1. Introduction
Railway systems are the arteries of the national economy, and their status and role in economic and social development are crucial [
1]. The axlebox bearings of high-speed trains shoulder the tasks of load bearing, transmitting forces in all directions and reducing the running resistance, and they play an important role in the running quality, running safety, and dynamic performance of high-speed trains [
2]. Research about bearing faults in the railway industry has been a subject of great interest and scholarly pursuit for over a century, spanning a wide range of studies and inquiries. In the year 1900, one Robert Job, an esteemed member of the Philadelphia & Reading Railway Company, embarked on an ambitious quest to investigate the underlying causes of a phenomenon known as hot axleboxes in steam locomotives, as well as to devise effective preventive measures to combat this issue [
3]. The significance of hot axleboxes started to gain prominence and capture the attention of researchers and professionals as the speed and weight of trains steadily increased over time. In his comprehensive report, Job conclusively asserted that the primary causes of hot axleboxes were predominantly attributed to the incorrect proportion of the metals present in the bearings’ material composition, as well as the detrimental effects of material crystallization brought about by excessively high temperatures, in addition to the pernicious influence of oxidation and the existence of copious amounts of gas within the metal structure itself. Thus, Job’s groundbreaking investigation laid the foundation for subsequent studies in this field. Furthermore, the field of bearing life prediction also witnessed a surge in interest during the early years of the 20th century, with notable contributions made by Palmgren, a distinguished figure associated with SKF, who formulated a pioneering theory for accurately predicting the lifespan of bearings. This innovation proved to be a milestone in the understanding and application of bearing-life prediction techniques [
4,
5]. Additionally, a noteworthy research report published by the esteemed Glen Research Centre at NASA delves into the comprehensive evolution, conceptual framework, and practical implementation of rolling-element bearing-life prediction throughout the entirety of the 20th century [
6]. This seminal publication sheds light on the remarkable progress made in this field over the years and serves as a valuable resource for scholars and practitioners alike. It becomes evident that axle bearings in railways play an indispensable role in ensuring the smooth and efficient operation of trains. Consequently, the selection of a suitable bearing for each specific application is of paramount importance to guarantee fault-free performance. However, it is worth noting that the operating circumstances of these bearings may deviate from the calculated specifications due to a variety of factors. These factors can include the natural wear and tear that occurs over time, as well as changes in the overall dynamics of the vehicle, which can have a significant impact on the service life of the bearings. Thus, it becomes evident that a thorough understanding of these complex dynamics is essential in effectively managing and maintaining the longevity and reliability of railway axle bearings.
In recent years, with the continuous development of high-speed train technology, research about axlebox bearings has also made great progress.
In terms of the dynamic mechanism, the nature of the dynamic behavior of an axlebox bearing is revealed through the study of its vibration, noise, and tribological characteristics. The fault patterns commonly seen in the axlebox bearings of high-speed trains undergo analyses through numerical simulation methods like the finite element analysis and multi-body dynamics analysis. In recent years, many domestic researchers have analyzed and modelled the proposed dynamics/dynamics of bearings [
7]. Stribeck [
8] analyzed the statics of ball bearings based on the Hertz contact theory and deduced the relationship between the maximum load of the ball and the radial load of the bearings. Walters [
9] proposed the complete dynamics model of rolling bearings. Tadina et al. [
10] combined the Lagrange equation of motion with the finite element method (FEM) to study the vibration of rolling ball bearings during the startup period due to the defects on the raceway surface and the local deformation of the outer ring. Wang et al. [
11] studied the contact characteristics inside axlebox bearings under the excitation of the side wind and found that the side wind will cause the bias loading of axlebox bearings; additionally, with the rise of the wind speed, the contact stress inside the bearings will increase significantly. Cha et al. [
12] established a six-degree-of-freedom roller and cage axlebox bearing model and studied and analyzed the vibration and load characteristics of the bearings under the track excitation. Liao et al. [
13] examined the dynamic characteristics of axlebox bearings affected by wheel-polygonal wear. Their research highlighted increased axlebox vibrations associated with higher-order wheel polygons, coupled with a proportional rise in the contact load between the roller and raceway concerning the amplitude of the wheel polygonal wear. Existing studies have mostly focused on the dynamic performance of axlebox bearings under different excitations when the vehicle is running in a straight line, as well as the wheel–rail action when the curve passes [
14]. These numerical simulation and analytical methods can provide us with a deeper understanding of the dynamic behavior of axlebox bearings under different operating conditions and provide theoretical support for fault diagnosis and reliability studies. However, the current numerical simulation methods still have problems, such as model simplification and unreasonable boundary conditions, which need to be further improved.
In terms of fault diagnosis, researchers have studied some non-smooth and non-linear vibration signals, such as rolling bearing faults, and the commonly used methods include the empirical modal decomposition (EMD) method [
15], wavelet transform method [
16], etc. The EMD method has adaptive decomposition characteristics and a good performance in processing non-smooth and non-linear signals, and it has been widely used in bearing-fault diagnoses [
17], but the modal mixing problem exists in the processing of some signals. However, the EMD method suffers from defects such as modal aliasing and large endpoint effects when dealing with certain signals [
18]. The wavelet transform method is a frequently employed method for analyzing non-stationary signals and has found widespread use in bearing-fault diagnoses [
19]. However, the selection of the wavelet basis often relies on manual expertise, limiting the effectiveness of non-stationary signal decomposition, especially in challenging working conditions. Recently, various fault diagnosis techniques integrating signal processing and machine learning have emerged as alternatives. Wan et al. [
20] showed that Variational Mode Decomposition (VMD) can effectively extract the rolling bearing compound faults under the interference of strong noise sources, and the effect is better than other modal decomposition methods. Dong et al. [
21] proposed a parameter adaptive VMD axlebox bearing fault diagnosis method. The results show that their research method can more effectively reduce the influence of noise and extract the fault characteristics in the vibration signals of axlebox bearings under complex coupled conditions. This method has a broad application prospect in the fault diagnosis of axlebox bearings of high-speed trains.
In terms of reliability research, researchers have improved the reliability and service life of bearings in rolling stock by studying the life prediction, fatigue strength, and wear resistance of bearings. For example, Zhang et al. [
22,
23] proposed a composite fault detection method for wheel-bearing systems based on the wavelet transform method. Extensive studies have been carried out by researchers in considering the effects of temperature, axial load, curve geometry parameters, and braking conditions on the dynamic characteristics of axlebox bearings. These factors have an important impact on the contact characteristics, tribological properties, and dynamic behavior of axlebox bearings, which in turn affects the operational safety and stability of the train. Palmgren et al. [
24], based on a large number of experimental studies and analyses, proposed a formula for calculating frictional power consumption, which is simple and reliable, and can be used to calculate the frictional power consumption of the bearing as a whole. Harris [
25] proposed a method to locally calculate the frictional power consumption of bearings based on the bearing dynamics theory and according to the force relationship between the bearing components. Pouly et al. [
26] investigated the high-speed bearing power loss by using the thermal network method, finding that rolling friction and drag loss are the two most important sources of loss compared with other power losses. Wang et al. [
27] used the finite element method to establish a temperature field simulation model of cylindrical roller bearings and analyze the influence law of different lubricants on bearing temperature. Zhou et al. [
28] established a bearing temperature experimental bench using the fiber Bragg grating method and analyzed the influence of rotational speed and radial load on the temperature rise of the inner and outer rings of the bearings as well as the influence law. Wang et al. [
29] established a vehicle containing bearings by using the SIMPACK dynamics model and studied the thermal characteristics of bearings under vehicle vibration caused by track unevenness conditions and the influence of key factors on the operating temperature of bearings. Gao et al. [
30] established a transient heat transfer model for intermediate bearings and investigated the effects of ambient temperature, lubricant kinematic viscosity, and rotational speed on the frictional heat and temperature of the bearings. Mitrovic et al. [
31] established a two-dimensional model of a ball bearing and analyzed the effects of temperature on the thermal expansion and stiffness. Xu et al. [
32] established a two-dimensional thermal coupling model of bearings based on ANSYS and investigated the characteristics of the influence of rotational speed, lubricant temperature, and flow rate on the displacement of the inner and outer rings and raceway stress.
Some studies have been conducted in recent years to analyze the dynamics [
33,
34], fault diagnosis [
35,
36,
37,
38], and condition monitoring [
39,
40] of the double-row tapered roller bearings (TRBs). However, these studies have not considered complex working environments. The pioneers in the field of TRB research have developed the theoretical basis for the rolling-element bearing. Building upon this theoretical foundation, Yang et al. [
41] have proposed a mathematical model that considers the angular misalignment of double-row TRBs and combined external loads to study their contact state and fatigue life. Andreason [
42] has developed a TRB model that investigates the load distribution between the roller and the raceways by considering both radial and axial loads. However, this model neglects the centrifugal and gyroscopic moments. In the case of double-row TRBs, Becrea et al. [
43,
44] have investigated fatigue life and heat dissipation using an analytical model that considers bearing clearance, centrifugal forces, and pre-compression. In a study conducted by Kabus et al. [
45], contact pressure distributions of TRBs have been investigated using a multi-degree of freedom model. Other works have also examined the effects of angular misalignment and geometric error on TRBs [
46,
47] and have evaluated the contact forces, contact stress, and stiffness characteristics of the roller–raceway interface. While prior studies primarily concentrate on single-row TRBs, they have not addressed the performance of axlebox bearings within high-speed trains under the random or measured excitations of track irregularities. Despite these gaps, the current study remains insufficient in thoroughly exploring the interaction among various factors and their comprehensive influence on the dynamic characteristics of axlebox bearings. Consequently, while the research and development of axlebox bearings for high-speed trains have yielded noteworthy results, numerous deficiencies and issues still necessitate further exploration. Future research ought to focus on a comprehensive examination of the dynamic mechanisms of axlebox bearings, innovative fault diagnosis technologies, assessments, and enhancements of reliability. Additionally, it should investigate the impact of multi-factor coupling on the dynamic characteristics of axlebox bearings. Such studies are imperative to furnish a more robust assurance for the safe and stable operation of high-speed trains.
The current state of the field demonstrates an extensive past in the study of vibration analysis for the purpose of identifying faults/defects in bearings. Notably, this area of research was spearheaded by Houser and Drosjack [
48], who focus on the exploration of rotational frequencies, fault modes, and a range of analysis techniques. Nevertheless, it is important to recognize the influence of factors such as speed, mass, and alignment on vibration levels, as this underscores the need for a meticulous and accurate characterization of vibration patterns [
49].
Gupta addressed the issue of vibration monitoring in cylindrical roller bearings and utilized classical differential equations of motion to solve the vibration response problem, analyzing the interactions between rollers and raceways as well as between rollers and the cage [
50,
51]. Lu et al. [
52] conducted a unique investigation by developing a bearing vehicle coupled model. The developed model aimed to examine the impacts of different types of bearing defects on the vibration responses of the bearing. In another contribution to the field, McFadden and Smith [
53,
54] established a bearing model under a constant radial load focusing on describing single and multi-point defects on the inner raceway as impulse functions. Khanam et al. presented a multi-event excitation force model that enabled the analysis of vibration responses in bearings with inner raceway defects [
55]. This model expressed the forcing function as a function of various factors, such as speed, load, defect edge, and size of the defect. While the vibration monitoring model predicts the frequency of the spectrum component in bearing responses with defects, it does not provide a clear understanding of the underlying cause of the vibration at a bearing defect location. Therefore, further research is needed to comprehensively reveal the mechanisms behind the vibration in such cases.
This paper introduces an innovative method that integrates signal processing techniques to enhance fault detection in high-speed train axlebox bearings, particularly in identifying inner and outer ring raceway defects. The proposed approach aims to improve diagnostic precision and efficiency, providing a notable advancement in fault characterization within the context of high-speed train operations. The purpose of this paper is to present an initial investigation into the utilization of an envelope analysis for the implementation of defect detection in the inner ring and outer ring raceways of bearings, specifically for high-speed trains. Within this section, a literature review of the techniques used for identifying faults or defects of bearings is provided. The remaining content of the paper is structured as follows: Firstly, the development of the interconnected vehicle–track system, encompassing both the track system and the traction–gear transmission system, is introduced. Furthermore, there is a brief description of the defects in the inner ring and outer ring raceways of bearings, as well as track irregularities. In
Section 3, the conventional time domain and frequency domain, along with an envelope analysis, are applied to detect defects in the inner ring and outer ring raceways of bearings in the developed vehicle. The conclusions are presented in
Section 4.
In this paper, a detailed breakdown of the research methodology employed throughout this study is shown as follows. The following text offers a step-by-step textual elucidation, presenting a comprehensive overview of the various stages and methodologies that are instrumental in conducting this research.
Development of an Integrated Model: A highly advanced model was created that integrates vehicle and track dynamics. This comprehensive model accounts for both traction–gear transmission and track systems, ensuring accuracy.
Focus on Inner/Outer Ring Raceway Defect Detection: The study primarily centers on detecting inner/outer ring raceway defects in high-speed trains. An initial analysis using conventional signal processing techniques, like time and frequency domain, was challenging in regard to precise defect characterization.
Introduction of Envelope Analysis: To address limitations, an envelope analysis was proposed for detecting axlebox vibration signals caused by ring raceway defects. This method displayed high efficiency and reliability in detecting and identifying these defects.
FFT Application for Identifying Frequencies: The application of the Fast Fourier Transform (FFT) method to the enveloped signal facilitated the clear identification of characteristic frequencies and their harmonics.
Limitations and Further Refinement: Despite the effectiveness, there are limitations in handling signal complexities and differentiating raceway defects from other bearing faults. Future research aims at refining these methods for better adaptability and accuracy across various fault scenarios.
Future Research Directions: The focus shifts to refining detection methods for inner/outer ring raceway defects using advanced signal processing techniques like the envelope analysis and FFT method. This includes improving fault detection precision, assessing the effectiveness of experimental measurements, and expanding fault detection capabilities to encompass various other bearing faults in high-speed trains.
2. Vehicle–Track Coupled Dynamics Model
Figure 1 and
Figure 2 serve as illustrative representations of the intricately interconnected three-dimensional model, highlighting the synergy within the vehicle–track system. This study aims to present an advanced dynamic model that builds upon the conventional vehicle–track coupled dynamics model, placing particular emphasis on the complexities of the traction–gear system, a pivotal aspect in the evolution of integrated vehicle–track systems. The coupled vehicle–track dynamic model is conceptually divided into three fundamental components: the vehicle dynamic system, the track system, and an augmented traction–gear transmission system. The vehicle system includes critical elements such as the carbody, bogies, wheelsets, gearboxes, and traction motors. The construction of this system leverages advanced multibody system software. Noteworthy features include the support of the carbody on each side of the bogie frame by two secondary suspensions, while the wheelsets are linked to the bogie frame through primary suspensions. Significantly, the traction–gear transmission system model undergoes an exhaustive examination, with detailed considerations of the traction motor, gearbox housing, gearwheel, pinion, and four-type bearings, along with a helical gear pair. These elements are seamlessly integrated into the overall model, contributing to a holistic understanding of the dynamics inherent in the comprehensive vehicle–track system.
To identify defects in the inner and outer raceways of axlebox bearings, a comprehensive vehicle dynamic model was developed, aligning with the structural nuances and operational intricacies of high-speed trains. This comprehensive vehicle model encompasses crucial components such as the carbody, bogie frames, wheelsets, and axleboxes. Furthermore, within the motor car model, detailed considerations are given to the traction transmission systems responsible for propelling the vehicle forward. Within our current dynamics model, complex elements such as kinematic constraints and suspension systems, including the bump stop, spring stiffness, time-varying mesh stiffness, and gear pair friction, are incorporated using nonlinear components. The simulation of contact forces at the wheel–rail interface employs the FASTSIM algorithm within the SIMPACK environment [
55].
Figure 1 illustrates the three-dimensional vehicle–track model based on the classical vehicle–track model.
To attain a more comprehensive understanding of the coupled vehicle–track system, an intricate model has been meticulously crafted involving 23 rigid bodies. This sophisticated system establishes a total of 102 degrees of freedom (DOF), meticulously considering components like the pinion, gearwheel, gearbox housing, and traction motor. Within the domain of traction–gear transmission systems, crucial components are modelled as rigid bodies, each endowed with six degrees of freedom (six DOFs). These freedoms encapsulate longitudinal (
X), lateral (
Y), vertical (
Z), roll (
), pitch (
) and yaw (
) motions [
56]. The intricacies of the vehicle components and their mathematical expressions are intricately outlined in
Figure 1 and key components are listed in
Table 1, providing a detailed and insightful exploration into the dynamics of the coupled vehicle–track system.
2.1. Track Model
The present research investigates a typical slab track system that is composed of various elements including rails, rail pads, slabs, and subgrades. These components are visually depicted in
Figure 1 and
Figure 2, providing a clear representation of the system under examination. To comprehensively analyze the behavior of the rails within this system, a more intricate rail model is established, drawing upon the fundamental principles of the Euler–Bernoulli beams. This model considers three distinct types of motion, vertical, lateral, and torsional, allowing for a comprehensive exploration of rail irregularities. To provide adequate support for the rails, three-dimensional slabs are implemented and modelled as regular elastic rectangular plates resting on a viscoelastic foundation. It is worth noting that due to the remarkably high lateral bending stiffness of the slabs, their lateral vibration is assumed to be rigid. Furthermore, the modal superposition method is employed for the purpose of calculating the slab–track model, ensuring accurate and precise results. Finally, it is important to mention that there exists a valuable body of literature on this topic, as evidenced by reference [
57]. However, the scope of this paper does not permit an in-depth discussion of the literature.
2.2. Traction–Gear Transmission System
In
Figure 2, a nuanced model delving into the traction dynamics of a typical high-speed train unfolds. The intricate nature of traction drives can be explicated as follows: Primarily, the traction model serves as the conduit for transmitting the motor rotor’s traction torque to the wheel pair, propelling the vehicle forward. The interconnection between the traction motor and the bogie frame is facilitated by spring damper elements. Throughout the transmission process, the power originating from the traction motor and reaching the pinion is conveyed through a flexible coupling, meticulously represented as a torsion-spring-damping element. The structural attributes and operational mechanisms of the traction drive system are meticulously encapsulated in models that resonate with vibration-based systems. Subsequently, the power undergoes transmission through the torsional vibrations inherent in the gear transmission.
Within the gear dynamic model, pivotal components take center stage, including a gear bearing system and a gearbox housing.
Figure 2 presents an intricate view of the gear–bearing model specific to high-speed trains, encompassing helical gear pairs and five bearings (bearing No. 1–5). Both the pinion and gearwheel are ingrained in the model as rigid disks, endowed with a central moment of inertia. To mirror a more realistic performance, translational and rotational degrees of freedom are applied to the disks. The wheelset axle is directly affixed through the gearwheel, and the gearbox finds its mount through two tapered roller bearings (No. 1 and 2). Notably, the inner ring of bearings No. 1 and 2 is affixed to the axle, while the outer ring is anchored to the gearbox housing. The pinion is intricately connected to the gearbox housing through three distinct bearings, as the cylindrical roller bearing (No. 4) is located to the left of pinion bearing No. 3 and 4, while the four-point contact bearing (No. 5) is positioned to the right of pinion bearing No. 3–5. Moreover, the outer ring of pinion bearing No. 3–5 establishes a connection with both the pinion shaft and the gearbox housing.
2.3. Bearing Inner and Outer Ring Raceways Defect and Track Irregularity
The study of high-speed train axlebox bearing inner and outer ring raceway defects holds paramount importance in railway engineering. These defects, stemming from factors such as manufacturing imperfections, wear during operation, or material fatigue, can significantly impact the safety, reliability, and efficiency of railway systems. This research focuses on simulated defects at different levels—ranging from a healthy state to defects measuring 0.4 mm, 0.6 mm, and 1 mm in depth—while considering a train operating at a speed of 300 km/h. The investigation revolves around comprehending the implications of these defects on the performance of axlebox bearings within high-speed trains. The consequences are multifaceted. Firstly, defects lead to increased friction and wear, accelerating the bearing’s degradation. This heightened wear and tear can compromise the efficiency of the bearing and contribute to energy losses. Secondly, defects induce vibrations and generate noise during train operation, potentially causing discomfort for passengers and further damage to surrounding components. Moreover, the structural integrity of the bearing can be compromised, posing safety risks to passengers and the operational reliability of the train. Severe defects have the potential to impact not only the bearing but also adjacent components, making the study crucial for ensuring the overall safety and reliability of high-speed train operations.
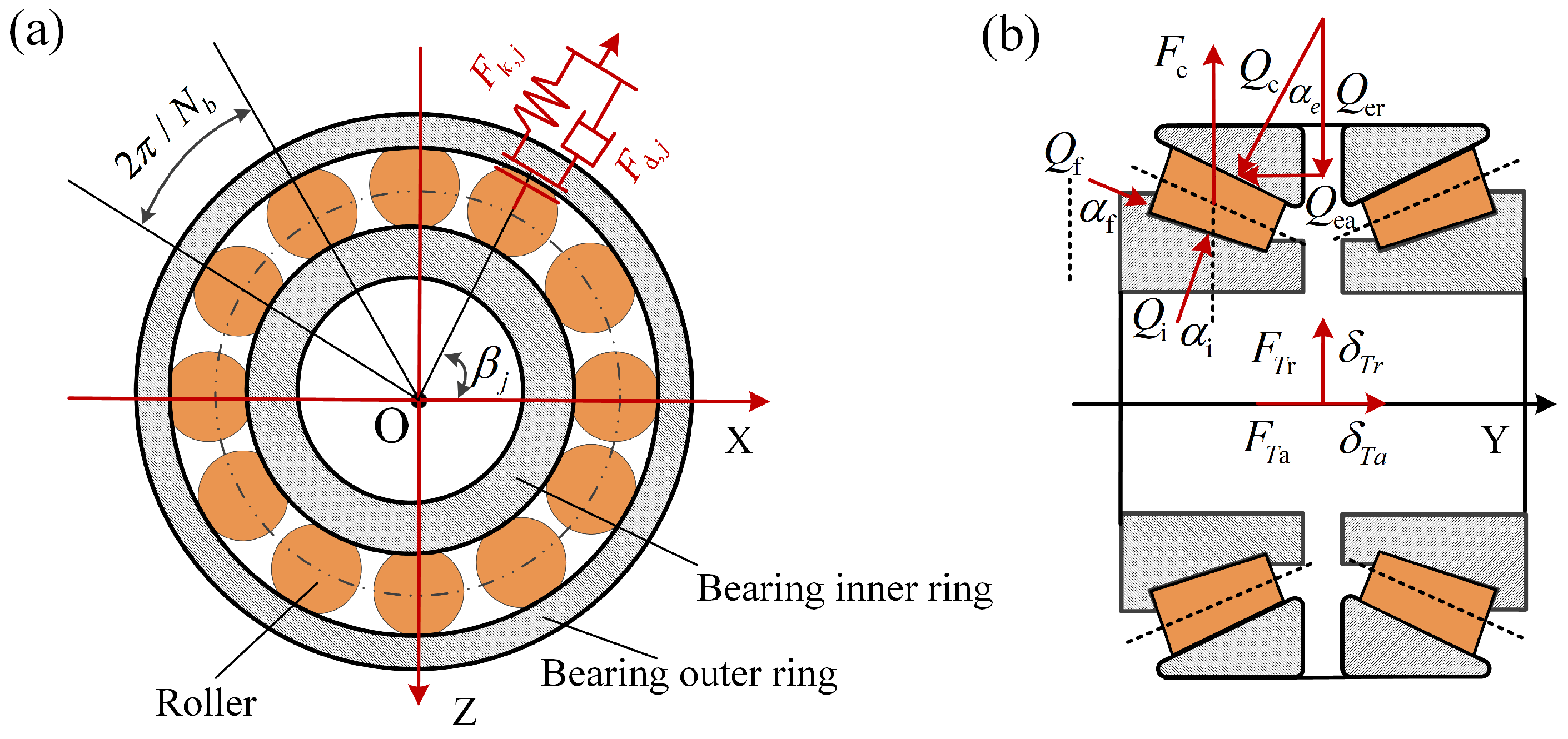
Figure 3 illustrates the axlebox bearing model, where the intricate dynamic interplay between the roller and the raceways is meticulously conceptualized, drawing inspiration from the Hertzian contact theory. In this representation, the rollers and inner raceways amalgamate into a cohesive whole-body entity. The dynamic forces
governing the interaction between the rollers and the outer raceway find quantification through the following expression [
58]:
where
m is the row number,
represents the effective contact length of the rollers, and
is the compression,
m and
j represent the index for each row of rollers and the index for each individual rolling element within a row.
The force
between the roller and the inner raceway:
where
,
, and
are the contact angles of the roller–inner raceway, roller–outer raceway, and roller–guiding flange, respectively (
Figure 3);
is the pitch diameter of the tapper roller bearing; and
is the orbital angular speed of the rollers obtained by
where
is the angular speed of the wheelset and
is the mean diameter of the rollers.
The compression of the roller at the azimuthal location
can be calculated by
where
and
are the relative radial and axial displacements between the inner and outer raceways, respectively, which are obtained by
where
and
are the longitudinal displacements of axlebox and wheelset, respectively;
and
are the roll and yaw motions of the wheelset, respectively;
and
are the lateral displacements of the axlebox and wheelset, respectively.
The resultant forces of each axlebox bearing in the radial (
) and axial (
) directions can be calculated as follows:
where
is the bearing damping.
2.4. Track Irregularity
As mentioned, the track geometry irregularity has a significant impact on axlebox vibration responses on a typical high-speed train. Concerning the irregularities, it is worth mentioning that, in the numerical simulation, there are two distinct types of rail irregularities that have been adopted. The first type consists of the realistic irregularities that have been obtained from the measured high-speed line. On the other hand, the second type is derived from the six different levels of the empirical spectrum of rail irregularities, as documented in reference [
58]. It is important that the track irregularity serves as a critical source of track-induced vibration for a railway vehicle. It is not sufficient to simply use a predefined track with a sinusoidal irregularity and a given frequency to investigate the performance of a suspension system or a damper system. Therefore, within the context of this study, a more realistic track model is utilized that closely resembles the level of the measured track irregularities. The method utilized to represent track irregularities in this study is grounded in the power spectrum density (PSD) method developed by the Federal Railway Administration (FRA) of America. This method is grounded on a significant amount of measurement data. With respect to the track irregularity, the power spectrum density (PSD) has been analyzed using even rational functions that include cut-off frequencies and irregularity constants. The wavelengths of these irregularities range from 1.524 to 304.8 m. In general, it should be noted that, apart from the rail irregularities, the wheel–rail interaction differs on each track due to the various combinations of the curve radius, cant deficiency, and transition length. It is important to emphasize that the track design between the high and low rails, specifically the left and right curves, is assumed to be identical throughout the entire simulation process.
In the following simulation, the measured vertical and lateral rail-related irregularities are applied on the left and right rails in this study, as shown in
Figure 4.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}