
Automatic Crop Pest Detection Oriented Multiscale Feature Fusion Approach

 ,
,  ,
,
Abstract
:Simple Summary
Abstract
1. Introduction
2. Related Works
2.1. CNN-Based Crop Pest Detection Method
2.2. Feature Pyramid Network
2.3. Region Proposal Network
3. Materials
3.1. Light Trapping Device for Pest Monitoring
3.2. Multi-Category Pest Dataset 2021 (MPD2021)
4. Proposed Method
4.1. MCPD-Net Construction
4.2. Multiscale Feature Pyramid Network (MFPN)
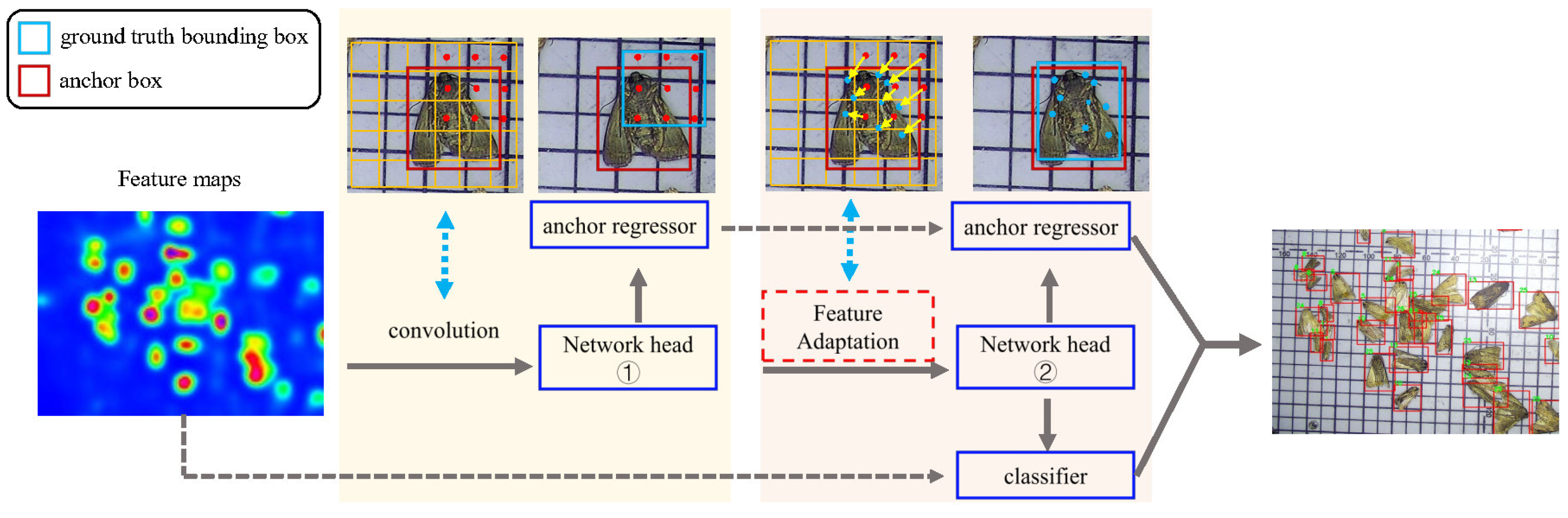
4.3. Adaptive Feature Region Proposal Network (AFRPN)
5. Results
5.1. Evaluation Metrics and Parameter Settings
5.2. Quantitative Analysis
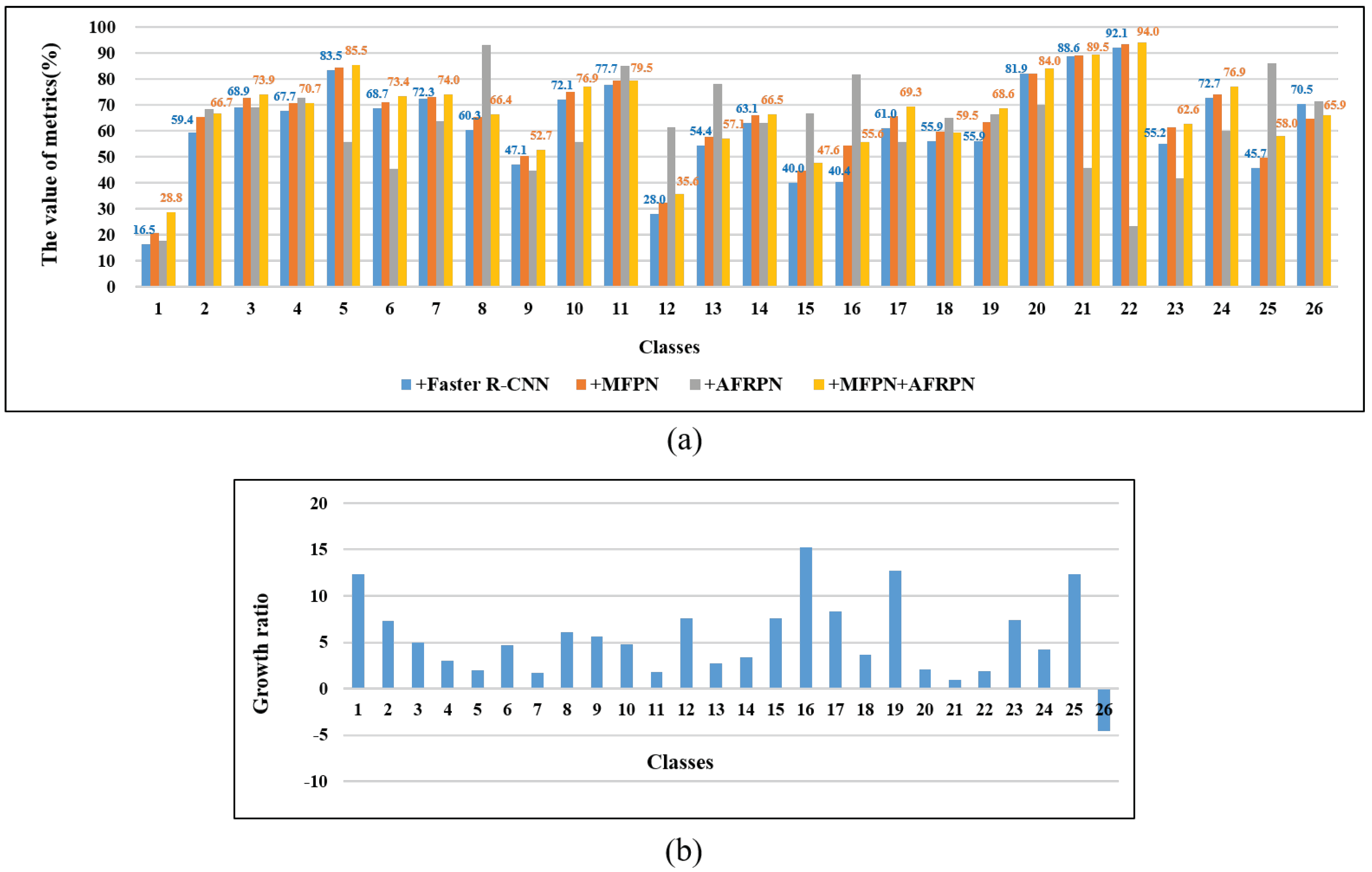
Ablation Experiments
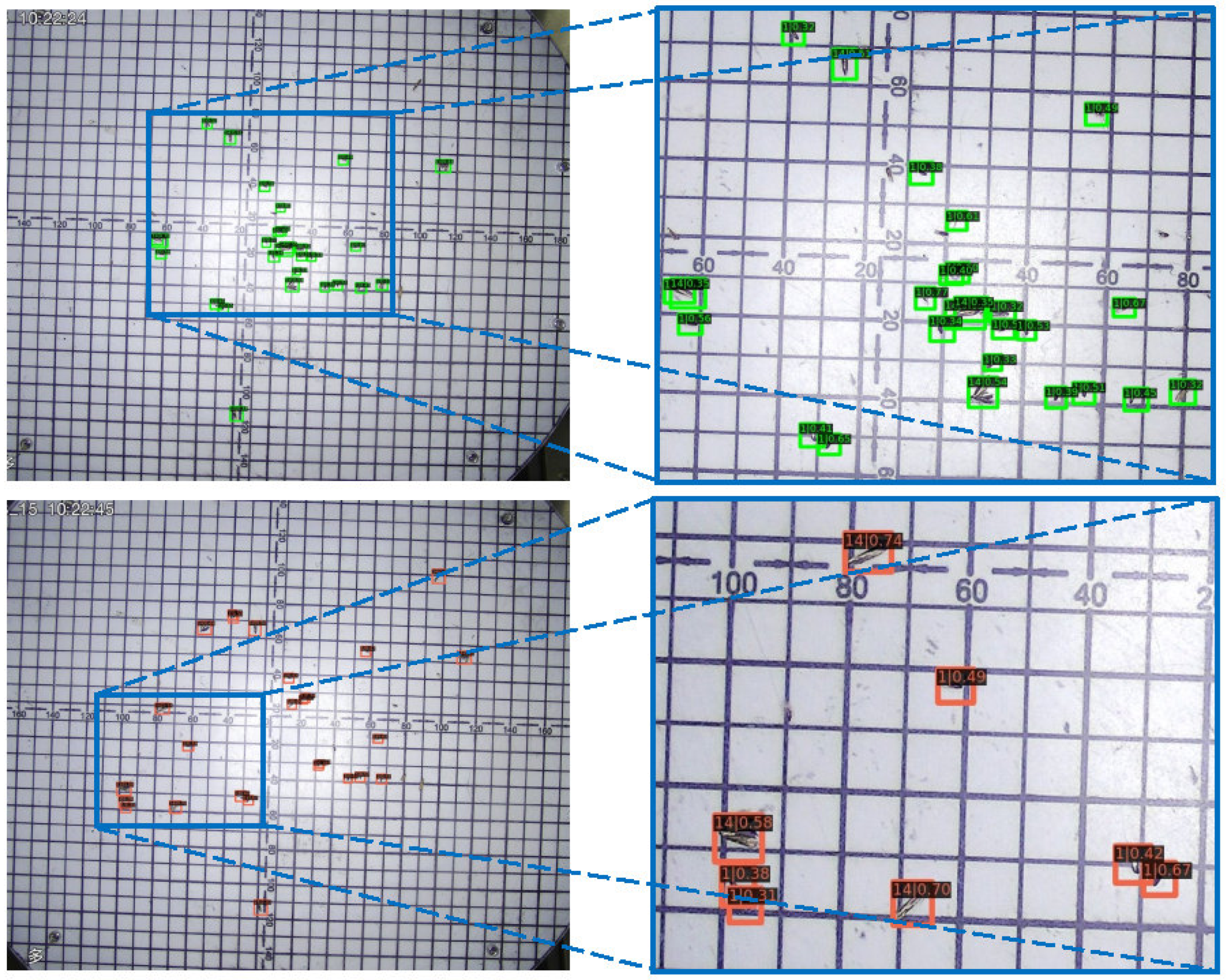
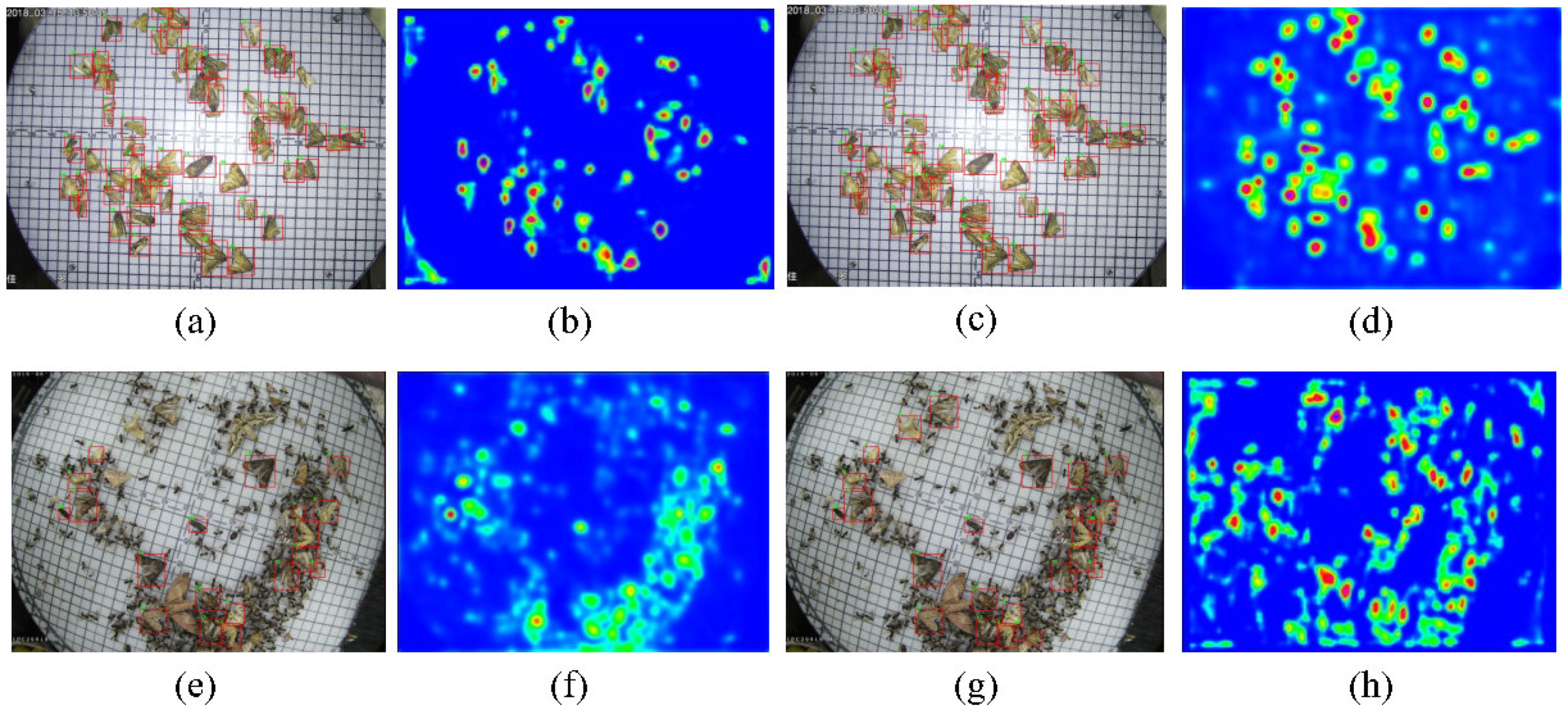
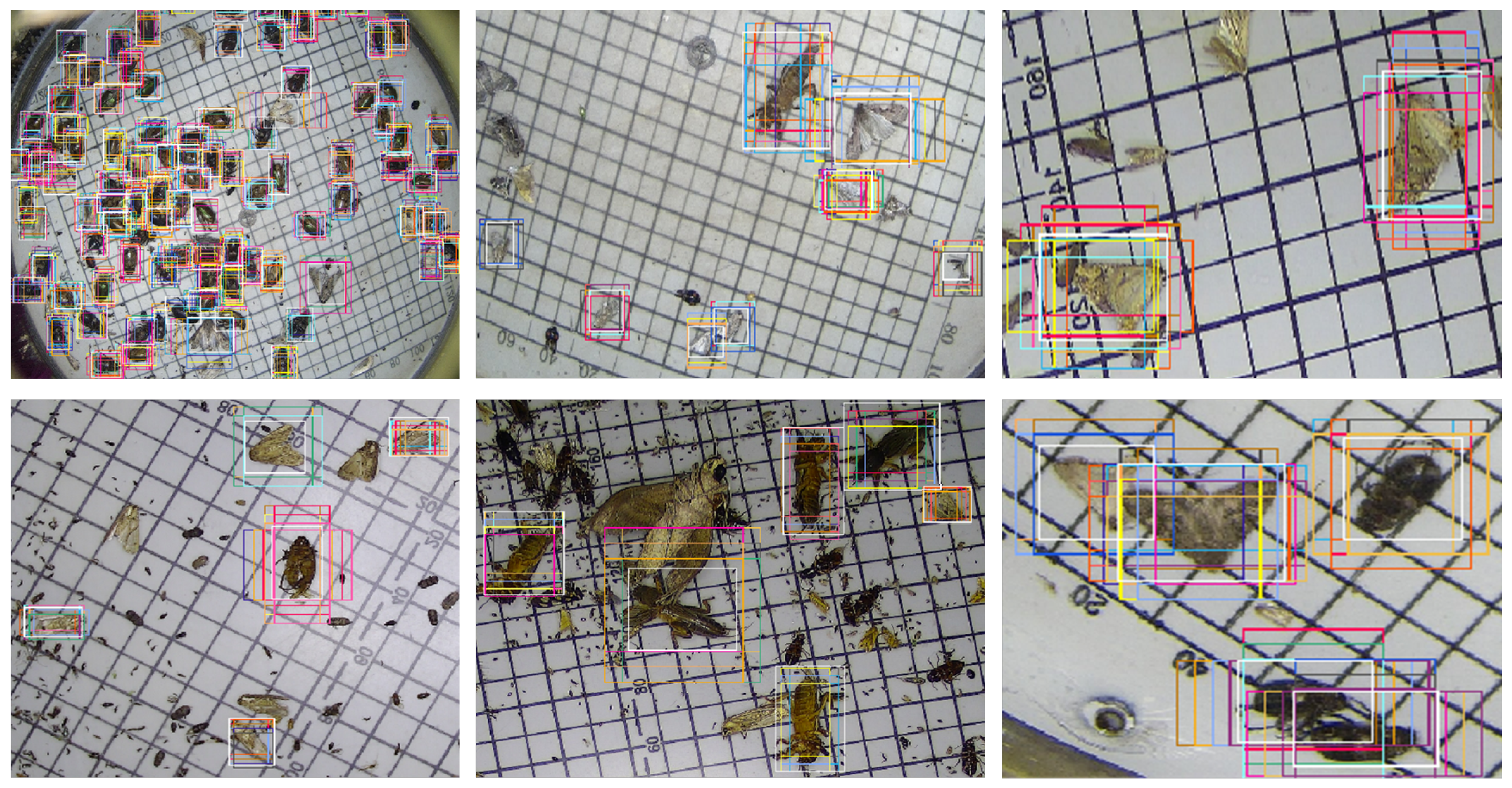
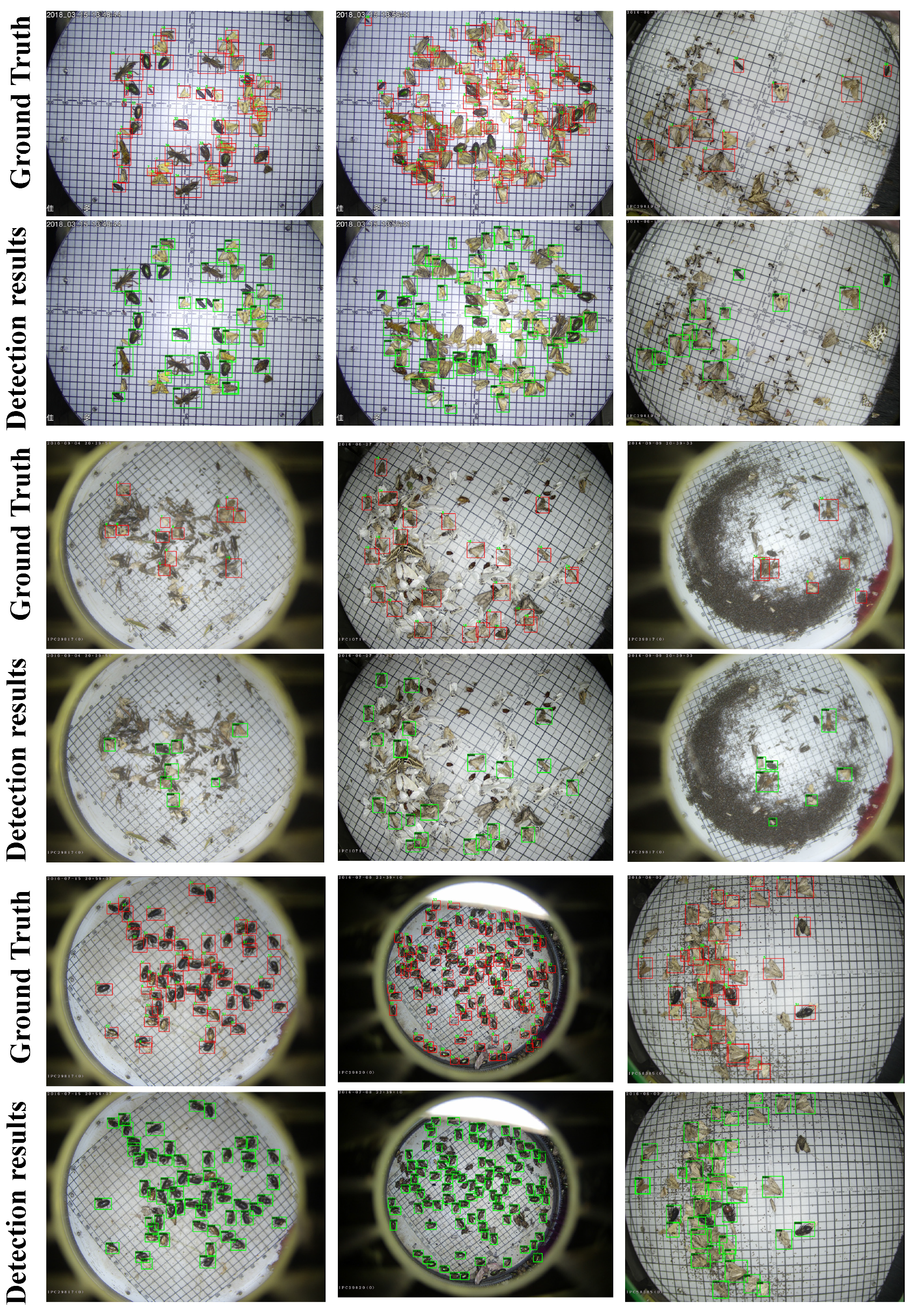
5.3. Visualization Analyses
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiao, L.; Chen, M.; Wang, X.; Du, X.; Dong, D. Monitoring the number and size of pests based on modulated infrared beam sensing technology. Precis. Agric. 2018, 19, 1100–1112. [Google Scholar] [CrossRef]
- Willers, J.L.; Jenkins, J.N.; Ladner, W.L.; Gerard, P.D.; Boykin, D.L.; Hood, K.B.; McKibben, P.L.; Samson, S.A.; Bethel, M.M. Site-specific Approaches to Cotton Insect Control. Sampling and Remote Sensing Analysis Techniques. Precis. Agric. 2005, 6, 431–452. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. Detecting and Classifying Pests in Crops Using Proximal Images and Machine Learning: A Review. AI 2020, 1, 312–328. [Google Scholar] [CrossRef]
- Gassoumi, H.; Prasad, N.R.; Ellington, J.J. Neural network-based approach for insect classification in cotton ecosystems. In Proceedings of the International Conference on Intelligent Technologies, Bangkok, Thailand, 12–14 December 2000; pp. 13–15. [Google Scholar]
- Boissard, P.; Martin, V.; Moisan, S. A cognitive vision approach to early pest detection in greenhouse crops. Comput. Electron. Agric. 2008, 62, 81–93. [Google Scholar] [CrossRef] [Green Version]
- Ebrahimi, M.; Khoshtaghaza, M.H.; Minaei, S.; Jamshidi, B. Vision-based pest detection based on SVM classification method. Comput. Electron. Agric. 2017, 137, 52–58. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 9627–9636. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Li, R.; Wang, R.; Xie, C.; Liu, L.; Zhang, J.; Wang, F.; Liu, W. A coarse-to-fine network for aphid recognition and detection in the field. Biosyst. Eng. 2019, 187, 39–52. [Google Scholar] [CrossRef]
- Deng, L.; Wang, Y.; Han, Z.; Yu, R. Research on insect pest image detection and recognition based on bio-inspired methods. Biosyst. Eng. 2018, 169, 139–148. [Google Scholar] [CrossRef]
- Liu, L.; Wang, R.; Xie, C.; Yang, P.; Wang, F.; Sudirman, S.; Liu, W. PestNet: An end-to-end deep learning approach for large-scale multi-class pest detection and classification. IEEE Access 2019, 7, 45301–45312. [Google Scholar] [CrossRef]
- Rustia, D.J.A.; Lu, C.Y.; Chao, J.J.; Wu, Y.F.; Chung, J.Y.; Hsu, J.C.; Lin, T.T. Online semi-supervised learning applied to an automated insect pest monitoring system. Biosyst. Eng. 2021, 208, 28–44. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Dang, L.M.; Sadeghi-Niaraki, A.; Moon, H. Crop pest recognition in natural scenes using convolutional neural networks. Comput. Electron. Agric. 2020, 169, 105174. [Google Scholar] [CrossRef]
- Wang, R.; Jiao, L.; Xie, C.; Chen, P.; Du, J.; Li, R. S-RPN: Sampling-balanced region proposal network for small crop pest detection. Comput. Electron. Agric. 2021, 187, 106290. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Liang, Y.; Changjian, W.; Fangzhao, L.; Yuxing, P.; Qin, L.; Yuan, Y.; Zhen, H. TFPN: Twin Feature Pyramid Networks for Object Detection. In Proceedings of the 2019 IEEE 31st International Conference on Tools with Artificial Intelligence (ICTAI), Portland, OR, USA, 4–6 November 2019; pp. 1702–1707. [Google Scholar] [CrossRef]
- Ghiasi, G.; Lin, T.Y.; Le, Q.V. NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 7029–7038. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Fang, H.; Lin, T.Y.; Vedantam, R.; Gupta, S.; Dollár, P.; Zitnick, C.L. Microsoft coco captions: Data collection and evaluation server. arXiv 2015, arXiv:1504.00325. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Pang, J.; Chen, K.; Shi, J.; Feng, H.; Ouyang, W.; Lin, D. Libra R-CNN: Towards Balanced Learning for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019, Long Beach, CA, USA, 16–20 June 2019; pp. 821–830. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, 13–19 June 2020; pp. 10778–10787. [Google Scholar] [CrossRef]
- Liu, S.; Huang, D.; Wang, Y. Learning Spatial Fusion for Single-Shot Object Detection. arXiv 2019, arXiv:1911.09516. [Google Scholar]
- Guo, C.; Fan, B.; Zhang, Q.; Xiang, S.; Pan, C. AugFPN: Improving Multi-Scale Feature Learning for Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020. [Google Scholar] [CrossRef]
- Uijlings, J.R.; Van De Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef] [Green Version]
- Zitnick, C.L.; Dollár, P. Edge Boxes: Locating Object Proposals from Edges. In Proceedings of the Computer Vision—ECCV, Zurich, Switzerland, 6–12 September 2014; pp. 391–405. [Google Scholar]
- Vu, T.; Jang, H.; Pham, T.X.; Yoo, C.D. Cascade RPN: Delving into High-Quality Region Proposal Network with Adaptive Convolution. In Proceedings of the Conference on Neural Information Processing Systems (NeurIPS), Vancouver, BC, Canada, 8–14 December 2019. [Google Scholar]
- Xie, L.; Liu, Y.; Jin, L.; Xie, Z. DeRPN: Taking a Further Step toward More General Object Detection. Proc. AAAI Conf. Artif. Intell. 2019, 33, 9046–9053. [Google Scholar] [CrossRef] [Green Version]
- Karar, M.E.; Alsunaydi, F.; Albusaymi, S.; Alotaibi, S. A new mobile application of agricultural pests recognition using deep learning in cloud computing system. Alex. Eng. J. 2021, 60, 4423–4432. [Google Scholar] [CrossRef]
- Dong, S.; Wang, R.; Liu, K.; Jiao, L.; Li, R.; Du, J.; Teng, Y.; Wang, F. CRA-Net: A channel recalibration feature pyramid network for detecting small pests. Comput. Electron. Agric. 2021, 191, 106518. [Google Scholar] [CrossRef]
- Force, G. Jiaduo PS-15III-1 Solar Frequency Light Traping Device. Website. 2019. Available online: http://www.jiaduo.com/product/87.html/ (accessed on 20 April 2022).
- Wu, X.; Zhan, C.; Lai, Y.K.; Cheng, M.M.; Yang, J. Ip102: A large-scale benchmark dataset for insect pest recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8787–8796. [Google Scholar]
- Hughes, D.; Salathé, M. An open access repository of images on plant health to enable the development of mobile disease diagnostics. arXiv 2015, arXiv:1511.08060. [Google Scholar]
- Neubeck, A.; Van Gool, L. Efficient non-maximum suppression. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; pp. 850–855. [Google Scholar]
- Dai, J.; Qi, H.; Xiong, Y.; Li, Y.; Zhang, G.; Hu, H.; Wei, Y. Deformable convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 764–773. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 22–24 June 2009; pp. 248–255. [Google Scholar]
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Xu, J.; et al. MMDetection: Open mmlab detection toolbox and benchmark. arXiv 2019, arXiv:1906.07155. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-cam: Visual explanations from deep networks via gradient-based localization. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pest ID | Scientific Names | Specimens | Average Width (Pixel) | Average Heigth (Pixel) | Relative Size (%) |
|---|---|---|---|---|---|
| 1 | Nilaparvata lugens | 3045 | 37.8 | 35.4 | 0.0282 |
| 2 | Cnaphalocrocis medinalis | 2901 | 78.2 | 77.6 | 0.1223 |
| 3 | Chilo suppressalis | 1831 | 101.4 | 103.9 | 0.2086 |
| 4 | Mythimna separata | 5094 | 140.9 | 141.5 | 0.4122 |
| 5 | Helicoverpa armigera | 15,392 | 118.7 | 119.2 | 0.2945 |
| 6 | Ostrinia furnacalis | 9053 | 107.8 | 109.1 | 0.2400 |
| 7 | Proxenus lepigone | 24,694 | 83.8 | 85.0 | 0.1457 |
| 8 | Spodoptera litura | 2253 | 151.0 | 149.3 | 0.4523 |
| 9 | Spodoptera exigua | 5942 | 86.5 | 86.1 | 0.1497 |
| 10 | Sesamia inferens | 1740 | 123.0 | 123.1 | 0.3045 |
| 11 | Agrotis ipsilon | 3203 | 166.7 | 168.6 | 0.5768 |
| 12 | Plutella xylostella | 736 | 51.3 | 52.2 | 0.0545 |
| 13 | Mamestra brassicae | 2150 | 145.4 | 144.6 | 0.4300 |
| 14 | Hadula trifolii | 4725 | 130.9 | 130.8 | 0.3488 |
| 15 | Agrotis segetum | 981 | 145.4 | 145.5 | 0.4347 |
| 16 | Agrotis tokionis | 331 | 174.8 | 175.5 | 0.6269 |
| 17 | Agrotis exclamationis | 357 | 162.2 | 159.9 | 0.5192 |
| 18 | Xestia cnigrum | 446 | 140.9 | 139.4 | 0.4023 |
| 19 | Holotrichia oblita | 599 | 126.4 | 126.3 | 0.3195 |
| 20 | Holotrichia parallela | 6896 | 119.3 | 119.7 | 0.2900 |
| 21 | Anomala corpulenta | 23,523 | 109.2 | 109.6 | 0.2462 |
| 22 | Gryllotalpa orientalis | 3919 | 215.6 | 211.8 | 0.8993 |
| 23 | Pleonomus canaliculatus | 306 | 124.4 | 125.2 | 0.3230 |
| 24 | Agriotes subrittatus | 4893 | 80.7 | 82.2 | 0.1308 |
| 25 | Melanotus caudex | 532 | 74.6 | 74.0 | 0.1194 |
| 26 | Spodoptera frugiperda | 241 | 96.4 | 95.6 | 0.1886 |
| Method | Backbone | ||||
|---|---|---|---|---|---|
| SSD(512) | VGG16 | 31.9 | 57.1 | 33.0 | 51.1 |
| FCOS | ResNet-50 | 33.1 | 57.2 | 35.4 | 55.0 |
| PAFPN | ResNet-50 | 35.1 | 61.5 | 37.2 | 49.8 |
| Mask R-CNN | ResNet-50 | 34.7 | 60.9 | 36.4 | 49.9 |
| Ours | ResNet-50 | 38.3 | 67.3 | 40.4 | 55.4 |
| Pest ID | SSD 512 [7] | FCOS [12] | PAFPN [15] | Mask R-CNN [16] | Ours |
|---|---|---|---|---|---|
| 1 | 5.3 | 8.9 | 16.1 | 15.3 | 28.8 |
| 2 | 49.6 | 55.3 | 57.0 | 59.4 | 66.7 |
| 3 | 60.6 | 66.6 | 68.1 | 67.6 | 73.9 |
| 4 | 62.3 | 67.3 | 67.1 | 66.3 | 70.7 |
| 5 | 82.5 | 86.3 | 83.5 | 84.1 | 85.5 |
| 6 | 64.5 | 70.4 | 68.7 | 68.2 | 73.4 |
| 7 | 67.7 | 73.0 | 72.0 | 72.0 | 74.0 |
| 8 | 56.0 | 60.9 | 61.9 | 59.9 | 66.4 |
| 9 | 44.0 | 45.8 | 47.8 | 47.5 | 52.7 |
| 10 | 67.8 | 70.8 | 71.4 | 70.4 | 76.9 |
| 11 | 74.6 | 78.4 | 77.1 | 78.0 | 79.5 |
| 12 | 12.6 | 14.0 | 29.5 | 27.4 | 35.6 |
| 13 | 43.8 | 54.0 | 54.9 | 54.3 | 57.1 |
| 14 | 56.8 | 61.6 | 63.3 | 63.2 | 66.5 |
| 15 | 40.1 | 23.9 | 42.3 | 40.4 | 47.6 |
| 16 | 45.2 | 25.9 | 42.6 | 40.8 | 60.6 |
| 17 | 69.5 | 60.5 | 63.2 | 62.5 | 69.3 |
| 18 | 51.8 | 47.5 | 55.5 | 54.6 | 59.5 |
| 19 | 51.2 | 63.9 | 55.7 | 52.6 | 68.6 |
| 20 | 85.1 | 83.8 | 82.0 | 81.4 | 84.0 |
| 21 | 91.9 | 90.8 | 88.7 | 88.4 | 89.5 |
| 22 | 93.7 | 93.5 | 92.6 | 93.2 | 94.0 |
| 23 | 54.0 | 58.5 | 53.0 | 53.5 | 62.6 |
| 24 | 71.1 | 73.7 | 72.7 | 73.4 | 76.9 |
| 25 | 44.2 | 4.8 | 42.1 | 44.1 | 58.0 |
| 26 | 56.4 | 59.7 | 70.2 | 65.9 | 65.9 |
| 57.8 | 57.7 | 61.5 | 60.9 | 67.3 |
| Method | (%) | (%) | (%) | Params(M) | FLOPs(G) | FPS |
|---|---|---|---|---|---|---|
| Baseline | 34.8 | 61.5 | 79.1 | 41.24 | 206.78 | 22 |
| +MFPN | 37.6 | 64.9 | 80.7 | 41.27 | 207.03 | 21 |
| +AFRPN | 35.5 | 61.8 | 87.8 | 41.53 | 206.84 | 18 |
| +MFPN+AFRPN | 38.3 | 67.3 | 89.3 | 42.12 | 207.70 | 17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, S.; Du, J.; Jiao, L.; Wang, F.; Liu, K.; Teng, Y.; Wang, R. Automatic Crop Pest Detection Oriented Multiscale Feature Fusion Approach. Insects 2022, 13, 554. https://doi.org/10.3390/insects13060554
Dong S, Du J, Jiao L, Wang F, Liu K, Teng Y, Wang R. Automatic Crop Pest Detection Oriented Multiscale Feature Fusion Approach. Insects. 2022; 13(6):554. https://doi.org/10.3390/insects13060554
Chicago/Turabian StyleDong, Shifeng, Jianming Du, Lin Jiao, Fenmei Wang, Kang Liu, Yue Teng, and Rujing Wang. 2022. "Automatic Crop Pest Detection Oriented Multiscale Feature Fusion Approach" Insects 13, no. 6: 554. https://doi.org/10.3390/insects13060554
APA StyleDong, S., Du, J., Jiao, L., Wang, F., Liu, K., Teng, Y., & Wang, R. (2022). Automatic Crop Pest Detection Oriented Multiscale Feature Fusion Approach. Insects, 13(6), 554. https://doi.org/10.3390/insects13060554