



Experimental Study on Vibration Velocity of Piled Raft Supported Embankment and Foundation for Ballastless High Speed Railway



Abstract
:1. Introduction
2. Experiment Overview
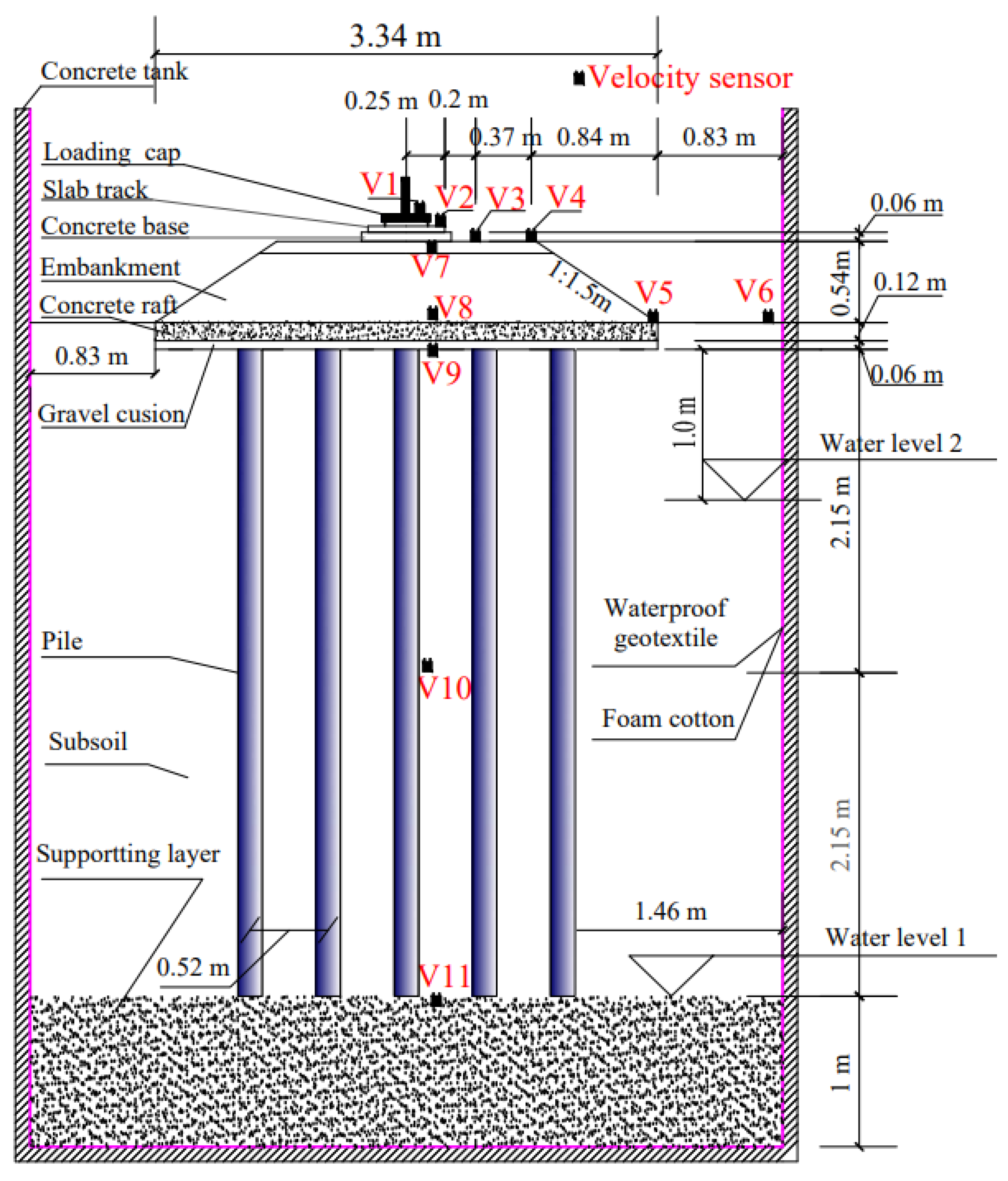
2.1. Experimental Model
2.2. Applied Dynamic Load
3. Results and Discussions
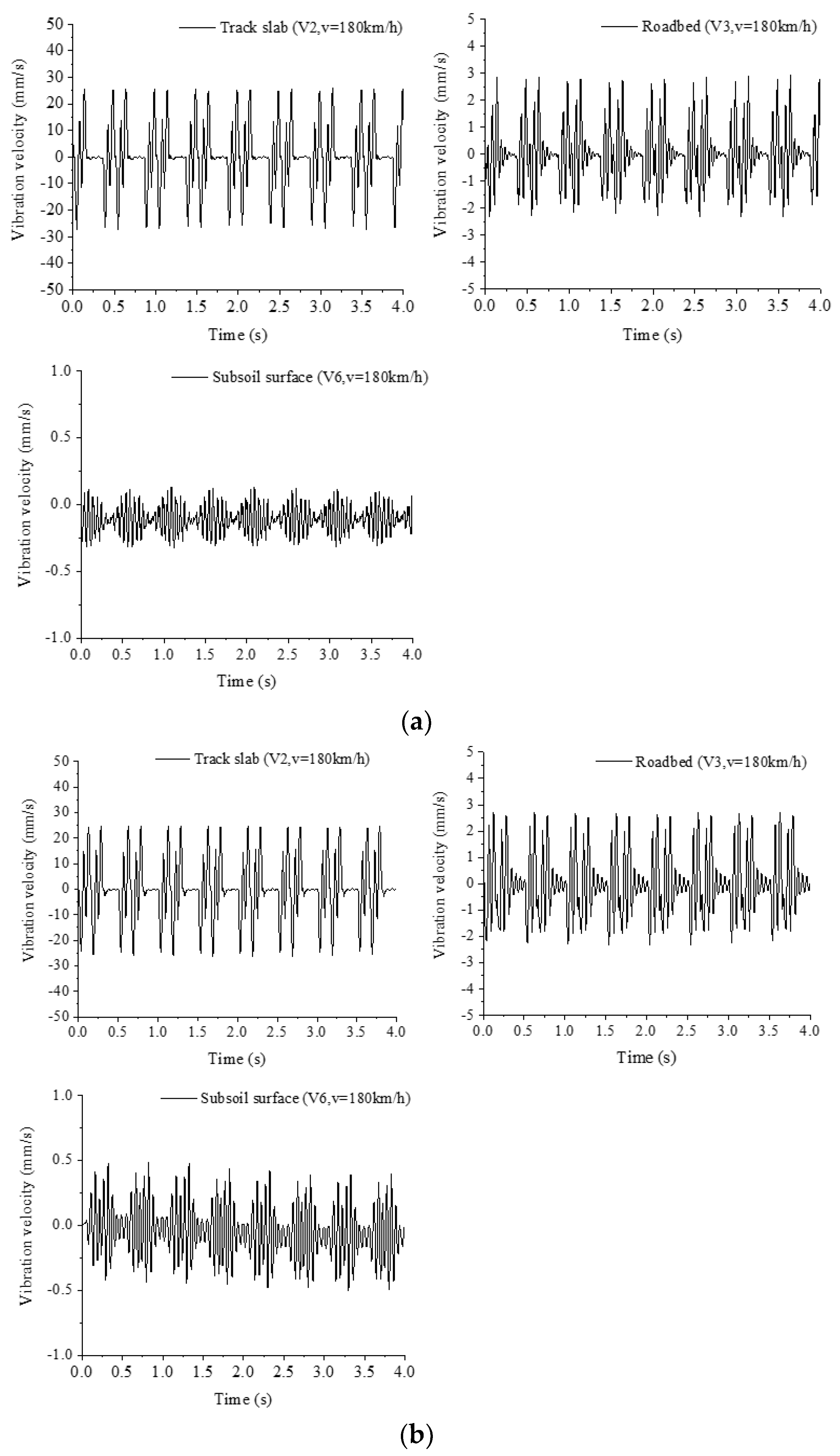
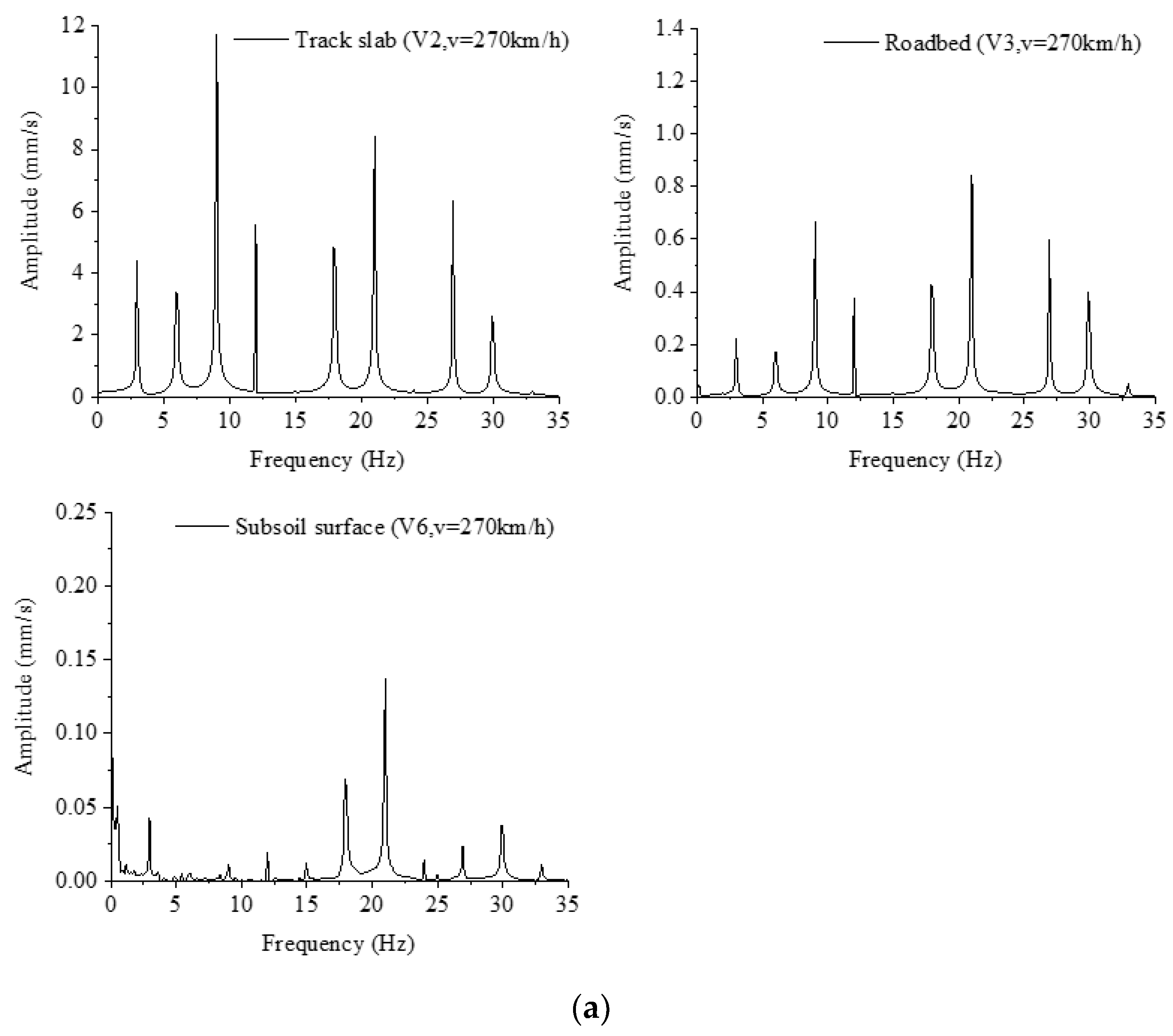
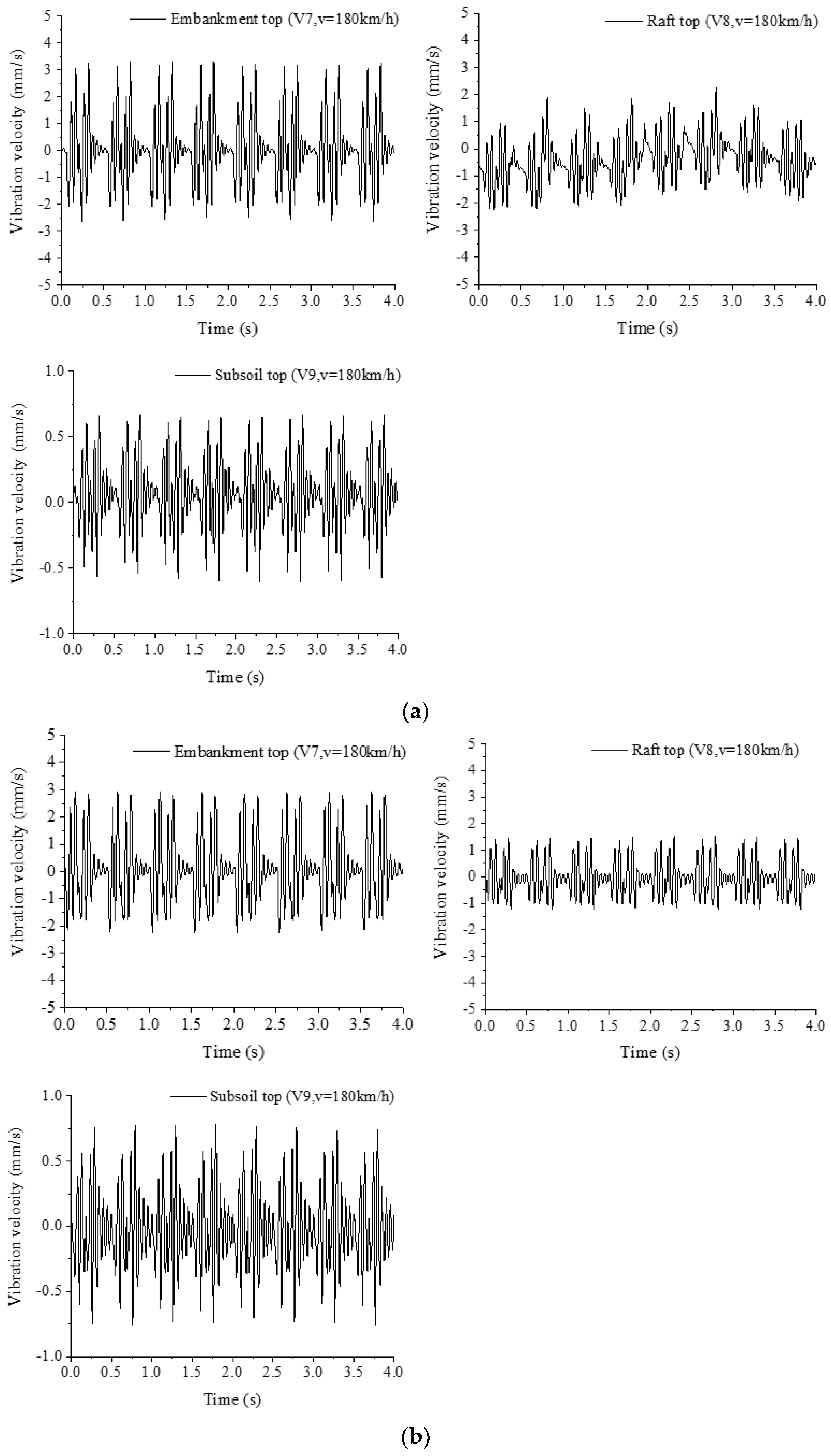
3.1. Analysis of Vibration Velocities in Time and Frequency Domain
3.2. Distribution of Vibration Velocities in Piled Raft Foundation
3.3. Influence of Train Speeds
4. Conclusions
- (1)
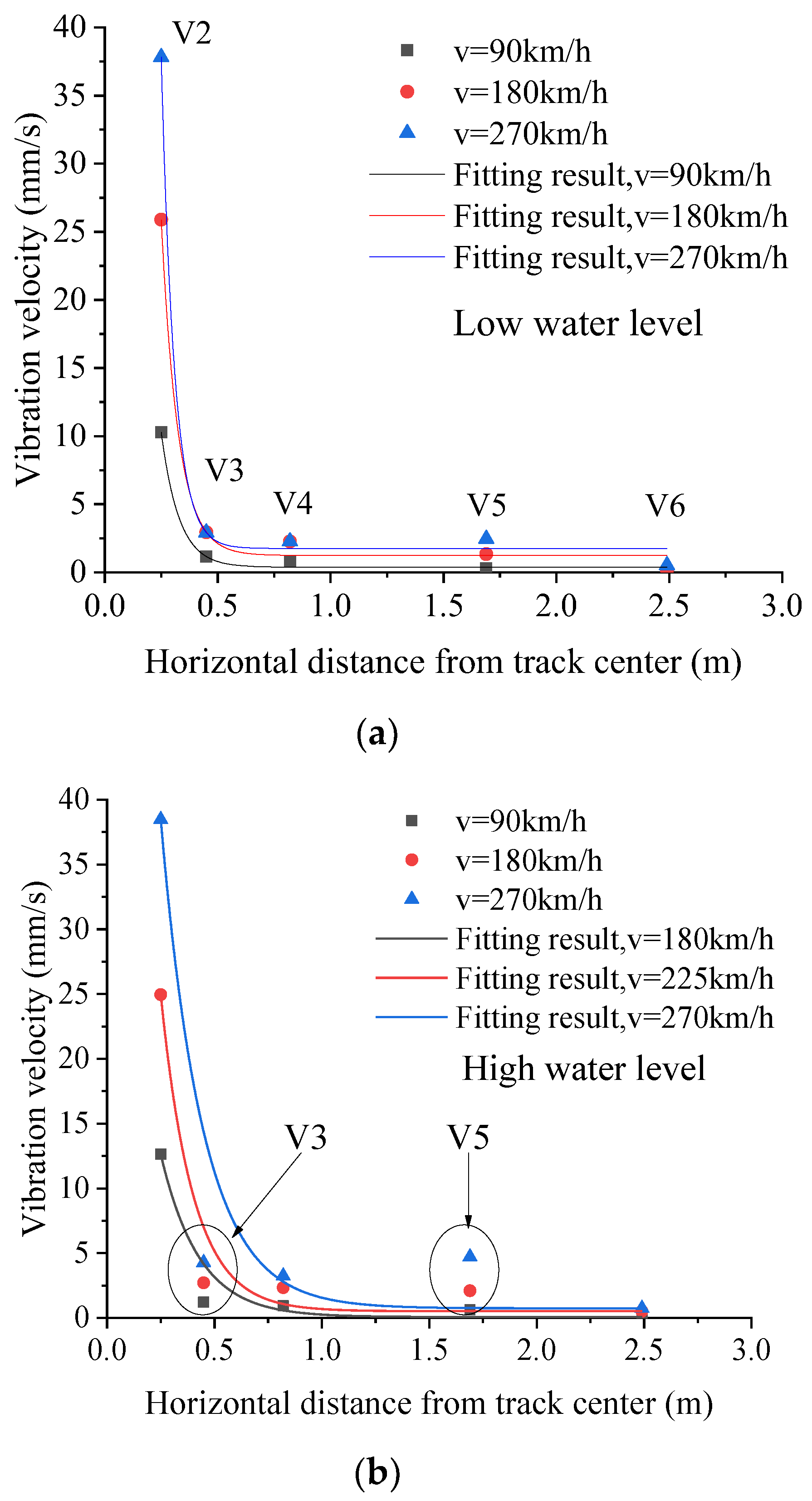
- The time history and peak vibration velocity of the track structure, roadbed, embankment, and piled raft foundation are clearly visible and have sharp impulse and relaxation patterns, corresponding to the loading of train wheels, bogies, and passages. Vibration velocity at the track slab is much stronger than that at roadbed, and sharply decreases when transmitting from track slab to roadbed, reducing by nearly 90%, comes to about 98% at the subsoil surface.
- (2)
- Most of the frequency contents of vibration velocity at various locations are mainly concentrated at harmonic frequencies of 2 Hz, 4 Hz, 6 Hz, 8 Hz, 12 Hz, 18 Hz, 20 Hz for the train speed of 180 km/h, of which the frequency 2 Hz, 6 Hz, and 20 Hz correspond to one carriage length of 25 m, the adjacent bogie spacing of 7.5 m and two wheels spacing of 2.5 m. The change of water level has slight impac on the peak spectrum of vibration velocity at harmonic frequencies.
- (3)
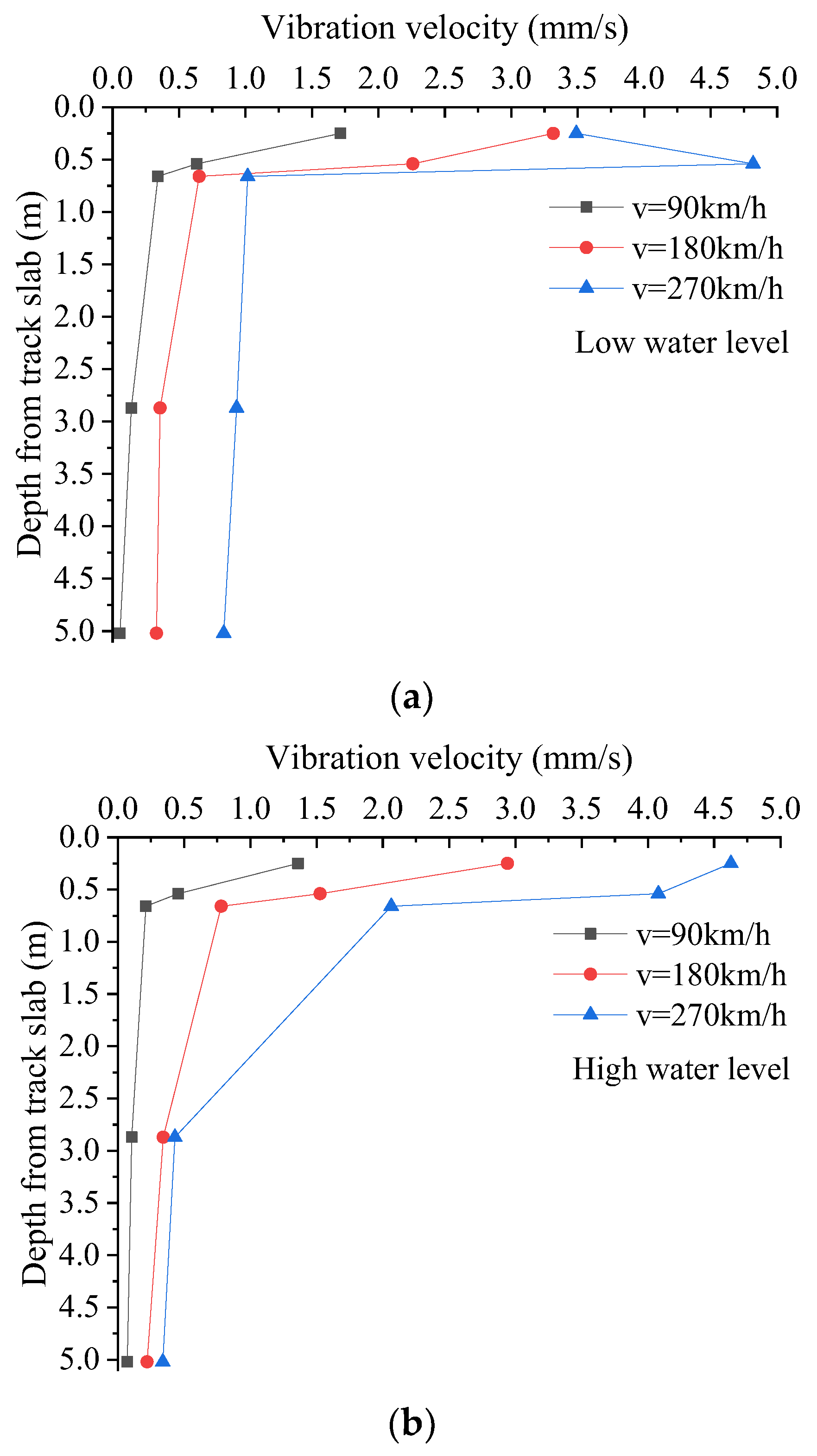
- The vibration velocity levels inside the embankment and subsoil are lower than those on the surface of the track structure and embankment, but still have visible impulse. Vibration velocities decrease quickly in the roadbed and embankment, and then the decreasing rates slow down. With the increase of soil depth, the differences of dynamic velocities in subsoils between different locations become smaller and have very low values.
- (4)
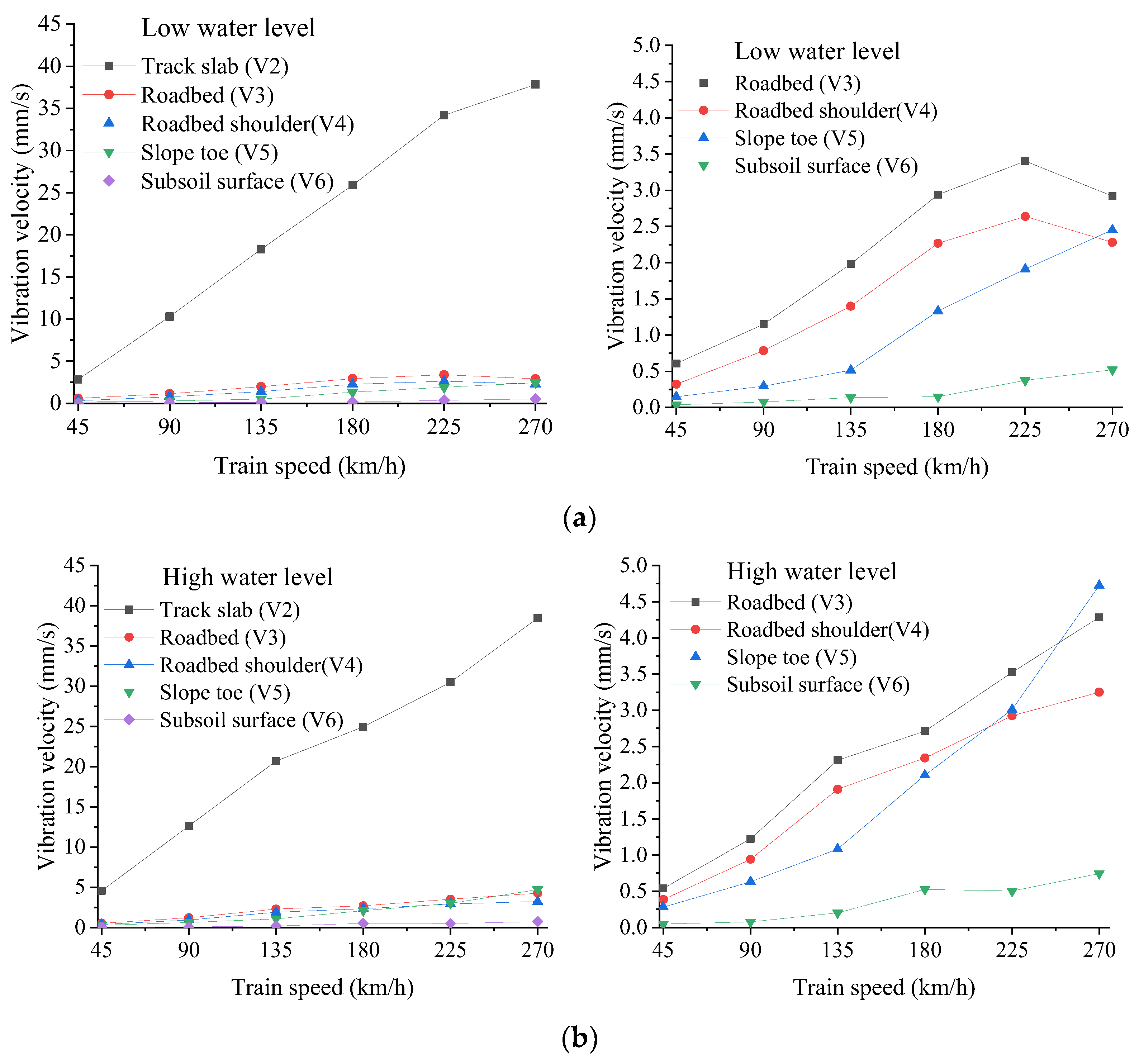
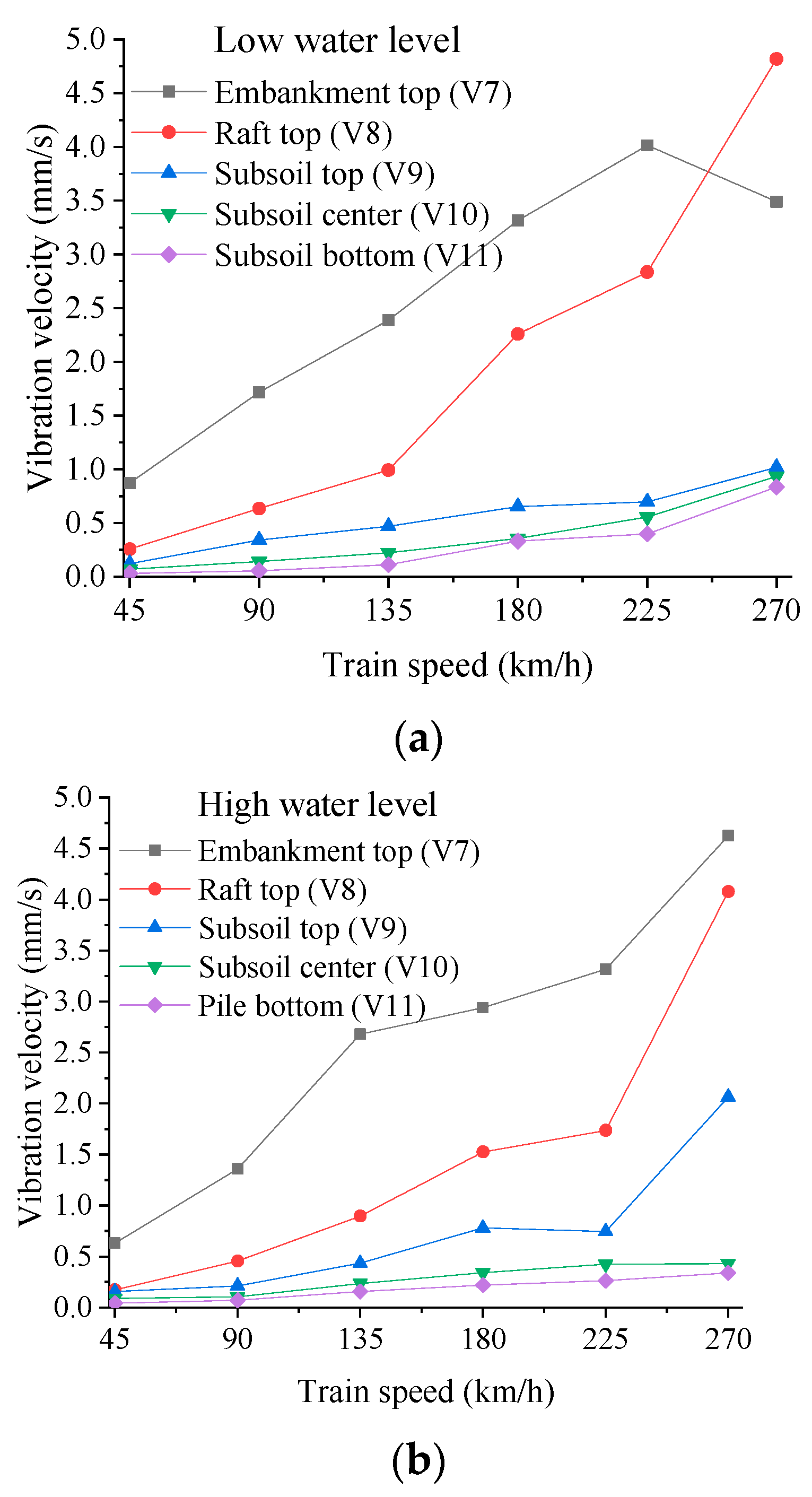
- The dynamic responses of track slab, roadbed, embankment, piled raft, and subsoils are dominated by the dimensions of trains, properties of vibration medium, and load excitation sources. The vibration absorption and attenuation of the embankment and piled raft structure also influence the vibration load transmission and attenuation. The train speeds have more impact on the vibration attenuation in both track structure and substructure.
- (5)
- The vibration velocity attenuations mainly follow the distribution law of exponential curve at different train speed, which can give some empirical guidance for further prediction and analysis on the vibration velocity response of ballastless slab track, embankment, and piled raft supported foundations. The piled raft structure will produce a resistance and excitation effect on the vibration of upper embankment materials.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Madshus, C.; Kaynia, A.M. High-speed railway lines on soft ground: Dynamic behavior at critical train speed. J. Sound Vib. 2000, 231, 689–701. [Google Scholar] [CrossRef] [Green Version]
- Zhenning, B.A.; Liang, J.; Lee, V.W.; Gao, Y. A semi-analytical method for vibrations of a layered transversely isotropic ground-track system due to moving train loads. Soil Dyn. Earthq. Eng. 2019, 121, 25–39. [Google Scholar]
- Xu, L.; Zhai, W. A three-dimensional dynamic model for train-track interactions. Appl. Math. Model. 2019, 76, 443–465. [Google Scholar] [CrossRef]
- Hu, P.; Zhang, C.; Wen, S.; Wang, Y. Dynamic responses of high-speed railway transition zone with various subgrade fillings. Comput. Geotech. 2019, 108, 17–26. [Google Scholar] [CrossRef]
- Yang, L.A.; Powrie, W.; Priest, J.A. Dynamic stress analysis of a ballasted railway track bed during train passage. J. Geotech. Geoenviron. Eng. 2009, 135, 680–689. [Google Scholar] [CrossRef]
- Bian, X.; Jiang, H.; Cheng, C.; Chen, Y.; Chen, R.; Jiang, J. Full-scale model testing on a ballastless high-speed railway under simulated train moving loads. Soil Dyn. Earthq. Eng. 2014, 66, 368–384. [Google Scholar] [CrossRef]
- Hall, L. Simulations and analyses of train-induced ground vibrations in finite element models. Soil Dyn. Earthq. Eng. 2003, 23, 403–413. [Google Scholar] [CrossRef]
- Tang, Y.; Xiao, S.; Yang, Q. Numerical study of dynamic stress developed in the high speed rail foundation under train loads. Soil Dyn. Earthq. Eng. 2019, 123, 36–47. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, C.; Zhai, W. Importance of load frequency in applying cyclic loads to investigate ballast deformation under high-speed train loads. Soil Dyn. Earthq. Eng. 2019, 120, 28–38. [Google Scholar] [CrossRef]
- Bian, X.; Jiang, H.; Chang, C.; Hu, J.; Chen, Y. Track and ground vibrations generated by high-speed train running on ballastless railway with excitation of vertical track irregularities. Soil Dyn. Earthq. Eng. 2015, 76, 29–43. [Google Scholar] [CrossRef]
- Bian, X.; Cheng, C.; Jiang, J.; Chen, R.; Chen, Y. Numerical analysis of soil vibrations due to trains moving at critical speed. Acta Geotech. 2016, 11, 28–294. [Google Scholar] [CrossRef]
- Yao, H.L.; Hu, Z.; Lu, Z.; Zhan, Y.X.; Liu, J. Prediction of ground vibration from high speed trains using a vehicle–track–ground coupling model. Int. J. Struct. Stab. Dyn. 2016, 6, 1550051. [Google Scholar] [CrossRef]
- Momoya, Y.; Sekine, E.; Tatsuoka, F. Deformation characteristics of railway roadbed and subgrade under moving-wheel load. Soils Found. 2005, 45, 99–118. [Google Scholar] [CrossRef] [Green Version]
- Ishikawa, T.; Sekine, E.; Miura, S. Cyclic deformation of granular material subjected to moving-wheel loads. Can. Geotech. J. 2011, 48, 691–703. [Google Scholar] [CrossRef] [Green Version]
- Al Shaer, A.; Duhamel, D.; Sab, K.; Foret, G.; Schmitt, L. Experimental settlement and dynamic behavior of a portion of ballasted railway track under high speed trains. J. Sound Vib. 2008, 316, 211–233. [Google Scholar] [CrossRef] [Green Version]
- Yuan, B.; Li, Z.; Chen, W.; Zhao, J.; Lv, J.; Song, J.; Cao, X. Influence of Groundwater Depth on Pile–Soil Mechanical Properties and Fractal Characteristics under Cyclic Loading. Fractal Fract. 2022, 6, 198. [Google Scholar] [CrossRef]
- Yuan, B.; Chen, M.; Chen, W.; Luo, Q.; Li, H. Effect of Pile-Soil Relative Stiffness on Deformation Characteristics of the Laterally Loaded Pile. Adv. Mater. Sci. Eng. 2022, 2022, 4913887. [Google Scholar] [CrossRef]
- Yuan, B.; Chen, W.; Zhao, J.; Li, L.; Liu, F.; Guo, Y.; Zhang, B. Addition of alkaline solutions and fibers for the reinforcement of kaolinite-containing granite residual soil. Appl. Clay Sci. 2022, 228, 106644. [Google Scholar] [CrossRef]
- Yuan, B.; Chen, W.; Zhao, J.; Yang, F.; Luo, Q.; Chen, T. The Effect of Organic and Inorganic Modifiers on the Physical Properties of Granite Residual Soil. Adv. Mater. Sci. Eng. 2022, 2022, 9542258. [Google Scholar] [CrossRef]
- Lee, J.; Kim, Y.; Jeong, S. Three-dimensional analysis of bearing behavior of piled raft on soft clay. Comput. Geotech. 2010, 37, 103–114. [Google Scholar] [CrossRef]
- Alnuaim, A.M.; El Naggar, M.H.; El Naggar, H. Performance of micropiled raft in clay subjected to vertical concentrated load: Centrifuge modeling. Can. Geotech. J. 2015, 52, 1–54. [Google Scholar] [CrossRef]
- Kumar, A.; Choudhury, D. Development of new prediction model for capacity of combined pile-raft foundations. Comput. Geotech. 2018, 97, 62–68. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W.; Elbeltagi, E. Pile-Raft Settlements Prediction under Coupled Static-Dynamic Loads using Two Heuristic Regression Approaches. Shock Vib. 2018, 2018, 3425461. [Google Scholar]
- Horikoshi, K.; Matsumoto, T.; Hashizume, Y.; Watanabe, T. Performance of piled raft foundations subjected to dynamic loading. Int. J. Phys. Model. Geotech. 2003, 3, 51–62. [Google Scholar] [CrossRef]
- Liu, C.L.; Ai, Z.Y. Vertical harmonic vibration of piled raft foundations in layered soils. Int. J. Numer. Anal. Methods Geomech. 2017, 41, 1711–1723. [Google Scholar] [CrossRef]
- Nagai, H. Simplified method of estimating the dynamic impedance of a piled raft foundation subjected to inertial loading due to an earthquake. Comput. Geotech. 2019, 105, 69–78. [Google Scholar] [CrossRef]
- Varghese, R.; Boominathan, A.; Banerjee, S. Stiffness and load sharing characteristics of piled raft foundations subjected to dynamic loads. Soil Dyn. Earthq. Eng. 2020, 133, 1–15. [Google Scholar] [CrossRef]
- Sun, G.; Kong, G.; Liu, H.; Amenuvor, A.C. Vibration velocity of X-section cast-in-place concrete (XCC) pile–raft foundation model for a ballastless track. Can. Geotech. J. 2017, 54, 1340–1345. [Google Scholar] [CrossRef]
- Priest, J.A.; Powrie, W.; Yang, L.; Grabe, P.J.; Clayton, C.R. Measurements of transient ground movements below a ballasted railway line. Géotechnique 2010, 60, 667–677. [Google Scholar] [CrossRef]
- Bian, X.; Jiang, H.; Chen, Y.; Jiang, J.; Han, J. A full-scale physical model test apparatus for investigating the dynamic performance of the slab track system of a high-speed railway. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2016, 230, 554–571. [Google Scholar] [CrossRef]
- Hu, P.; Zhang, C.; Chen, S.J.; Wang, Y.; Wang, W.; Duan, W.H. Dynamic responses of bridge–embankment transitions in high speed railway: Field tests and data analyses. Eng. Struct. 2018, 175, 565–576. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Scale Factors | Parameters | Scale Factors |
|---|---|---|---|
| Load | 1:25 | velocity | 1 |
| stress | 1 | time | 1:5 |
| volume | 1:125 | length | 1:5 |
| frequency | 5 | modulus | 1 |
| density | 1 |
| Model | ExpDec1 | |||||
|---|---|---|---|---|---|---|
| Equation | y = A1exp(−x/t1) + y0 | |||||
| Train speed | v = 90 km/h | v = 180 km/h | v = 270 km/h | |||
| Water level | LWL | HWL | LWL | HWL | LWL | HWL |
| y0 | 0.38 | 0.078 | 1.24 | 0.525 | 1.75 | 0.744 |
| A1 | 238 | 51 | 687 | 128 | 2619 | 134 |
| t1 | 0.079 | 0.178 | 0.075 | 0.151 | 0.058 | 0.196 |
| Reduced Chi-Sqr | 0.129 | 4.55 | 1.113 | 11.23 | 1.141 | 58.6 |
| RSquare (COD) | 0.9966 | 0.92 | 0.9953 | 0.947 | 0.9978 | 0.883 |
| Adjusted RSquare | 0.9933 | 0.841 | 0.9906 | 0.895 | 0.9957 | 0.766 |
| Train Speed | v = 90 km/h | v = 180 km/h | v = 270 km/h | |||
|---|---|---|---|---|---|---|
| Water Level | LWL | HWL | LWL | HWL | LWL | HWL |
| Locations | Percent | Percent | Percent | Percent | Percent | Percent |
| V2 | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| V3 | 88.83% | 90.30% | 88.65% | 89.13% | 92.28% | 88.86% |
| V4 | 92.37% | 92.54% | 91.24% | 90.61% | 93.97% | 91.55% |
| V5 | 97.12% | 95.00% | 94.85% | 91.57% | 93.52% | 87.72% |
| V6 | 99.24% | 99.38% | 99.42% | 97.89% | 98.62% | 98.06% |
| Train Speed | v = 90 km/h | v = 180 km/h | v = 270 km/h | |||
|---|---|---|---|---|---|---|
| Water Level | LWL | HWL | LWL | HWL | LWL | HWL |
| Locations | Percent | Percent | Percent | Percent | Percent | Percent |
| V7 | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% | 0.00% |
| V8 | 63.01% | 66.53% | 42.25% | 48.06% | −38.11% | 11.85% |
| V9 | 80.08% | 84.38% | 80.33% | 73.42% | 70.86% | 55.40% |
| V10 | 91.75% | 92.25% | 90.28% | 88.34% | 73.25% | 90.68% |
| V11 | 96.75% | 94.73% | 91.06% | 92.48% | 76.02% | 92.65% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Q.; Gu, M.; Yuan, J.; Lin, Y. Experimental Study on Vibration Velocity of Piled Raft Supported Embankment and Foundation for Ballastless High Speed Railway. Buildings 2022, 12, 1982. https://doi.org/10.3390/buildings12111982
Fu Q, Gu M, Yuan J, Lin Y. Experimental Study on Vibration Velocity of Piled Raft Supported Embankment and Foundation for Ballastless High Speed Railway. Buildings. 2022; 12(11):1982. https://doi.org/10.3390/buildings12111982
Chicago/Turabian StyleFu, Qiang, Meixiang Gu, Jie Yuan, and Yifeng Lin. 2022. "Experimental Study on Vibration Velocity of Piled Raft Supported Embankment and Foundation for Ballastless High Speed Railway" Buildings 12, no. 11: 1982. https://doi.org/10.3390/buildings12111982
APA StyleFu, Q., Gu, M., Yuan, J., & Lin, Y. (2022). Experimental Study on Vibration Velocity of Piled Raft Supported Embankment and Foundation for Ballastless High Speed Railway. Buildings, 12(11), 1982. https://doi.org/10.3390/buildings12111982