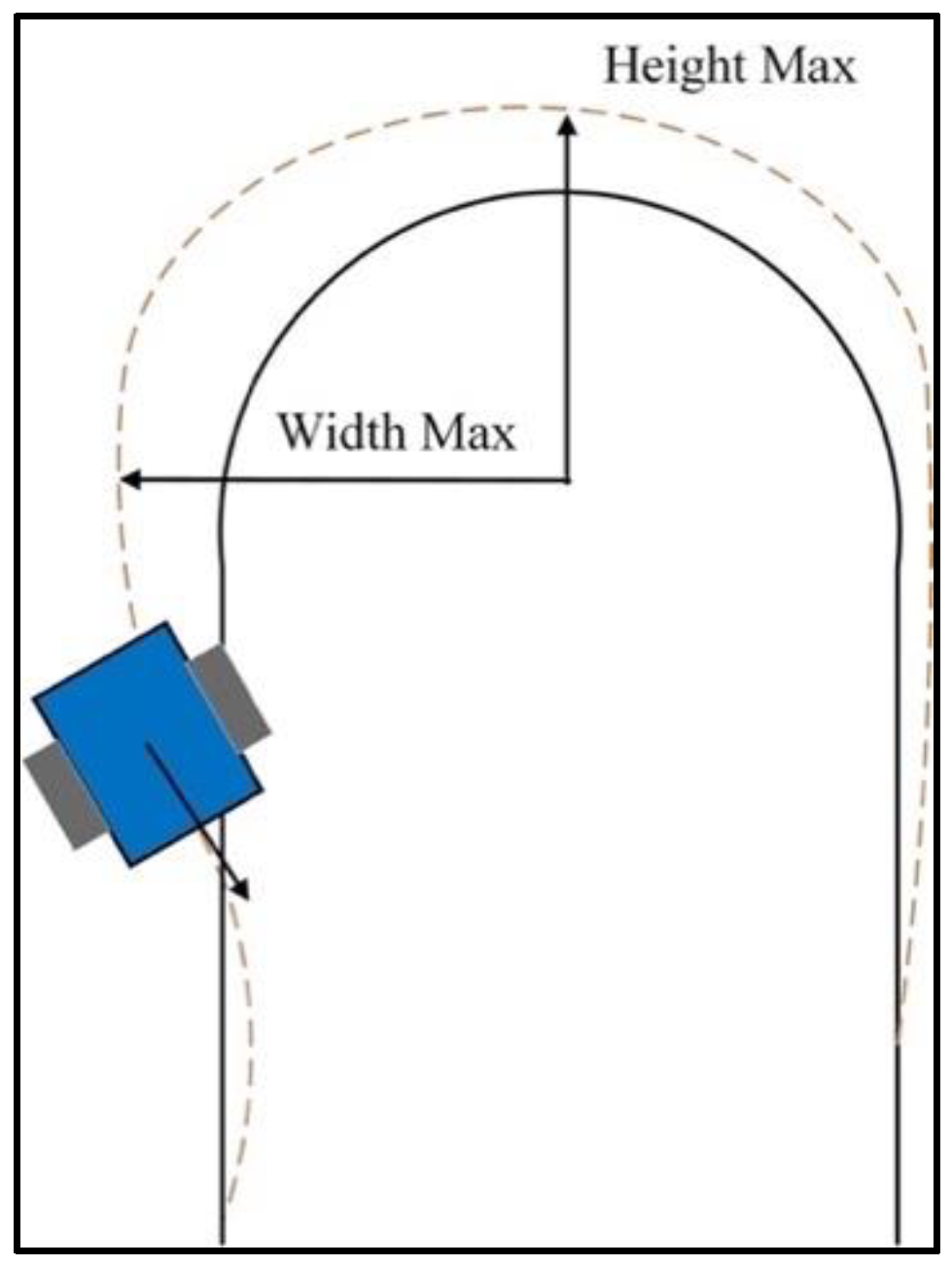
2.4. Headland Turning Control Method
3. Results and Discussion
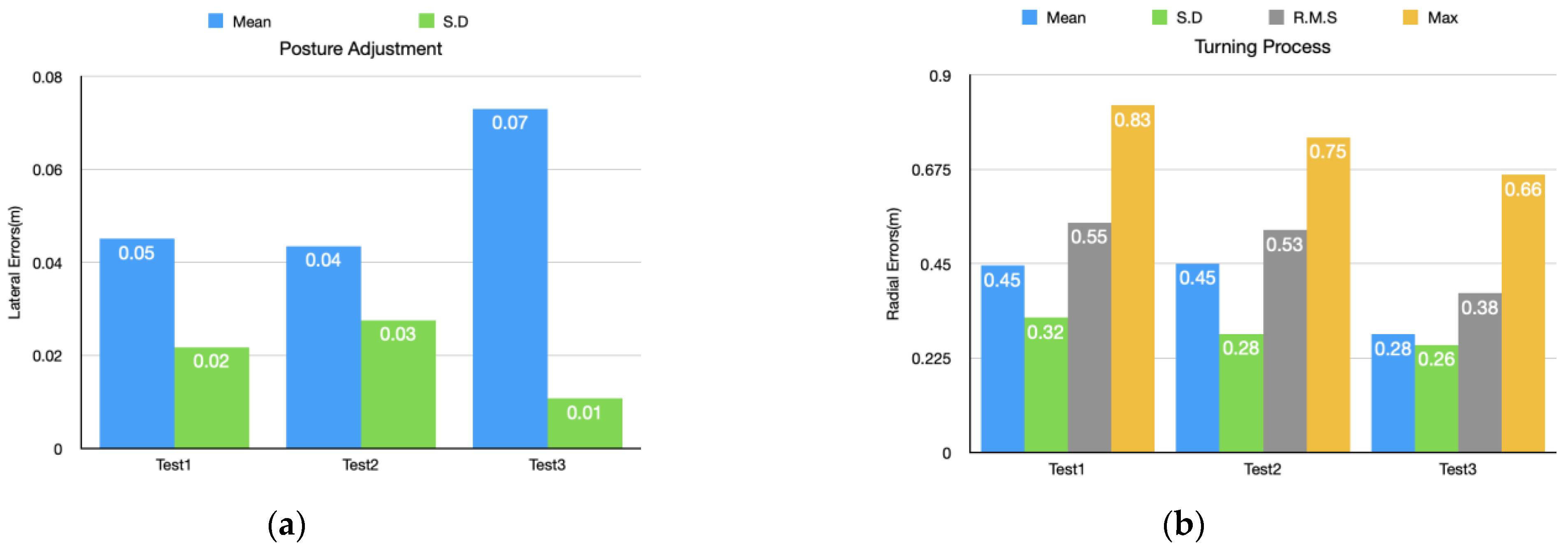
3.1. Posture Adjustment Experiment
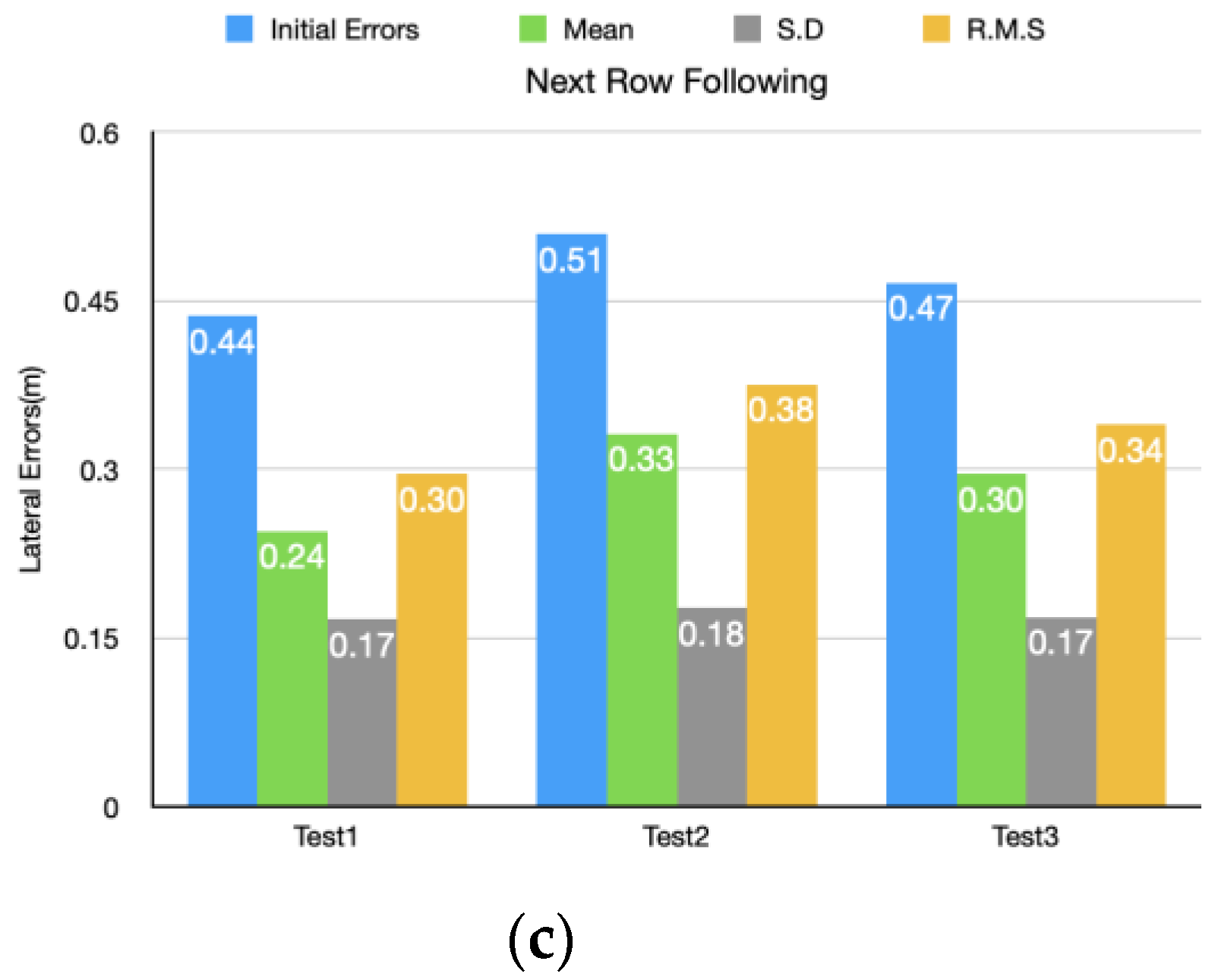
3.2. Headland Turning Experiment
3.2.1. Simulation
3.2.2. Experimental Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, M.; Ji, Y.; Li, S.; Cao, R.; Xu, H.; Zhang, Z. Research Progress of Agricultural Machinery Navigation Technology. Trans. CSAM 2020, 51, 1–18. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, B.; Lyu, H.; Kang, F.; Jiang, S. Research progress of orchard plant protection mechanization technology and equipment in China. Trans. CSAE 2020, 36, 110–124. [Google Scholar] [CrossRef]
- Zhang, W.; Gong, L.; Chen, S.; Wang, W.; Miao, Z.; Liu, C. Autonomous Identification and Positioning of Trucks during Collaborative Forage Harvesting. Sensors 2021, 21, 1166. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.; Zhou, H.; Wang, X.; Chen, C. Real-Time Fruit Recognition and Grasping Estimation for Robotic Apple Harvesting. Sensors 2020, 20, 5670. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and localization methods for vision-based fruit picking robots: A review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [Google Scholar] [CrossRef]
- Bonadies, S.; Gadsden, S.A. An overview of autonomous crop row navigation strategies for unmanned ground vehicles. Eng. Agric. Environ. Food 2019, 12, 24–31. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Wang, C. Three-dimensional reconstruction of guava fruits and branches using instance segmentation and geometry analysis. Comput. Electron. Agric. 2021, 184, 106107. [Google Scholar] [CrossRef]
- Wang, H.; Dong, L.; Zhou, H.; Luo, L.; Lin, G.; Wu, J.; Tang, Y. YOLOv3-Litchi Detection Method of Densely Distributed Litchi in Large Vision Scenes. Math. Probl. Eng. 2021, 2021, 1–11. [Google Scholar] [CrossRef]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of Fruit-bearing Branches and Localization of Litchi Clusters for Vision-based Harvesting Robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Cheng, J.; Xiong, J. Fruit detection in natural environment using partial shape matching and probabilistic Hough transform. Precis. Agric. 2020, 21, 160–177. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Li, L.; He, Y. High-accuracy multi-camera reconstruction enhanced by adaptive point cloud correction algorithm. Opt. Lasers Eng. 2019, 122, 170–183. [Google Scholar] [CrossRef]
- Wang, C.; Tang, Y.; Zou, X.; Luo, L.; Chen, X. Recognition and matching of clustered mature litchi fruits using binocular charge-coupled device (CCD) color cameras. Sensors 2017, 17, 2564. [Google Scholar] [CrossRef] [Green Version]
- Guevara, L.; Michałek, M.M.; Cheein, F.A. Headland turning algorithmization for autonomous N-trailer vehicles in agricultural scenarios. Comput. Electron. Agric. 2020, 175, 105541. [Google Scholar] [CrossRef]
- Bulgakov, V.; Pascuzzi, S.; Beloev, H.; Ivanovs, S. Theoretical Investigations of the Headland turning Agility of a Trailed Asymmetric Implement-and-Tractor Aggregate. Agriculture 2019, 9, 224. [Google Scholar] [CrossRef] [Green Version]
- Roshanianfard, A.; Noguchi, N.; Okamoto, H.; Ishii, K. A review of autonomous agricultural vehicles (The experience of Hokkaido University). J. Terramech. 2020, 91, 155–183. [Google Scholar] [CrossRef]
- Chen, J.; Qiang, H.; Wu, J.; Xu, G.; Wang, Z. Navigation path extraction for greenhouse cucumber-picking robots using the prediction-point Hough transform. Comput. Electron. Agric. 2021, 180, 105911. [Google Scholar] [CrossRef]
- Vougioukas, S.G. Agricultural Robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 365–392. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Santos, C.H.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Tu, X.; Tang, L. Headland turning optimisation for agricultural vehicles and those with towed implements. J. Agric. Food Res. 2019, 1, 100009. [Google Scholar] [CrossRef]
- Evans, J.T.; Pitla, S.K.; Luck, J.D.; Kocher, M. Row crop grain harvester path optimization in headland patterns. Comput. Electron. Agric. 2020, 171, 105295. [Google Scholar] [CrossRef]
- Vahdanjoo, M.; Madsen, C.T.; Sørensen, C.G. Novel Route Planning System for Machinery Selection. Case: Slurry Application. Agric. Eng. 2020, 2, 408–429. [Google Scholar] [CrossRef]
- Rokonuzzaman, M.; Mohajer, N.; Nahavandi, S.; Mohamed, S. Review and performance evaluation of path tracking controllers of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 646–670. [Google Scholar] [CrossRef]
- Wang, H.; Noguchi, N. Adaptive turning control for an agricultural robot tractor. Int. J. Agric. Biol. Eng. 2018, 11, 113–119. [Google Scholar] [CrossRef] [Green Version]
- Huang, P.; Luo, X.; Zhang, Z. Field verification of the autonomous agricultural machine headland turning control method. Int. Agric. Eng. J. 2016, 25, 98–105. [Google Scholar]
- Yin, J.; Zhu, D.; Liao, J.; Zhu, G.; Wang, Y.; Zhang, S. Automatic Steering Control Algorithm Based on Compound Fuzzy PID for Rice Transplanter. Appl. Sci. 2019, 9, 2666. [Google Scholar] [CrossRef] [Green Version]
- Pandey, P.C.; Tripathi, A.K.; Sharma, J.K. Chapter 16—An evaluation of GPS opportunity in market for precision agriculture. In GPS and GNSS Technology in Geosciences; Petropoulos, G.P., Srivastava, P.K., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 337–349. [Google Scholar] [CrossRef]
- Bräunl, T. Embedded Robotics: Mobile Robot Design and Applications with Embedded Systems; Springer Science & Business Media: Berlin, Germany, 2008; pp. 4–5. [Google Scholar]
- Samuel, M.; Hussein, M.; Mohamad, M.B. A review of some pure-pursuit based path tracking techniques for control of autonomous vehicle. Int. J. Comput. Appl. 2016, 135, 35–38. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turning Time (s) | Headland Heigh Max (m) | Headland Width Max (m) | |
|---|---|---|---|
| Feedback 1 | 17.4 | 3.30 | 1.15 |
| Feedback 2 | 18.6 | 2.37 | 2.0 |
| Designed | 13.0 | 1.83 | 1.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, P.; Zhu, L.; Zhang, Z.; Yang, C. Row End Detection and Headland Turning Control for an Autonomous Banana-Picking Robot. Machines 2021, 9, 103. https://doi.org/10.3390/machines9050103
Huang P, Zhu L, Zhang Z, Yang C. Row End Detection and Headland Turning Control for an Autonomous Banana-Picking Robot. Machines. 2021; 9(5):103. https://doi.org/10.3390/machines9050103
Chicago/Turabian StyleHuang, Peichen, Lixue Zhu, Zhigang Zhang, and Chenyu Yang. 2021. "Row End Detection and Headland Turning Control for an Autonomous Banana-Picking Robot" Machines 9, no. 5: 103. https://doi.org/10.3390/machines9050103
APA StyleHuang, P., Zhu, L., Zhang, Z., & Yang, C. (2021). Row End Detection and Headland Turning Control for an Autonomous Banana-Picking Robot. Machines, 9(5), 103. https://doi.org/10.3390/machines9050103