1. Introduction
With the continuous development of the marine economy, the water transportation pattern and the distribution of water traffic risks constantly change, and the authorities have a great responsibility in water safety management, offshore patrol and maritime search and rescue [
1,
2]. The USV has become an important part of the unmanned system at sea that the authorities use to complete the task. The water patrol tasks are to protect the safety of the waters and maintain maritime rights; these have become increasingly important, and the task of the naval sector to maintain national sovereignty and maritime rights and interests have become more prominent. Since 2012, due to the deepening sovereignty disputes over the Diaoyu Islands and the South China Sea, China’s patrols to the Diaoyu Islands and the South China Sea have been intensified, and the work intensity of patrol personnel has been increasing. Therefore, it has become an urgent need to develop a new type of ship that is unmanned, can navigate autonomously, and can perform dangerous and tedious tasks by carrying different mission loads instead of manpower. With the rapid development of communication, artificial intelligence and other technologies and application needs, unmanned surface boats have entered a golden period of rapid development. USV can develop rapidly mainly based on two reasons: first, demand traction. The current demand for USV is becoming more and more extensive and in-depth, and the use of USV covers a number of fields such as environmental protection, hydrology, measurement and mapping, security patrol, military, unmanned shipping, etc. Secondly, it is technology-driven. The current technology to promote the development and popularity of USV has been fully matured, including communication technology, control technology, identification technology, sensor technology, deep learning and other technologies which have been continuously developed and applied in all walks of life. With the continuous progress of Transformer technology, intelligent unmanned surface boats will play an increasingly important role in both military and civilian fields in the future [
3]. Although the domestic research on USV started late, it has gradually transitioned from the initial conceptual design stage to the practical application stage at this point. The China Classification Society (CCS) launched the research and preparation of the inspection guide for USV in May 2017 based on the market demand and the demand of intelligent ship technology research and development, and released the first “Inspection Guide for Unmanned Surface Boats” at the end of 2017.
A USV is a ship that can accomplish its assigned tasks on the water surface autonomously without carrying a crew. It has many advantages over other vessels; in shape design, it is small in size and light in weight. It is highly maneuverable and adaptable when driving on the sea surface, faster and more flexible, and can better adapt to the adverse effects caused by sea state disturbances. In addition, it is also able to work in the harsh environment of the sea without manual piloting, with high safety. USVs can be divided into monohulls and catamarans. Compared with monohull boats, catamaran boats have many advantages, mainly in terms of ship stability, construction process, production cost, and failure maintenance of equipment at a later stage [
4].
The United States was the first country to launch high-speed catamarans, and the world’s first high-speed catamaran, “Double Eagle”, was launched in 1967 in the United States. Later, Norway, Sweden, Israel, Canada and other countries conducted a lot of research on high-speed catamarans and produced dozens of different types of high-speed catamarans. Insel and Molland et al. [
5] analyzed the drag components of high-speed catamarans, focusing on the effects of speed and hull spacing on the hydrostatic drag of Wigley catamarans and three types of NPL catamarans. Moraes et al. [
6] considered the effect of shallow water on drag and investigated the emerging wave drag of a high-speed catamaran by using slender ship theory with the 3D software Shipflow. Bouscasse B et al. [
7] conducted an experimental study on the wave resistance of a high-speed catamaran to study the wave resistance of the ship in real sea conditions, and presented the estimation of additional resistance in waves based on the Fourier number, the study of nonlinear effects and the analysis of resistance increase in practical situations. A number of catamarans have been successfully developed and put into service, but published data on model catamarans is still scarce.
The research on high-speed catamarans in China started relatively late, but various new types of vessels designed by China are now in operation. Deng F et al. [
8] proposed an optimized design method about the digital aspect of catamaran based on the analysis of drag performance. Shao F et al. [
9] proposed a form using a combination of T-shaped hydrofoil and wave pressure plate, based on CFD numerical simulation, which aims to optimize the hydrodynamic performance of the catamaran. Sang W [
10] carried out the optimized design and forecast of hydrodynamic performance for a catamaran of the same type in order to design a catamaran gliding boat with good performance. In 2016, the largest domestic catamaran “Ruili 10” was successfully built in China, which uses the very popular electric propulsion system, and in 2017, the largest and most advanced wave-piercing catamaran test vessel was built by Wuhan Shipbuilding Heavy Industry Co. Ltd. The successful launch of this wave-piercing catamaran test vessel marks the development of China’s high-performance ships reaching a new height.
Based on the analysis of the above situation, this article proposes a multifunctional fast UAV-USV coupling system to design a surface Transformer with a catamaran design [
11,
12,
13]. The main cockpit of the 38-foot (11.5 m) long boat is located on a pair of 12-foot (3.6 m) high support pillars that lift the boat out of the water, and at the other end of each support wing is a 62-foot (19 m) long tubular cabin with a forward propeller driven by a 2 k hp gas turbine. These struts are attached to their bases and can be raised and lowered at the touch of a button while underway, allowing the boat to sail at 33 knots even in the face of 8-foot (2.4 m) high waves. When moored or traveling in shallow water, the support column flattens out to the side so the boat can cruise normally. The Transformer can achieve radar stealth, and can stably and efficiently reach the accident scene within a certain time to offer rescue, mainly for patrolling the perimeter of the naval fleet, but also to perform offshore patrols, plan water patrols, carry supplies, perform rapid strikes against enemy targets and other tasks, with strong environmental adaptability, sailing flexibility and other characteristics. The Transformer can carry thousands of pounds of weapons, including Mark 48 torpedoes, in its internal weapons compartment. The USV has a lot of interior space, it can carry a small squad of Special Forces and can travel at a maximum speed of 50 knots. The USV surface adopts new material stealth design, equipped with an advanced control system, sensors and a communication system, which can not only remotely control the whole process, but also conducts autonomous navigation. It can play an important role in the military and civil fields.
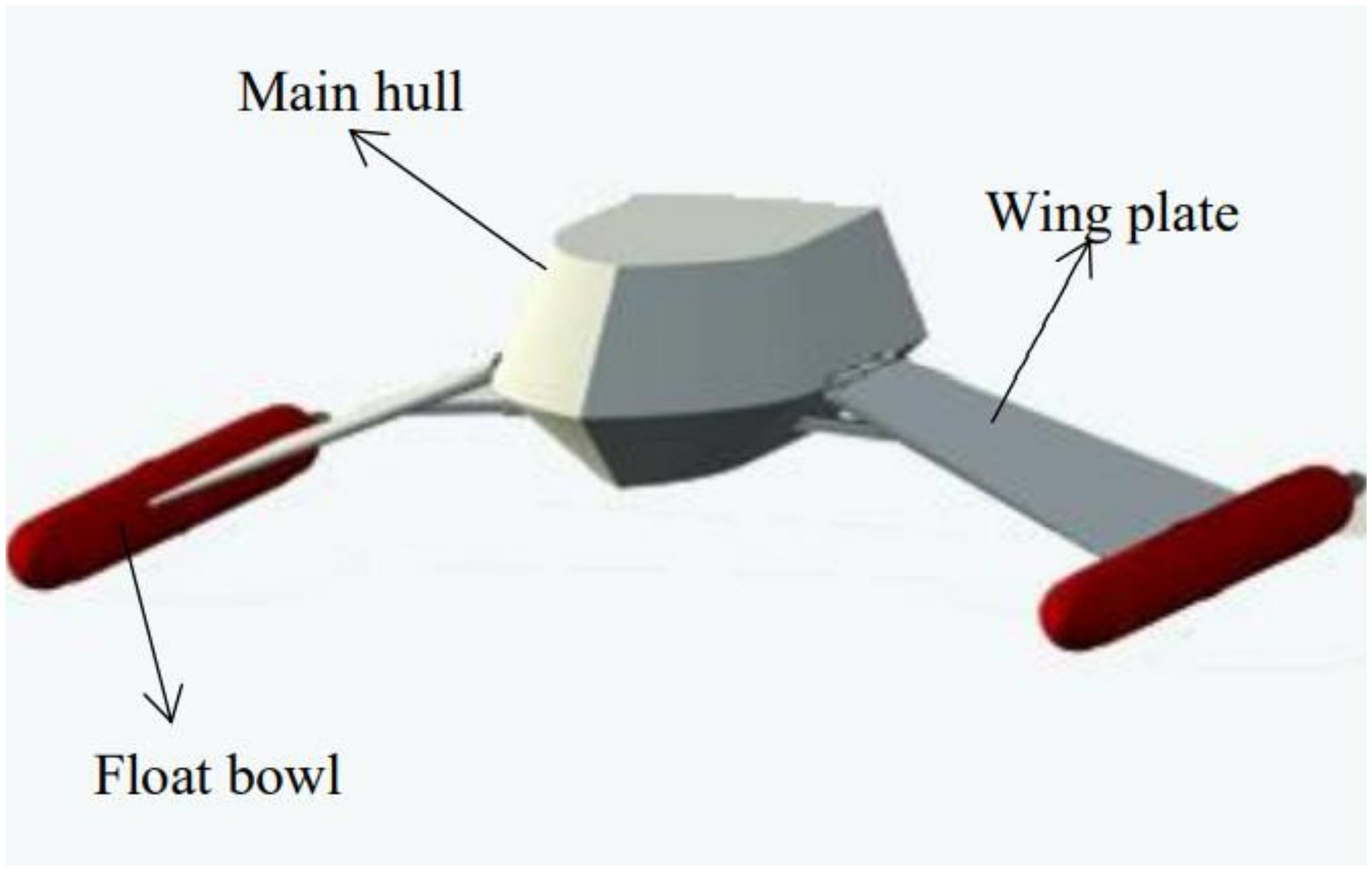
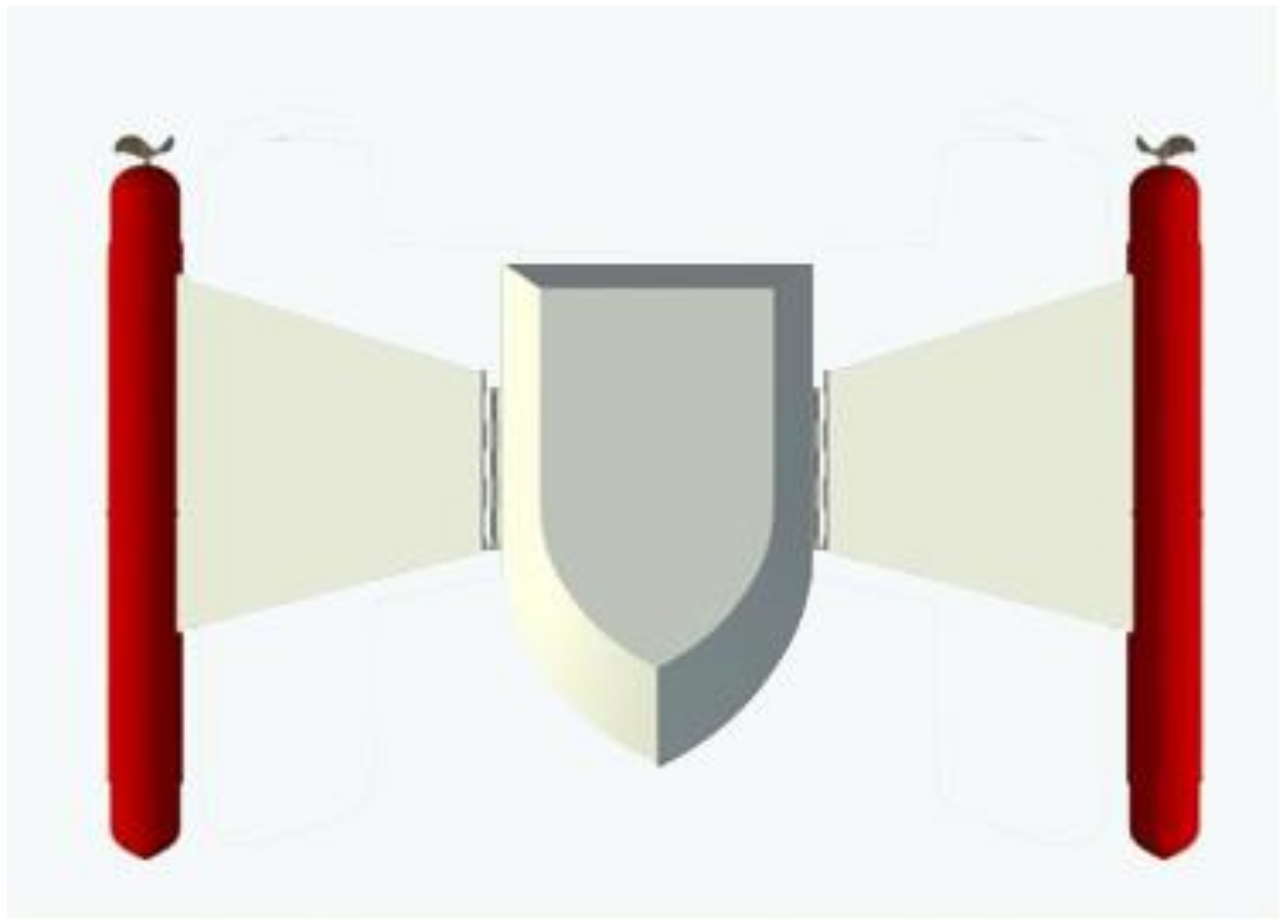
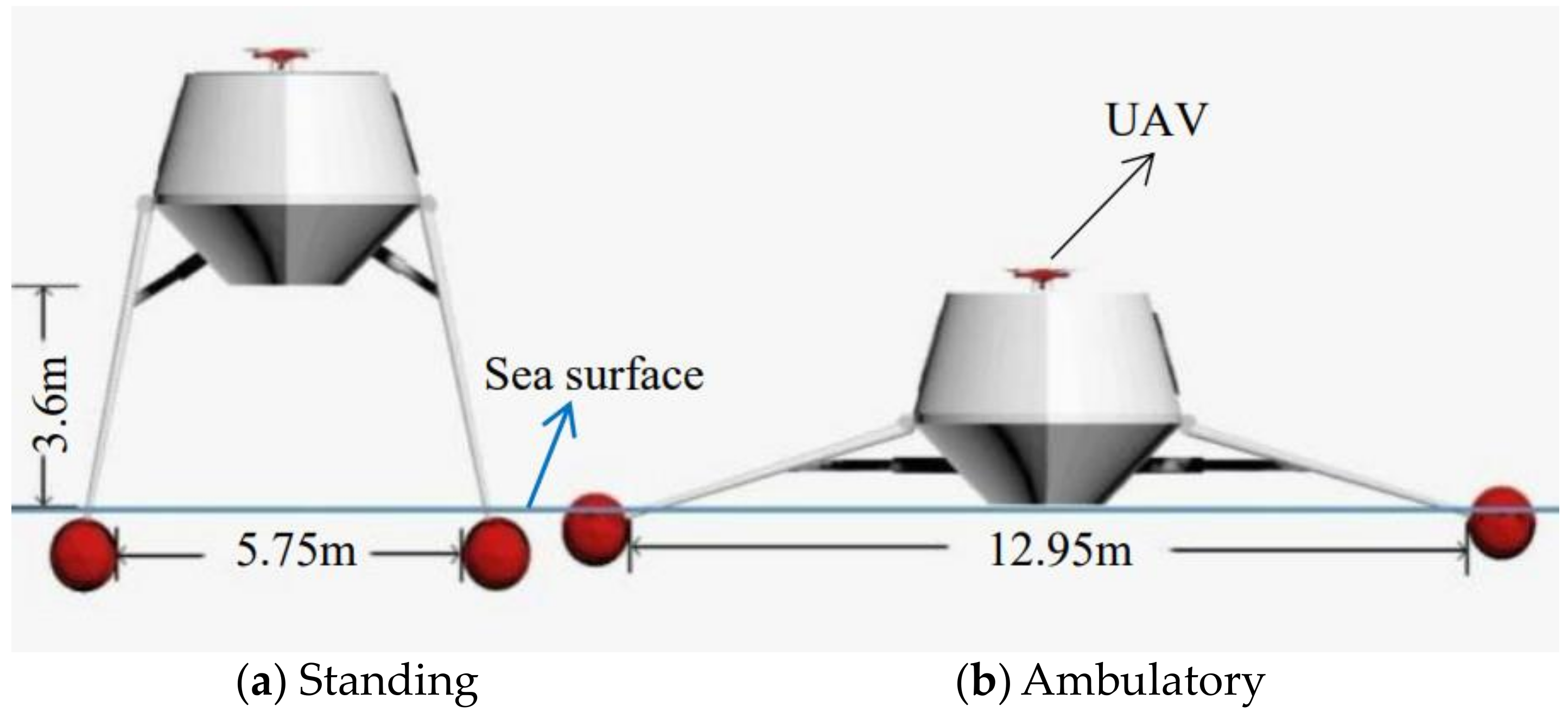
The Transformer has a morphing function that allows you to switch between high-speed mode and morphing mode, combining speed and smoothness. In high-speed mode, the side panels are tucked in to avoid the waves, allowing for a significant increase in speed when sailing in deep water. In deformation mode, the side panels are unfolded and the main hull is close to the water surface, increasing the contact area with the water surface and reducing the speed, lowering the center of gravity to improve stability and reduce the radar reflection area on the water, thus achieving a certain degree of radar stealth.
2. Conceptual Designs
The objective is to design a multifunctional fast UAV-USV coupling system, as shown in
Figure 1. Carrying UAV on board for the Transformer extends its reconnaissance range. A radar stealth material is applied to the surface of the hull after deformation to achieve some radar stealth. Two floats are added to the end of each wing to provide sufficient buoyancy to carry the relevant weaponry inside the floats.
In addition, in order to achieve high speed and stability, a catamaran structure with a deformed structure was used in the design. The hull and the connecting part of the ship were designed as a thin type to minimize the wave resistance. The main hull is designed above the water surface to reduce the contact area with the water, thus reducing frictional resistance. Furthermore, a pivot is provided at the link between the main body and the side wings, so that the side wings can be rotated around the pivot. By adjusting the angle of expansion of both wings, the stability of the ship at high speed is further ensured, and the deformation function enables the ship to sail close to the water surface, which increases the stealth effect with the radar stealth material.
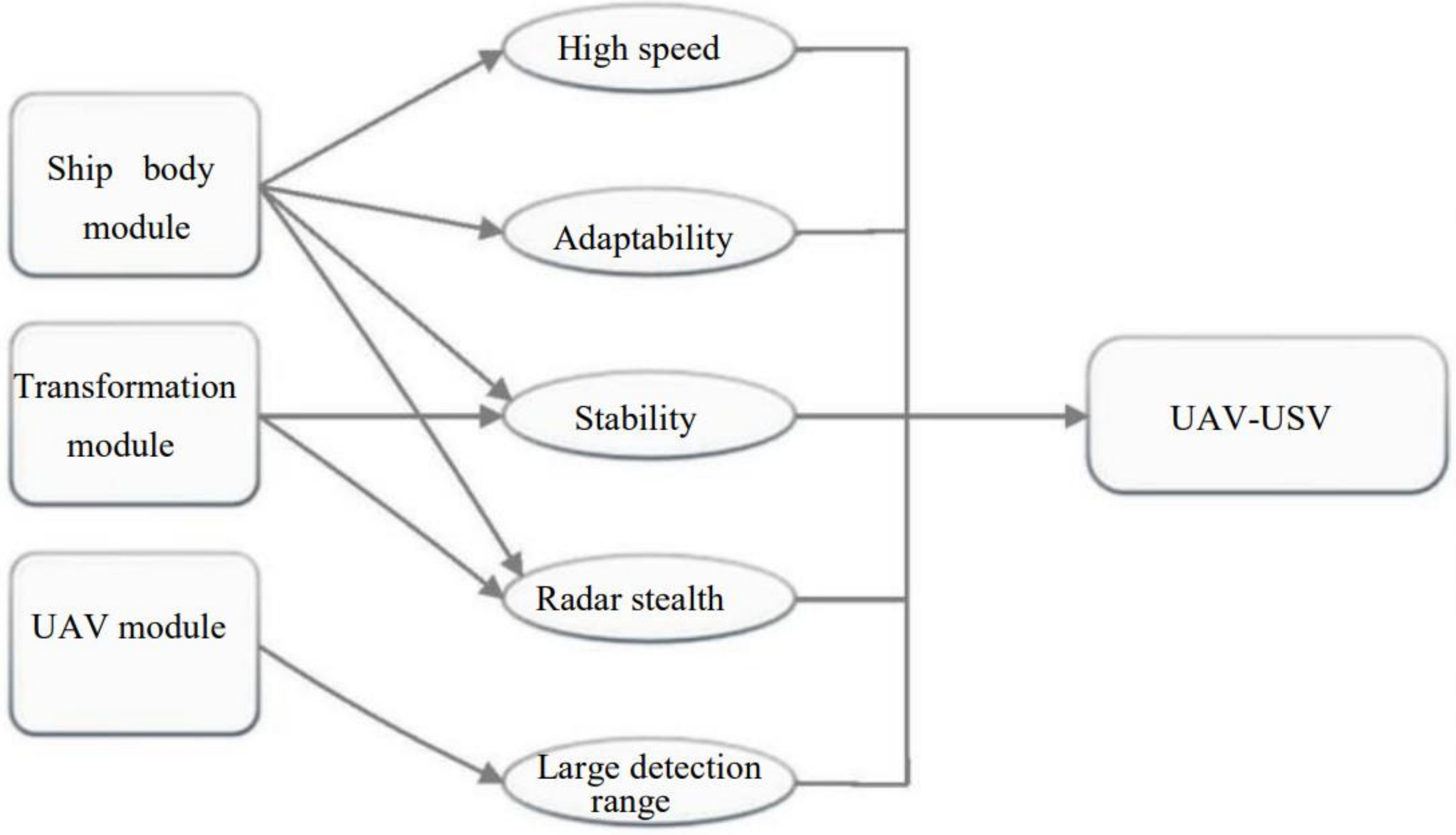
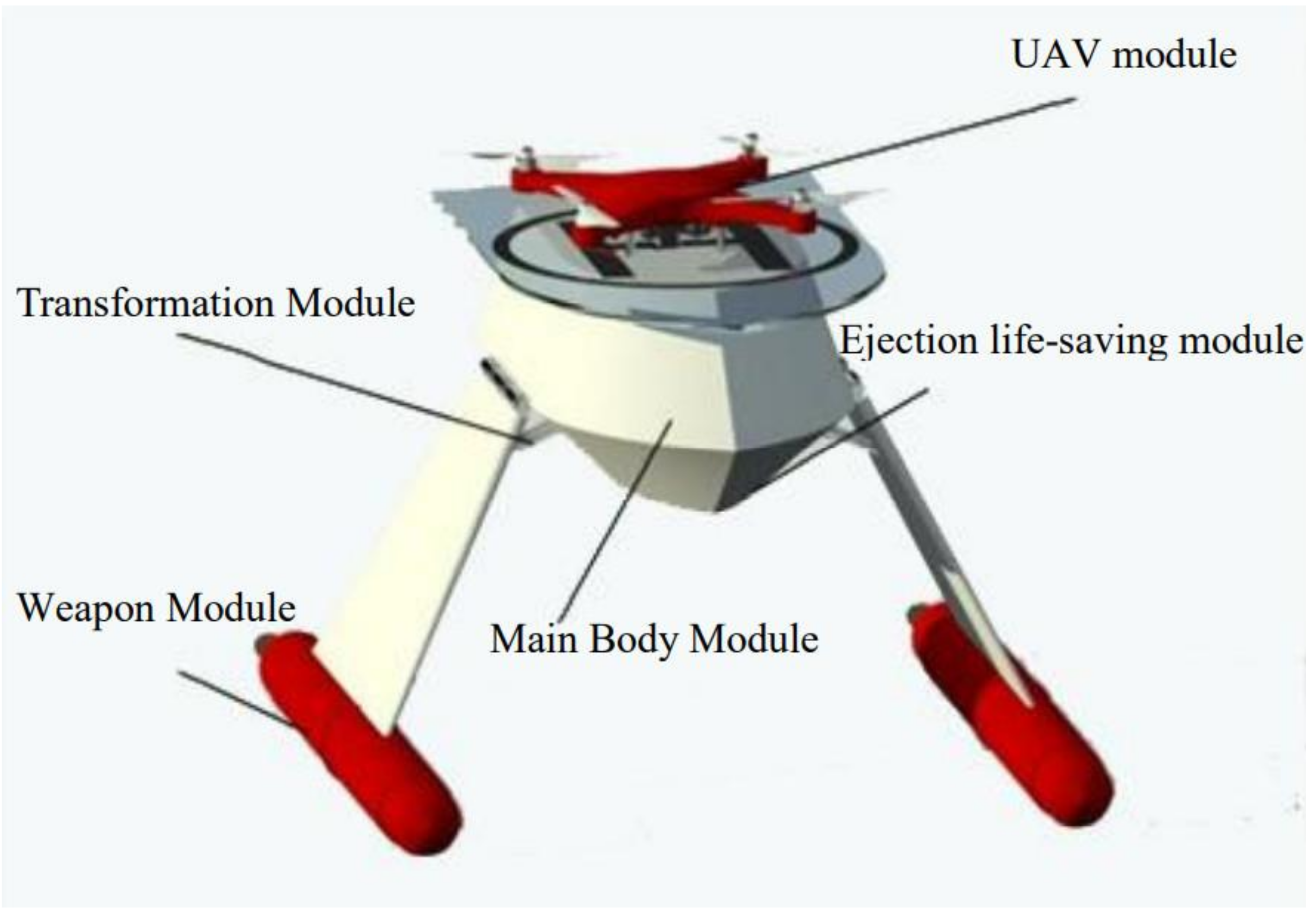
This system adopts a modular design, consisting of the ship body module, the deformation module, the drone module, the weapon module and the ejection rescue module, as shown in
Figure 2. The main module of the ship includes the whole ship and the radar stealth material painted on the surface of the ship. The deformation module can control the deployment or retraction of both wings to ensure the radar stealth of the ship and the stability of the ship at high speed. The UAV module enables the system to have a larger cruising detection range and to reconnoiter places that are inaccessible or dangerous to the ship.
This system combines the ship body module, the deformation module, the UAV module, the weapon module and the ejection life-saving module together, so that the UAV has the characteristics of stability, speed, radar stealth and high load, which can be used for both military and civilian purposes. For military use, it can carry out military tasks such as enemy reconnaissance and target strikes with the appropriate equipment on board. For civilian use, it can quickly reach the scene in the event of a maritime accident to rescue people overboard, and can be used to explore some highly dangerous areas of the sea as well.
4. Performance Analysis
4.1. Boat Resistance Analysis
VOF is a numerical technique historically used to track and localize the free surface flow of only one fluid, and now is often used for multiphase fluid flows. It belongs to the class of Eulerian methods characterized by the fact that the grid is stationary or moves in some prescribed way to accommodate the evolving shape of the interface. In the VOF method, the marker function is represented by a fraction of the computational grid cells occupied by the fluid assumed to be the reference phase [
18,
19]. Currently, computational fluid dynamics (CFD) is widely used. In numerical simulations using computational fluid dynamics methods, it is necessary to discretize (generate meshes) the computational region using effective mesh discretization methods. The speed and quality of mesh generation largely determine the time consumption, accuracy and stability of the computation. According to the relevant research statistics, the time of mesh generation accounts for about 60% of the total computational time when using CFD to solute the fluid problems [
20].
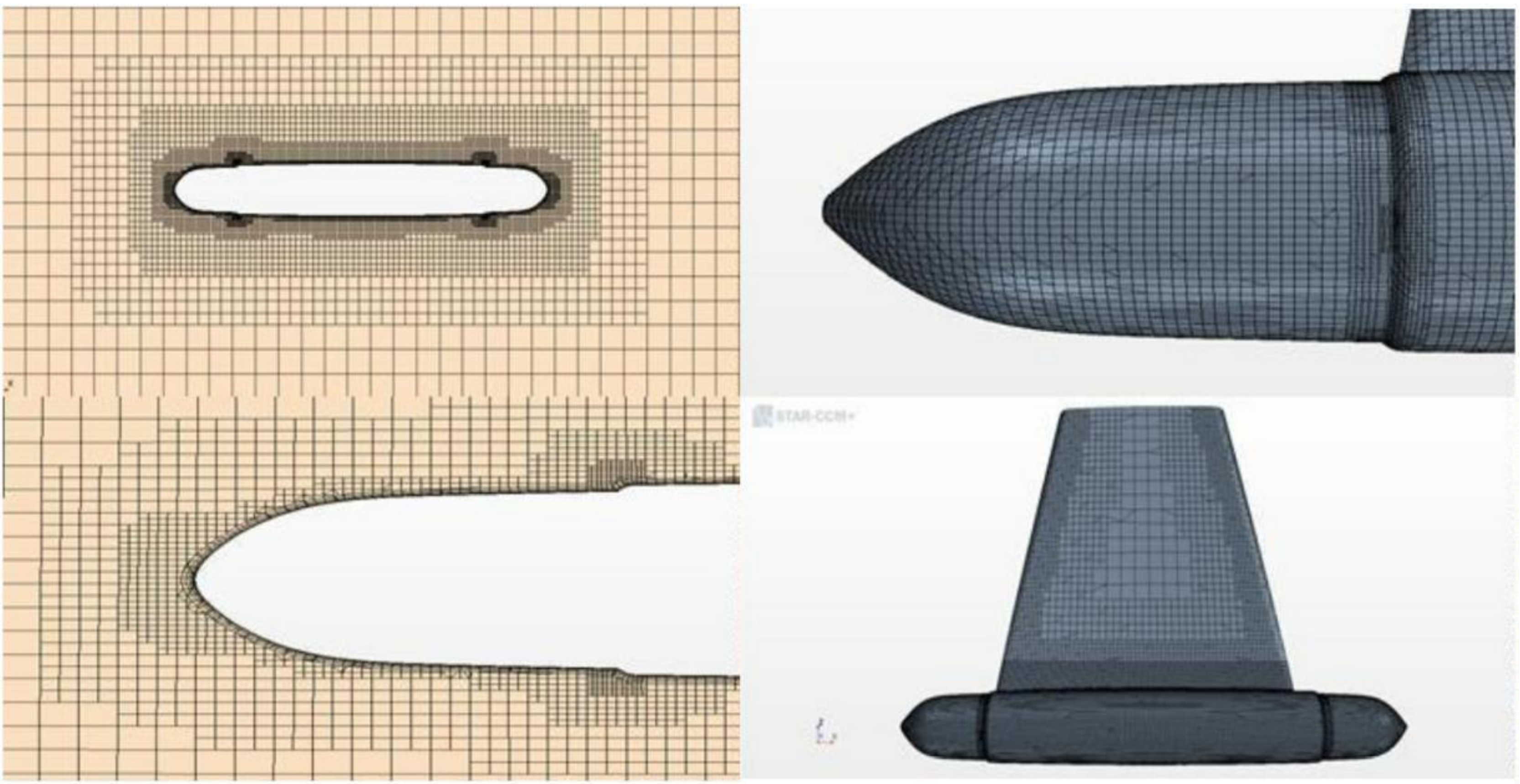
The overall structural model of the Transformer is first made using Solidworks, and then imported into the continuum media mechanics numerical software STAR-CCM+. The CFD model is established by imposing the corresponding wave flow conditions, and the VOF method is used to solve and analyze the CFD problem with free liquid surface, and then test the stability of the Transformer structure, and the computational accuracy is divided as shown in
Figure 24.
The total resistance of a ship during navigation is divided into the above-water part resistance and the underwater part resistance. The above-water resistance is air resistance, while the underwater resistance is friction resistance, wave-making resistance and viscous pressure resistance.
The current practice of calculating the resistance of a ship is to divide the total resistance Rt into three parts: frictional resistance Rf, viscous pressure resistance Rpv and wave-making resistance Rw. That is, Rt = Rf + Rpv+ Rw, where Rf is calculated using a fairly flat plate, and Rpv and Rw are the residual resistance, which is converted using a similar comparison rate. For low speed boats, frictional resistance accounts for about 70% to 80% of the total resistance, viscous pressure resistance accounts for more than 10%, and wave resistance is very small. However, as for the Transformer, the velocity is high and the wave resistance will increase sharply, reaching 40% to 50% of the total resistance. Therefore, reducing the frictional resistance and wave resistance can greatly improve the ship speed.
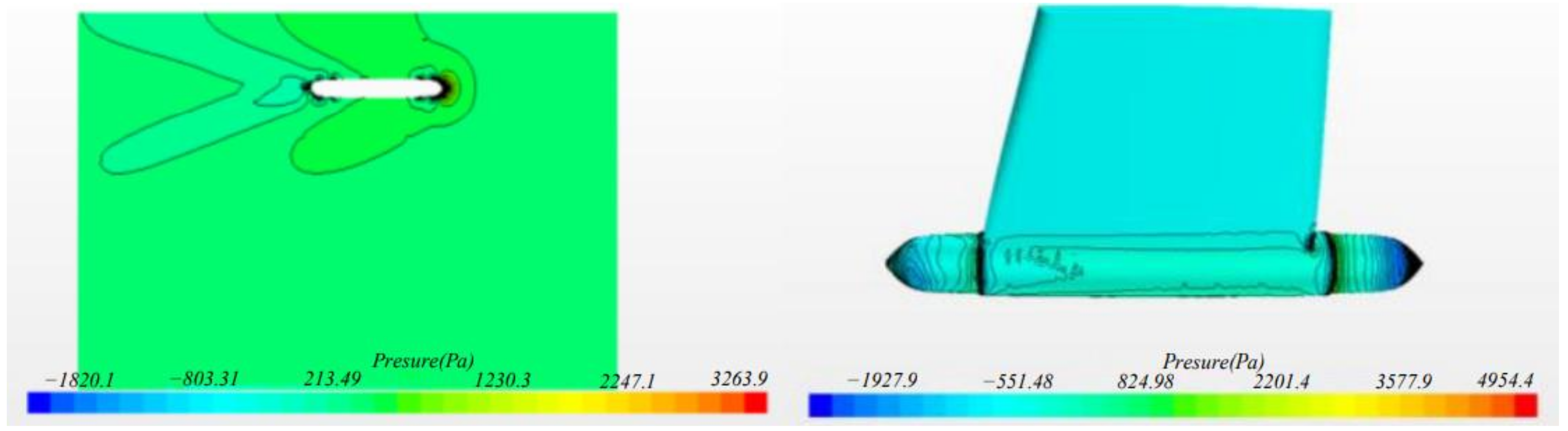
The distribution of wave-making resistance is related to the position of the ship, which is different from the frictional resistance. The wave-making resistance is sensitive to the ship’s shape line, and the change of the ship’s shape line can obviously reduce the wave-making resistance. Through simulation calculation, the dynamic wave resistance distribution of this unmanned vehicle can be obtained. As shown in
Figure 25, two maximum pressure zones are formed near the two stagnation points of the hull head and tail, and their wave-generating effect is the strongest; the closer it gets to the ship, the less obvious it is.
The distribution of wave resistance is related to the position of the hull. Different from the frictional resistance, the wave resistance is sensitive to the shape line of the ship, and the proper change of the shape line can obviously reduce the wave resistance. The distribution of the wave resistance when the Transformer is moving is shown in
Figure 25, where, the total number of elements is 136524. Two maximum pressure zones are formed near the two stagnation points of the hull head and tail. On maximum pressure zones, wave-generating effect is the strongest, and the effect on the place near the middle position of the hull will be not obvious. Where velocity of the unmanned surface vehicle relative to water is 0.9 m/s, Froude’s number is 0.259.
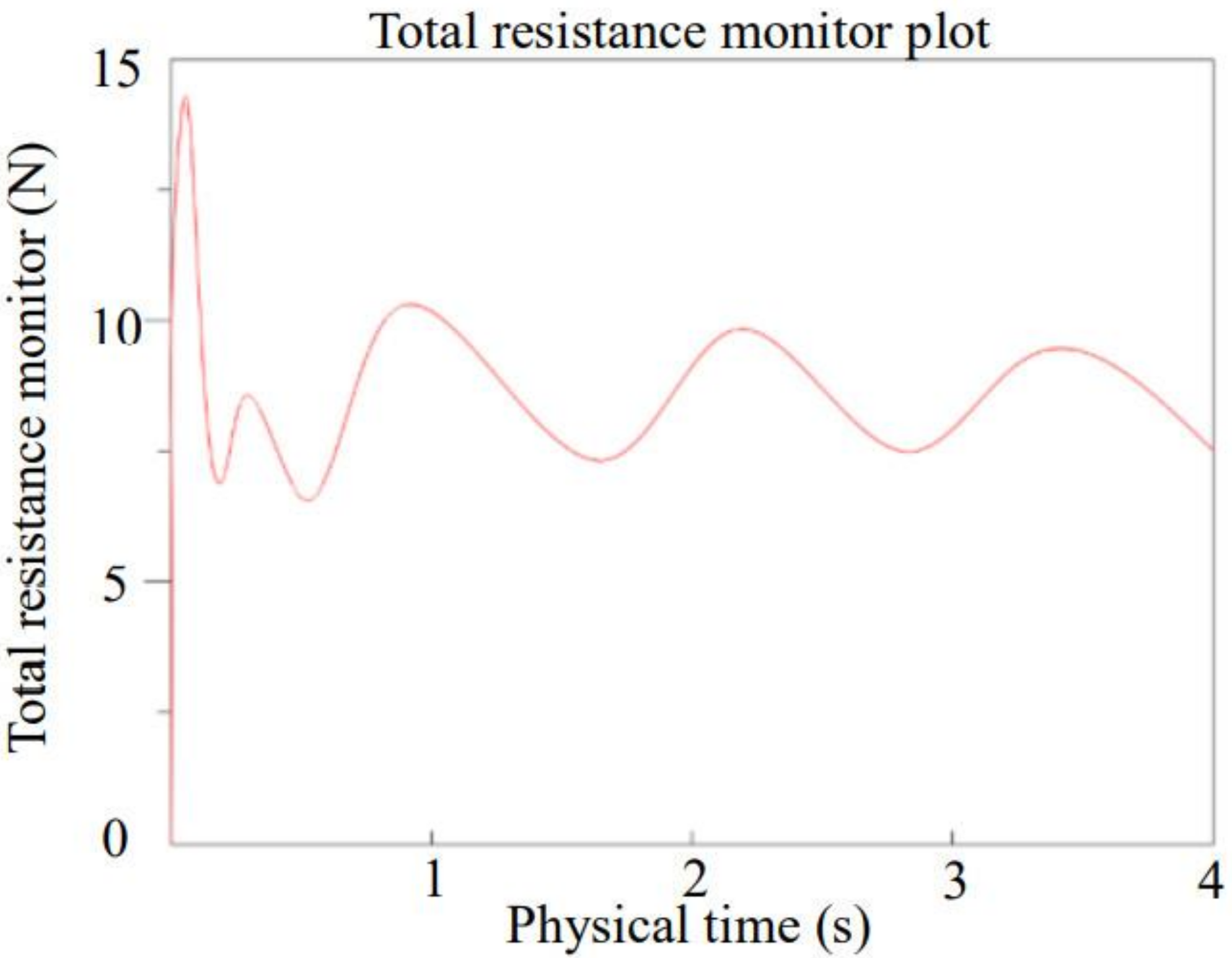
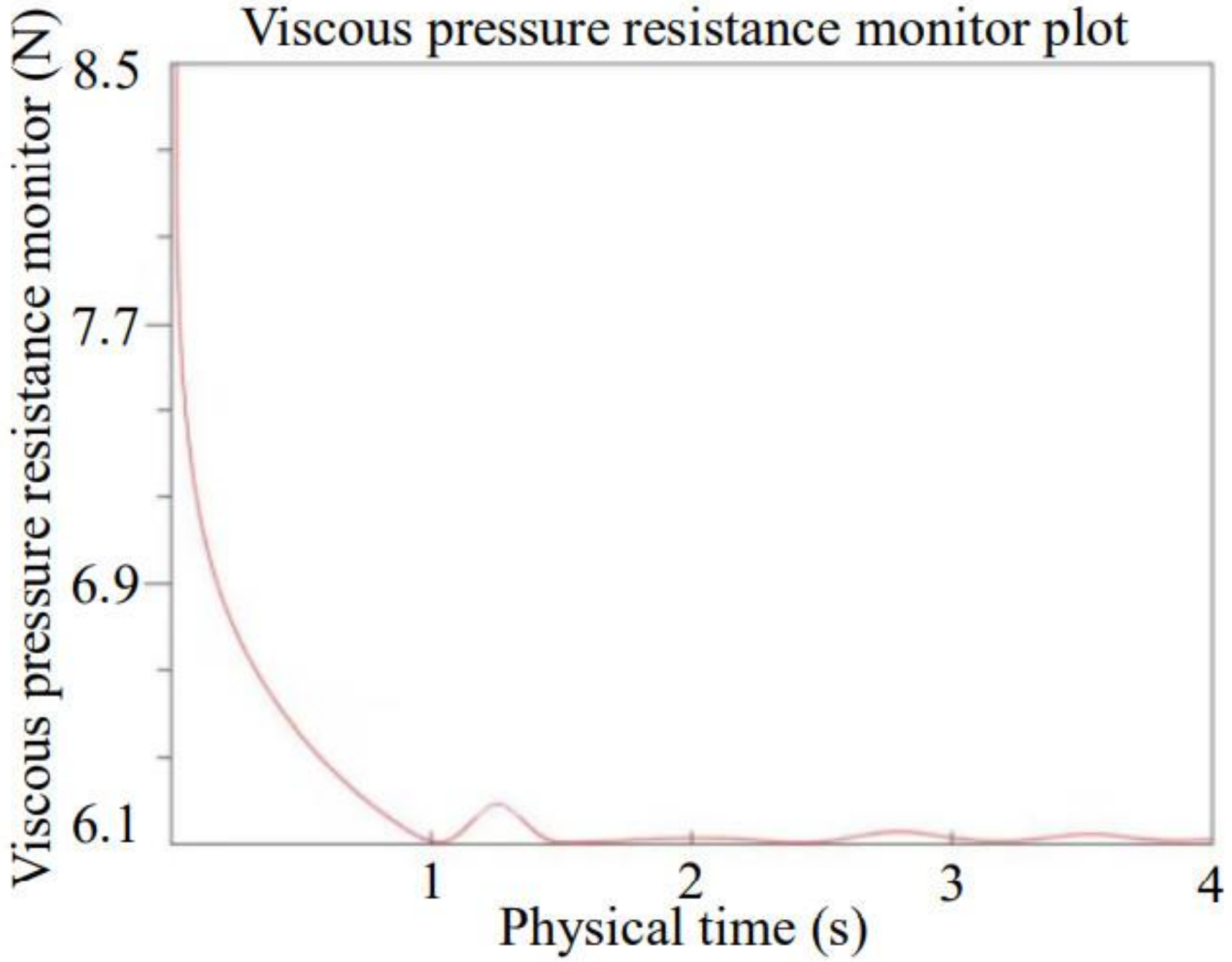
The results of the total resistance and viscous pressure resistance analysis are shown in
Figure 26 and
Figure 27, respectively. The simulation calculation shows that the total resistance of the ship is about 13.4492 N and the viscous pressure resistance is about 6.1870 N, which shows that the wave resistance accounts for about 46% of the total resistance in this ship.
4.2. Wireless Charging Analysis
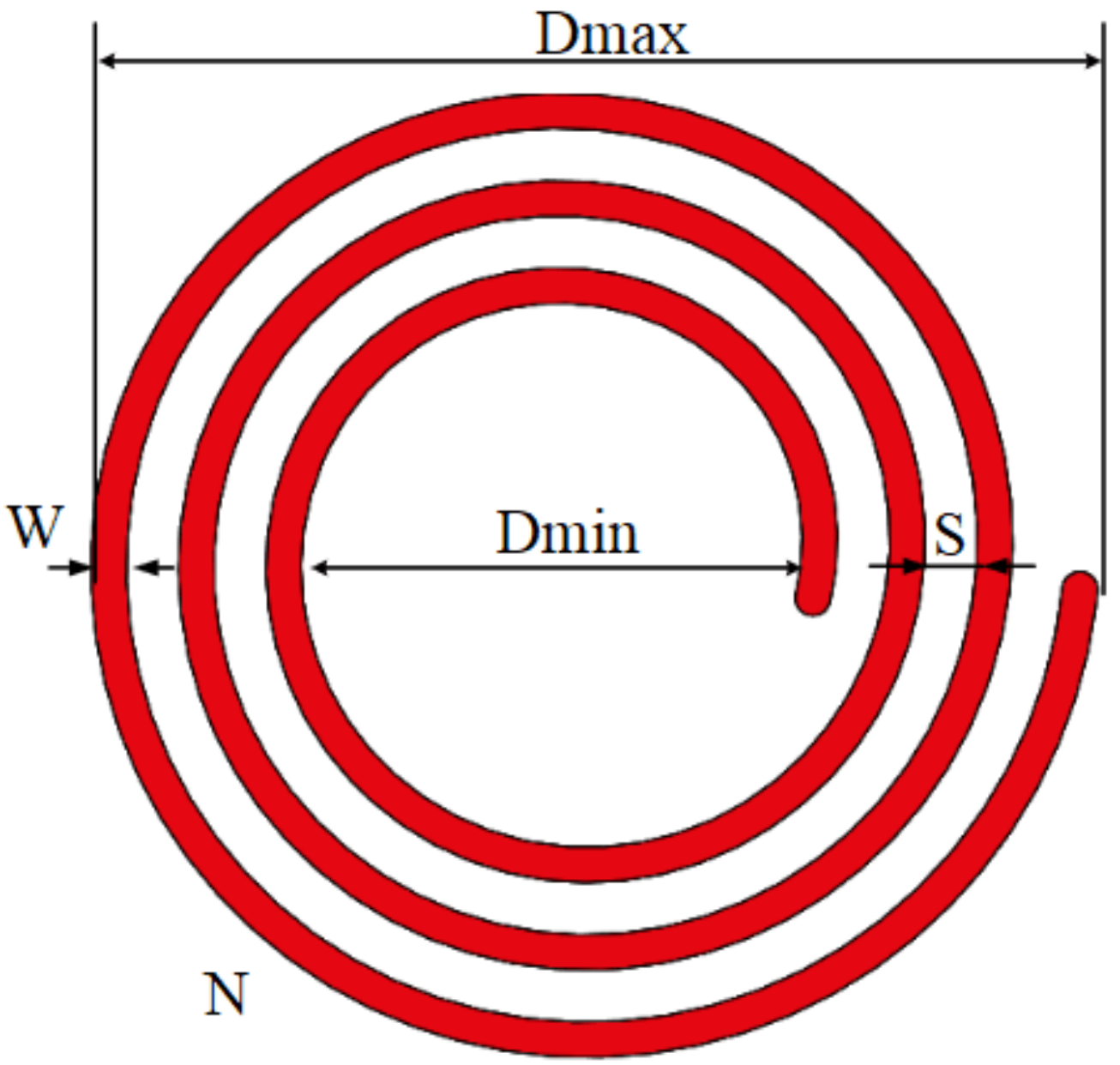
The coil charging efficiency is related to the coil parameters, the voltage and current parameters of the buck regulator module, and the distance between the coils. The coil parameters include the outer diameter, inner diameter and number of turns of the coil. To facilitate the design, we only optimize the number of turns of the coil and test the designed charging coil to determine the optimum charging distance.
4.2.1. Theoretical Models
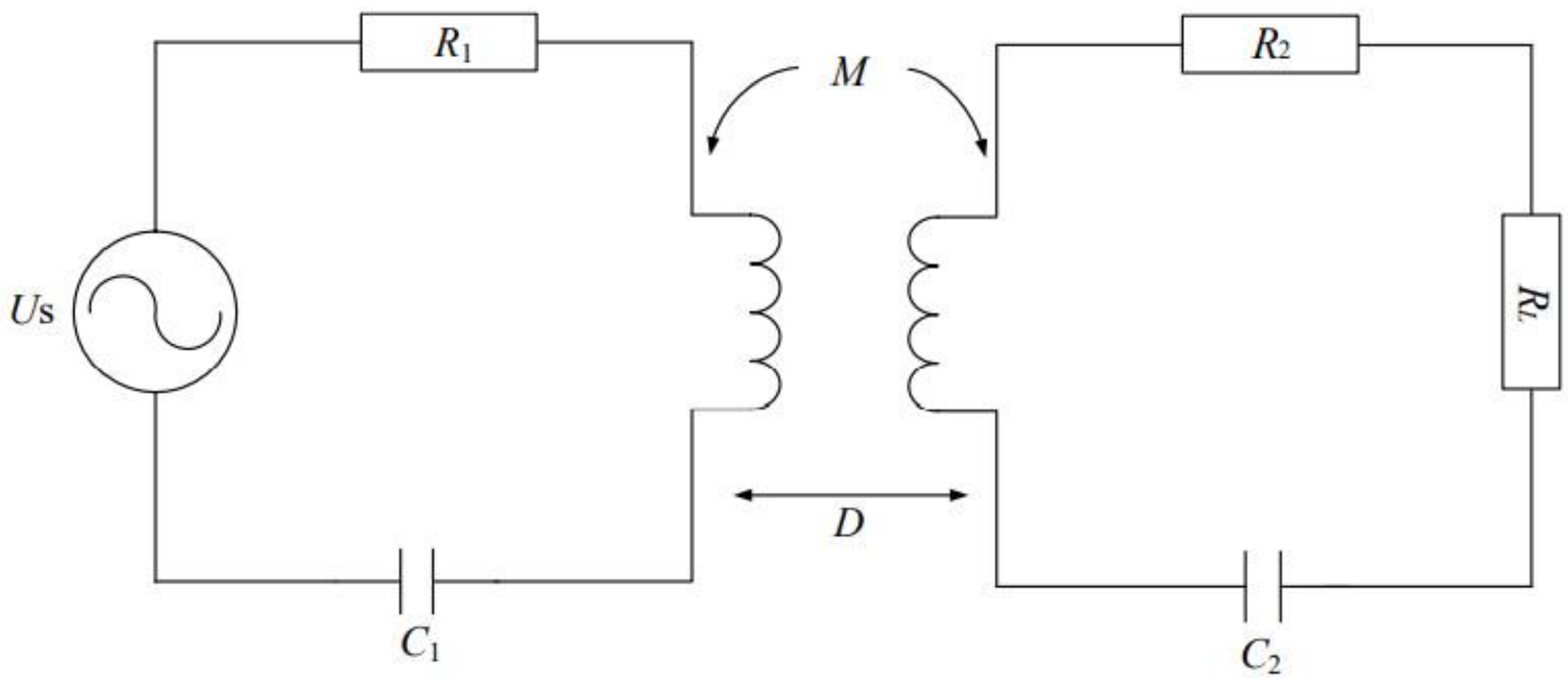
The magnetically coupled resonant wireless charging system mainly consists of four parts: the high frequency power supply, the transmitting coil, the receiving coil and the load (the UAV battery). A magnetically coupled resonant circuit model is shown in
Figure 28.
Where
US is the power supply,
RL is the equivalent load converted to the receiving coil side by inductive coupling,
C1 and
C2 are the capacitance, which represents the coil distance, and
M is the mutual inductance between the coils. The charging efficiency of magnetically coupled resonant wireless charging systems is:
where
is the transmission efficiency,
is the transmission system angular frequency,
N1 and
N2 are the number of turns of the transmitting (receiving) coil, and
r1avg and
r2avg are the average radius of the transmitting (receiving) coil.
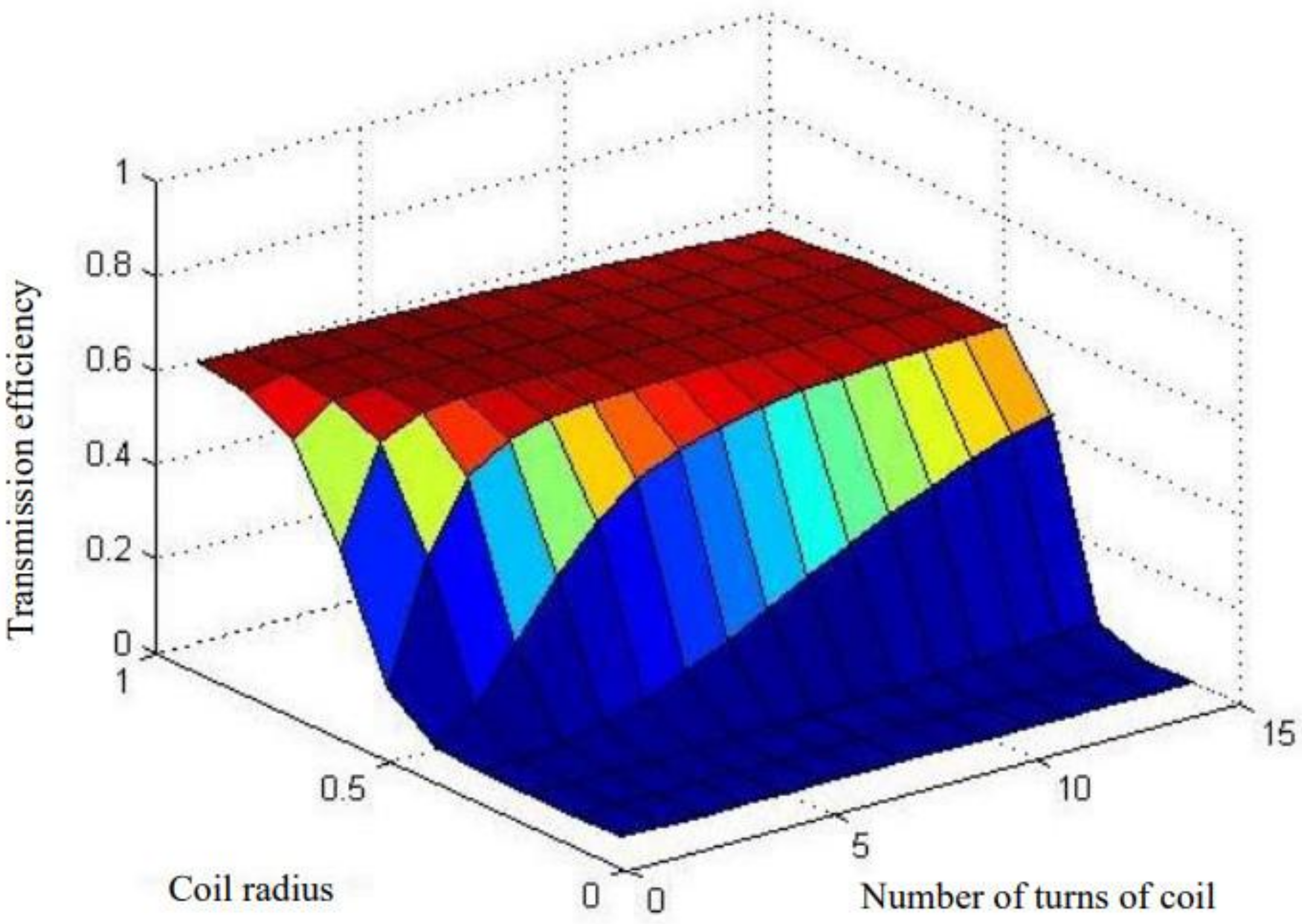
4.2.2. Optimization of the Number of Turns in the Coil
Under the conditions of
f = 0.5 MHz,
US = 36 V,
D = 0.02 m, selection of copper wire as material, coil winding guide wire diameter according to the maximum current value that the wire can withstand is taken as 1 mm. The platform range is 1 m long and 1 m wide. Taken
ravg = 0.1~1 m, N = 1~15. Based on the above equations and through Matlab simulation,
Figure 29 and
Table 2 can be obtained.
From
Table 2 and
Figure 29, it can be seen that the maximum transmission efficiency is achieved when the number of turns of the coil is 8 or 9. Considering that increasing the number of turns will reduce the transmission power, the number of turns of the coil is taken to be 8, and the simulation transmission efficiency is 58.5% at this time.
4.2.3. Determination of the Charging Distance
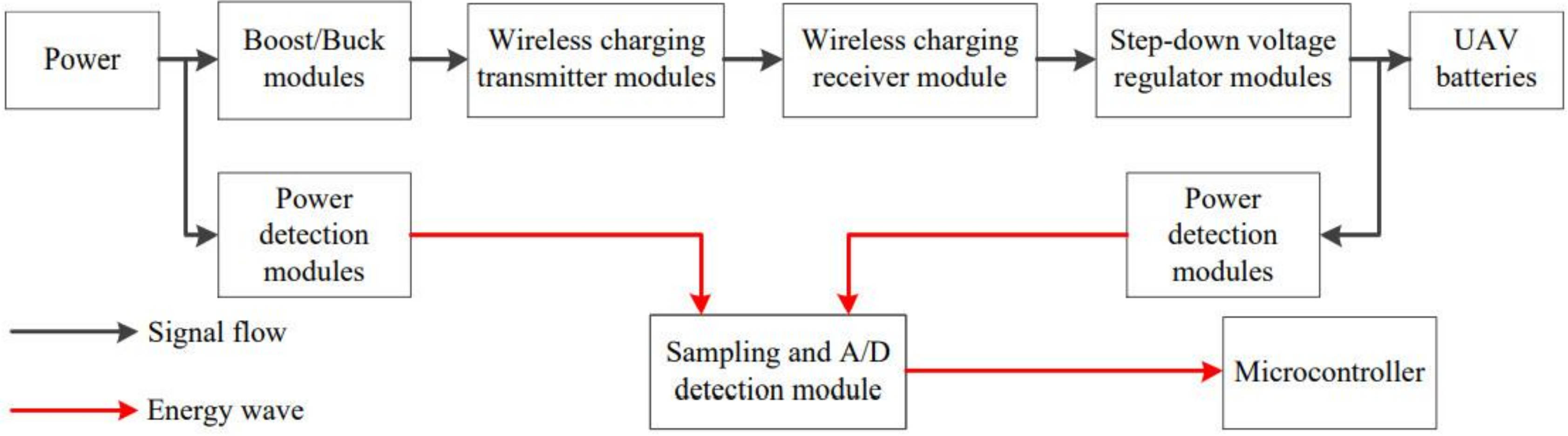
The power detection circuit is designed to test the charging power of the UAV. It can calculate the charging efficiency of the UAV under actual conditions, and test the charging efficiency of the UAV at different inter-coil distances, and then determine the optimal charging distance. The specific process of the experimental test is shown in
Figure 30.
MAX4211 is a dedicated power detection chip. A sampling resistor of small resistance value is connected in series between the power supply and the load, and the inflow current is found by taking the voltage difference between the two ends of the sampling resistor. After collecting the input DC voltage, the product of the two is the input power. After deriving the input power output and power proportional to the signal, the signal can be sent by the microcontroller detection.
The power detection module equipped with MAX4211 is connected to the power output and the battery input of the UAV, respectively, so that the real-time power of the power output and the UAV charging can be measured. The power signal output from MAX4211 is transmitted to the high-precision 16-bit AD converter chip ADS1118 for power sampling and AD conversion, converted to Single Chip to receive and store the converted power signal, and sent to the host computer through the serial port. The host computer fits the power curve to the sampled power points through the software, and the UAV battery input power is divided by the power supply output power to get the UAV charging efficiency.
By varying the distance between the coils, the charging efficiency at different distances is derived as shown in
Figure 31.
As can be seen from the diagram, the charging efficiency is highest when the distance between the coils is 4 cm. Therefore, we fixed the receiving coil at a position of 4 cm from the bottom of the drone.
According to wireless charging analysis, the receiving coil cloud should be fixed at a position of 4 cm from the bottom of the drone to improve the charging efficiency and insure the operation of UAV.
4.3. Ship Load-Bearing and Stability Analysis
4.3.1. Calculation of the Center of Gravity and Floating Center
In order to ensure the stable operation of the surface rescue drone, a certain height of stability of the center of gravity should be maintained. To this end, the center of gravity and the floating center of the surface rescue drone should be located separately according to the general arrangement, i.e., the center of gravity and the floating center of each part should be listed separately on the general arrangement diagram. The mass and center of gravity of the Transformer are shown in
Table 3.
Where, Pi is the weight of the heavy load on the Transformer, xi, yi and zi are the coordinates of the center of gravity of Pi, xg is the longitudinal coordinate of the center of gravity of the Transformer, yg is the lateral coordinate of the center of gravity of the Transformer, zg is the vertical coordinate of the center of gravity of the Transformer, AW is the waterline area, d is the corresponding draught, xb is the longitudinal coordinate of the center of gravity of the Transformer, yb is the lateral coordinate of the center of gravity of the Transformer, zb is the vertical coordinate of the center of gravity of the Transformer, and V is the volume of drainage.
From Equations (6)–(8), the position of the center of gravity for the Transformer is obtained: xg = 0.601, yg = 0, zg = 0.167.
From Equations (9)–(11), the floating center position of the Transformer is obtained: xb = 0.614, yb = 0, zb = 0.215. When the height of the floating center is higher than the gravity center, the Transformer can voyage stably.
The height of initial stability, i.e., the height of the stable center, can be expressed as: h = zb + r − zg = zm − zg = 0.013.
In this equation,
r is the radius of the transverse stability center,
zm is the height of the transverse stability center from the baseline.
Ixf is the area moment of inertia of the positive floating waterline WL area against the cross-tilt axis xf through the drift center F.
In order to maintain the balance of the Transformer during rescue, there should be:
If
,
, the general arrangement of the Transformer should be adjusted, although not absolutely equal, so that:
where
is the longitudinal inclination angle of the range of 0°~15°, with the data obtained as
.
4.3.2. Load-Bearing Analysis
Determining the mass and displacement volume of a surface rescue drone is one of the main tasks of design. When designing a surface rescue UAV, the aim is always to minimize the mass while achieving the main performance [
21]. It is assumed that the masses and float volumes of the main components of the USV are as shown in
Table 4.
Since the payload is all contained within the shell,
Vu = 0, if the relative weight of each major component is expressed separately by
, then:
In order to ensure the balance of the surface rescue drone in the water, the equation should satisfy
W = γV, where
is the specific gravity of seawater, and
From Equation (16) and Equation (19) the following can be obtained:
It can be seen from Equation (20), for the surface rescue Transformer with floating body material, when a certain group of relative specific gravity is smaller than the relative specific gravity of floating body material, will become negative. At this time, increasing the mass of will not only increase the displacement of the Transformer, but will also make the displacement decrease.
4.4. Detection Distance Analysis
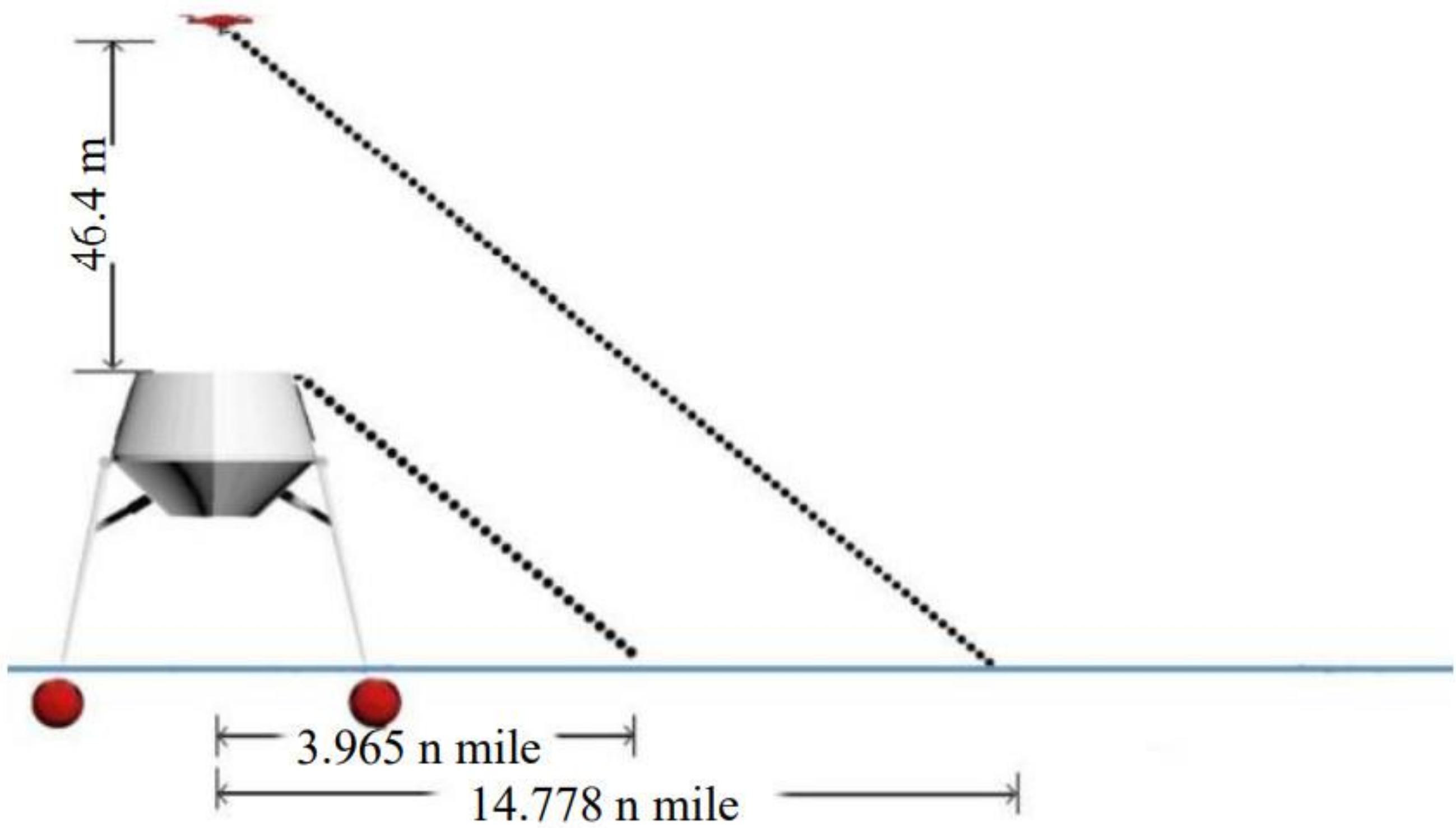
In nautical science, when the eye height of the surveyor is zero, the theoretical maximum distance that the surveyor can see the object (geographical visibility distance) in good visibility is given by the following formula:
where
H is the height of the vertex of the objective from sea level (m),
USV detection distance is:
, and UAV detection distance is:
, the USV carrying the UAV can increase the sight distance of the system, shown in
Figure 32.
According to detection distance analysis, the detection scope of the Transformer is much larger than the normal detection ship, and it improves the detection efficiency.
5. Conclusions
This article adopts modular design, research and development of a deformable catamaran. The ship body module, the deformation module and the UAV module of the catamaran are designed and analyzed separately, and the sailing resistance before and after deformation is simulated. Simulation experiments have shown that the catamaran can be driven at high speed in a standing position avoiding heavy winds and waves. The deformation lowers the center of gravity and increases drag due to the contact between the main hull and the water surface, balancing speed and smoothness. The Transformer increases the visibility distance by carrying the UAV, facilitating cruise search and rescue, and simulates and optimizes the number of turns of the UAV’s charging coil. Finally, a physical model is produced and the effectiveness and feasibility of the system is verified through experiments. With its stability, speed and wide cruising range, the system can reach the target scene in a very short time to rescue people overboard in the event of an accident at sea, and can also be used to explore more dangerous areas. When there are more people in the water or the sea area to be explored is large, the whole formation can be deployed to maximize efficiency through coordinated control. In a future networked battlefield environment, the operational effectiveness of a single USV platform will be extremely limited. In this context, the traditional “platform-centric” operational model is gradually changing to become a “network-centric” multi-ship collaborative operational model; accordingly, the Transformer can perform complex tasks that cannot be accomplished by a single platform through multi-boat collaboration.





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}