3.1. Transition between Friction Modes in Adhesive Contact as a Result of Degradation of Adhesive Properties of Contacting Surfaces
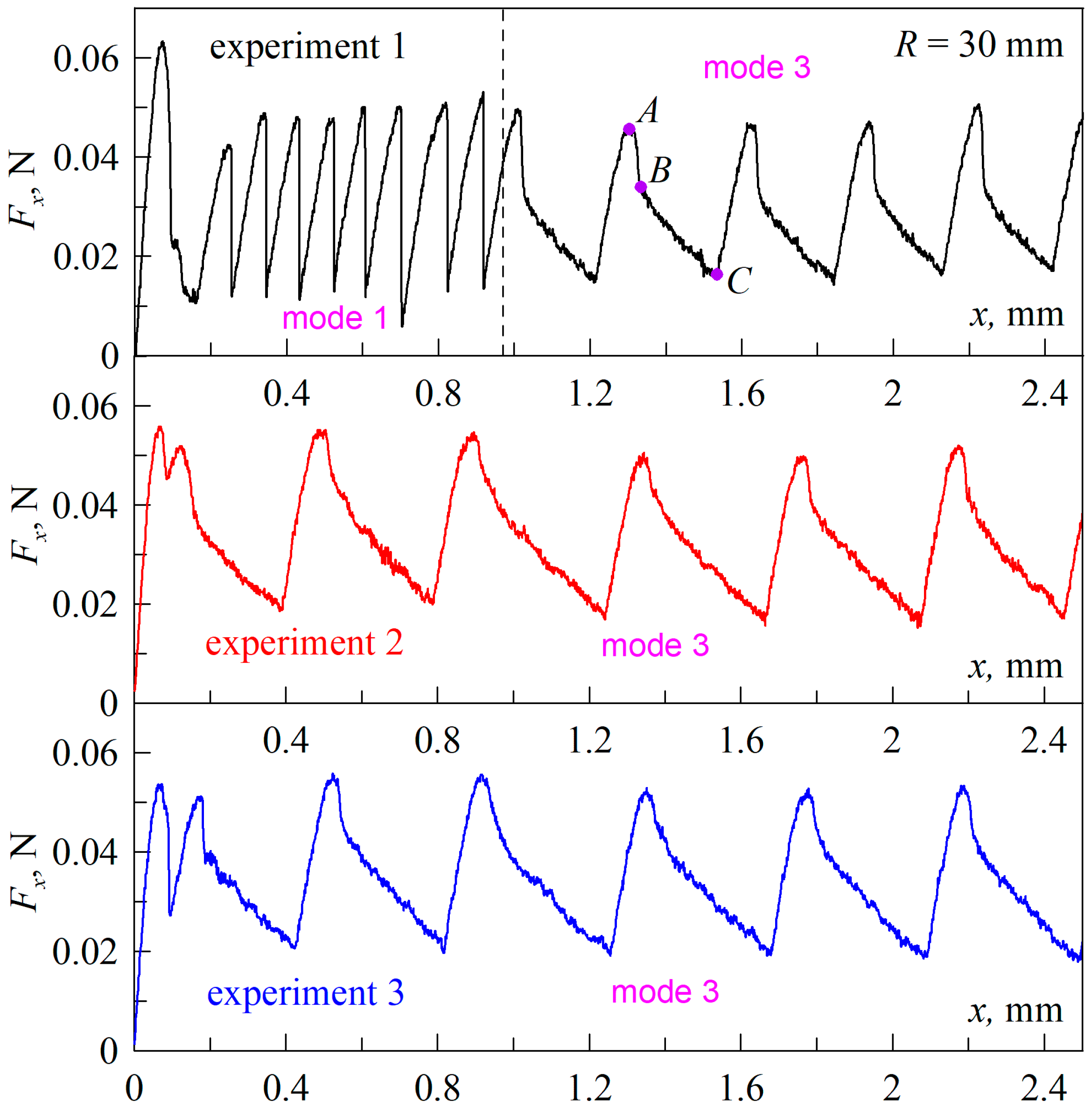
Figure 2 shows the experimentally measured dependencies of the friction force
Fx on the value of tangential displacement
x of the indenter, where the results of three consecutive experiments are depicted in different panels. In each experiment, the indenter was first immersed to a depth of
dmax = 0.2 mm then pulled to a zero level of
d = 0.0 mm, followed by tangential displacement. Moreover, the initial indentation to a depth of
dmax in all experiments was carried out at the same location of the elastomer to ensure the same experimental conditions.
Figure 2 shows the dependence plots corresponding to tangential shear without indentation and detachment phases in the normal direction, where the indenter was not horizontally displaced (i.e.,
x = 0 mm). In the first experiment (upper panel), after the motion starts, the tangential force first increases to some maximum and then decreases. This maximum is associated with additional strengthening of the contact during normal indentation when tangential shift did not occur; a similar situation was observed in [
22] for another geometry of the experiment and much bigger sliding velocities. At further shear, as it follows from the figure, a stationary mode of stick–slip friction mode is established, which we denote as “mode 1”. In this stick–slip mode, once the friction force reaches its maximum value, it decreases sharply, which can only be due to gross slip, i.e., “mode 1” is a stick–slip mode in the classical sense. Such a mode can be theoretically described within the framework of models existing in the literature, such as, for example, [
25]. However, in the present work, we limited ourselves to a detailed description of the experiment.
In order to realize the stick–slip motion, it is necessary for the system to be able to store elastic energy that is released during the slip phase. The stick–slip mode is often studied using examples of systems in which one of the rubbing surfaces is displaced by a spring, the free end of which moves at a constant velocity [
26,
27]. In this case, the elastic energy is stored in the spring, and as soon as the contact stresses exceed a critical value, the rapid slip phase takes place. In the slip phase, the spring tension decreases, and in order for the tension to reach the critical value again, time is required during which the contacting surfaces come to rest. As a result, a stick–slip friction mode is established, in which periods surfaces stopping alternate with periods of rapid slipping. Any elastic body with a stiffness much smaller than the tangential contact stiffness, such as a cantilever in AFM (atomic force microscopy) experiments, in which the stick–slip mode is also observed, can act as a spring [
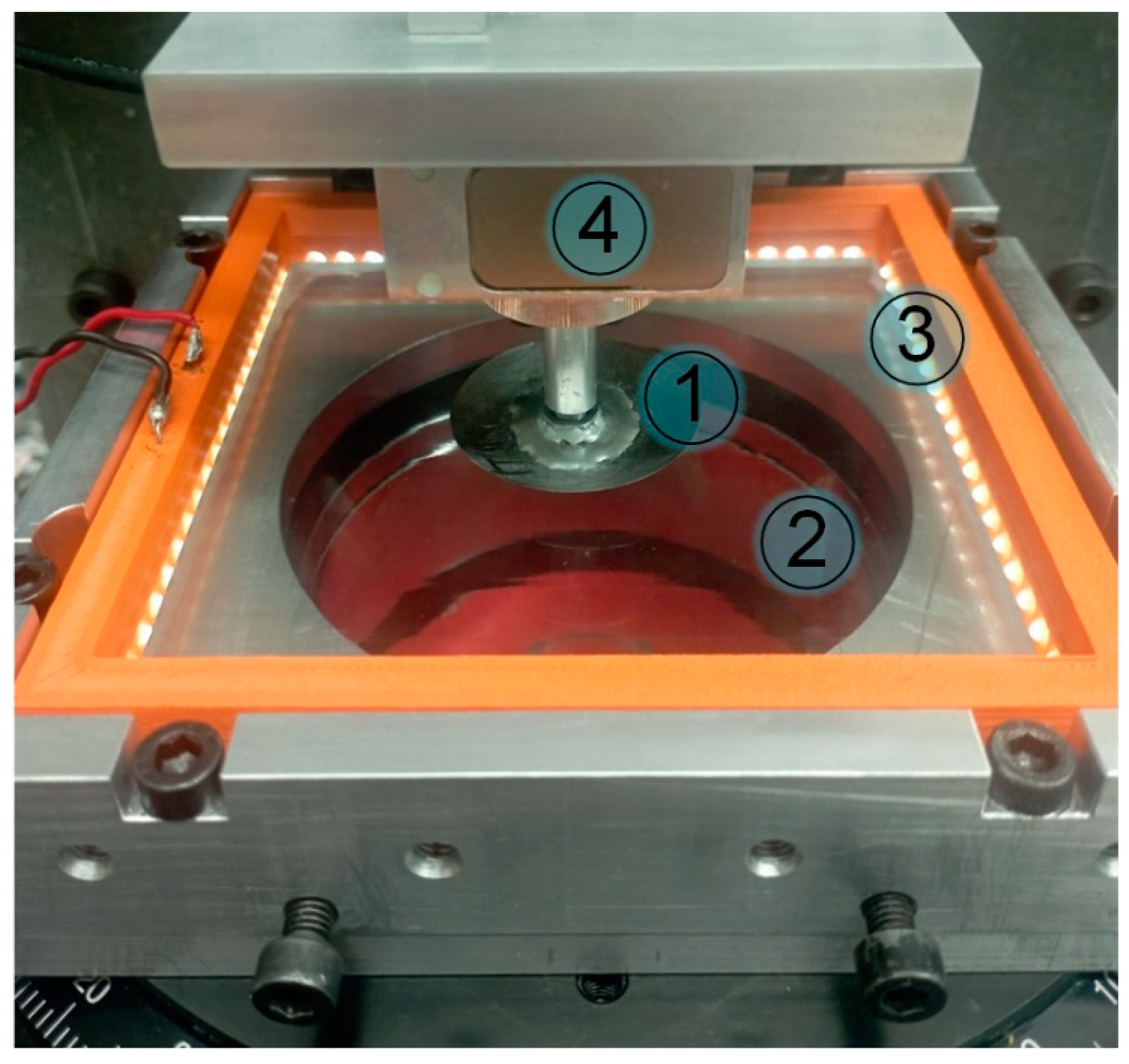
28]. In the experiment, the results of which are shown in
Figure 2, the indenter (upper rubbing surface) is rigidly connected to the driving actuator and is displaced at a constant velocity. In this case, the elastic energy is accumulated by deforming a part of the rubber layer in the contact area, because the rubber surface in the stick phase moves together with the indenter. When the shear stresses exceed the critical stresses, the rubber slips over the indenter with the release of elastic energy and the friction force decreases dramatically (“mode 1” in
Figure 2). Therefore, in the described experiment, there is no rapid movement of the whole rubber sheet (lower rubbing surface) or the indenter (upper rubbing surface); the indenter always moves at a constant velocity, and the rubber rests on a rigidly fixed glass substrate.
It is worth noting that in the experiment, the indenter is shifted at a very low velocity
v = 1 μm/s to ensure quasi-static contact conditions. During the “stick” phase, the contact can be considered quasi-static because the elastomer surface moves together with the indenter. However, during the “slip” phase, the elastomer slips over the indenter surface at a much higher velocity, exceeding the value at which the contact can be considered quasi-static. Therefore, to describe the observed contact processes, even with the indenter moving at very low velocities, it is necessary to take into account viscoelastic effects, which significantly complicates the theoretical description of the problem [
29,
30]. There are also studies that investigate the influence of velocity on contact properties, such as, for instance, [
22,
24].
The top panel in
Figure 2 shows that over time, the stick–slip mode, denoted as “mode 1”, is replaced by another mode, labeled “mode 3”. In “mode 3”, there is no phase of global slippage of the rubber on the indenter surface because of the absence of a sharp decrease in the friction force. Note that the form of friction force–displacement dependence in “mode 3” is typical for adhesive contacts at shallow indentation depths, and such dependencies were observed by us in previous works, such as, for example, [
31,
32]. Such a “mode 3” was thoroughly analyzed in our latest work [
33] in which extensive analysis was conducted based on existing theories of tangential adhesive contact. In [
33], it was shown that such a mode consists of alternating phases, such as attachment, stick, peeling, and sliding, which periodically repeat.
The different panels in
Figure 2 show the results of three consecutive experiments, where only “mode 3” was observed in the second and third experiment. In order to eliminate the influence of individual elastomer surface characteristics, the indenter motion started at the same location on the rubber substrate in each experiment. From a comparison of all of the curves in
Figure 2, an interesting feature emerges. On the dependencies
Fx(
x), which correspond to “mode 3”, after the friction force reaches its maximum value, its rapid decrease is observed for some time (section
AB), although it is not instantaneous as in the stick–slip mode (also known as “mode 1”). After a rapid decrease in the friction force, it continues to decrease, although now much more slowly (section
BC). When the friction force becomes minimal (point
C), it starts to increase to its maximum value again. The above-mentioned peculiarity consists in the fact that as time passes, the section
AB, where the friction force rapidly decreases after reaching the maximum value, becomes shorter, whereas the section
BC, on the contrary, becomes longer. As a result, the period of transitions between maxima and minima of the friction force, observed in the
Fx(
x) dependencies, increases.
It has already been mentioned above that in the first experiment (upper panel in
Figure 2), after the start of indenter shear, the frictional force reaches some maximum value, which is significantly higher than the maximal force during further indenter shear. This maximum of
Fx during the transition from static to kinetic friction is due to the fact that the initial contact is stronger than the contact after the first act of slip in the kinetic regime [
34]. However, no such high peaks are observed in the next two experiments (middle and bottom panels in
Figure 2), i.e., the contact before shear has the same strength as in the steady kinetic regime. This fact suggests that the adhesive strength of the contact decreases with time. The decrease in the shear strength of the contact was observed by us in previous works and was expressed as a decrease in the steady-state value of the friction force and shear stresses in the sliding mode [
32]. The adhesive strength of the contact depends on the surface energy of the contacting bodies, which determines the specific work of adhesion Δ
γ. It has been repeatedly shown that freshly cleaned surfaces have the highest value of Δ
γ, which decreases with time due to the oxidation of friction surfaces, their contamination, etc. We attribute the transition between “mode 1” and “mode 3”, observed in the upper panel of
Figure 2, to the decrease in the specific work of adhesion Δ
γ due to the contamination of the indenter surface during friction. Thus, large values of Δ
γ should correspond to “mode 1”. It should be noted that if the indenter is left exposed to air for some time before the experiment (for example, for one day), then “mode 3” will be observed immediately in the experiment. This is because the adhesive properties of the freshly treated surface of the indenter degrade rapidly, particularly due to surface oxidation. This is one of the reasons why we did not observe such a transition between modes earlier, as we did not conduct experiments immediately after cleaning the indenter. However, in any case, during interaction with the elastomer surface in the experiment, the adhesive properties of the indenter surface degrade much faster than when it is passively exposed to the air.
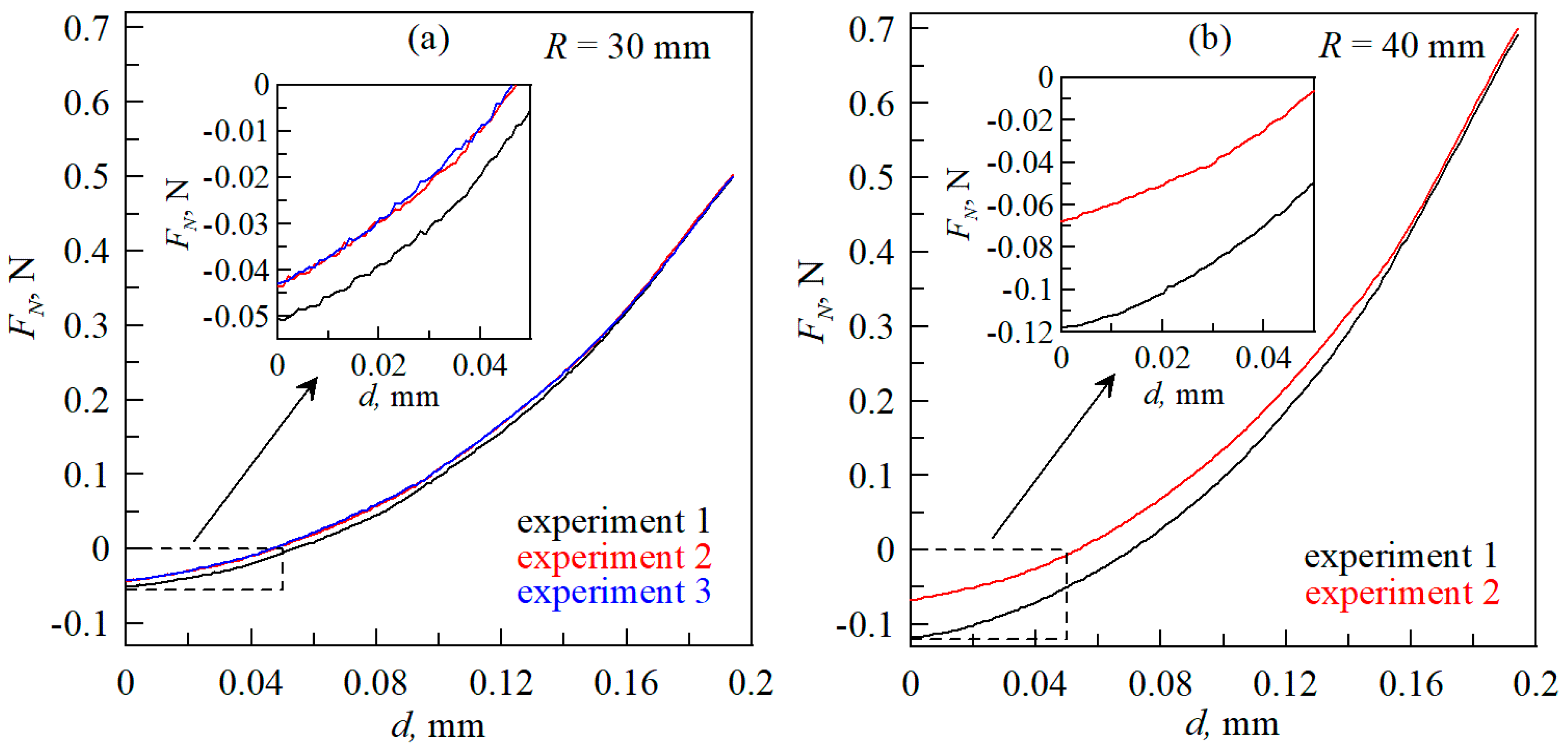
The assumption that the transition between “mode 1” and “mode 3” is caused by a decrease in the specific work of adhesion Δ
γ is also supported by the results shown in
Figure 3. This figure shows the dependencies of the normal force
FN on the indentation depth
d in the indenter pulling phase after the initial indentation to a depth of
dmax = 0.2 mm (in the figure, the dependencies do not reach the value of 0.2 mm because of the range of instrument backlash, which is described in
Section 2 of the article).
Figure 3a shows three curves corresponding to three consecutive experiments, the results of which are shown in
Figure 2. All of the dependencies in
Figure 3a correspond to the indenter pulling back to the zero level, and, after reaching that level, the indenter already starts to shift in the tangential direction.
Figure 3 shows that the highest absolute value of the adhesion force
FN < 0 N is realized in the first experiment, while the following two experiments show similar adhesion forces. But, according to
Figure 2, only in the first experiment the transition between friction modes takes place, while in the second and in the third experiments, only “mode 3” is realized. The data shown in
Figure 3b show the dependencies of normal forces on indentation depth for two consecutive experiments, which are similar to those discussed above, only with an indenter with a radius
R = 40 mm.
Figure 3b also shows a decrease in the adhesive force in the second experiment compared to the first one. Thus, the data shown in
Figure 2 and
Figure 3 complement each other and speak in favor of the fact that the change in friction modes is caused by contamination of the indenter surface, which occurs due to its interaction with the elastomer during the contact.
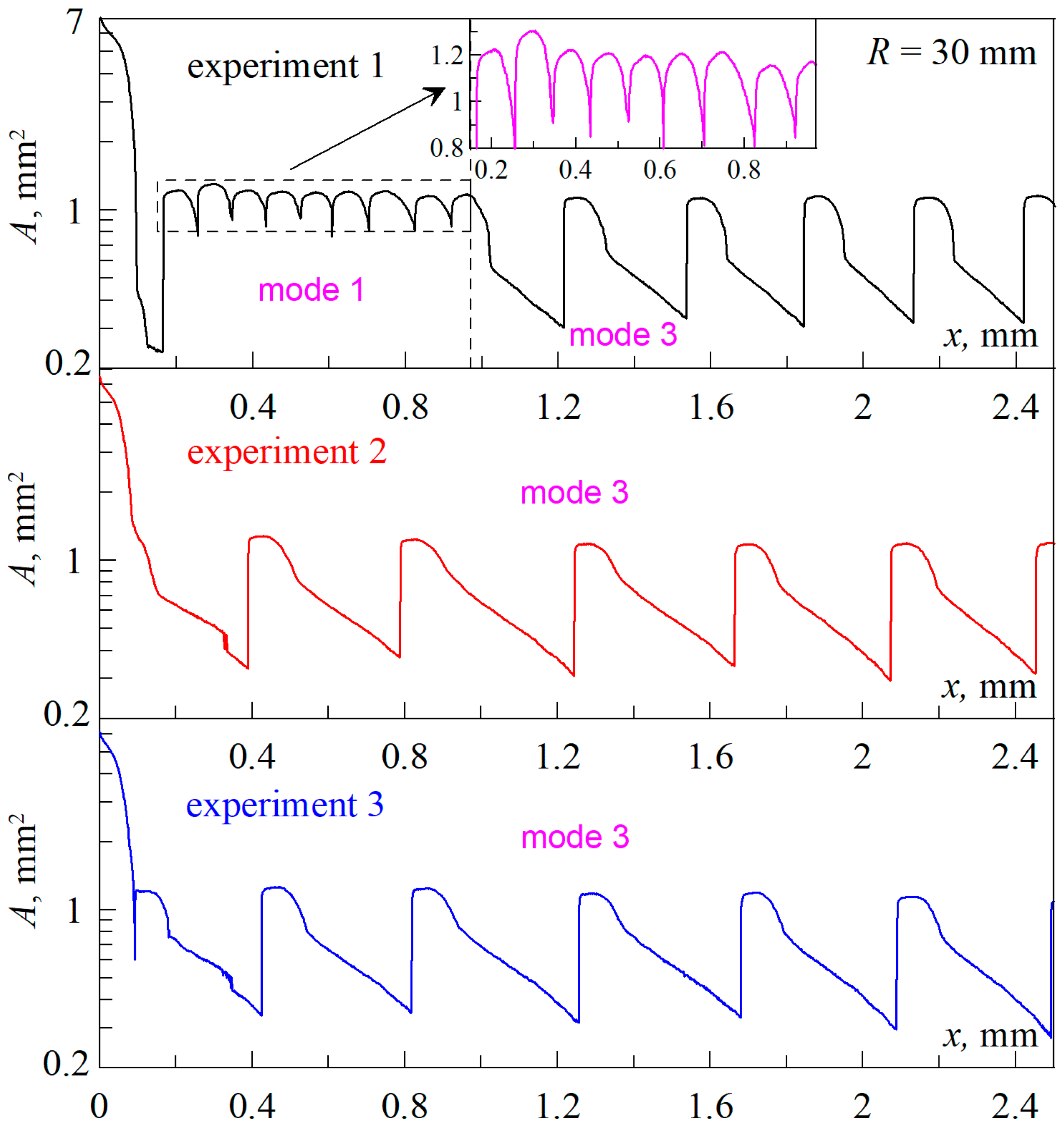
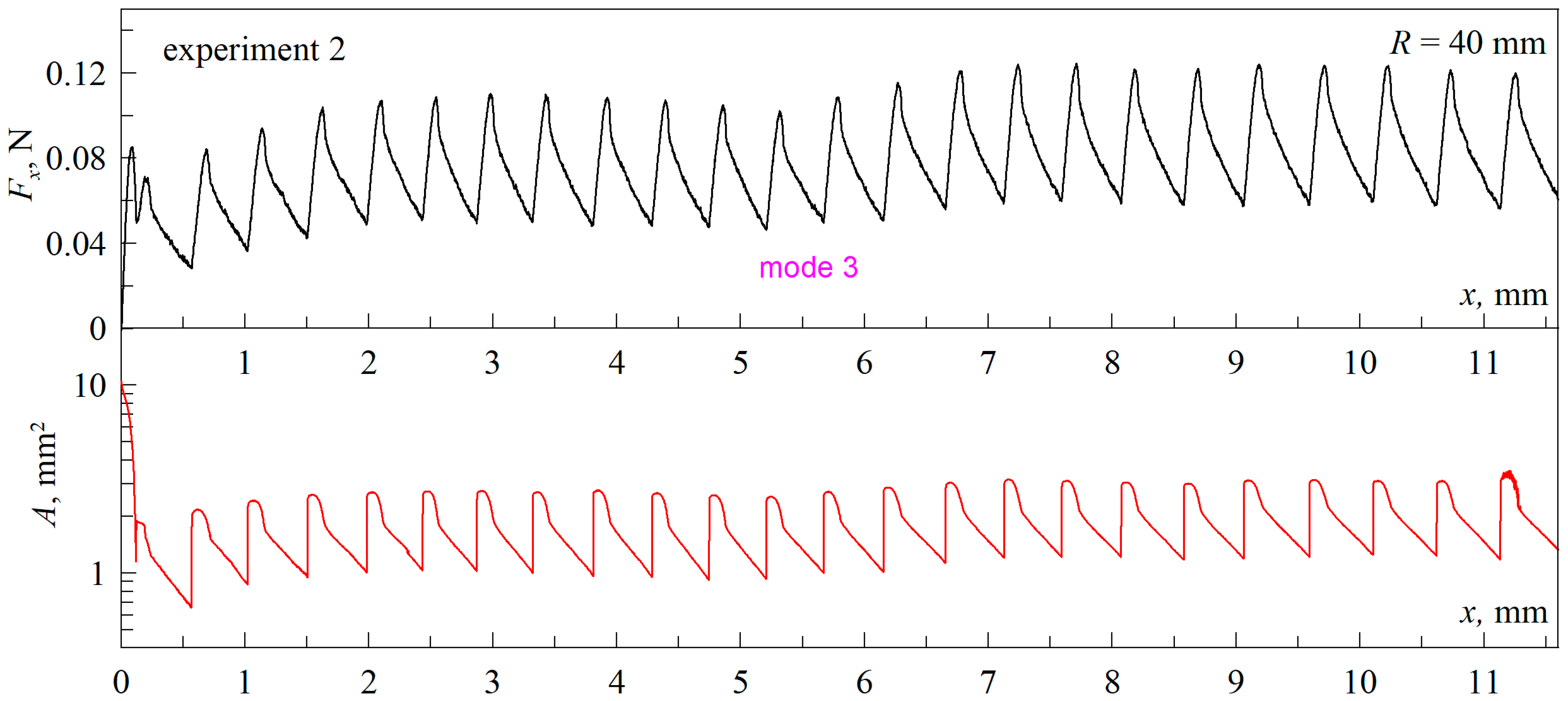
Figure 4 shows the dependence of the contact area
A on the indenter shear
x, which complements the experimental data shown in
Figure 2. In order to show the initial decrease in area from a much larger value of
A ~ 7 mm
2 along with the periodic stationary regime, in which
A ~ 1 mm
2, the ordinate axis is presented on a logarithmic scale.
Figure 4 shows that in stick–slip mode (“mode 1”), the contact area
A varies within a small range, while in “mode 3” the area varies much more. Our previous work [
31,
32] studied in detail the nature of contact propagation in the stationary regime, which resembles “mode 3”, but in the mentioned work, the case of an indentation depth
d significantly different from zero was considered. Here (
Figure 2 and
Figure 4), we study the situation when the indentation depth
d is close to zero and the contact exists mainly due to adhesion. Therefore, this case requires additional analysis, which is carried out in the next section of the paper.
3.2. Detailed Analysis of the Nature of Contact Propagation
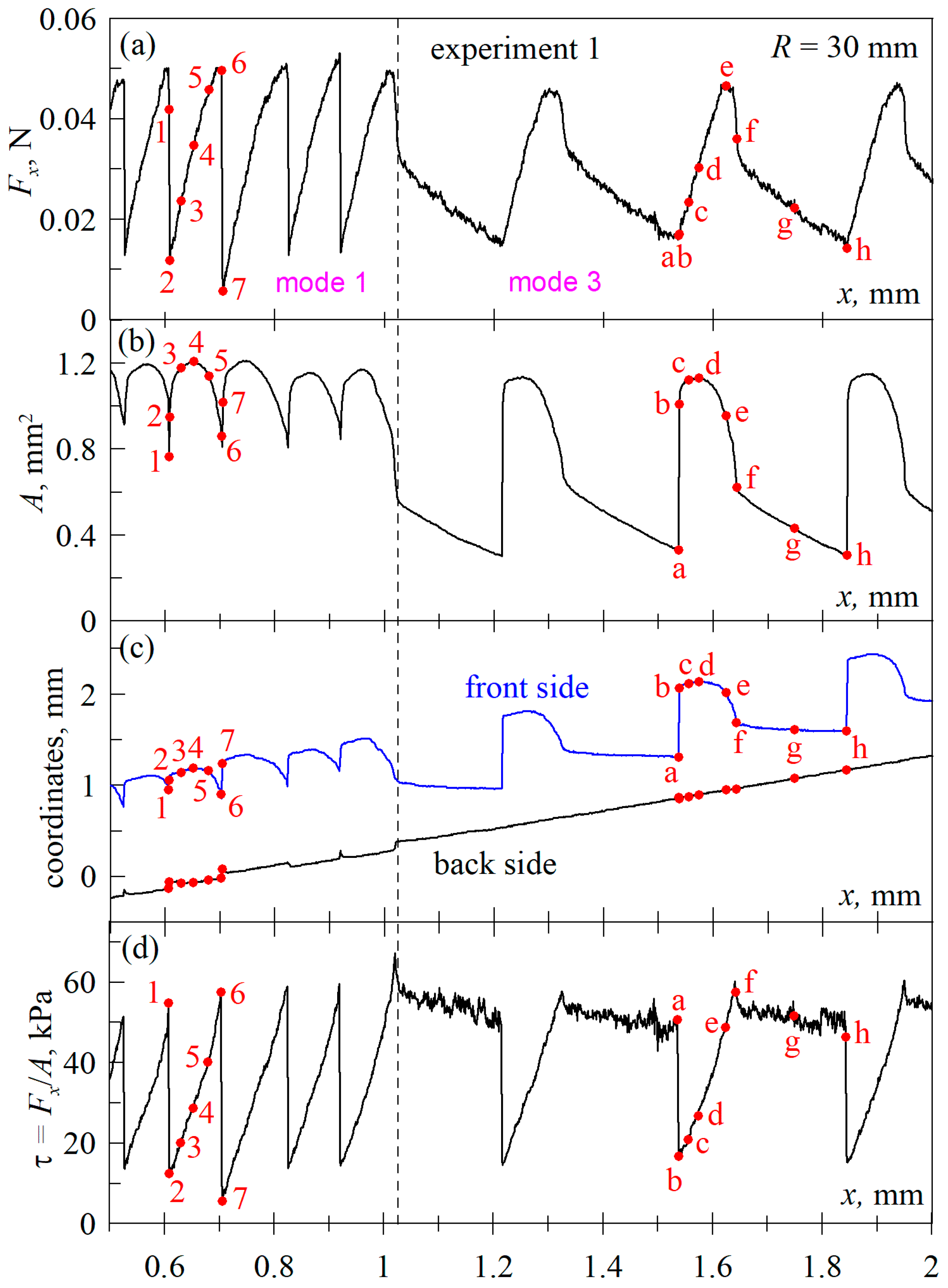
Figure 5 shows the dependencies corresponding to the first experiment, the data of which are presented in
Figure 2 and
Figure 4. In
Figure 5, the region of the dependencies in which the transition between modes “mode 1” and “mode 3” takes place is depicted in detail. Additionally,
Figure 5 shows the dependencies for the coordinates of the front and back contact edges, as well as the average value of the tangential stresses
τ =
Fx/
A. Note that the difference between the “front side” and “back side” coordinate values in
Figure 5c at each fixed indenter coordinate
x is the contact width measured in the direction of indenter motion. In the case of a circular contact, the width thus measured will coincide with its diameter.
Let us first consider the stick–slip mode (“mode 1”), which exists up to the vertical dashed line shown in
Figure 5. In all dependencies in
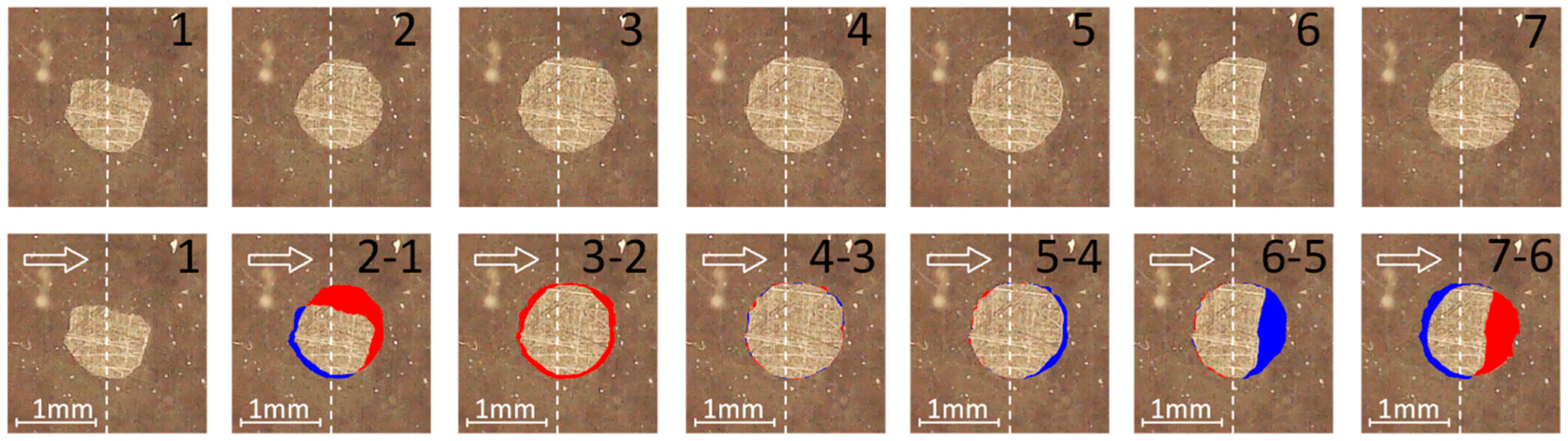
Figure 5, the numbers from one to seven show characteristic points corresponding to moments for which pictures of the contact area are shown in the top row in
Figure 6. The bottom row in
Figure 6 shows the same photos as in the top row, but the colors indicate differences between adjacent contact areas. Blue shows areas that have come out of contact and red shows areas that have come back into contact. This, however, does not apply to the first picture “1” in the bottom row, which is exactly the same as the corresponding image in the top panel.
Let us note one important point for understanding. In
Figure 6, the contact configurations and their changes are shown in the coordinate system that is associated with the indenter, i.e., the indenter is assumed to be stationary. At the same time, the coordinate dependencies of the back and front of the contact boundary, which are shown in
Figure 5c, are shown in the coordinate system associated with the rubber substrate, i.e., here, the elastomer into which the indentation is made is considered to be stationary. Therefore, for example, in the case where the rear edge of the contact is moving at the same speed as the indenter,
Figure 6 will show no change in the rear edge, and
Figure 5c will show a linear increase in the “back side” coordinate.
Let us now analyze the contact realignment process based on the figures presented above. Point 1 in
Figure 5 is selected just before the next contact propagation. This point corresponds to the friction force
Fx close to the maximum, as well as the maximum contact stresses
τ. At the neighboring point 2, there is a jump in the contact area when the region at the front edge, shown in red in panel “2–1” in
Figure 6, is joined. In addition to the discontinuous joining of a new contact area, there is a global slip of the rubber over the indenter surface in the entire contact area as the friction force decreases discontinuously, as demonstrated by trajectory 1–2 in the
Fx(
x) dependence. As the contact slips and recovers, its size becomes slightly smaller on the back edge, as can be seen in panel “2–1” in
Figure 6. The reason for this reduction is that part of the contact at the back edge, prior to slippage, existed due to normal adhesion, and it takes time to restore it. At global slip 1–2, the elastic energy stored in the deformed rubber layer sample is released, and for the next slip cycle (points 6–7), the rubber layer must deform again to the critical state to which the maximum values of friction force
Fx and tangential stresses
τ correspond. Note that the force
Fx before global slippage always takes locally maximal values. The reason that the friction force at point 1 is not maximal is due to the fact that the contact characteristics (contact forces and photos of the contact area) are saved in the experiment with a small frequency of once per second, and the next preservation at point 1 occurred after the beginning of global slippage. After the act of slippage, the friction force and shear stresses increase monotonically (path 2–3–4–5–6). However, the contact area on this site behaves non-monotonically, which was observed earlier in [
32]. The friction force in the stationary sliding mode is defined by the expression
where
τ0 is the critical stress at which sliding is realized. According to (1), as the area
A increases, the tangential force
Fx also increases. However, this is only true for those systems in which the stresses
τ0 takes on constant values over the entire contact region. And, here we have a case with a complex inhomogeneous stress distribution. For example, in the photo “2–1” in
Figure 6, the shear stresses in the “fresh” contact region at the front edge (shown in red) have close to zero values because it is a newly formed region after global slippage and has not yet been loaded by the tangential motion of the indenter. In the rest of the contact region, non-zero stresses
τ are realized, and they are the ones that provide the non-zero force
Fx. However, the stresses
τ for this configuration (point 2) are significantly lower than the maximum value of
τ0, because global slip across the contact region (path 1–2) and the release of elastic energy have just occurred.
In addition to the above, it should also be taken into account that in a tangential contact, the maximum stresses are realized at its boundary [
35]. Because contact failure begins when the stress reaches its maximum value, as the tangential force increases, contact failure will begin at the edge of the contact, as seen, for example, in panel “5–4” in
Figure 6, which demonstrates the partial detachment of the rubber from the indenter at the front edge of the contact. The next panel of the figure “6–5” shows a significant reduction of the contact area due to its failure at the front edge, which corresponds to the moment of onset of global slippage at which the frictional force
Fx and the average tangential stresses
τ take their maximum values. During further slipping, the tangential stresses decrease across the entire contact area, with immediate contact regaining at its front edge when the tangentially unloaded area is joined (red area in panel “7–6” in
Figure 6). The contact configuration in panel 7 in
Figure 6 is similar to panel 2, as they correspond to the moments immediately after slip and the minimums of the force
Fx. The described process is repeated periodically in time and corresponds to a stationary stick–slip motion in which, however, the minimum and maximum values of the tangential force
Fx and the contact area
A vary in some range. Such variations occur due to the fact that compared to the quasi-static shear of the indenter with a very small velocity, the process of global slippage of the rubber on the indenter surface is almost instantaneous. Therefore, an essential role here is played by the individual characteristics of the contact before the slip phase, which are always different in a real experiment (specific contact configuration, stress distribution, surface energy distribution of the contacting surfaces, presence of inhomogeneities, etc.).
Let us note one interesting detail that is visualized in panel “3–2” in
Figure 6. Panel 2 of the figure is the contact configuration immediately after global slippage, and panel 3 is the next contact configuration that corresponds to the section of monotonic force buildup. What is common in panels 2 and 3 is that here the stresses
τ are still far from the critical value at which slip is realized. The characteristic mentioned above is that the contact area on panel 3 is slightly larger than on panel 2. The newly acquired contact areas are shown in red in the “3–2” panel, indicating homogeneous contact propagation on all sides. It has been shown many times before that the contact area can only decrease with tangential shear (see, e.g., [
36,
37]). The reduction of the area in the tangential contact is caused by tangential stresses, which, however, are quite small immediately after slip. Therefore, the increase in contact area shown in panel “3–2” is due to contact propagation in the normal direction (normal adhesion). This spreading of the contact due to normal adhesion, however, leads to only a small increase in the contact area, so that already in panel 4 of
Figure 6 the contact area is almost unchanged compared to panel 3 (see comparison panel “4–3”). The described contact rearrangement process is periodic in time and corresponds to a stable stick–slip mode, which we have labeled as “mode 1”.
According to
Figure 5, when the indenter is shifted further, the system switches from “mode 1” to “mode 3” and then continuously remains in “mode 3” (see also
Figure 2 and
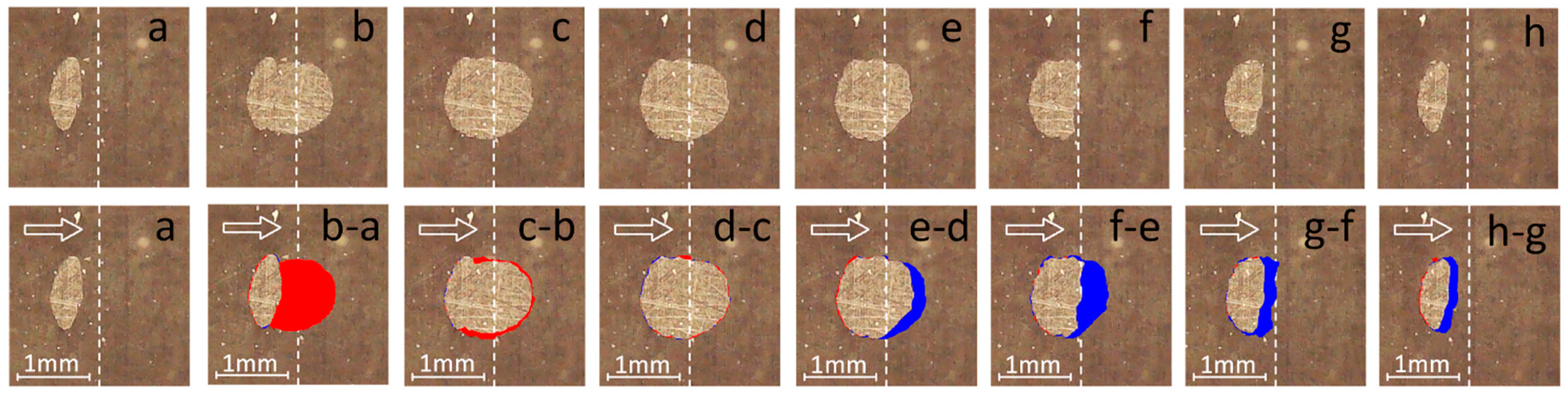
Figure 4). The characteristic points in “mode 3” are shown in the panels in
Figure 5 with the letters a–h, and
Figure 7 shows the corresponding contact configurations. The essential difference between “mode 3” and stick–slip “mode 1” is that in “mode 3” there is no global slipping of the rubber on the indenter surface and, therefore, the
Fx(
x) dependence does not show areas with a sudden decrease in the friction force. Point (a) in
Figure 5 corresponds to the minimal contact area
A and the tangential force
Fx. At this point, the maximum shear stresses
τ are realized over the entire contact area, which correspond to the value
τ0 at which sliding is realized. Neighboring point (b) corresponds to the attachment of a large section of rubber at the front of the contact, which is shown in red in
Figure 7, “b–a”. This fresh contact section is not tangentially loaded immediately after attachment because the friction force
Fx at points (a) and (b) takes on the same values (see
Figure 5). Because the contact area
A increases drastically at point (b), formally, the average tangential stresses
τ decrease, as demonstrated by
Figure 5d. In the section a–b–c–d–e, the friction force
Fx increases monotonically, while the contact area
A is non-monotonic. The reasons for this behavior have already been discussed above when describing “mode 1” and are due to the inhomogeneous distribution of tangential stresses in the contact zone.
The a–b–c–d–e section in “mode 3” has qualitatively similar features to the 2–3–4–5–6 section in “mode 1”, which is also evidenced by the bottom rows of the photographs in
Figure 6 and
Figure 7. Namely, in both cases, there is first a sharp increase in the contact area at the front edge, and then the contact area expands on all sides due to normal adhesion; after that, the contact area starts to decrease due to the rubber detaching from the indenter at the front edge. The corresponding dependencies of
Fx(
x) and
A(
x) in both modes are also visually similar. The main difference between the modes is observed at further indenter displacement. In “mode 1”, after point 6 (maximum friction force), a global slip is observed with a sudden decrease in the friction force to a minimum value. However, in “mode 3”, after the force
Fx reaches a maximum at point (e), it begins to decrease smoothly, because in “mode 3” the decrease in
Fx is not due to abrupt global slip but due to the continued detachment of the rubber at the front edge of the contact.
The maximum stress
τ =
τ0, at which the regime of homogeneous sliding of rubber on the indenter is established, is reached at the point (f), where the friction force is less than the maximum. Furthermore, in the sliding mode at section f–g–h, the stresses remain constant and the contact area
A decreases, which leads to a decrease in the frictional force
Fx (1). What is interesting here, however, is the nature of the contact area reduction. According to the dependencies shown in
Figure 5c, in “mode 3”, the back edge of the contact always moves linearly at the same speed as the indenter. This suggests that there is always a region of stationary slip in the contact region close to the back edge. Stationary sliding with constant velocity is observed in the indenter region, which is shown by the contact configurations with minimum areas
A in panels (a) and (h) of
Figure 7, and the maximum stress value
τ = τ0 is always realized in this contact region. The dependencies shown in
Figure 5c indicate that in the f–g–h section, the elastomer-related coordinate of the front edge remains almost constant. Thus, here, the back-contact boundary shifts with the speed of the indenter while the front boundary stands still as the contact area decreases. In the coordinate system associated with the indenter, this situation corresponds to contact failure at its front edge, as can be seen in panels f–g–h in
Figure 7 (see also the comparative photographs of the corresponding contact regions in the bottom row of
Figure 7). After point (h), further contact propagation occurs, and the process described above is repeated again.
We note another difference between the friction regimes discussed in this paper. As mentioned above, the dependencies shown in
Figure 5c demonstrate that in “mode 3” the back edge of the contact always moves at a constant velocity, which is the same as the shear rate of the indenter. This is due to the presence of a stationary slip zone at the back edge of the contact. However, in stick–slip “mode 1”, the contact line configuration on the back edge undergoes a change, as can be seen in
Figure 5c. The shape of the contact boundary changes during the next global slip of the rubber over the indenter surface, i.e., in the slip phase of the stick–slip mode. Next, in the stick phase, the back-contact boundary moves at the speed of the indenter but realigns again with another rubber slip. The process of rebuilding the contact can be clearly seen in the attached
supplementary videos (Videos S1–S7).
3.3. Transition Mode between Regimes with “High” and “Low” Specific Work of Adhesion
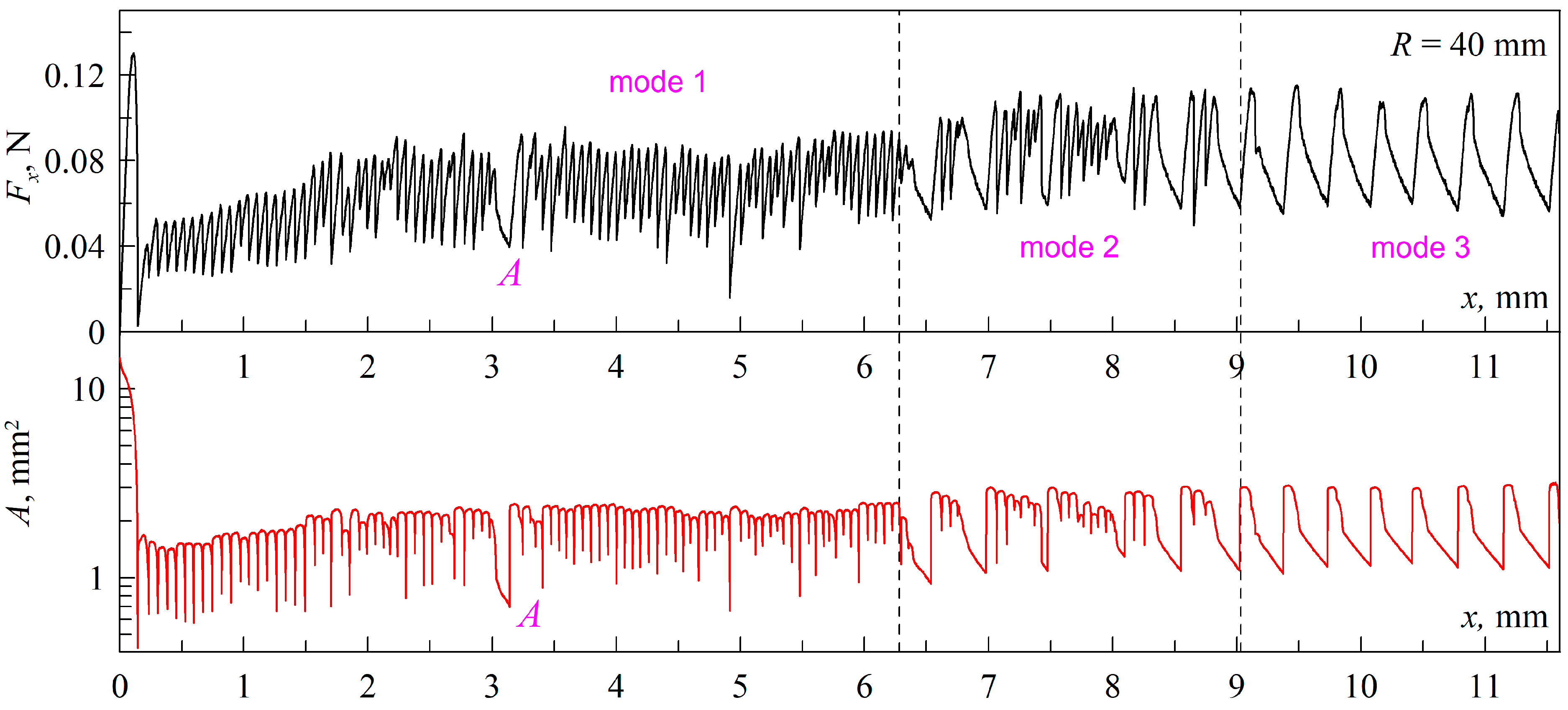
Figure 5 shows the transition between “mode 1” and “mode 3” discussed in this paper. However, in the experiments, we also found a transient regime between these two stationary friction regimes. We labeled this mode as “mode 2” and observed it in the experiment with an indenter of a larger radius
R = 40 mm.
Figure 8 shows the successive transitions between all three modes. Here, the transient mode “mode 2” is something between “mode 1” and “mode 3”, because in “mode 2” the system continuously transitions between the stick–slip (“mode 1”) and “mode 3”, in which there is no sudden reduction in tangential force due to global slippage of the rubber over the indenter surface. Note that here in “mode 1”, the transition to “mode 3” also takes place once in the dependency region, the vicinity of which is shown by point
A. However, in general, “mode 1” remains stable up to the first vertical line, where it is replaced by “mode 2”, which in turn changes to the stable “mode 3” after the second vertical line.
The main difference observed between “mode 1” and “mode 3” is that in “mode 1” there are areas of abrupt reduction of friction force, while in “mode 3” there are no such areas. Therefore, the frequency of transitions between minimum and maximum values of tangential force in “mode 1” is much higher than the frequency of corresponding transitions in “mode 3”. It follows that the value of the transition frequency can be used as a parameter that will determine in which mode the system is currently operating.
One particular observation worth noting is depicted in
Figure 8. Here, we observe a tendency for an increase in friction force and contact area with the displacement of the indenter. This occurs because the elastomer surface in a real experiment is always inclined at a slight angle to the path of the indenter, as it is not possible to perfectly orient them in parallel. In this scenario, with the indenter shift, the indentation depth
d increases due to this inclination. In
Figure 8, the effect of the inclination becomes visually noticeable because the distance traveled by the indenter in this experiment is much greater than in the experiments described above (see, for example,
Figure 2).
Above,
Figure 3b shows the dependencies of the normal force
FN on the indentation depth
d in the phase of pulling the indenter out of the elastomer volume, where the lower curve corresponds to the experiment, the data of which are shown in
Figure 8. A second experiment was performed immediately after this experiment, and the upper curve in
Figure 3b shows the normal force dependence in this experiment. From the comparison of the dependencies shown in
Figure 3b, it follows that the adhesion force in the second experiment was significantly lower. Dependencies of friction force
Fx and contact area
A for the second experiment with indenter with a radius
R = 40 mm are shown in
Figure 9, from which it follows that here the stable “mode 3” was realized. This fact confirms the conclusions made above in the discussion of
Figure 3a that the transition between “mode 1” and “mode 3” is caused by contamination of the indenter surface and a decrease in the specific work of adhesion.
For completeness of representation of the effect considered in this paper, we conducted an additional experiment with an indenter of an even larger radius
R = 50 mm, the results of which confirm the conclusions above but do not introduce anything new; therefore, the data of this experiment are not included in the main text of the paper and are placed in the
supplementary material (Figures S1–S3), which also contains videos of the experiment (
Videos S6 and S7).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








