
Control of an IPMC Soft Actuator Using Adaptive Full-Order Recursive Terminal Sliding Mode

 ,
,  , ,
, ,  ,
,  ,
, 
Abstract
:1. Introduction
2. Plant Modelling
3. Control Design
3.1. Construction of the AFORTSM Controller
3.2. Stability Analysis
3.3. Control Parameter Selections
- (1)
- (2)
- Selections of λ, β: As given in (14) and (15), a larger or a smaller in (10) implies a smaller bound of convergence time for but at the cost of increased control input amplitude. In addition, a larger value of will increase the amplitude of the integral element, which implies a smaller steady-state tracking error [34]. Here, we select , .
- (3)
- Selections of (): To achieve a fast estimation of the control gain, the values of can be selected to be sufficiently small as indicated in (17)–(20). However, too small may cause severer overestimation or even lead to the IPMC actuator saturation. Through some tuning in the experiments, , are fixed for the tests.
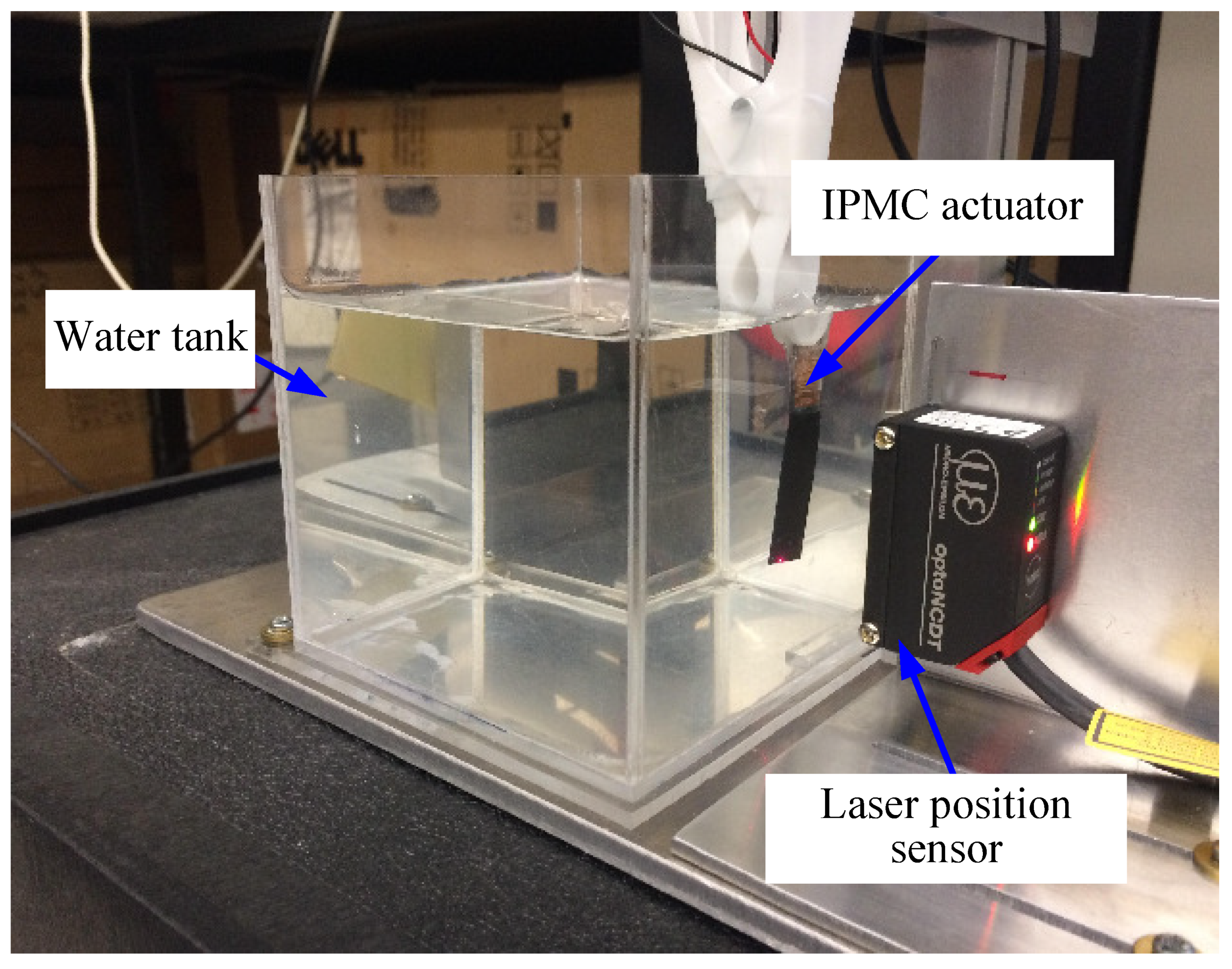
4. Experimental Results
- Without uncertainty: IPMC actuator is fully submerged in the water;
- With uncertainty: IPMC actuator is partially (three-quarters) submerged in the water;
- With disturbance: A shock electrical signal is added onto the control input.
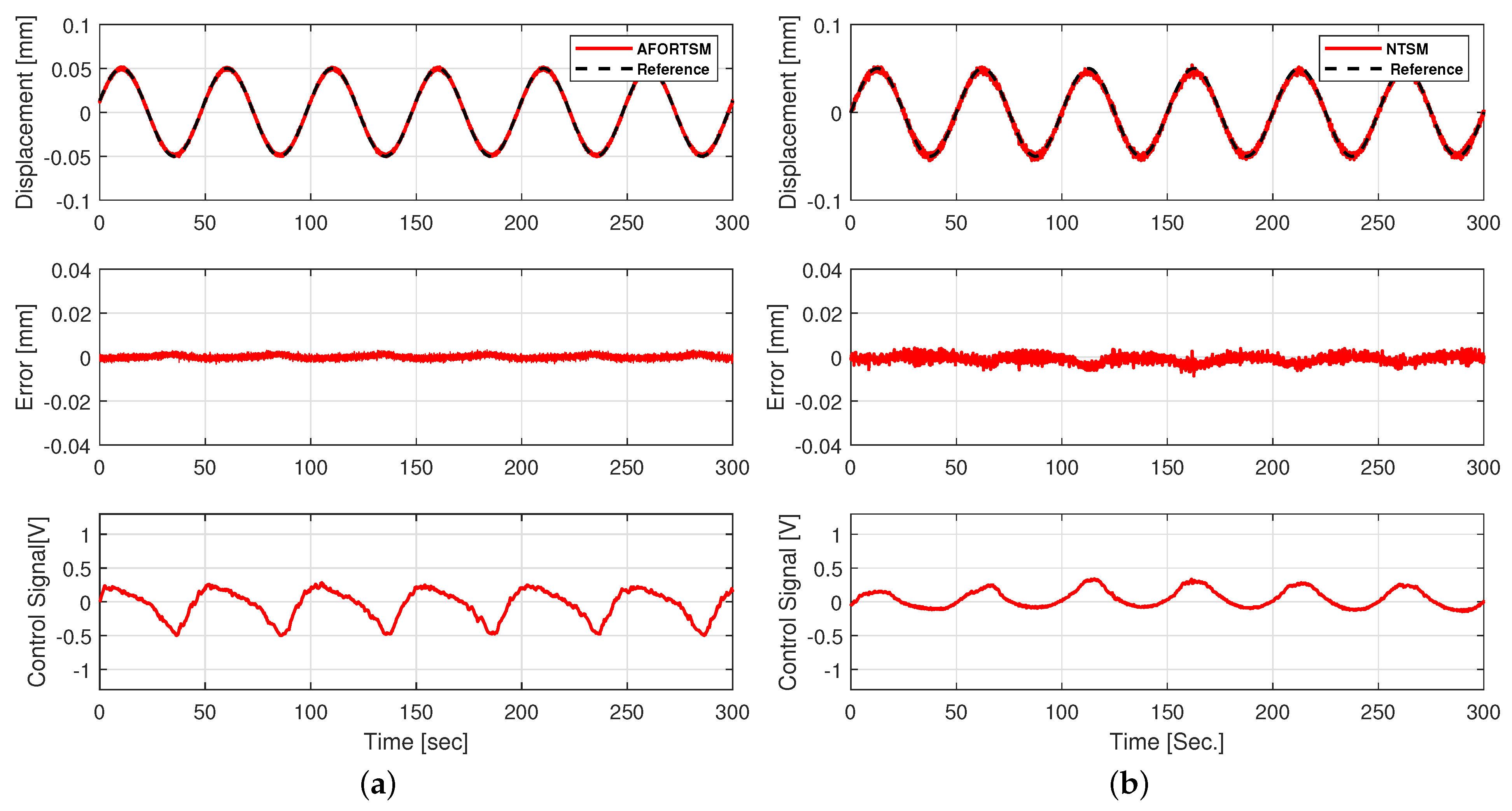
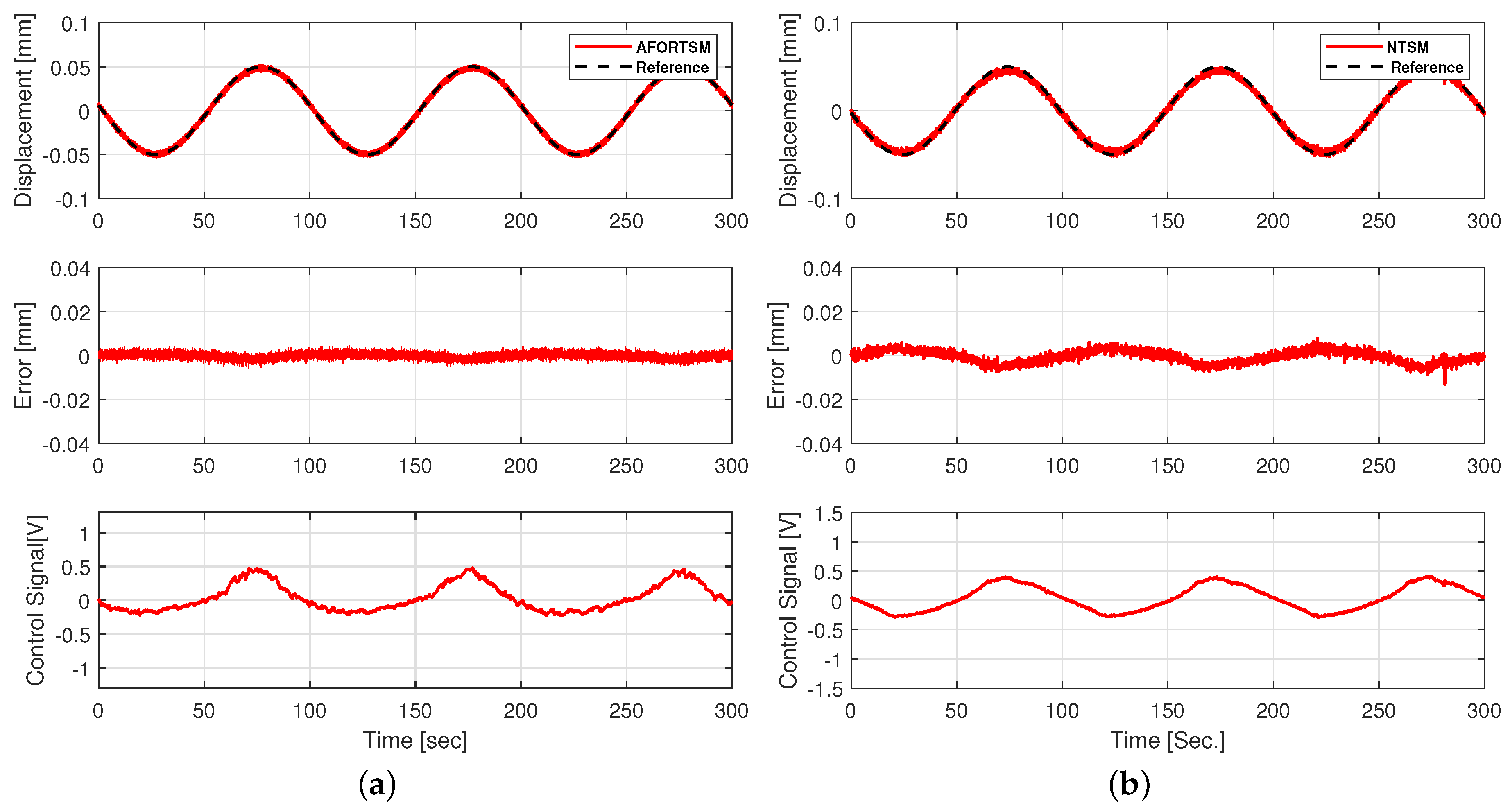
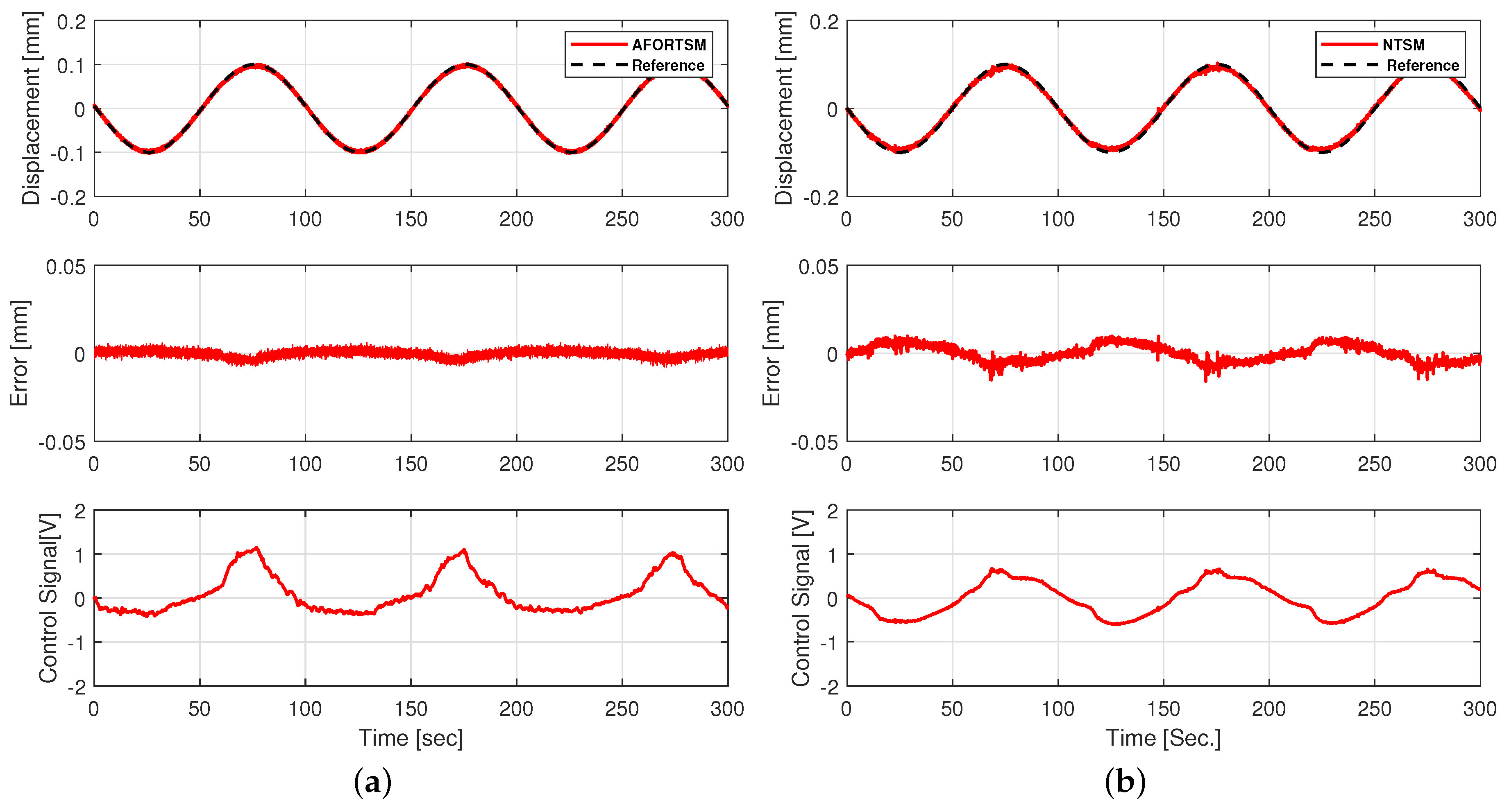
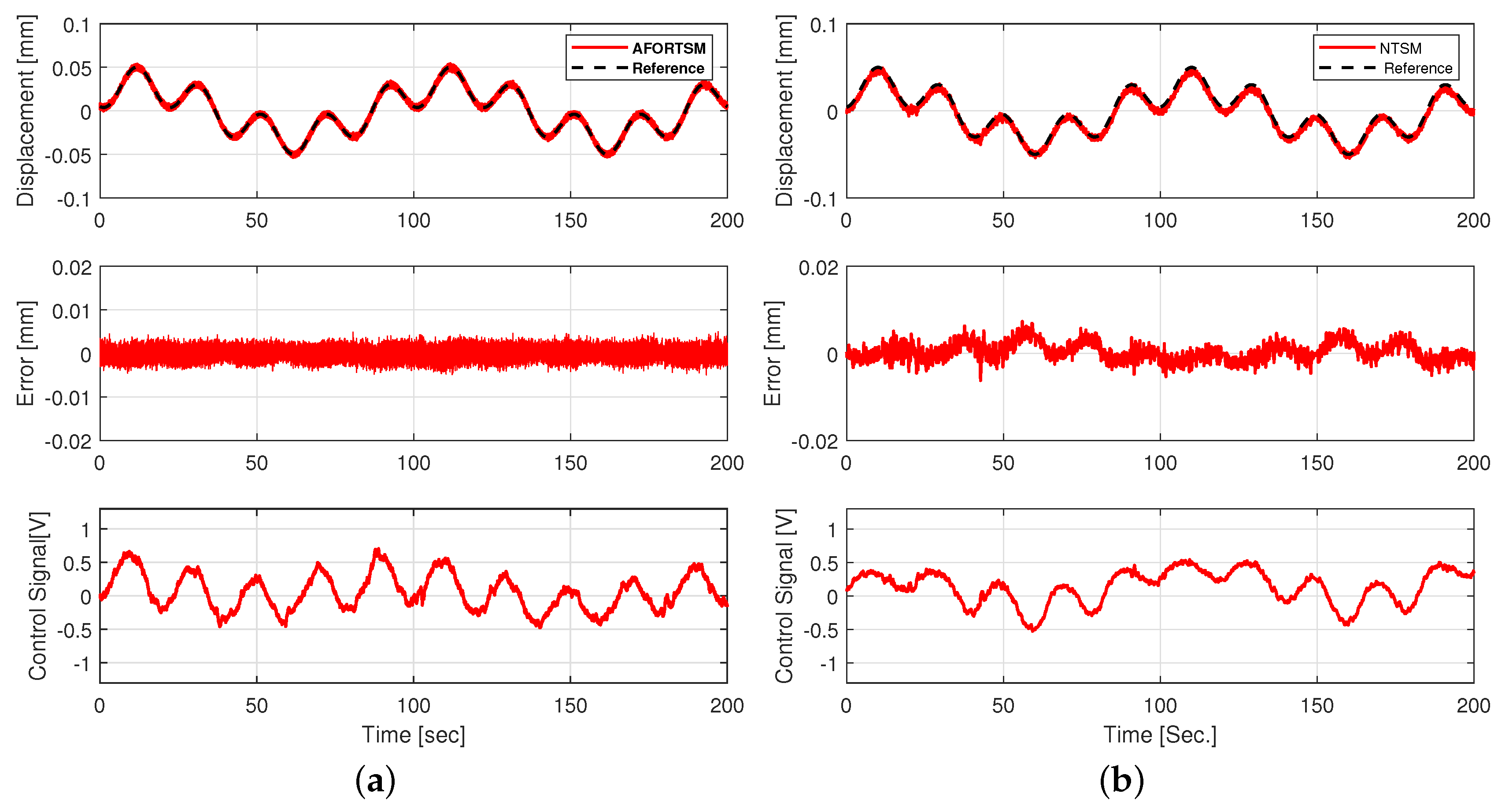
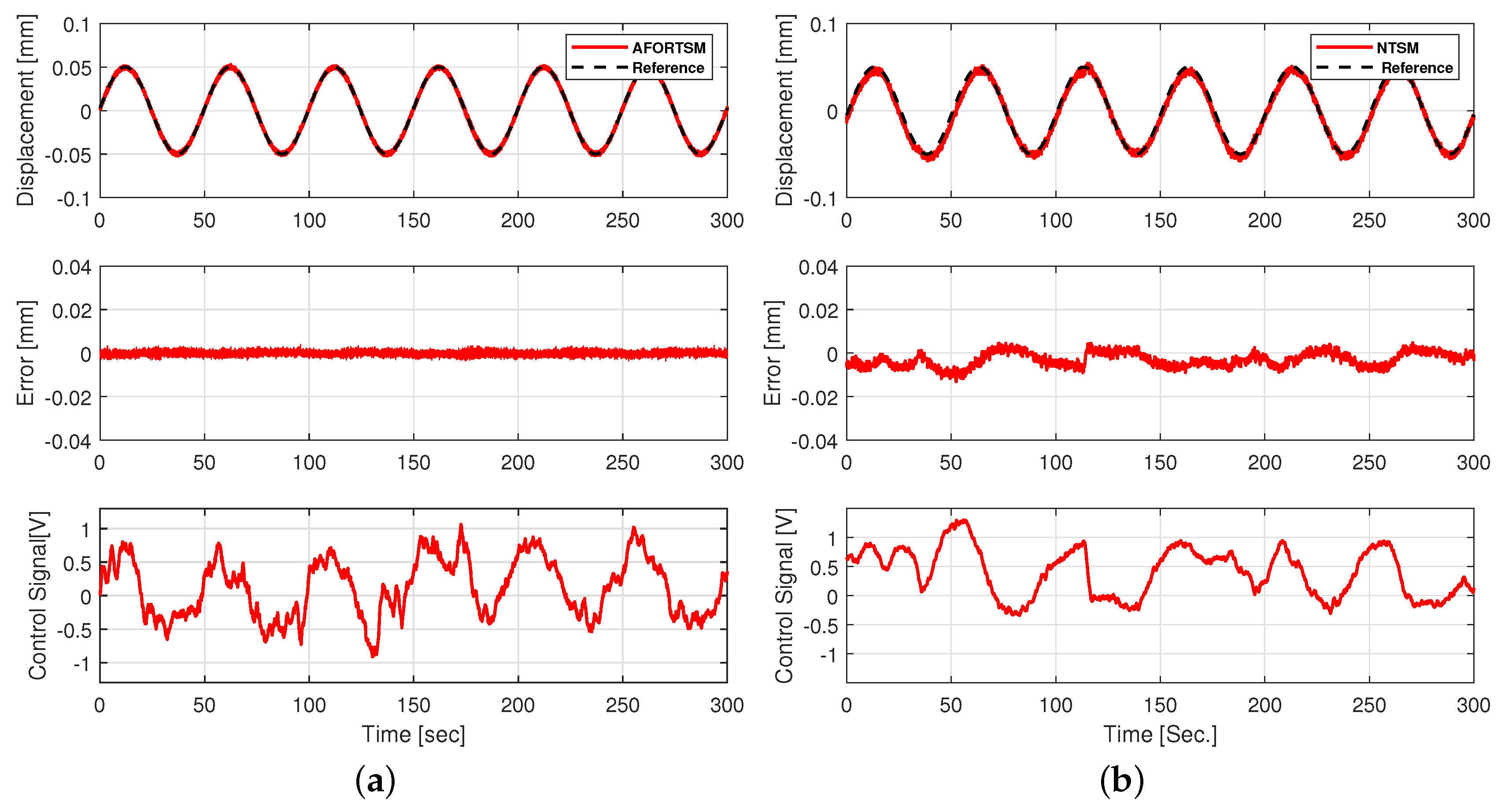
4.1. Single-Tone Sinusoidal Tracking
4.2. Dual-Tone Sinusoidal Tracking
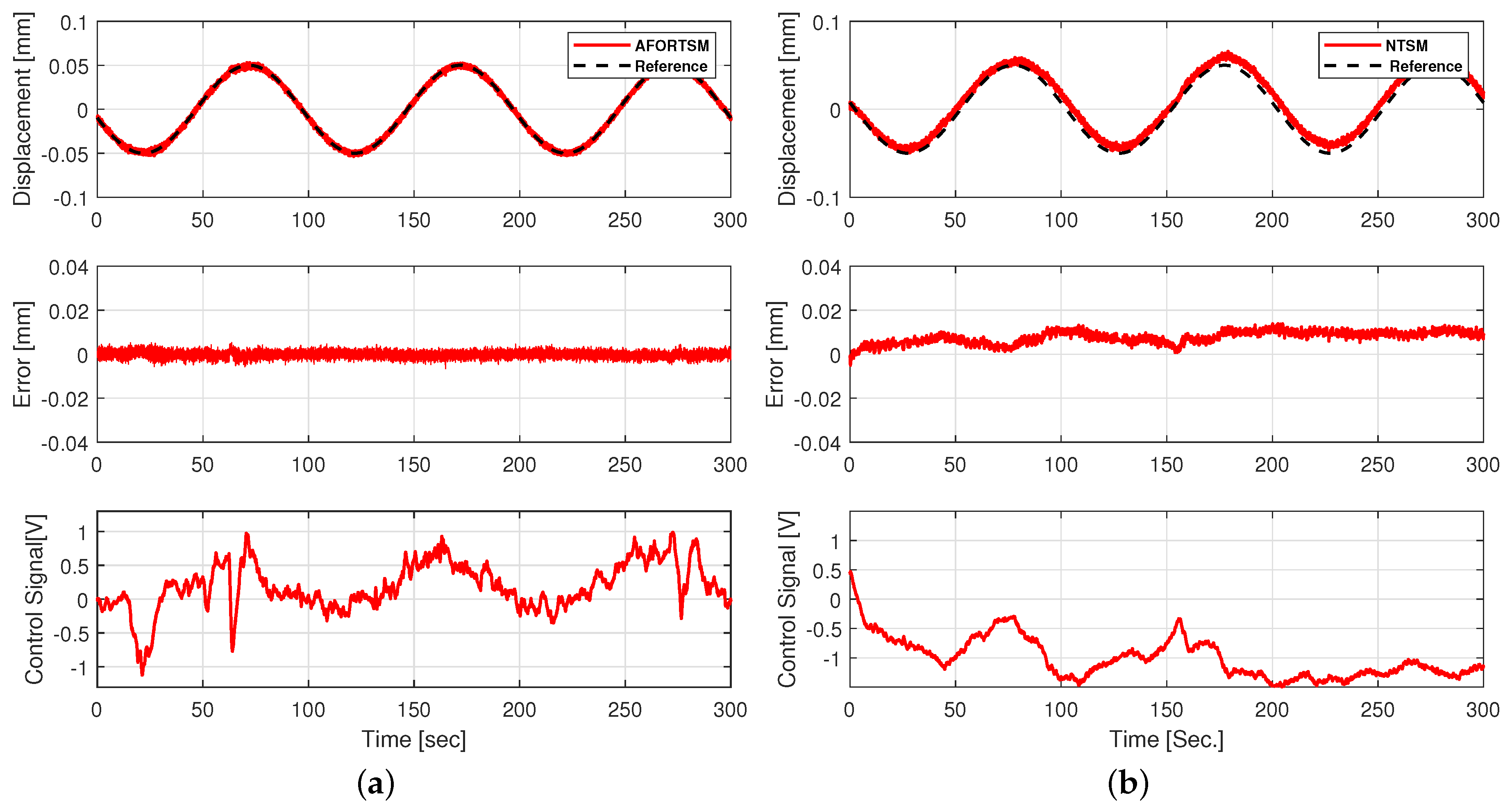
4.3. Robustness Verification
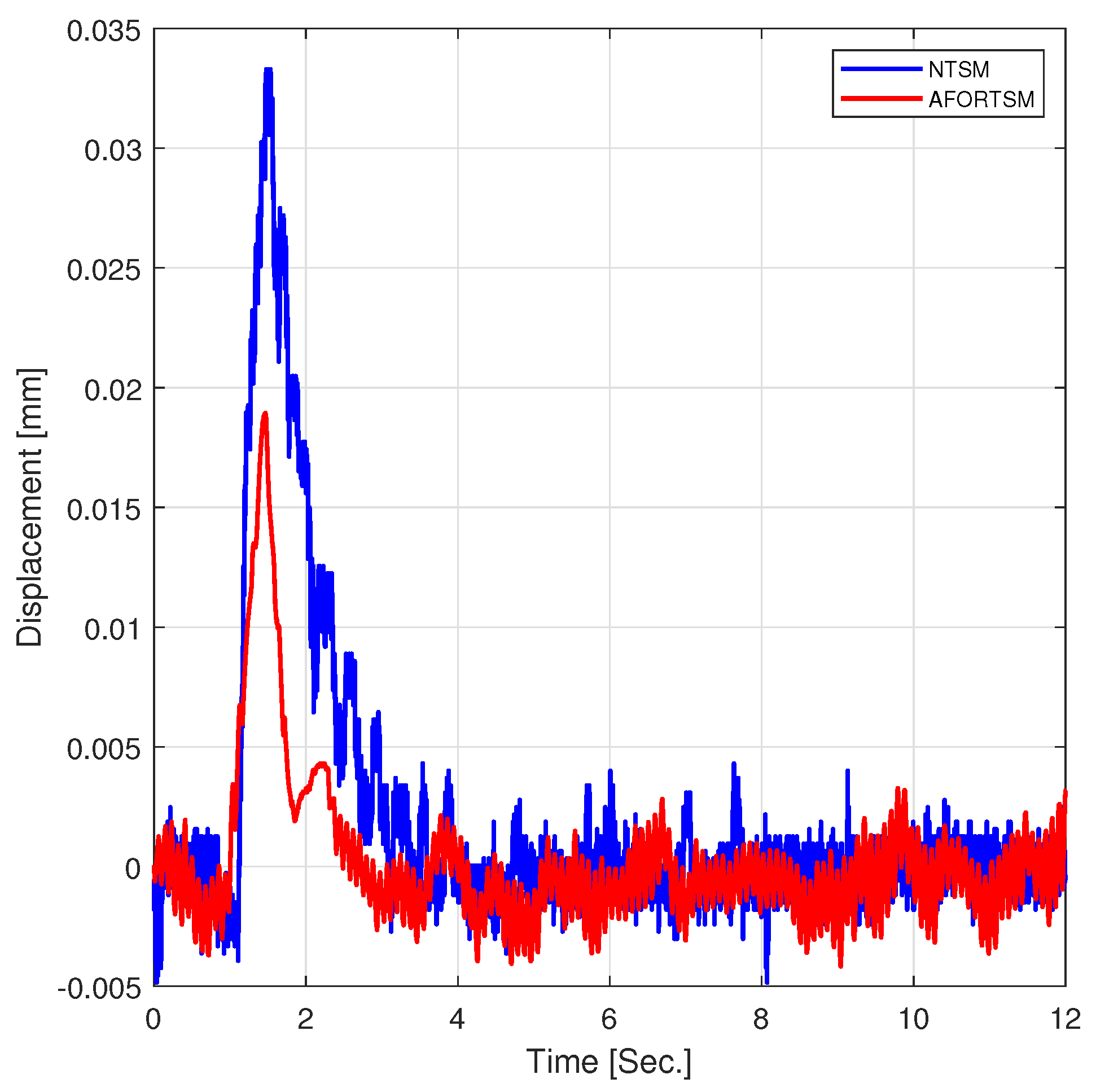
4.4. Disturbance Rejection
4.5. Summary and Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst. 2020, 2, 2000128. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.W.; Kim, H.C.; Zhai, L.; Ko, H.U.; Muthoka, R.M. Review of soft actuator materials. Int. J. Precis. Eng. Manuf. 2019, 20, 2221–2241. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; McDaid, A.; Sharma, R.; Aw, K.C. A compact ionic polymer metal composite (IPMC) system with inductive sensor for closed loop feedback. Actuators 2015, 4, 114–126. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K.; Nam, D.N.C.; Yoon, J.I. Identification of a nonlinear black-box model for a self-sensing polymer metal composite actuator. Smart Mater. Struct. 2010, 19, 085015. [Google Scholar] [CrossRef]
- Nemat-Nasser, S.; Li, J.Y. Electromechanical response of ionic polymer-metal composites. J. Appl. Phys. 2000, 87, 3321–3331. [Google Scholar] [CrossRef]
- Khawwaf, J.; Zheng, J.; Lu, R.; Al-Ghanimi, A.; Kazem, B.I.; Man, Z. Robust tracking control of an IPMC actuator using nonsingular terminal sliding mode. Smart Mater. Struct. 2017, 26, 095042. [Google Scholar] [CrossRef]
- Aw, K.; McDaid, A. Bio-applications of ionic polymer metal composite transducers. Smart Mater. Struct. 2014, 23, 074005. [Google Scholar] [CrossRef]
- Santos, J.; Lopes, B.; Branco, P.C. Ionic polymer–metal composite material as a diaphragm for micropump devices. Sens. Actuators A Phys. 2010, 161, 225–233. [Google Scholar] [CrossRef]
- Yun, K.; Kim, W.J. System identification and microposition control of ionic polymer metal composite for three-finger gripper manipulation. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2006, 220, 539–551. [Google Scholar] [CrossRef]
- Konyo, M.; Konishi, Y.; Tadokoro, S.; Kishima, T. Development of velocity sensor using ionic polymer-metal composites. Int. Soc. Opt. Photonics 2004, 5385, 307–318. [Google Scholar]
- Brunetto, P.; Fortuna, L.; Giannone, P.; Graziani, S.; Pagano, F. A small scale viscometer based on an IPMC actuator and an IPMC sensor. In Proceedings of the 2010 IEEE Instrumentation & Measurement Technology Conference Proceedings, Austin, TX, USA, 3–6 May 2010; pp. 585–589. [Google Scholar]
- Keshavarzi, A.; Shahinpoor, M.; Kim, K.J.; Lantz, J.W. Blood pressure, pulse rate, and rhythm measurement using ionic polymer-metal composite sensors. Int. Soc. Opt. Photonics 1999, 3669, 369–376. [Google Scholar]
- Khawwaf, J.; Zheng, J.; Chai, R.; Lu, R.; Man, Z. Adaptive microtracking control for an underwater IPMC actuator using new hyperplane-based sliding mode. IEEE/ASME Trans. Mechatron. 2019, 24, 2108–2117. [Google Scholar] [CrossRef]
- Wang, J.; McDaid, A.J.; Lu, C.Z.; Aw, K.C. A compact ionic polymer-metal composite (IPMC) actuated valveless pump for drug delivery. IEEE/ASME Trans. Mechatron. 2016, 22, 196–205. [Google Scholar] [CrossRef]
- Hao, L.; Li, Z. Modeling and adaptive inverse control of hysteresis and creep in ionic polymer–metal composite actuators. Smart Mater. Struct. 2010, 19, 025014. [Google Scholar] [CrossRef]
- Richardson, R.C.; Levesley, M.C.; Brown, M.D.; Hawkes, J.A.; Watterson, K.; Walker, P.G. Control of ionic polymer metal composites. IEEE/ASME Trans. Mechatron. 2003, 8, 245–253. [Google Scholar] [CrossRef] [Green Version]
- Bhat, N.; Kim, W. Precision force and position control of an ionic polymer metal composite. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2004, 218, 421–432. [Google Scholar] [CrossRef]
- Bandopadhya, D.; Bhattacharya, B.; Dutta, A. Active vibration control strategy for a single-link flexible manipulator using ionic polymer metal composite. J. Intell. Mater. Syst. Struct. 2008, 19, 487–496. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, L.; Chen, W.; Li, Z.; Liu, L. A novel discrete adaptive sliding-mode-like control method for ionic polymer–metal composite manipulators. Smart Mater. Struct. 2013, 22, 095027. [Google Scholar] [CrossRef]
- Chen, X.; Su, C.Y. Adaptive control for ionic polymer-metal composite actuators. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1468–1477. [Google Scholar] [CrossRef]
- Peng, J.; Zawodzinski, T.A. Describing ion exchange membrane-electrolyte interactions for high electrolyte concentrations used in electrochemical reactors. J. Membr. Sci. 2020, 593, 117340. [Google Scholar] [CrossRef]
- Kamamichi, N.; Yamakita, M.; Asaka, K.; Luo, Z.W. A snake-like swimming robot using IPMC actuator/sensor. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA, Orlando, FL, USA, 15–19 May 2006; pp. 1812–1817. [Google Scholar]
- Su, C.Y.; Wang, Q.; Chen, X.; Rakheja, S. Adaptive variable structure control of a class of nonlinear systems with unknown Prandtl-Ishlinskii hysteresis. IEEE Trans. Autom. Control 2005, 50, 2069–2074. [Google Scholar]
- Vo, C.P.; Phan, V.D.; Nguyen, T.H.; Ahn, K.K. A compact adjustable stiffness rotary actuator based on linear springs: Working principle, design, and experimental verification. Actuators 2020, 9, 141. [Google Scholar] [CrossRef]
- Trinh, H.A.; Truong, H.V.A.; Ahn, K.K. Fault estimation and fault-tolerant control for the pump-controlled electrohydraulic system. Actuators 2020, 9, 132. [Google Scholar] [CrossRef]
- Zhou, Z.; Wu, B. Adaptive sliding mode control of manipulators based on fuzzy random vector function links for friction compensation. Optik 2020, 227, 166055. [Google Scholar] [CrossRef]
- Liaw, H.C.; Shirinzadeh, B.; Smith, J. Enhanced sliding mode motion tracking control of piezoelectric actuators. Sens. Actuators A Phys. 2007, 138, 194–202. [Google Scholar] [CrossRef]
- Hao, L.; Chen, Y.; Sun, Z. The sliding mode control for different shapes and dimensions of IPMC on resisting its creep characteristics. Smart Mater. Struct. 2015, 24, 045040. [Google Scholar] [CrossRef]
- Wang, X.; Alici, G.; Nguyen, C.H. Adaptive sliding mode control of tri-layer conjugated polymer actuators. Smart Mater. Struct. 2012, 22, 025004. [Google Scholar] [CrossRef]
- Di Gennaro, S.; Domínguez, J.R.; Meza, M.A. Sensorless high order sliding mode control of induction motors with core loss. IEEE Trans. Ind. Electron. 2013, 61, 2678–2689. [Google Scholar] [CrossRef]
- Gonzalez, T.; Moreno, J.A.; Fridman, L. Variable gain super-twisting sliding mode control. IEEE Trans. Autom. Control 2011, 57, 2100–2105. [Google Scholar] [CrossRef]
- Tseng, M.L.; Chen, M.S. Chattering reduction of sliding mode control by low-pass filtering the control signal. Asian J. Control 2010, 12, 392–398. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2010, 58, 600–610. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Huang, K.; Wang, H.; Man, Z.; Fu, M. Finite-time control of a linear motor positioner using adaptive recursive terminal sliding mode. IEEE Trans. Ind. Electron. 2019, 67, 6659–6668. [Google Scholar] [CrossRef]
- Tong, S.; Zhang, L.; Li, Y. Observed-based adaptive fuzzy decentralized tracking control for switched uncertain nonlinear large-scale systems with dead zones. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 37–47. [Google Scholar] [CrossRef]
- Wang, C.H.; Huang, D.Y. A new intelligent fuzzy controller for nonlinear hysteretic electronic throttle in modern intelligent automobiles. IEEE Trans. Ind. Electron. 2012, 60, 2332–2345. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q. Identification and compensation of piezoelectric hysteresis without modeling hysteresis inverse. IEEE Trans. Ind. Electron. 2012, 60, 3927–3937. [Google Scholar] [CrossRef]
- Tao, G.; Kokotovic, P.V. Adaptive control of plants with unknown hystereses. IEEE Trans. Autom. Control 1995, 40, 200–212. [Google Scholar] [CrossRef]
- Tan, X.; Baras, J.S. Modeling and control of hysteresis in magnetostrictive actuators. Automatica 2004, 40, 1469–1480. [Google Scholar] [CrossRef] [Green Version]
- Shao, K.; Zheng, J.; Wang, H.; Xu, F.; Liang, B. Recursive sliding mode control with adaptive disturbance observer for a linear motor positioner. Mech. Syst. Signal Process. 2020, 146. [Google Scholar] [CrossRef]
- Hong, Y.; Xu, Y.; Huang, J. Finite-time control for robot manipulators. Syst. Control Lett. 2002, 46, 243–253. [Google Scholar] [CrossRef]
- Deng, B.; Shao, K.; Zhao, H. Adaptive second order recursive terminal sliding mode control for a four-wheel independent steer-by-wire system. IEEE Access 2020, 8, 75936–75945. [Google Scholar] [CrossRef]
- Chiu, C.S. Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems. Automatica 2012, 48, 316–326. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Moulay, E.; Perruquetti, W. Finite time stability and stabilization of a class of continuous systems. J. Math. Anal. Appl. 2006, 323, 1430–1443. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Reference | Frequency (Hz) | Amplitude (mm) | Uncertainty |
|---|---|---|---|---|
| 1 | 0.02 | 0.05 | Without uncertainty | |
| 2 | 0.01 | 0.05 | Without uncertainty | |
| 3 | 0.01 | 0.1 | Without uncertainty | |
| 4 | 0.01 and 0.05 | 0.03 and 0.02 | Without uncertainty | |
| 5 | 0.02 | 0.05 | With uncertainty | |
| 6 | 0.01 | 0.05 | With uncertainty | |
| 7 | 0.01 | 0.1 | With uncertainty | |
| 8 | 0 | - | - | With disturbance |
| Test | Indices | NTSM (μm) | AFORTSM (μm) | Improvement (%) |
|---|---|---|---|---|
| 1 | MAX | 4.15 | 3.3 | 20 |
| RMS | 1.99 | 0.73 | 63 | |
| 2 | MAX | 7.61 | 6.1 | 19 |
| RMS | 2.98 | 1.06 | 64 | |
| 3 | MAX | 9.74 | 7.9 | 19 |
| RMS | 4.68 | 1.78 | 61 | |
| 4 | MAX | 7.32 | 5 | 31 |
| RMS | 2.0 | 1.38 | 31 | |
| 5 | MAX | 4.76 | 3.9 | 18 |
| RMS | 4.38 | 0.72 | 83 | |
| 6 | MAX | 13.84 | 6.6 | 52 |
| RMS | 8.52 | 1.4 | 83 | |
| 7 | MAX | 11.84 | 6.1 | 48 |
| RMS | 4.85 | 1.56 | 67 | |
| 8 | MAX | 32.45 | 12 | 63 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ekbatani, R.Z.; Shao, K.; Khawwaf, J.; Wang, H.; Zheng, J.; Chen, X.; Nikzad, M. Control of an IPMC Soft Actuator Using Adaptive Full-Order Recursive Terminal Sliding Mode. Actuators 2021, 10, 33. https://doi.org/10.3390/act10020033
Ekbatani RZ, Shao K, Khawwaf J, Wang H, Zheng J, Chen X, Nikzad M. Control of an IPMC Soft Actuator Using Adaptive Full-Order Recursive Terminal Sliding Mode. Actuators. 2021; 10(2):33. https://doi.org/10.3390/act10020033
Chicago/Turabian StyleEkbatani, Romina Zarrabi, Ke Shao, Jasim Khawwaf, Hai Wang, Jinchuan Zheng, Xiaoqi Chen, and Mostafa Nikzad. 2021. "Control of an IPMC Soft Actuator Using Adaptive Full-Order Recursive Terminal Sliding Mode" Actuators 10, no. 2: 33. https://doi.org/10.3390/act10020033
APA StyleEkbatani, R. Z., Shao, K., Khawwaf, J., Wang, H., Zheng, J., Chen, X., & Nikzad, M. (2021). Control of an IPMC Soft Actuator Using Adaptive Full-Order Recursive Terminal Sliding Mode. Actuators, 10(2), 33. https://doi.org/10.3390/act10020033