Thermal Analysis Based on Dynamic Performance of Rocker Arm Full-Type Needle Bearings

Abstract
:1. Introduction
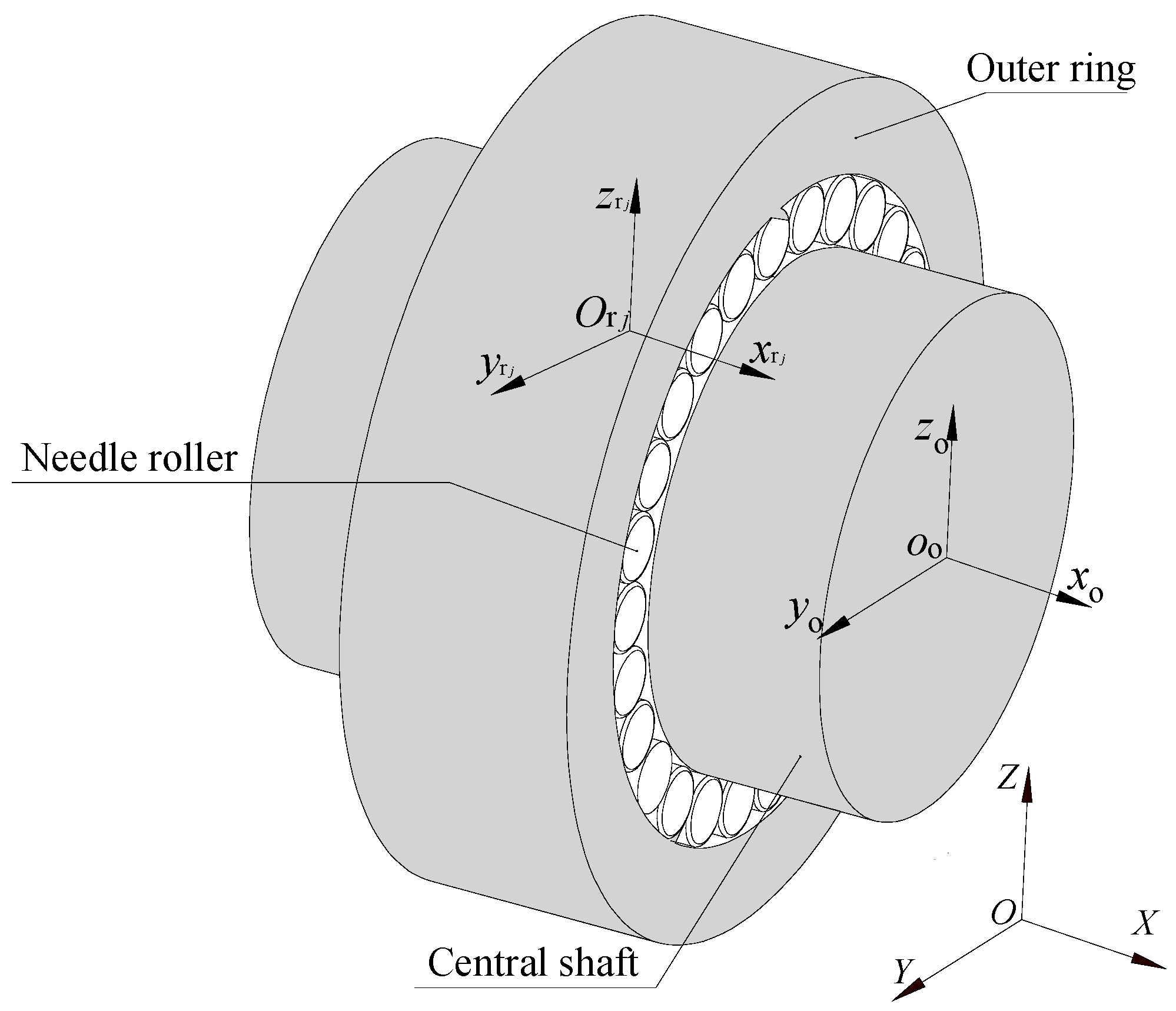
2. Dynamic Model of a Rocker Needle Roller Bearing
- The contact deformation between the needle roller and the raceway conforms to Hertzian elliptical contact theory, and the contact state is full line contact.
- The influences of the frictional moment caused by the skew and tilt of the needle in motion are not considered.
- The needle rollers are evenly distributed in the initial state of simulation, with a certain circumferential clearance.
2.1. Motion Analysis of Needle Rollers
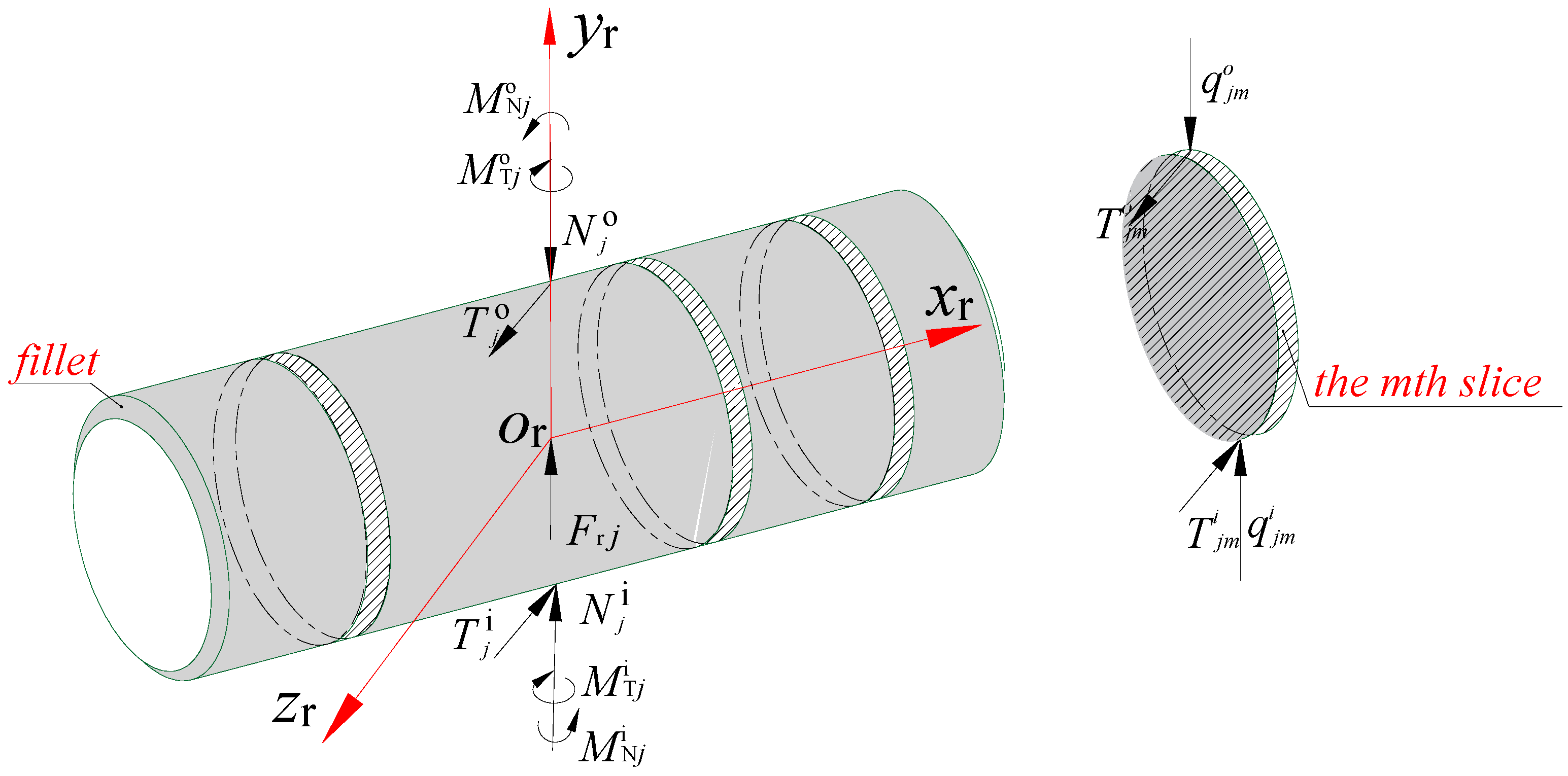
2.2. Force Analysis of Needle Roller
2.3. Nonlinear Equation of the Outer Ring
3. Heat Generation and Heat Transfer Calculation Model for Rocker Needle Roller Bearings
3.1. Calculation Model of Heat Generation for Rocker Needle Roller Bearings
3.1.1. Frictional Power Consumption Caused by the Elastic Hysteresis between the Needle Rollers and the Raceways
3.1.2. Friction Power Consumption Caused by Sliding Friction between the Needle Rollers and the Rings
3.1.3. Friction Power Consumption Caused by Viscous Resistance
3.1.4. Sliding Friction Power Consumption between Adjacent Needle Rollers
3.2. Heat Transfer Calculation Model for Rocker Needle Roller Bearings
3.2.1. Convective Coefficient between Lubricant and Bearing Element Surface
3.2.2. Thermal Conductivity of the Lubricating Oil Film in the Contact Area
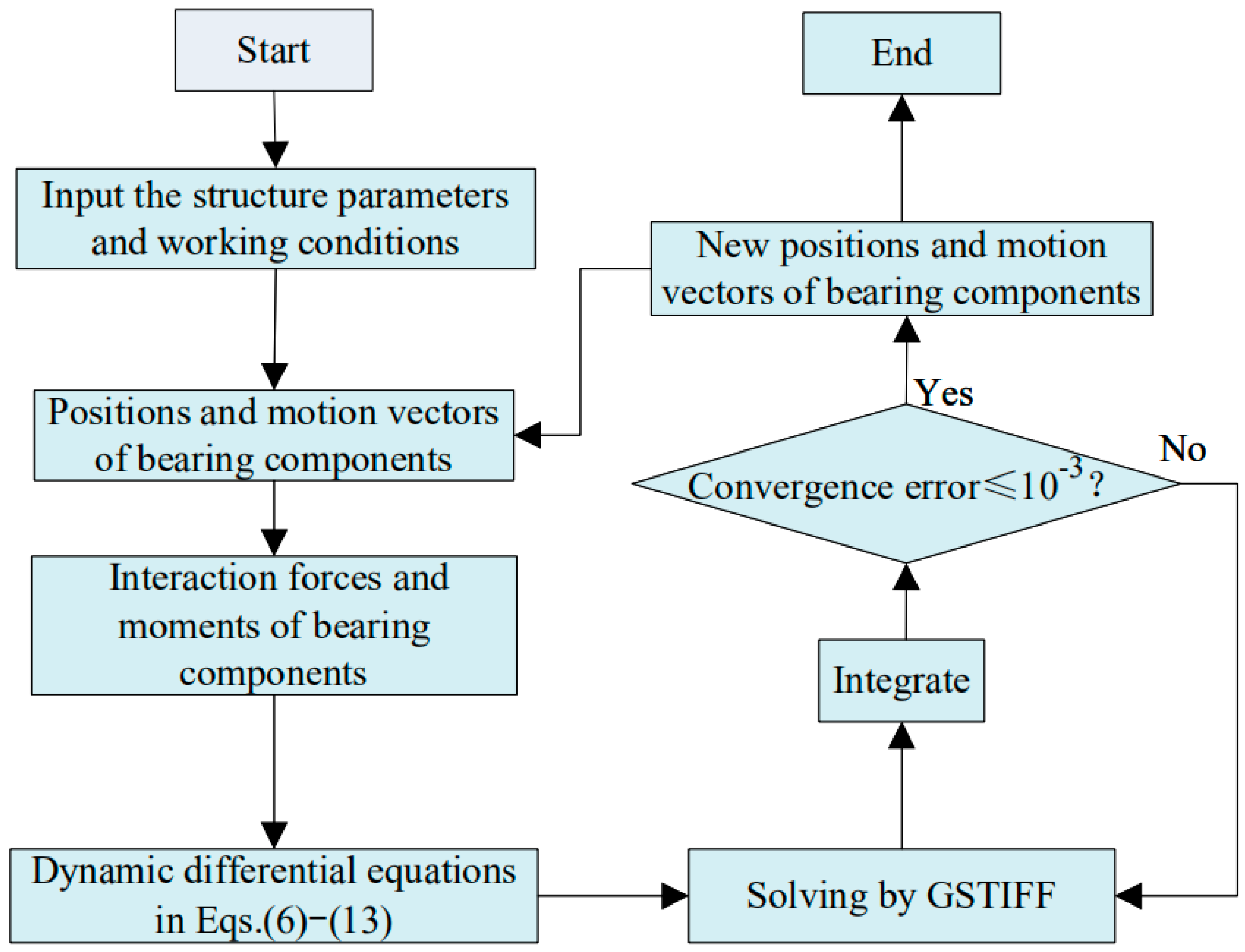
3.3. Friction Power Consumption Solve Process
4. Simulation Analysis and Results
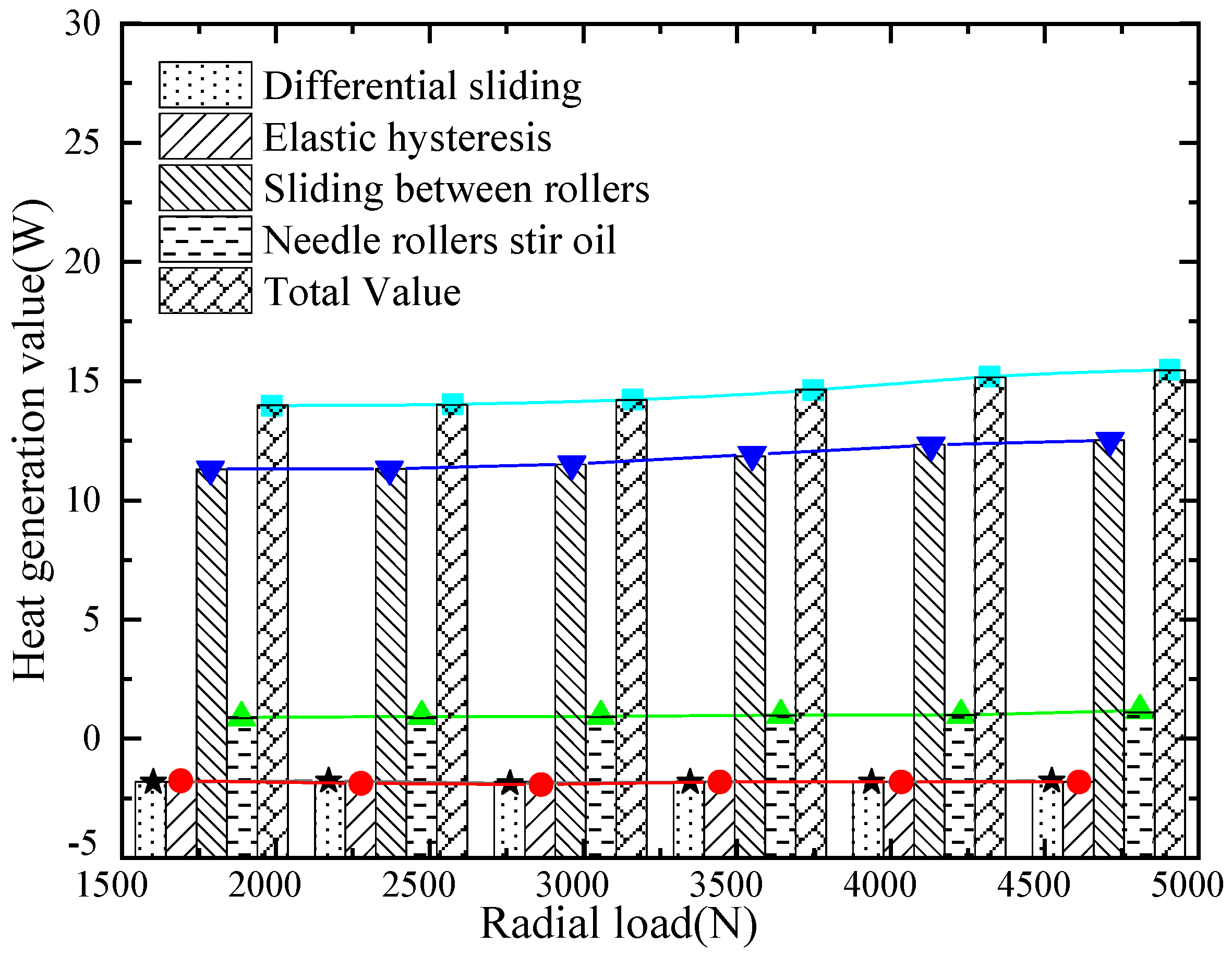
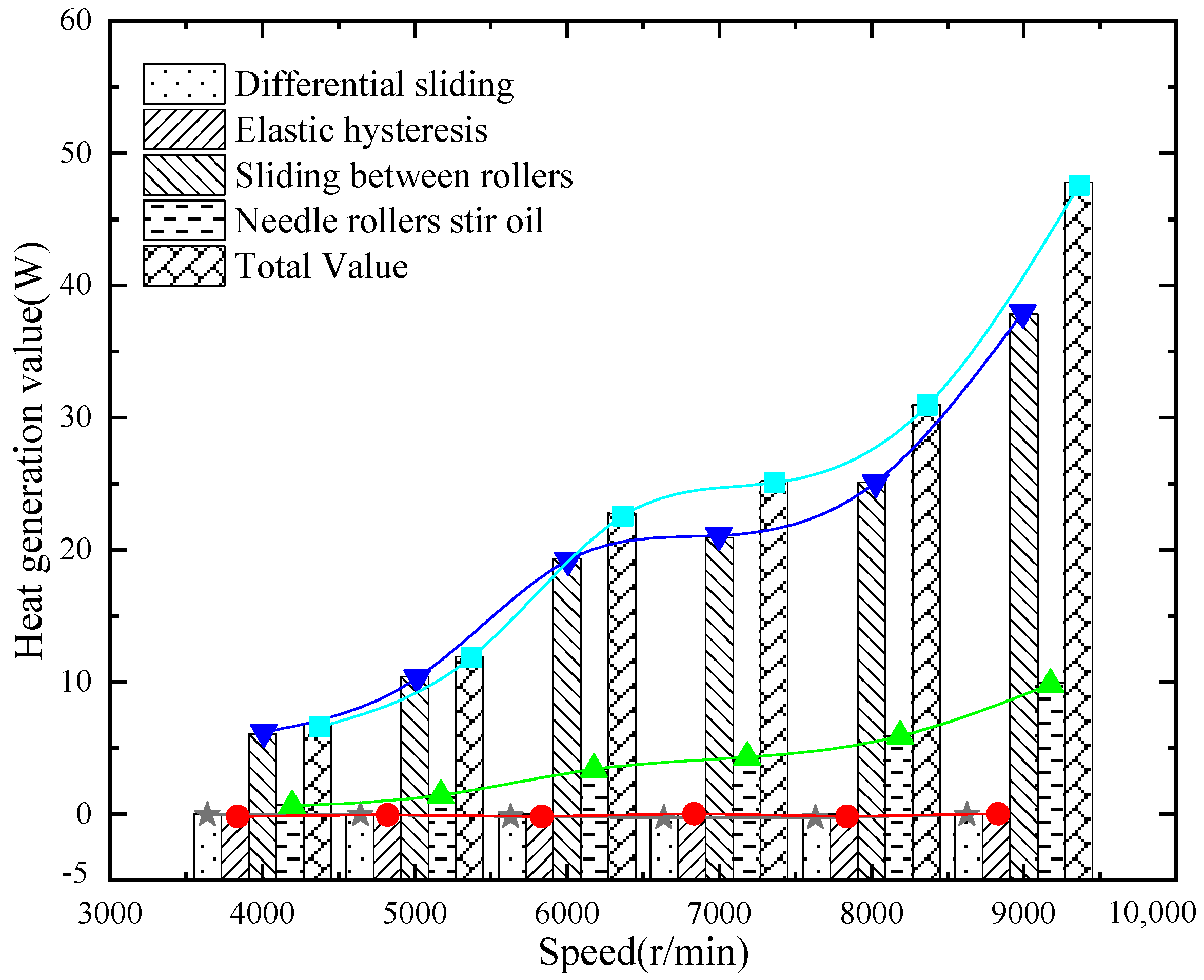
4.1. The Influence of Working Conditions on Bearing Frictional Heat Value
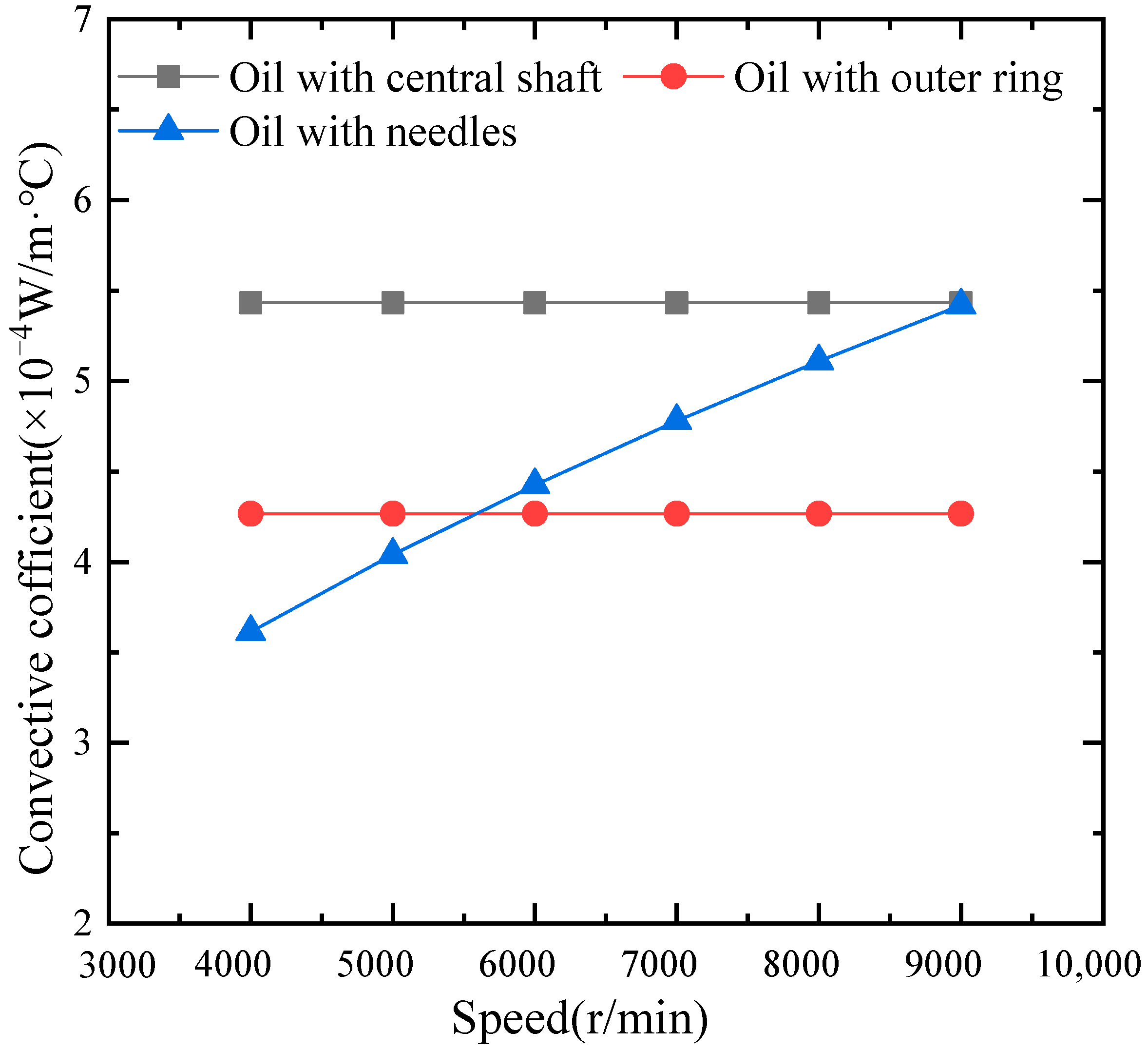
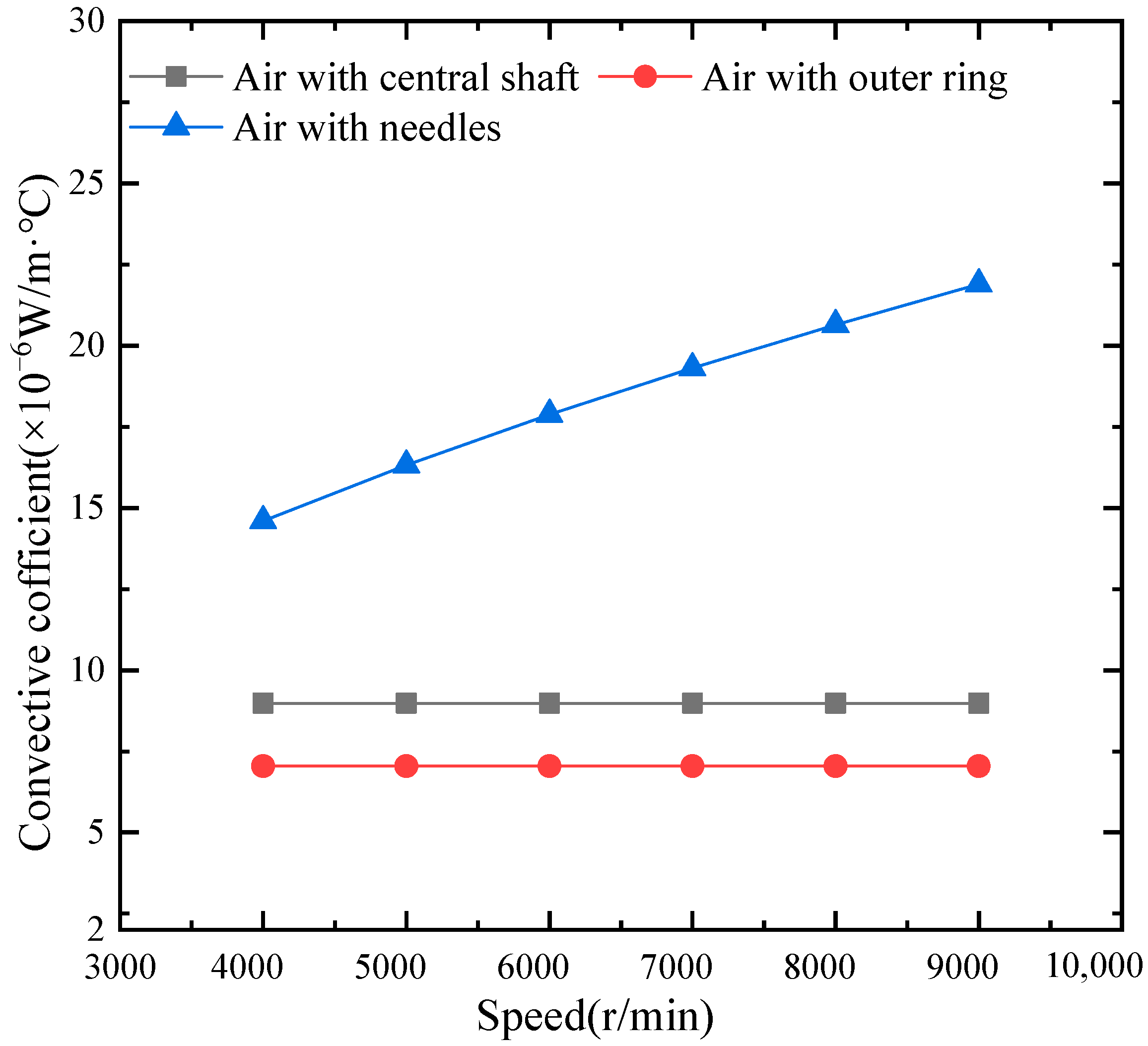
4.2. Calculation of Convective Coefficient
4.2.1. Convective Coefficient between the Bearing’s Components and the Heat Transfer Medium
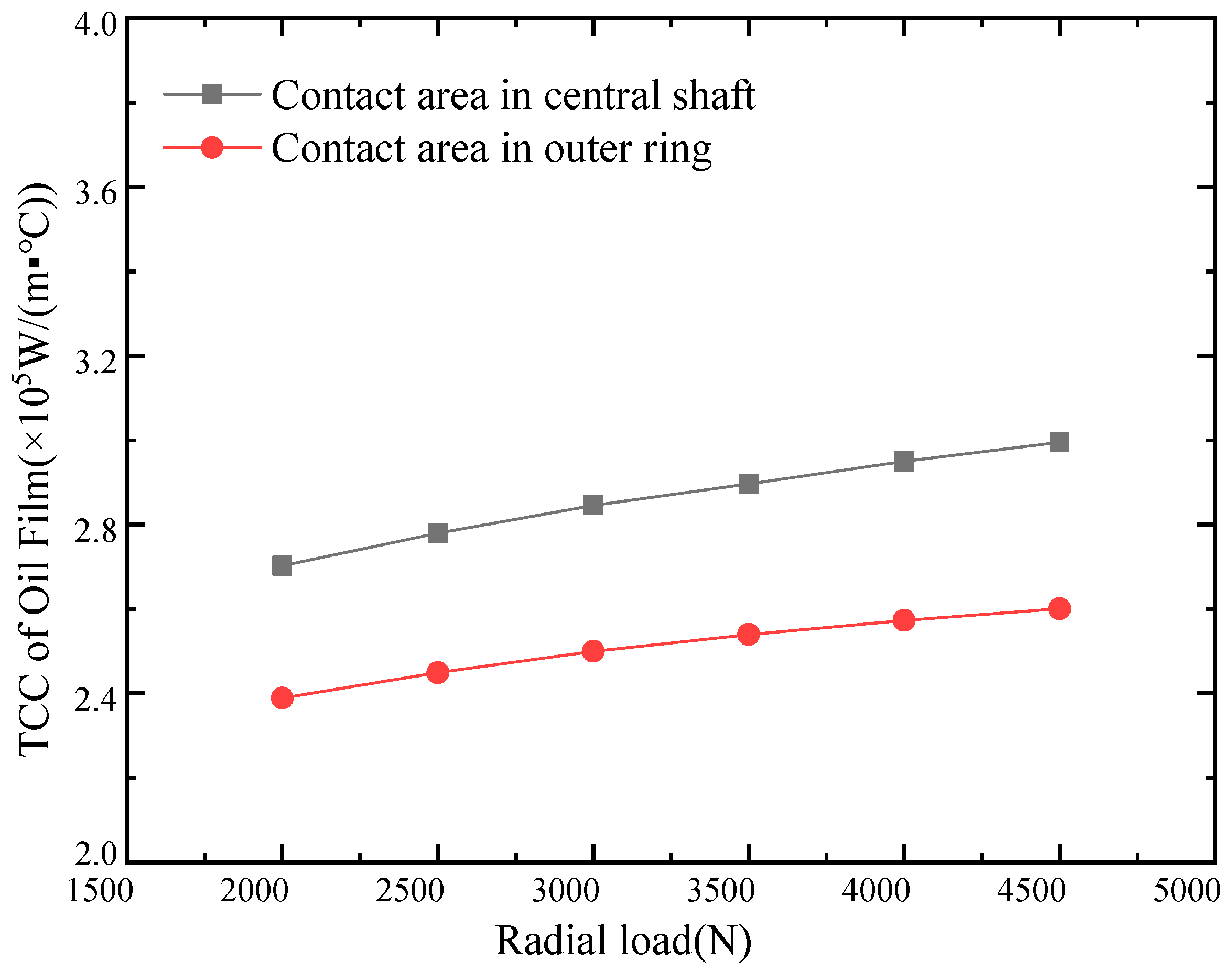
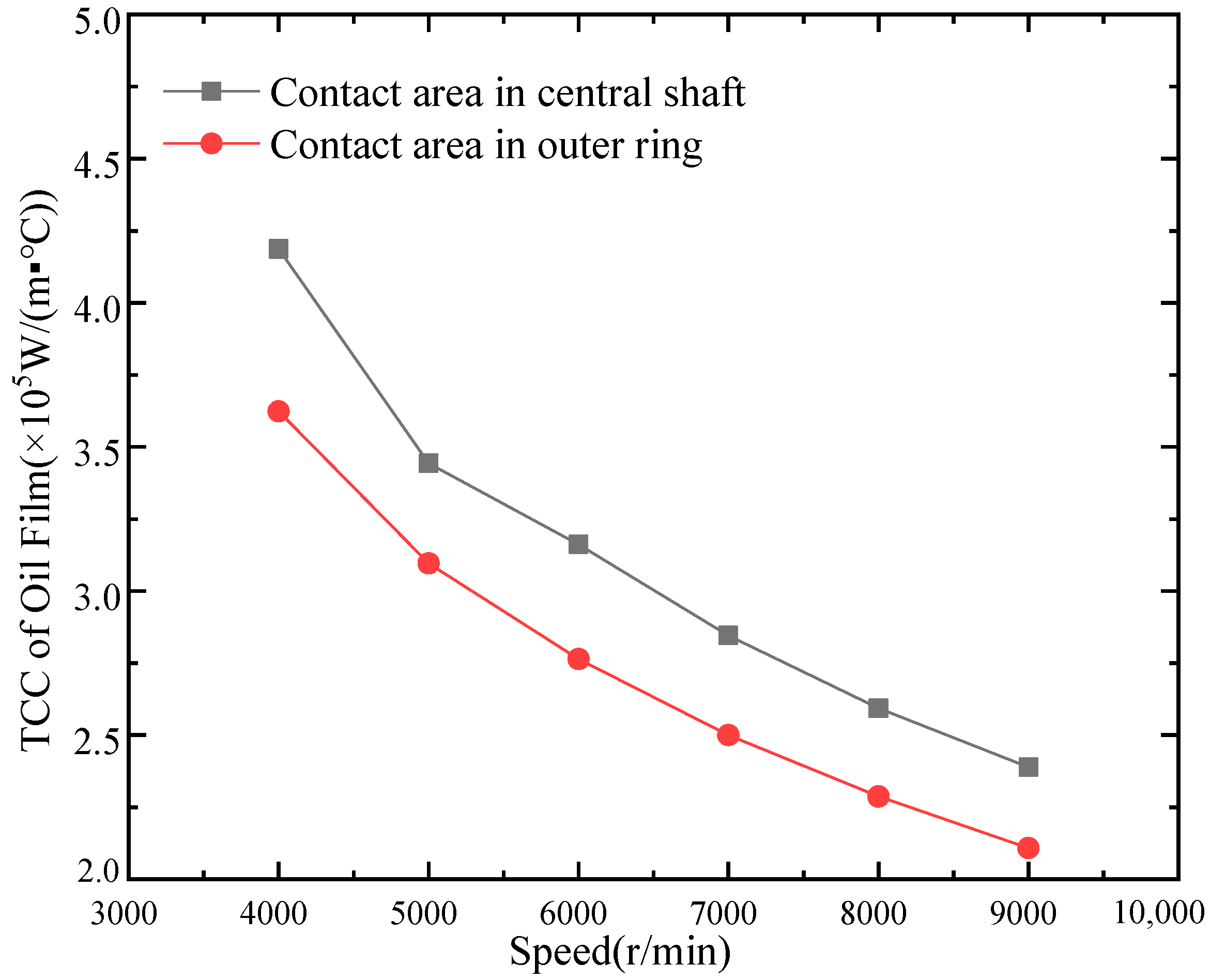
4.2.2. Thermal Conductivity Coefficient of Oil Film
4.3. Thermal Analysis Simulation Process
4.3.1. Thermal Boundary Conditions
4.3.2. Analysis of Steady-State Temperature Field
- The influence of oil film thermal conductivity coefficient on bearing temperature.
- 2.
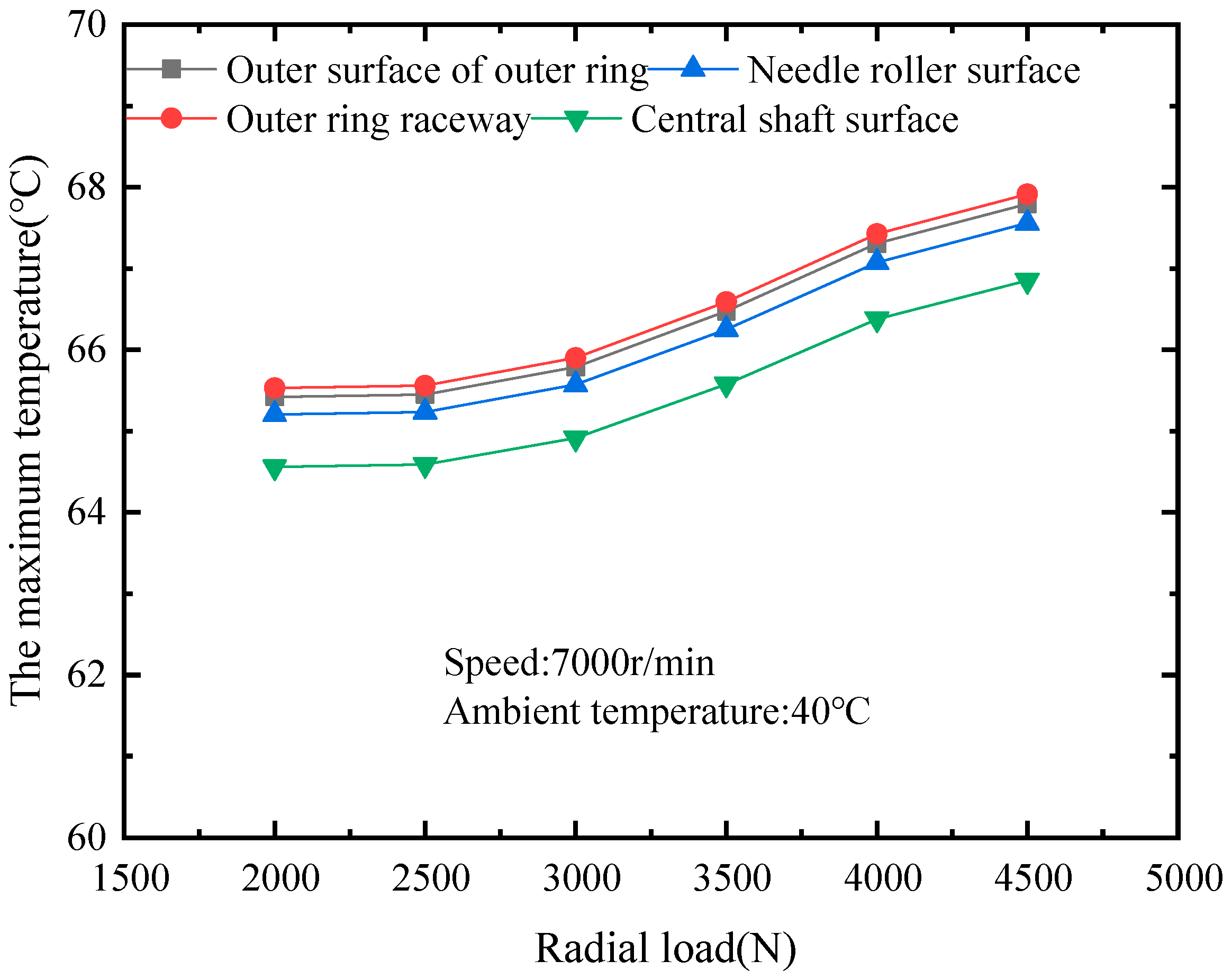
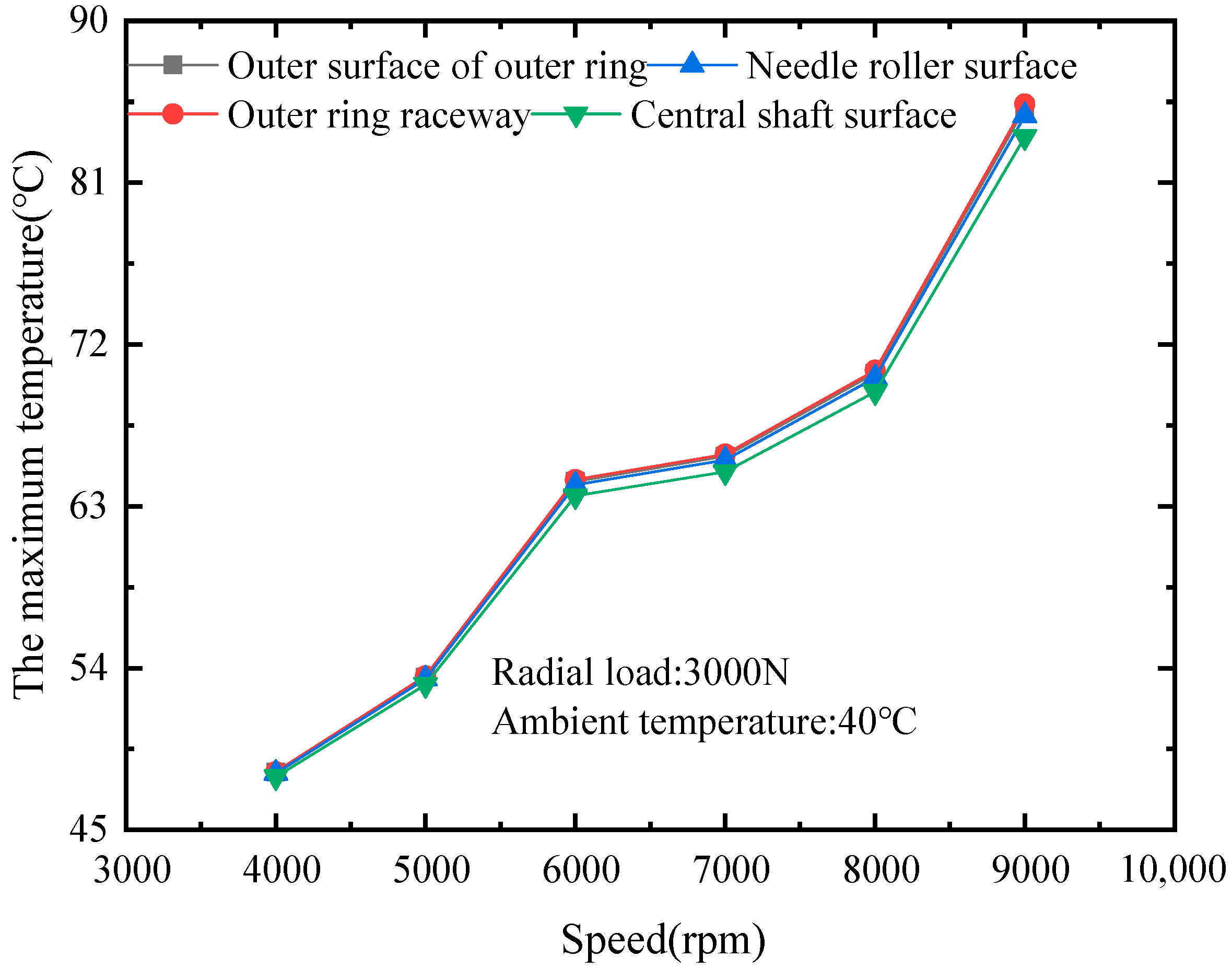
- The influence of operating parameters on bearing temperature.
5. Discussion of Simulation Results
6. Conclusions
- The multi-body dynamics method was used to obtain the dynamic performance of bearing, and the influence of friction power consumption on the bearing temperature was studied. The results showed that as the speed increases, the frictional power consumption of the bearing increases, and the maximum temperature of the bearing gradually increases. With the increase in the load, the frictional power consumption gradually increased, and the maximum temperature of the bearing also gradually increased. Compared with the speed, the load change had a relatively small effect on the temperature of the bearing.
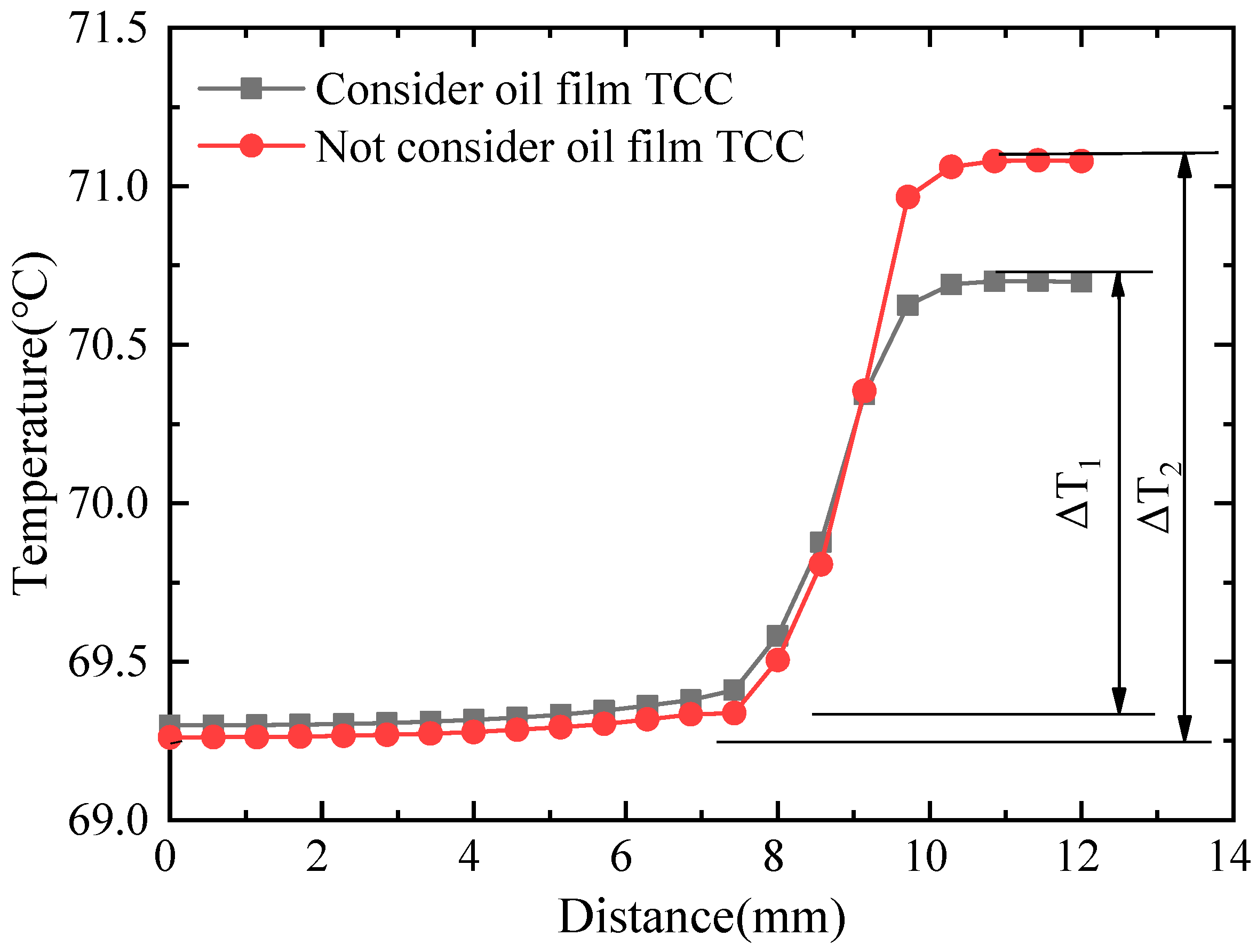
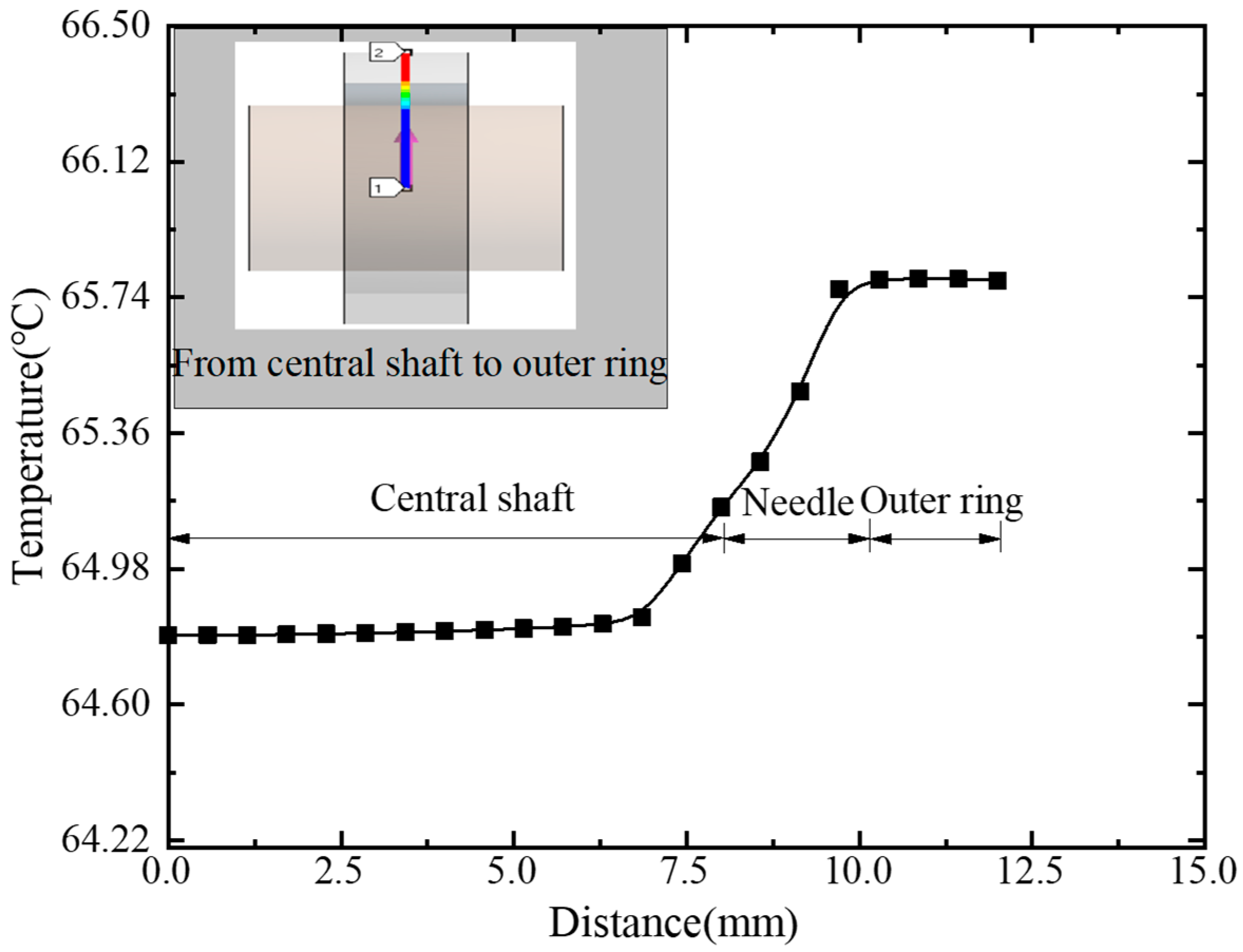
- We selected appropriate boundary conditions in the bearing thermal model to study the steady-state temperature field. The results showed that the temperature of the outer raceway is the maximum, and the temperatures of the needle roller surface, the outer ring surface, the inner raceway, and the central shaft core decreased, in order. The temperature difference between the inside and outside of a bearing was affected by the lubricating oil film in the contact area of the bearing. The presence or absence of the oil film can affect the temperature difference within and between the bearing and its external environment.
- According to an analysis of the heat generation characteristics of the bearing under the influence of multiple factors, the heat value created by the collision and sliding in a full-type needle bearing accounted for a considerable share. As a result, effective lubrication and timely lubricant replenishment should be employed in bearing applications. Under a high-speed condition, the influence of bearing thermal effects must also be considered. The temperature distribution of the bearing showed regularity. In addition, the highest temperature was distributed at the raceway. The high temperature rise reduced the hardness of the material, resulting in a contact fatigue failure between the needle roller and the raceway. To avoid that, the characteristics of the bearing material should be improved by controlling the heat treatment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Z.; Yu, X. Research on Cam Contact Force of OHC. J. Intern. Combust. Engines 2014, 6, 40–43. (In Chinese) [Google Scholar]
- Zhang, K.; Yuan, Z.; Sun, P. Dynamic Analysis on Rocker Arm Bearings Based on ANSYS/LS-DYNA. J. Bear. 2018, 3, 6–9. (In Chinese) [Google Scholar]
- Zhang, K.; Yuan, Z.; Sun, P. Analysis on Temperature Field of Rocker Arm Bearings Based on ANSYS/LS-DYNA. J. Bear. 2018, 11, 9–13. (In Chinese) [Google Scholar]
- Yanshuang, L.Z.W. Current situation and expectation of research on temperature field for rolling bearing. J. Mech. Transm. 2010, 34, 88–91. (In Chinese) [Google Scholar]
- Nassef, M.G.A.; Soliman, M.; Nassef, B.G.; Daha, M.A.; Nassef, G.A. Impact of Graphene Nano-Additives to Lithium Grease on the Dynamic and Tribological Behavior of Rolling Bearings. Lubricants 2022, 10, 29. [Google Scholar] [CrossRef]
- Wang, H.; Huang, H.; Yu, S.; Gu, W. The Effect of Surface Morphology of Tapered Rolling Bearings in High-Speed Train on Grease Lubrication. Lubricants 2020, 8, 76. [Google Scholar] [CrossRef]
- Palmgren, A. Ball and Roller Bearing Engineering, 3rd ed.; Burbank: Philadelphia, PA, USA, 1959; pp. 30–40. [Google Scholar]
- Ma, Z.; Li, J.; He, D.; Liu, B.; Zhang, J. Analysis on Thermal Characteristics of High-Speed Cylindrical Roller Bearings Based on Finite Element Method. J. Bear. 2018, 1, 19–22, 51. (In Chinese) [Google Scholar]
- Hatazawa, T.; Kawaguchi, T. Frictional torque of needle roller thrust bearings. J. Tribol. Trans. 2008, 52, 127–132. [Google Scholar] [CrossRef]
- Li, B.; Wang, H.; Bi, L. Analysis of temperature field of cylindrical roller bearing based on friction effect. J. Lubr. Eng. 2016, 41, 5–9. (In Chinese) [Google Scholar]
- Wang, L.Q.; Chen, G.C.; Gu, L.; Zheng, D.Z. Study on heat generation of high-speed cylindrical roller bearings. J. Lubr. Eng. 2007, 32, 8–11. (In Chinese) [Google Scholar]
- Wang, L.Q.; Chen, G.C.; Gu, L.; Zheng, D.Z. Study on operating temperature of high-speed cylindrical roller bearings. J. Aerosp. Power 2008, 23, 179–183. (In Chinese) [Google Scholar]
- Subramaniam, S.B.; Harsha, R.D.; Vivek, M.; Prasad, V.D. Thermal Analysis of Ceramic Conventional Ball Bearings. J. Indian J. Sci. Technol. 2016, 9, 1–8. [Google Scholar] [CrossRef]
- Liming, L.; Guowen, Z. FEM of Temperature Field of Rolling-sliding Compound Bearing. J. Mecha. Trans. 2016, 40, 139–142, 176. (In Chinese) [Google Scholar]
- Lei, Z.; Xiao, S.; Wu, L. Analysis of the Oil Film Thermal Resistance and Its Influence on the Temperature Field of Angular Contact Ball Bearing. J. Mach. Des. Manuf. 2014, 5, 201–204. (In Chinese) [Google Scholar]
- Yang, Y.; Zhu, R.; Miaomiao, L.I.; Qin, W.; Xie, P. Temperature Field Analysis of Angular Contact Ball Bearings Based on ANSYS Workbench. J. Mach. Build. Autom. 2019, 48, 67–69. (In Chinese) [Google Scholar]
- Deng, S.E.; Jia, Q.Y. Design Principle of Rolling Bearings, 2nd ed.; China Standard Press: Beijing, China, 2014; pp. 245–260. [Google Scholar]
- Ma, Y.; Su, B.; Liu, Y.Y. An Improvement on Traction Measurement System. In Proceedings of the 2018 International Conference on Computer, Communications and Mechatronics Engineering, Cuernavaca, Mexico, 26–29 November 2018; Destech Publications: Lancaster, PA, USA, 2018; pp. 678–681. [Google Scholar]
- Harris, T.A.; Kotzalas, M.N. Advanced Concepts of Bearing Technology: Rolling Bearing Analysis; CRC Press: Boca Ratoon, FL, USA, 2006; pp. 148–153. [Google Scholar]
- Wen, S.Z.; Huang, P. Principle of Tribology, 5th ed.; Tsinghua University Press: Beijing, China, 2018; pp. 53–60. [Google Scholar]
- Pouly, F.; Changenet, C.; Ville, F.; Velex, P.; Damiens, B. Investigations on the power losses and thermal behavior of rolling element bearings. JPI Mech. Eng. J J. Eng. 2010, 224, 925–933. [Google Scholar]
- Butron, R.A.; Staph, H.E. Thermally activated seizure of angular contact bearing. J. ASLE Trans. 1967, 10, 408–417. [Google Scholar]
- Watanabe, Y.; Katayama, A. Rolling Bearing for Rocker Arm: US Patent. US7614374 B2, 10 November 2009. [Google Scholar]
- GB/T 24607-2009. Rolling Bearings-Test and Assessment for Life and Reliability. China Standards Press: Beijing, China, 2009; pp. 1–15.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Outer diameter/mm | 24 |
| Outer ring width/mm | 6.9 |
| Central shaft width/mm | 17.3 |
| Pitch diameter/mm | 16.4 |
| Needle diameter/mm | 2 |
| Needle length/mm | 6.8 |
| Number of rollers | 26 |
| Speed/r/min | Radial load/N | The Minimum Inner Oil Film Thickness/mm | The Minimum Outer Oil Film Thickness/mm | Contact Width/mm | The Contact Force/N | The Force of Adjacent Rollers/N |
|---|---|---|---|---|---|---|
| 4000 | 3000 | 2.30 × 10−4 | 2.70 × 10−4 | 0.0297 | 479 | 0.64 |
| 5000 | 2.80 × 10−4 | 3.40 × 10−4 | 0.0297 | 479 | 0.67 | |
| 6000 | 3.10 × 10−4 | 3.50 × 10−4 | 0.0297 | 479 | 1.17 | |
| 7000 | 3.40 × 10−4 | 3.90 × 10−4 | 0.0297 | 479 | 1.42 | |
| 8000 | 3.70 × 10−4 | 4.20 × 10−4 | 0.0297 | 479 | 1.72 | |
| 9000 | 4.00 × 10−4 | 4.60 × 10−4 | 0.0297 | 479 | 2.54 | |
| 7000 | 2000 | 3.70 × 10−4 | 4.20 × 10−4 | 0.0242 | 320 | 1.18 |
| 2500 | 3.50 × 10−4 | 4.00 × 10−4 | 0.0271 | 400 | 1.47 | |
| 3000 | 3.40 × 10−4 | 3.90 × 10−4 | 0.0297 | 479 | 1.42 | |
| 3500 | 3.30 × 10−4 | 3.80 × 10−4 | 0.0322 | 638 | 1.38 | |
| 4000 | 3.30 × 10−4 | 3.80 × 10−4 | 0.0343 | 728 | 1.36 | |
| 4500 | 3.20 × 10−4 | 3.70 × 10−4 | 0.0365 | 818 | 1.52 |
| Parameters | Value |
|---|---|
| Load/N | 2580 |
| Rotational speed of outer ring/rpm | 7000 |
| Lubricant | engine oil 10W-30 |
| Oil temperature/°C | 40 |
| Ambient temperature/°C | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Su, B.; Liu, F.; Zhang, W.; Yang, H. Thermal Analysis Based on Dynamic Performance of Rocker Arm Full-Type Needle Bearings. Lubricants 2022, 10, 104. https://doi.org/10.3390/lubricants10050104
Zhang G, Su B, Liu F, Zhang W, Yang H. Thermal Analysis Based on Dynamic Performance of Rocker Arm Full-Type Needle Bearings. Lubricants. 2022; 10(5):104. https://doi.org/10.3390/lubricants10050104
Chicago/Turabian StyleZhang, Guangtao, Bing Su, Fengbo Liu, Wenhu Zhang, and Haisheng Yang. 2022. "Thermal Analysis Based on Dynamic Performance of Rocker Arm Full-Type Needle Bearings" Lubricants 10, no. 5: 104. https://doi.org/10.3390/lubricants10050104
APA StyleZhang, G., Su, B., Liu, F., Zhang, W., & Yang, H. (2022). Thermal Analysis Based on Dynamic Performance of Rocker Arm Full-Type Needle Bearings. Lubricants, 10(5), 104. https://doi.org/10.3390/lubricants10050104