1. Introduction
In the context of controlling linear time varying (LTV) systems, one of the most common approaches is adaptive control. This is due to the nature of these type of controllers, as they are capable of adjusting their parameters to cope of with the variations in the system to be controlled. Adaptive control techniques for LTV systems are not new and this problem has received great research efforts. A model reference adaptive control (MRAC) scheme is proposed in [
1,
2], while in [
3,
4], indirect adaptive schemes are considered for the case of slowly varying systems. In [
5], an indirect adaptive pole placement is proposed for LTV systems with unmodeled dynamics and bounded disturbance. A linear periodic controller is presented in [
6], where instead of estimating the plant and controller parameters, the ideal control signal is directly computed. In [
7], an adaptive output feedback based controller is addressed, having a fixed structure that depends on the relative degree of the plant.
All of the aforementioned approaches rely on the presence of a model for the plant, or at least some sort of description for its dynamics and structure. In many control applications, deriving a mathematical representation for the plant to be controlled may not be an easy task, as the dynamics of the system may be too complex and may require extensive efforts in order to find a suitable model. For this reason, in recent years, designing feedback controllers from input-output data, collected experimentally from the plant, has gained increasing interest from the control community. This approach is referred to as data-driven control (DDC).
In the literature we can find several contributions addressing the design of data-driven controllers, e.g., iterative feedback tuning (IFT) [
8], virtual reference feedback tuning (VRFT) [
9,
10], correlation based tuning (CbT) [
11], unfalsified control [
12], and a parametrized data-dependent linear matrix inequalities (LMIs) approach [
13]. The interested reader can find further details on DDC methods in the survey paper [
14] and the book [
15]. More recently, a method to compute the inverse of the ideal controller from data collected from the plant is proposed in [
16] through a prediction error approach. The controller structure consists of two parts, fixed and identifiable, which allows the possibility of different controller designs, which can be either model-based or direct data-driven. In [
17], we can find a neural-network (NN) model-free VRFT-based adaptive actor-critic (AAC) scheme. The VRFT approach is used to compute an initial stabilizing NN feedback controller, which is then used to initialize the AAC learning controller tracking the output of a reference model. Starting from the work presented in [
18,
19], a data-driven model-reference approach is presented in [
20] using frequency domain data with the aim of avoiding unmodelled dynamics. In [
21], a DDC approach for tuning a PID controller through iterative feedback tuning for a rotational microscope stage system is presented. A robust data-driven model predictive control is proposed in [
22] for LTI systems. A novel non-iterative DDC scheme for LTI systems is introduced in [
23]. The problem is formulated in terms of set-membership (SM) error-in-variables (EIV) identification in the presence of bounded noise. The approach is extended to the case of non-minimum phase (NMP) plants in [
24], where the authors propose an algorithm which guarantees internal stability of the closed-loop system.
In this paper, we propose an adaptive DDC scheme for controlling LTV systems when the output of the closed-loop system is affected by bounded noise. To the author’s best knowledge, this is the first attempt to address such problem. The controller parameters are estimated in real-time, using measurements collected from the plant at time instant
t, and the parameters computed at the previous time instant. Through set-membership identification techniques, a model-matching scheme is presented, where the controller is designed such that the behaviour of the closed-loop system matches that of a given a reference model. Since the plant is assumed to be completely unknown, and as a result we can not have any information about the structure of the controller and how its parameters vary, we first provide a formulation for bounding these variations. Following that we use recent results presented in [
25] to compute the parameters of the controller by solving a suitable linear program at each time step.
The paper is organized as follows.
Section 2 is devoted to the problem formulation. In
Section 3, we address the adaptive DDC design procedure for LTV systems through set-membership identification techniques. The problem for computing a single point controller is presented in
Section 4 by characterizing the variation bounds on the controller parameters. A convex relaxation approach is proposed in
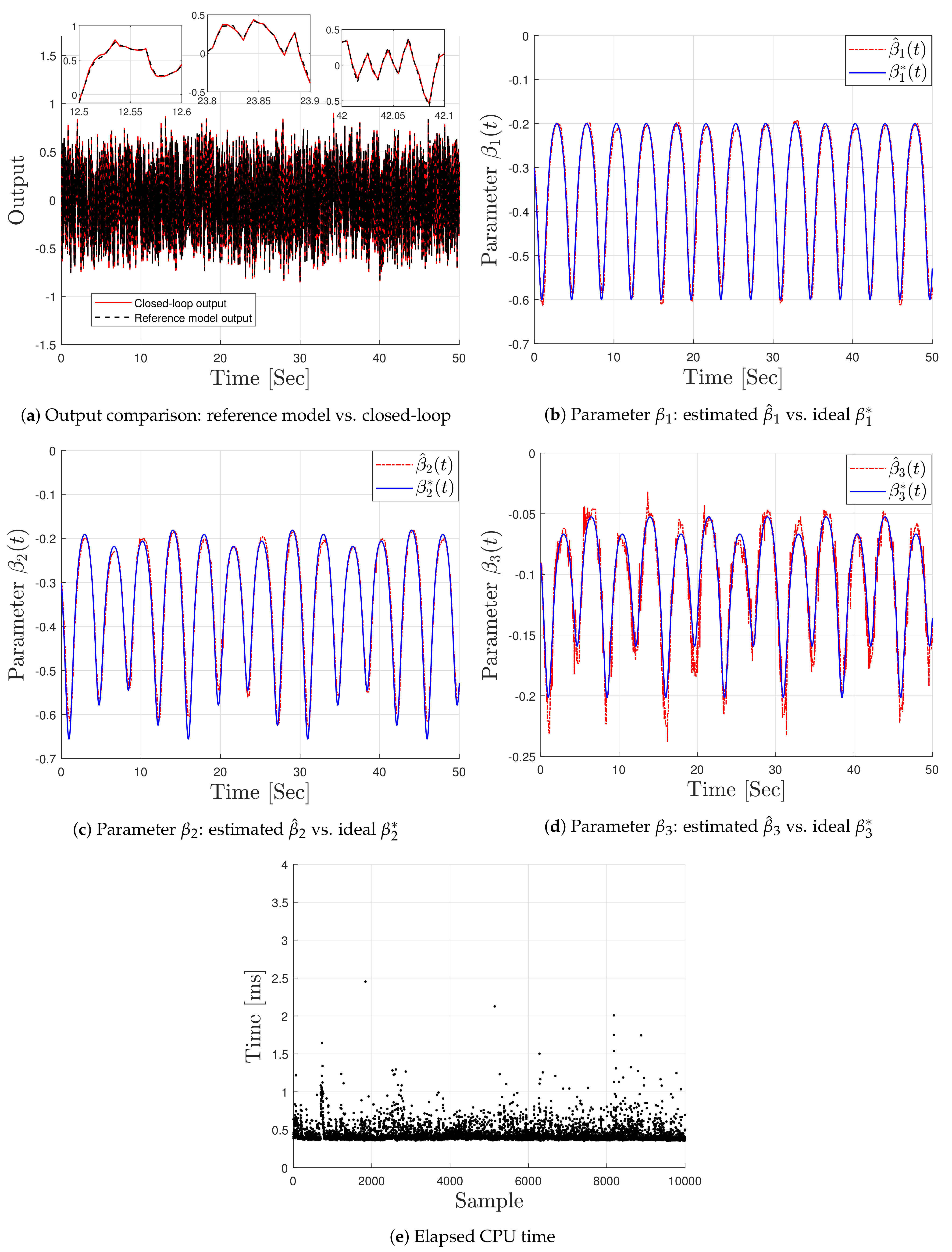
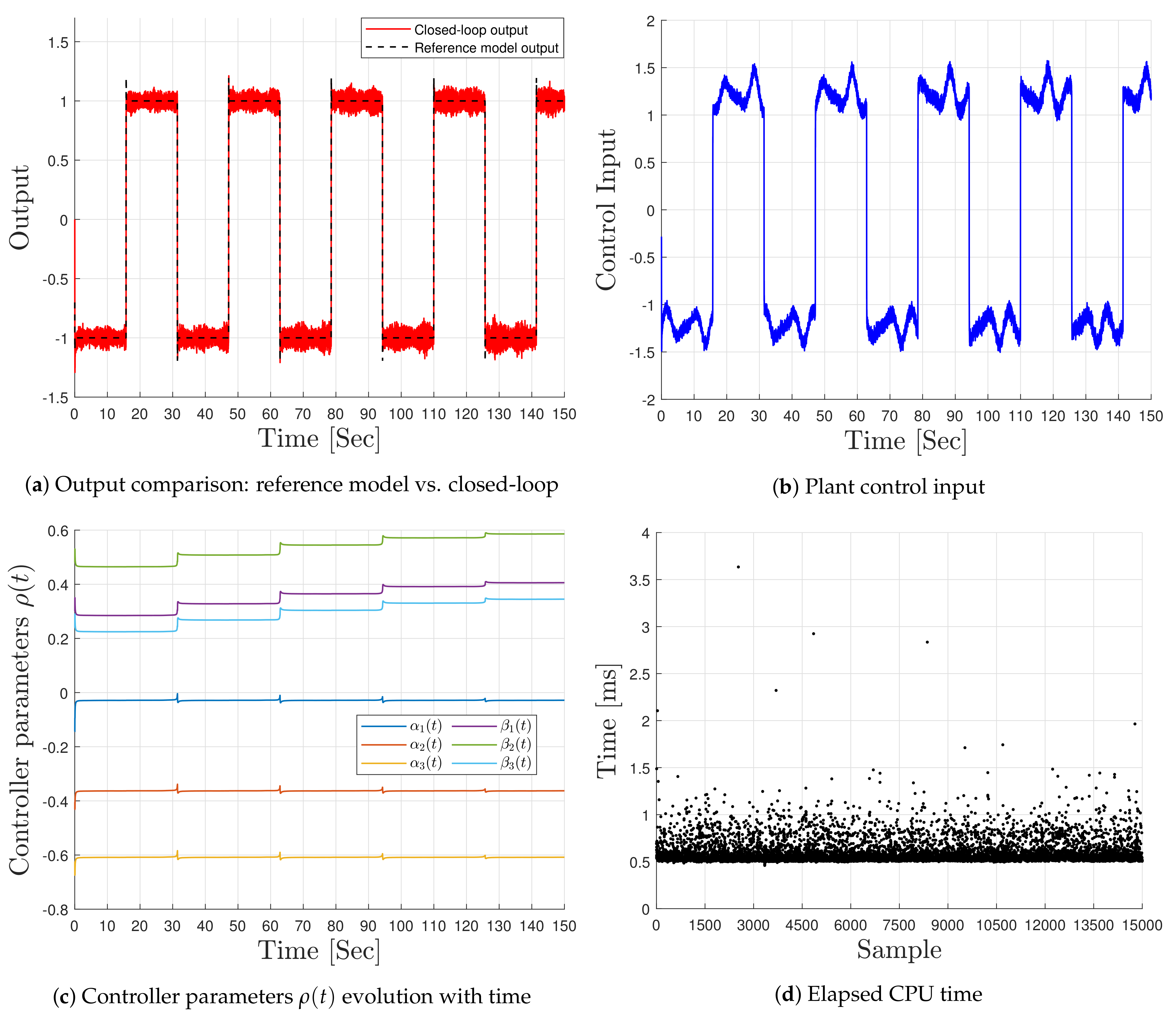
Section 5, allowing us to compute the controller parameters by solving a suitable linear program at each time step. The effectiveness of the proposed scheme is shown in
Section 6 by means of two simulation examples. Concluding remarks and planned future works end the paper.
2. Problem Formulation
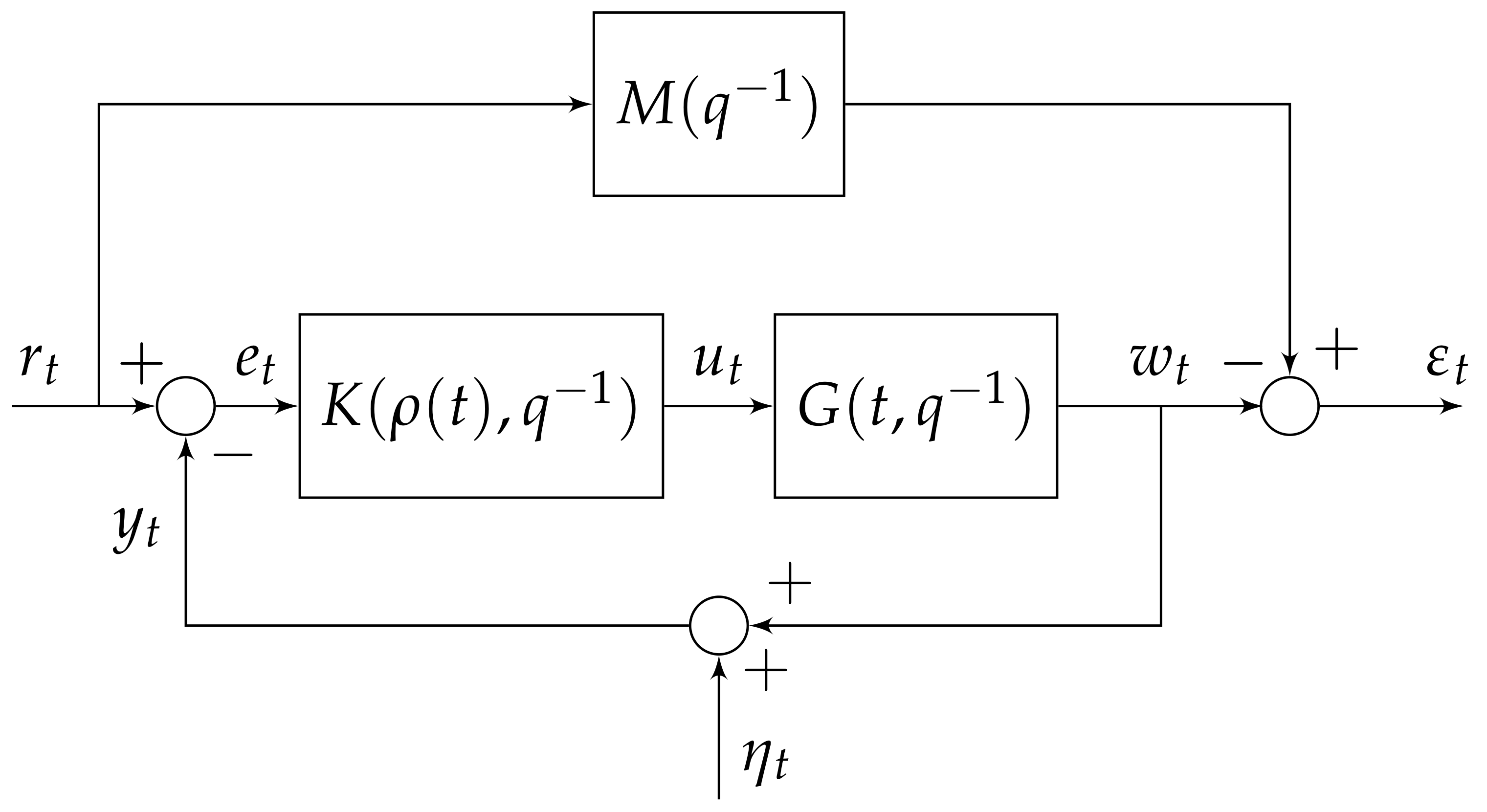
Let us consider the discrete-time single-input single-output (SISO) feedback control scheme depicted in
Figure 1, where
denotes the backward shift operator (i.e.,
), and
is the transfer function of a given linear time invariant (LTI) reference model that describes the desired closed-loop behaviour of the feedback control system to be designed.
The plant
to be controlled is described by a SISO LTV system defined by the following linear difference equation
where
is the plant input (controller output) and
is the noise free output signal, while
and
are time-varying polynomials described by
where
. The parameters
and
vary according to
and
where
and
are unknown parameter variations between two consecutive generic time instants
and
t.
Let
be the noise-corrupted measurement of
,
Measurement uncertainty
is known to range within given bound
, more precisely
Let us now introduce the following two assumptions.
Assumption 1. The transfer function is assumed to be stable and minimum phase .
Assumption 2. The transfer function is assumed to be minimal .
Assumption 2 is equivalent to say that the system is completely controllable and observable.
The controller
is a SISO LTV system described by the following equations
where
is the difference between the reference signal
and the noise-corrupted output
, i.e.,
and time-varying polynomials
and
are represented as
where we assume that
.
As same as the plant, the parameters of the controller
and
are assumed to vary according to
and
where
and
are the controller’s parameter variations between two successive time instants
and
t. The parameter variation vector
is defined as follows,
where
. We assume that
is unknown, but bounded. More specifically, we assume that
belongs to the the following time-varying set:
where
,
, due to the structure of the addressed problem, are unknown variation bounds. This point will be addressed in the next section.
The aim of this work is to estimate, at each time instant
t, the parameter vector
, characterizing the controller
, defined as
without explicitly taking into account any information about the plant, neither its structure or how the parameters vary, i.e., Equations (
1)–(
5). This is due to the fact that we are considering a model-free setting for the plant, as we can not rely on having such information, and we only use the input-output data from the plant to design
.
At this point, the data-driven control problem for LTV systems, considered in this paper, can be stated as follows.
Problem 1 (
Adaptive Data-Driven Controller Design).
The problem addressed in this paper is to design a time-varying controller such that the the closed loop transfer function , at each time step t, given bymatches, as close as possible, that of the assigned reference model , under the assumption that the plant transfer function is unknown. In other words, we want to find a controller that makes the output matching error signal , defined as:as close as possible to zero. Please note, in order to simplify notation, we drop the backward shift operator from all equations presented in the remainder of this paper.
3. Adaptive DDC for LTV Systems in the Set-Membership Framework
In this section, we address the formulation of the adaptive data-driven control design problem, as described in Problem 1.
First let us introduce the time-varying feasible controller set (FCS), which is inspired by the feasible parameter set (FPS) for LTV systems proposed in [
26] and the FCS definition for LTI controllers presented in [
23]. The time-varying FCS, for the case of LTV systems, is defined as follows.
Definition 1. [Time-Varying Feasible Controller Set]
At a generic time t, the feasible controller set (FCS) is defined as the set of all controllers belonging to a given model class such that for each controller in this set there exists at least one noise sequence and parameter variations , , such that the difference between the reference model output and that of the closed-loop system From Definition 1, the time-varying FCS can be described as:
As it can be clearly seen from the set , the controller class is parametrized by , hence we can replace the time-varying set with the time-varying feasible controller parameter set which is defined as follows.
Definition 2. [Time-Varying Feasible Controller Parameter Set]
The feasible controller parameter set (FCPS), at a generic time t, is defined as the set of all the controller parameters such that .
On the basis of Definition 2, we now state the following result.
Result 1. Structure of the Feasible Controller Parameter Set
At a generic time instant t, the feasible controller parameter set (FCPS) for the time-varying controller , is defined aswhere,and are the parameters of an initial controller that stabilizes the plant. Proof. Starting from the time-varying FCS, as in Definition 1, the output matching error signal Equation (
18) can be written as:
The closed-loop system’s output
, which is the unknown plant’s output, is equal to:
or equivalently,
From here, Equation (
23) can be rewritten as:
and from (
6) and (
9), (
26) becomes:
The term (
) can be written as,
where
is the sensitivity function.
Based on the approach presented in [
27], we introduce the following approximation,
where
is the ideal controller and follows the same definition as in [
23].
Now thanks to (
29), Equation (
27) becomes
Finally, dividing both sides of Equation (
30) by
and multiplying by
leads to:
which can be equivalently rewritten as,
where,
□
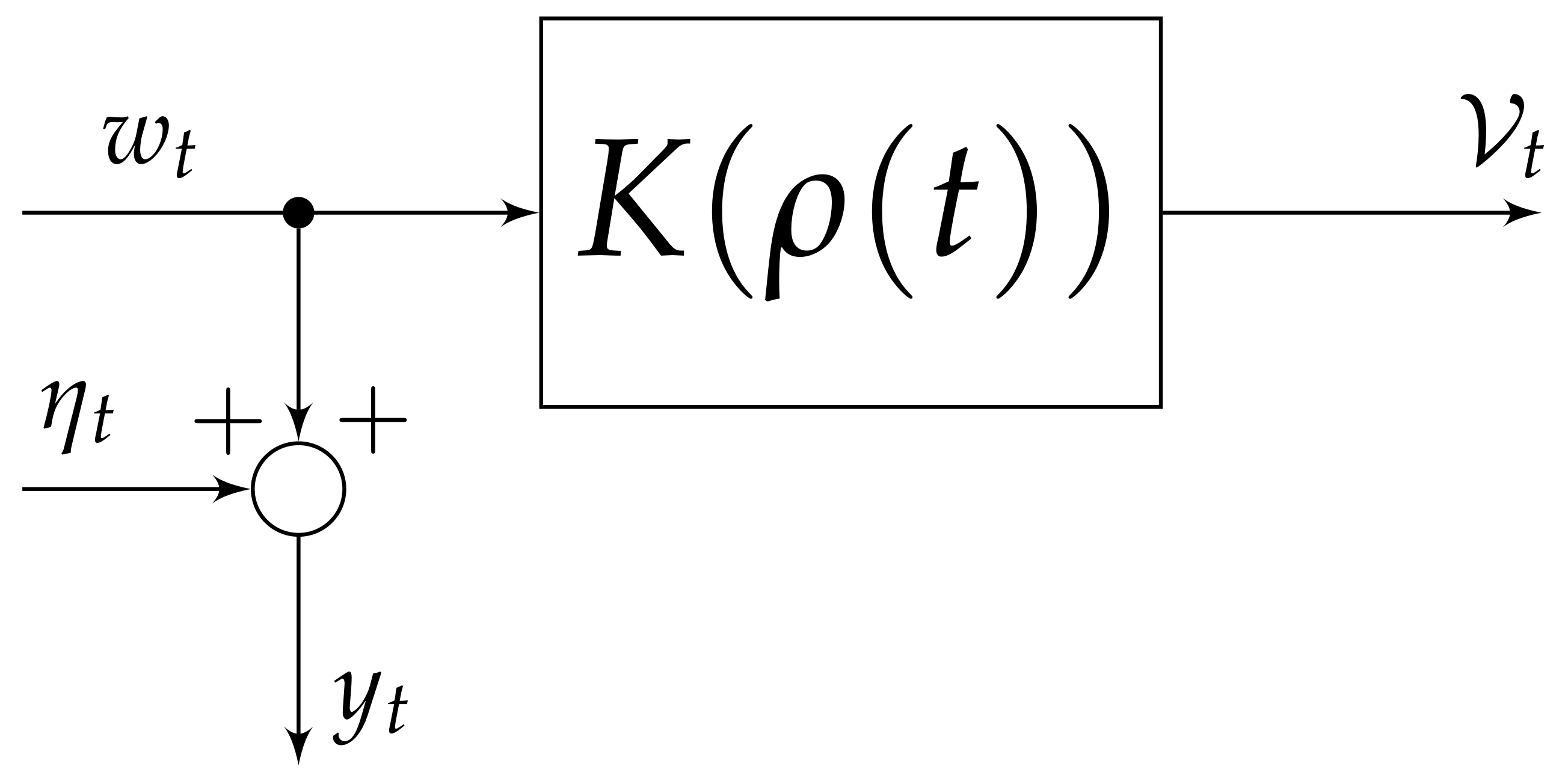
A block diagram description of Equation (
32), characterizing the FCPS in (
21), is given in
Figure 2. This figure shows that by collecting from the closed-loop system, shown in
Figure 1, the noise corrupted output measurements
and the control input
, we can design the adaptive controller by solving a suitable optimization problem as will be described in the next section.
As given from Definition 2, the FCPS contains all the parameters
such that
. In practice, however, we need to pick just a single point from the FCPS to design the controller
to be implemented in the feedback control scheme as in
Figure 1. As it can be clearly seen from the set in (
21), the FCPS is characterized by the unknown variation bounds
,
. Therefore, in order to design
we need to compute these variation bounds. In the next section we will address the problem of finding a single point controller, at each time instant
t, in the FCPS that corresponds to the minimum value bounding the variation on all parameters
.
4. Parameter Variation Bounds Computation
In this section, we propose an algorithm for computing the minimum variation value that bounds all parameters .
First, let us introduce the following time-dependant parameters variation vector
where
characterizes the time-varying set
in (
15). In order to compute the minimum parameter variation vector we need to solve the following multi-objective optimization problem
Multi-objective optimization (MOO) problems are those that involve more than one objective function to be optimized simultaneously. Several approaches tackling MOO problems are present in the literature (see, e.g., [
28,
29,
30,
31]). All of these techniques do not return the exact solution for each objective function, but rather a trade-off between all of them by approximating a set of Pareto optimal solutions. In the problem addressed in this section, we want to know the variation bound for each of the controller parameters, but the solution of the multi-objective optimization problem (
35) will return the best candidates that minimize all objective functions together, which may not necessarily be the true value for the variation bounds. On the other hand, another crucial point worth highlighting, is the fact that the computation complexity of solving MOO can not be applied in the adaptive scheme considered in this paper.
In the following formulation, we will consider the case of computing a single variation bound, denoted as
hereinafter, that represents the minimum variation bounding all
. In other words, we want to find a single point controller
that corresponds to the minimum variation bound
. We can generically formulate the problem mathematically as:
where,
The following result shows that (
36) can be written as a constrained polynomial optimization problem.
Result 2. Computation of
The controller parameters , corresponding to the minimum variation bound , can be computed solving the following optimization problem:where . Problem (
38) is a nonconvex polynomial optimization problem due to the presence of bilinear terms in the equation
, i.e., the controller parameters are multiplied by samples of the unknown measurement noise. The global optimal solution of problem (
38) can be approximated by means of semidefinite programming relaxation techniques, see, e.g., [
32,
33,
34]. However these methods require huge computational efforts and memory resources, and hence can not be applied in the considered adaptive control scheme. In the next section, we propose a convex relaxation approach which allows us to rewrite optimization problem (
38) as a linear problem starting from the results recently presented in [
25].
5. A Convex Relaxation Approach
In this section, we propose a convex relaxation approach, which allows us to rewrite the nonconvex optimization problem (
38) as an equivalent linear problem. The main idea is based on the work recently proposed in [
25], where we rely on the concept of McCormick envelopes [
35] to relax the original problem to an equivalent convex one.
Let us first rewrite Equation (
32) as follows
Now to eliminate the bilinear terms in (
39), we introduce the following variables,
allowing us to write (
39) as
Now direct application of the approach presented in [
25] allows us to state the following result in order to bound
.
Result 3. Upper and lower bounds on
Based on the concept of McCormick envelopes, , , satisfies the following set of inequalities Bounds and are given bywhere are the estimates at time . As it can be clearly observed from Result 3, by substituting (
46) and (
47) into inequalities (
42)–(
45), we once again encounter bilinear terms due to the multiplication of the unknown variation bounds with the noise samples, i.e.,
. In the next result, we show that (
42)–(
45) can be written as equivalent linear inequalities.
Result 4. Inequalities (42)–(45) are equivalent to: Since the proof for all four inequalities in Result 4 is the same, for simplicity we will only prove that inequality (
48) is equivalent to (
42).
Proof. Let us rewrite (
42), substituting
with (
46), as follows
Since
,
, are unknown but bounded according to (
7), Equation (
52) can be rewritten equivalently as:
where
is a known value (estimate at time
), and upper bound on the variation is greater than or equal to zero, i.e.,
,
.
□
Remark 1. For LTV systems, in most cases it is safe to assume that all variation bounds are strictly greater than zero, i.e., . However, there can be some cases where this statement is not true, e.g., a PI controller, hence assuming that assures the possibility of having a more general setting. Furthermore, one other case where this setting is useful is when the plant to be controlled is an LTI one, which implies by definition that variations on the controller parameters, after a transient state, are equal to zero.
At this point we are in a position to state the main result of the paper.
Result 5. Computation ofby means of Linear Programming (LP)
The controller parameters can be computed by solving the following linear program:where the decision variables are the unknown parameters , and the variables , . The proof of Result 5 is obtained by noticing that once
is replaced with (
41) and inequalities (
48)–(
51), problem (
54) requires the solution of a linear function subject to linear inequalities.
7. Conclusions and Future Works
An adaptive data-driven control approach for linear time varying systems is presented. First, through a model-matching scheme, we formulate the the controller design problem as a suitable polynomial optimization problem in the set-membership identification framework. Characterizing the variation on the controller parameters, we then propose a reformulation to compute a single point controller that corresponds to the minimum upper bound on the parameters variation. A convex relaxation approach, based on McCormick envelopes, is proposed to solve the controller design problem by means of linear programming. Effectiveness of the proposed approach is shown by means of two simulation examples.
The work presented in this paper sets the basic foundations for the problem of designing adaptive controllers for LTV systems using set-membership identification techniques. In future works, activities will be devoted towards the following:
Deriving conditions that assure stability of the designed feedback control system, allowing us to consider the problem of controlling unstable, as well as non-minimum phase, systems.
Extension of the results to the control of nonlinear systems.
Extending the approach presented in this paper to the control of multivariable LTV systems.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




