
Two-Stage Liver and Tumor Segmentation Algorithm Based on Convolutional Neural Network


Abstract
:1. Introduction
2. Method
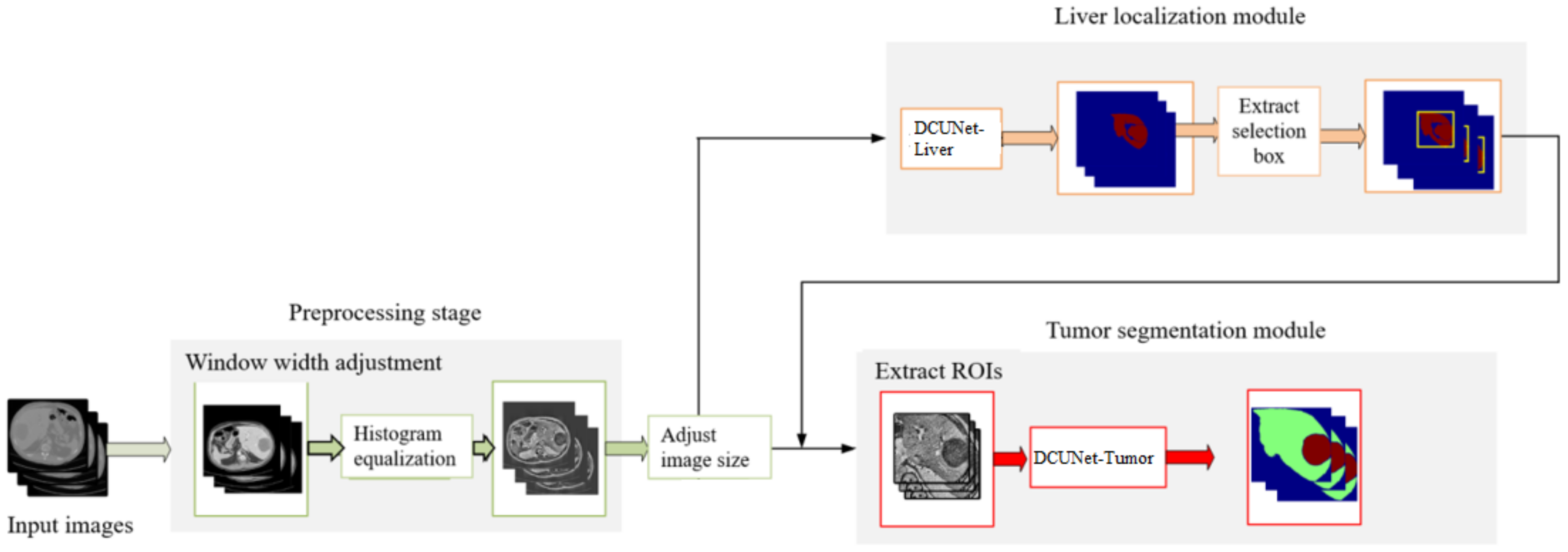
2.1. Overall Process
- (1)
- In the preprocessing stage, the original CT image window width is adjusted to enhance the contrast of the liver region. We use the histogram equalization to extend the processed CT image pixels nonlinearly. The operation makes the pixels evenly distributed and highlights the features of the tumor region.
- (2)
- In the first stage, DCUNet-Liver is used to obtain the segmentation results of the liver region.
- (3)
- In the third stage, according to the liver segmentation results, the detailed 2D features in the CT images are extracted and fused with the 3D spatial features to optimize the segmentation results of liver tumors.
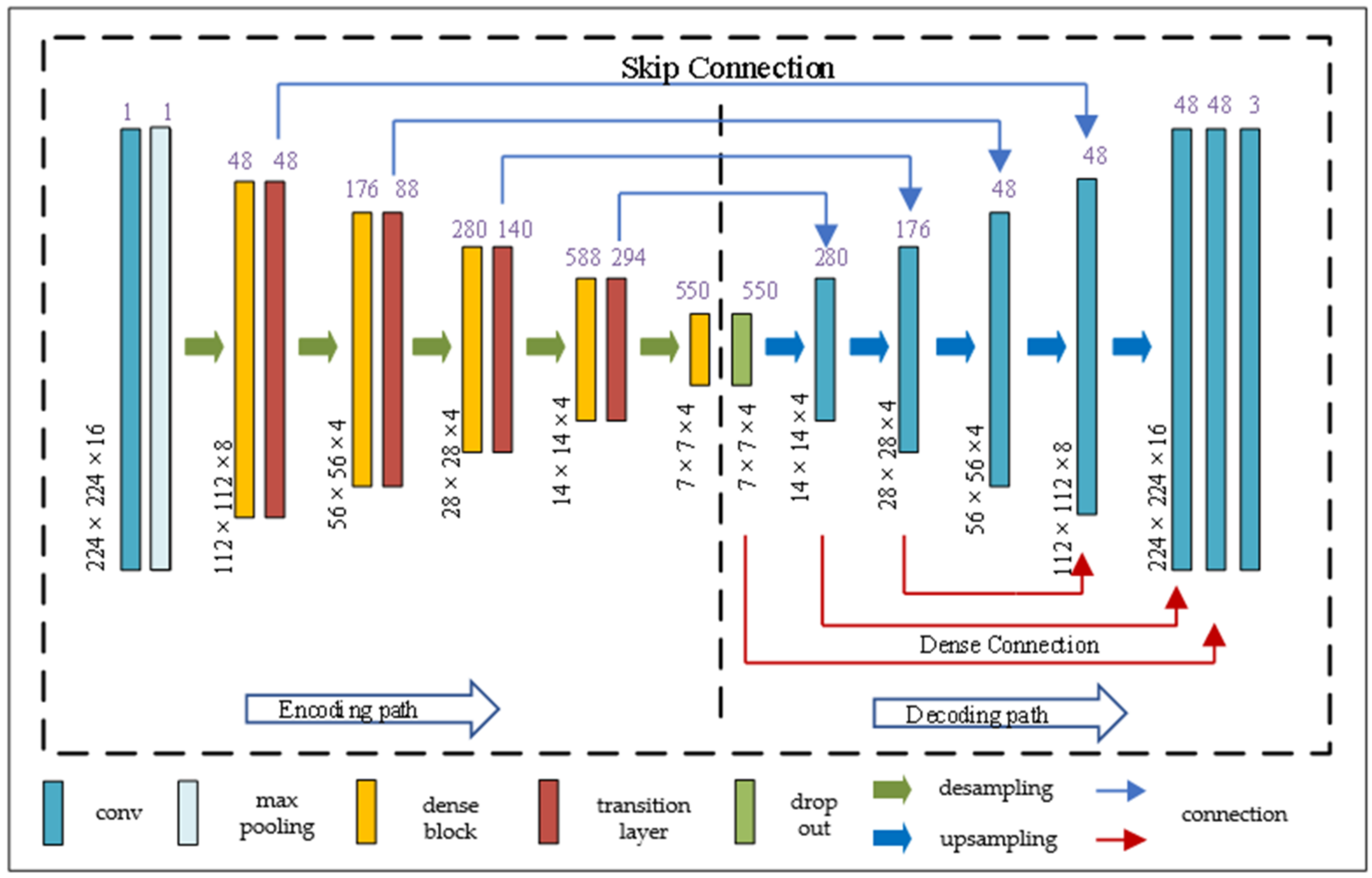
2.2. Stage One: DCUNet-Liver for Liver Segmentation
2.3. Stage Two: DCUNet-Tumor for Liver Tumor Segmentation
2.4. Mixed Loss Function
3. Experimental Results
3.1. Experimental Environment and Parameters
3.2. Data Sets and Quantitative Evaluation Metrics
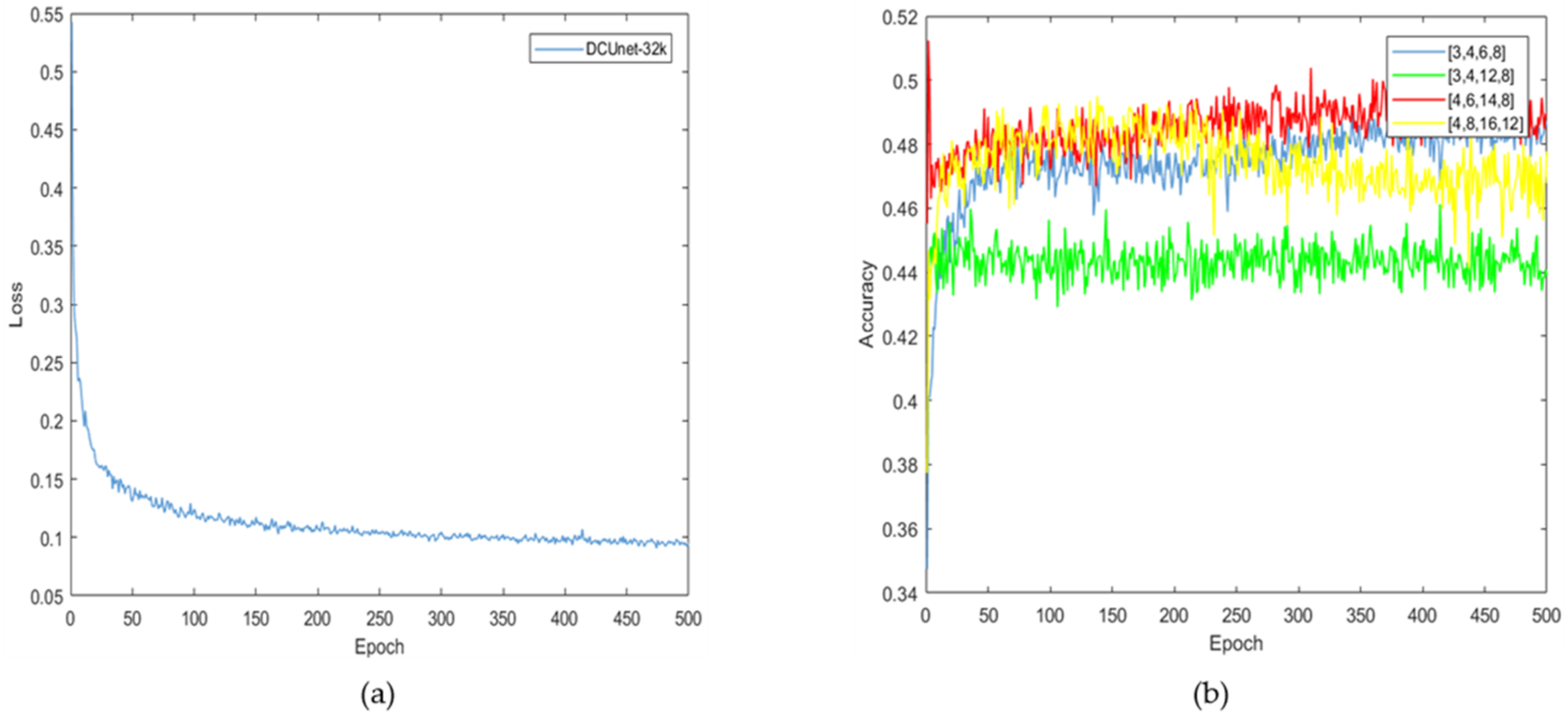
3.3. Training and Verification of the Network Model
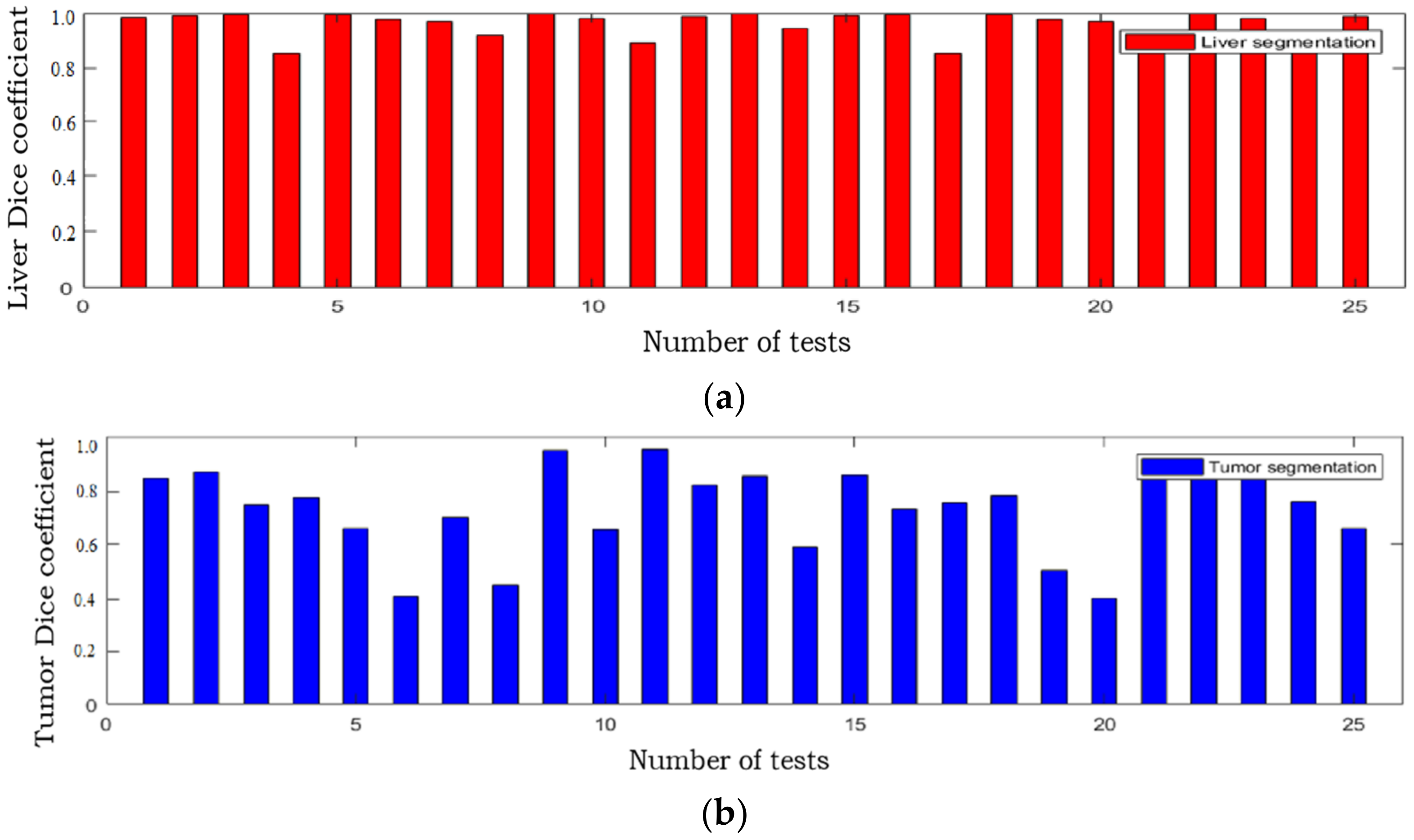
3.4. The Results and Analysis of This Algorithm
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bray, F.; Ferlay, J.; Soerjomataram, I.; Siegel, R.L.; Torre, L.A.; Jemal, A. Global cancer statistics 2018: GLOBOCAN estimates of incidence and mortality worldwide for 36 cancers in 185 countries. CA A Cancer J. Clin. 2018, 68, 394–424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. UNet: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Ben-Cohen, A.; Diamant, I.; Klang, E.; Amitai, M.; Greenspan, H. Fully Convolutional Network for Liver Segmentation and Lesions Detection. In International Workshop on Deep Learning in Medical Image Analysis; Springer: Cham, Switzerland, 2016; pp. 77–85. [Google Scholar]
- Sun, C.; Guo, S.; Zhang, H.; Li, J.; Chen, M.; Ma, S.; Jin, L.; Liu, X.; Li, X.; Qian, X. Automatic segmentation of liver tumors from multiphase contrast-enhanced CT images based on FCNs. Artif. Intell. Med. 2017, 83, 58–66. [Google Scholar] [CrossRef] [PubMed]
- Chlebus, G.; Schenk, A.; Moltz, J.H.; van Ginneken, B.; Hahn, H.K.; Meine, H. Automatic liver tumor segmentation in CT with fully convolutional neural networks and object-based post-processing. Sci. Rep. 2018, 8, 15497. [Google Scholar] [CrossRef] [PubMed]
- Lu, F.; Wu, F.; Hu, P.; Peng, Z.; Kong, D. Automatic 3D liver location and segmentation via convolutional neural network and graph cut. Int. J. Comput. Assist. Radiol. Surg. 2017, 12, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Qayyum, A.; Lalande, A.; Meriaudeau, F. Automatic segmentation of tumors and affected organs in the abdomen using a 3D hybrid model for computed tomography imaging. Comput. Biol. Med. 2020, 127, 104097. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Shi, T.; Bai, Z.; Huang, L. AHCNet: An Application of Attention Mechanism and Hybrid Connection for Liver Tumor Segmentation in CT Volumes. IEEE Access 2019, 7, 24898–24909. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Wang, F.; Jiang, M.; Qian, C.; Yang, S.; Li, C.; Zhang, H.; Wang, X.; Tang, X. Residual Attention Network for Image Classification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6450–6458. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.-A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 565–571. [Google Scholar]
- Li, X.; Chen, H.; Qi, X.; Dou, Q.; Fu, C.W.; Heng, P.A. H-DenseUNet: Hybrid Densely Connected UNet for Liver and Tumor Segmentation from CT Volumes. IEEE Trans. Med. Imaging 2018, 37, 2663–2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bi, L.; Kim, J.; Kumar, A. Automatic Liver Lesion Detection using Cascaded Deep Residual Networks. arXiv 2017, arXiv:170402703. [Google Scholar]
- Yuan, Y. Hierarchical Convolutional-Deconvolutional Neural Networks for Automatic Liver and Tumor Segmentation. arXiv 2017, arXiv:171004540. [Google Scholar]
- Kaluva, K.C.; Khened, M.; Kori, A.; Krishnamurthi, G. 2D-Densely Connected Convolution Neural Networks for automatic Liver and Tumor Segmentation. arXiv 2018, arXiv:180202182. [Google Scholar]
- Vorontsov, E.; Tang, A.; Pal, C.; Kadoury, S. Liver lesion segmentation informed by joint liver segmentation. arXiv 2017, arXiv:170707734. [Google Scholar]
- Liu, Z.; Song, Y.Q.; Sheng, V.S.; Wang, L.; Jiang, R.; Zhang, X.; Yuan, D. Liver CT sequence segmentation based with improved U-Net and graph cut. Expert Syst. Appl. 2018, 126, 54–63. [Google Scholar] [CrossRef]
- Guo, X.; Schwartz, L.H.; Zhao, B. Automatic liver segmentation by integrating fully convolutional networks into active contour models. Med. Phys. 2019, 46, 4455–4469. [Google Scholar] [CrossRef] [PubMed]
- Meng, L.; Tian, Y.; Bu, S. Liver tumor segmentation based on 3D convolutional neural network with dual scale. J. Appl. Clin. Med. Phys. 2020, 21, 144–157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fang, X.Y.P.; Xu, S. Deep learning-based liver segmentation for fusion-guided intervention. Int. J. Comput. Assist. Radiol. Surg. 2020, 15, 963–972. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | Configuration Information |
|---|---|
| GPU | Tesla K40L |
| Video memory | 12 G |
| Memory | 64 G |
| Operating system | Ubuntu 16.04 |
| Hard disk | 4 TB |
| Programming Software | Keras 2.2.0; Python 2.7; Matlab 2015b |
| Hyperparameters | Setting | |
|---|---|---|
| Liver Localization Module | Tumor Segmentation Module | |
| Initial learning rate | 0.001 | 0.001 |
| Dropout | 0.5 | 0.5 |
| Batch_size | 10 | 1 |
| Epoch | 500 | 500 |
| Optimizer | SGD | SGD |
| Growth_rate | 32 | 64 |
| Network Model | Liver (Dice) | Tumor (Dice) |
|---|---|---|
| DCUnet-Liver | 0.934 | 0.656 |
| DCUnet-Tumor | 0.967 | 0.725 |
| Network Model | Training (Dice) | Testing (Dice) |
|---|---|---|
| DCUnet-Liver | 0.99 | 0.967 |
| DCUnet-Tumor | 0.86 | 0.725 |
| Methods | Number of Parameters | Time (Seconds/Piece) |
|---|---|---|
| 2D DenseUNet [14] | 49,970,531 | 0.674 |
| H-DenseUNet [14] | 61,444,622 | 0.829 |
| Our algorithm | 21,909,838 | 0.479 |
| Network Model | Liver | Tumor |
|---|---|---|
| Li [14] | 0.961 | 0.722 |
| Bi [15] | 0.934 | 0.645 |
| Yuan [16] | 0.963 | 0.657 |
| Kaluva [17] | 0.912 | 0.492 |
| Vorontsov [18] | 0.951 | 0.661 |
| Liu [19] | 0.951 | — |
| Guo [20] | 0.943 | — |
| Meng [21] | 0.965 | 0.689 |
| Fang [22] | 0.961 | — |
| Our algorithm | 0.967 | 0.725 |
| Group | Dice | VOE | RVD |
|---|---|---|---|
| Ours | 0.967 | 0.082 | 0.022 |
| Mantis_shrimp | 0.959 | 0.078 | 0.009 |
| schwein | 0.959 | 0.078 | 0.008 |
| SMC_QMIA | 0.958 | 0.079 | −0.023 |
| Yong | 0.958 | 0.081 | 0.030 |
| BriceRauby | 0.957 | 0.083 | 0.015 |
| Karo | 0.955 | 0.085 | 0.034 |
| kikikirai | 0.955 | 0.086 | −0.029 |
| Neymo | 0.954 | 0.086 | −0.009 |
| VincentHan | 0.953 | 0.088 | −0.001 |
| CYNSAHZU | 0.950 | 0.084 | −0.006 |
| kirai | 0.946 | 0.1 | −0.022 |
| Jangho_Kwon | 0.937 | 0.109 | −0.021 |
| EdwardMa | 0.924 | 0.141 | −0.025 |
| Group | Dice | VOE | RVD |
|---|---|---|---|
| Ours | 0.725 | 0.347 | −0.034 |
| SMC_QMIA | 0.707 | 0.333 | −0.096 |
| davidlinhl | 0.7 | 0.342 | −0.064 |
| CYNSAHZU | 0.699 | 0.367 | −0.136 |
| KristinChen | 0.694 | 0.401 | −0.195 |
| MengLei1 | 0.69 | 0.362 | −0.069 |
| Cerry | 0.69 | 0.370 | −0.052 |
| viggin | 0.689 | 0.400 | −0.162 |
| LeoZ | 0.686 | 0.376 | 0.014 |
| Eric101 | 0.681 | 0.353 | −0.066 |
| Yong | 0.661 | 0.375 | −0.007 |
| zhoushen | 0.645 | 0.366 | −0.082 |
| hyukist | 0.631 | 0.375 | −0.088 |
| mahendrakhened | 0.556 | 0.435 | 7.179 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, L.; Zhang, Q.; Bu, S. Two-Stage Liver and Tumor Segmentation Algorithm Based on Convolutional Neural Network. Diagnostics 2021, 11, 1806. https://doi.org/10.3390/diagnostics11101806
Meng L, Zhang Q, Bu S. Two-Stage Liver and Tumor Segmentation Algorithm Based on Convolutional Neural Network. Diagnostics. 2021; 11(10):1806. https://doi.org/10.3390/diagnostics11101806
Chicago/Turabian StyleMeng, Lu, Qianqian Zhang, and Sihang Bu. 2021. "Two-Stage Liver and Tumor Segmentation Algorithm Based on Convolutional Neural Network" Diagnostics 11, no. 10: 1806. https://doi.org/10.3390/diagnostics11101806
APA StyleMeng, L., Zhang, Q., & Bu, S. (2021). Two-Stage Liver and Tumor Segmentation Algorithm Based on Convolutional Neural Network. Diagnostics, 11(10), 1806. https://doi.org/10.3390/diagnostics11101806