
Flywheel-Based Boom Energy Recovery System for Hydraulic Excavators with Load Sensing System


Abstract
:1. Introduction
2. System Configurations
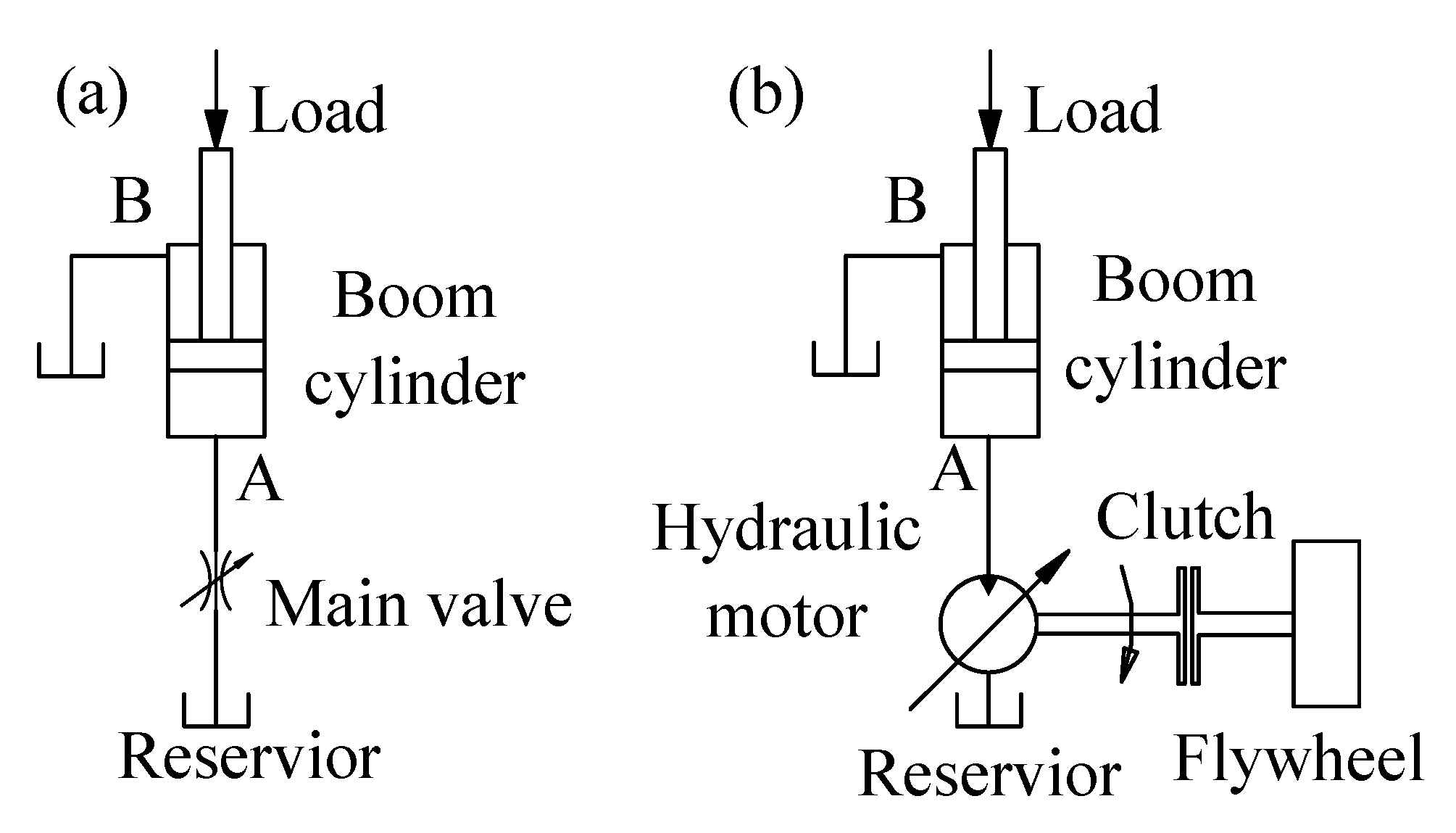
2.1. Original Boom Driving System
2.2. Load Sensing System with a Flywheel-Based ERS
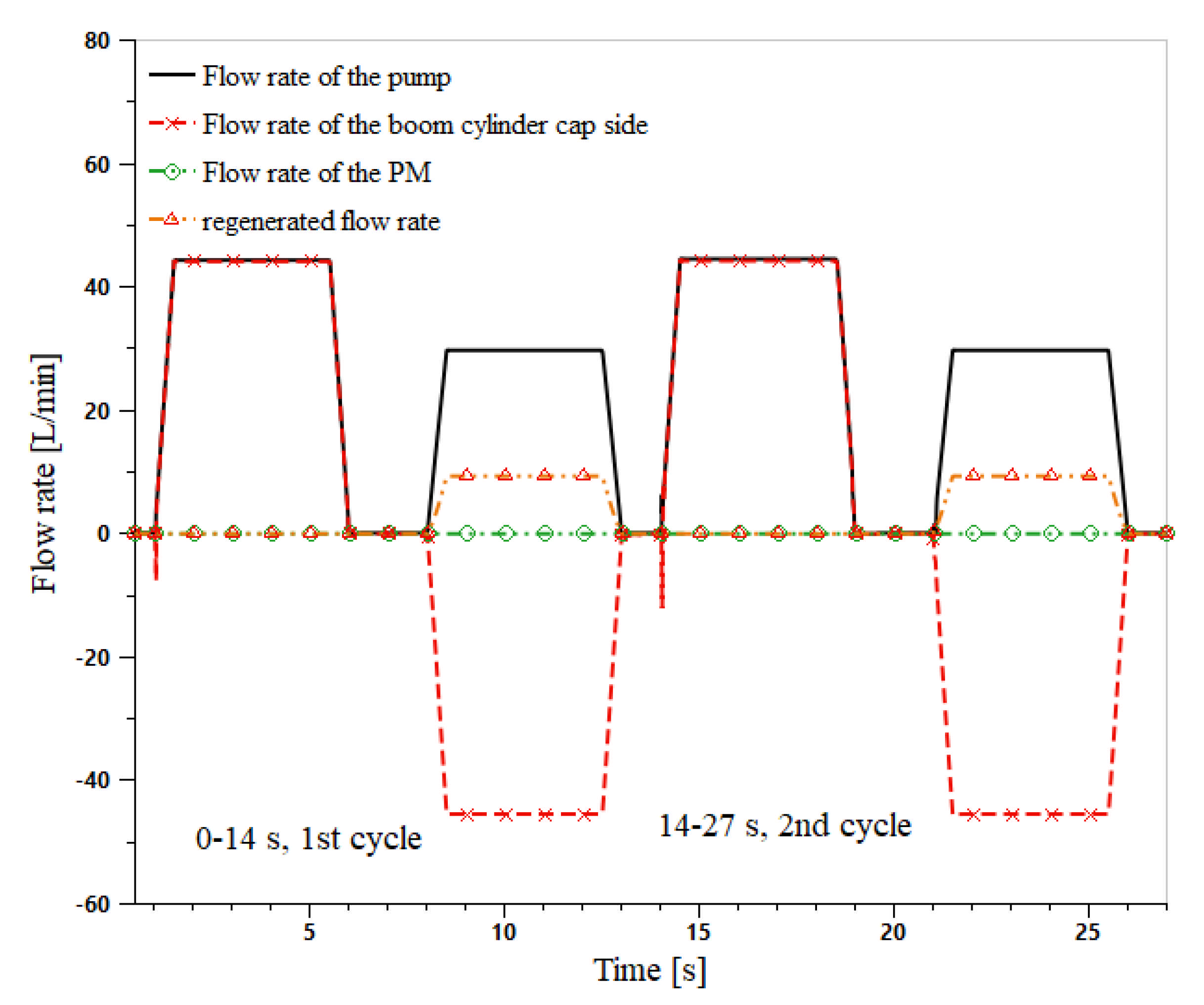
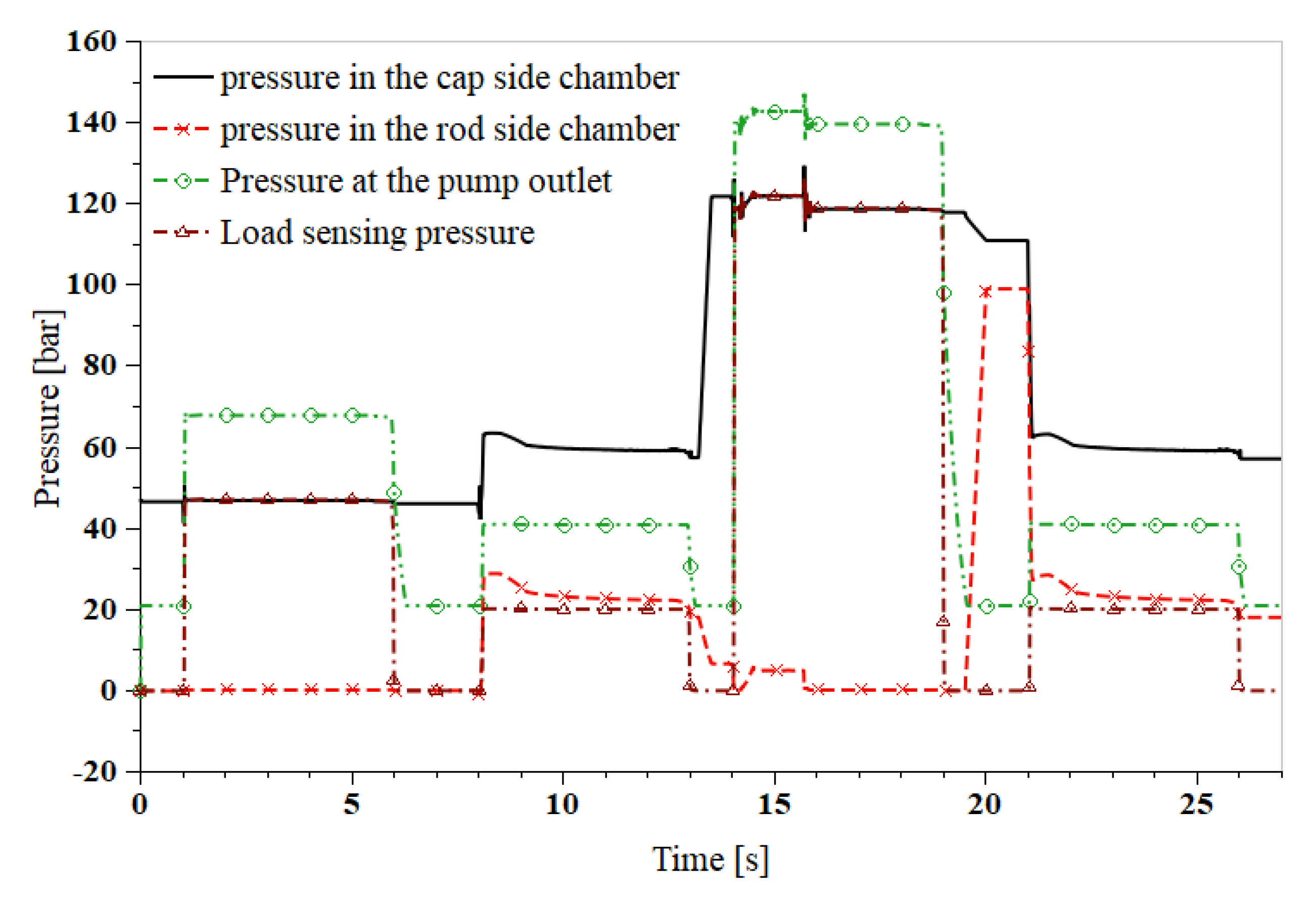
- Recovery mode. Because of the gravity force of the working device, the pressure in the cap side of the boom cylinder is higher than that in the rod side chamber. When the boom cylinder moves down, the pump delivers fluid to the rod side of the boom cylinder. The regeneration valve is energized, the fluid discharged from the cap side of the boom cylinder flows through the regeneration valve and the PM and back to the reservoir. The PM works in motoring mode and converts pressure energy into mechanical energy to accelerate the flywheel.
- Reutilization mode. When the boom is moving up, the main valve distributes the fluid provided by the pump to the cap side of the boom cylinder. At the same time, the clutch is energized, and the flywheel drives the PM pump fluid from the reservoir to the cap side of the boom cylinder. With the consumption of energy, the speed of the flywheel decreases gradually. Thus, the recaptured energy is used to drive the boom cylinder up.
- Standby mode. When the boom is standstill, the system works in standby mode. All valves and the clutch are de-energized, and the flywheel keeps spinning. The flywheel will gradually slow down due to parasitic energy loss.
3. Mathematical Modeling
3.1. Mathematical Model of the Conventional System
3.2. Mathematical Model of the Proposed System
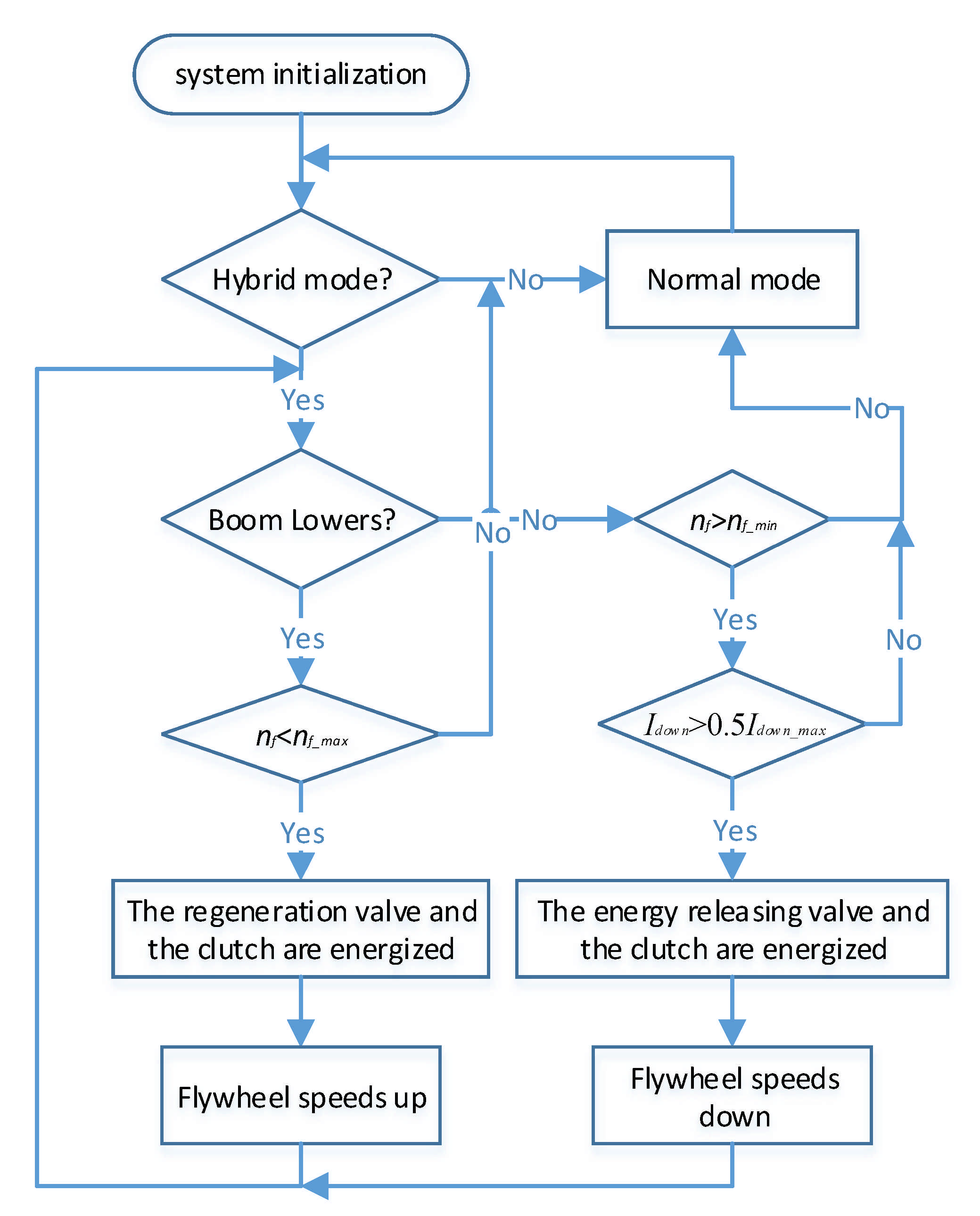
4. Control Strategy
5. Simulation and Discussion
5.1. Simulation Model
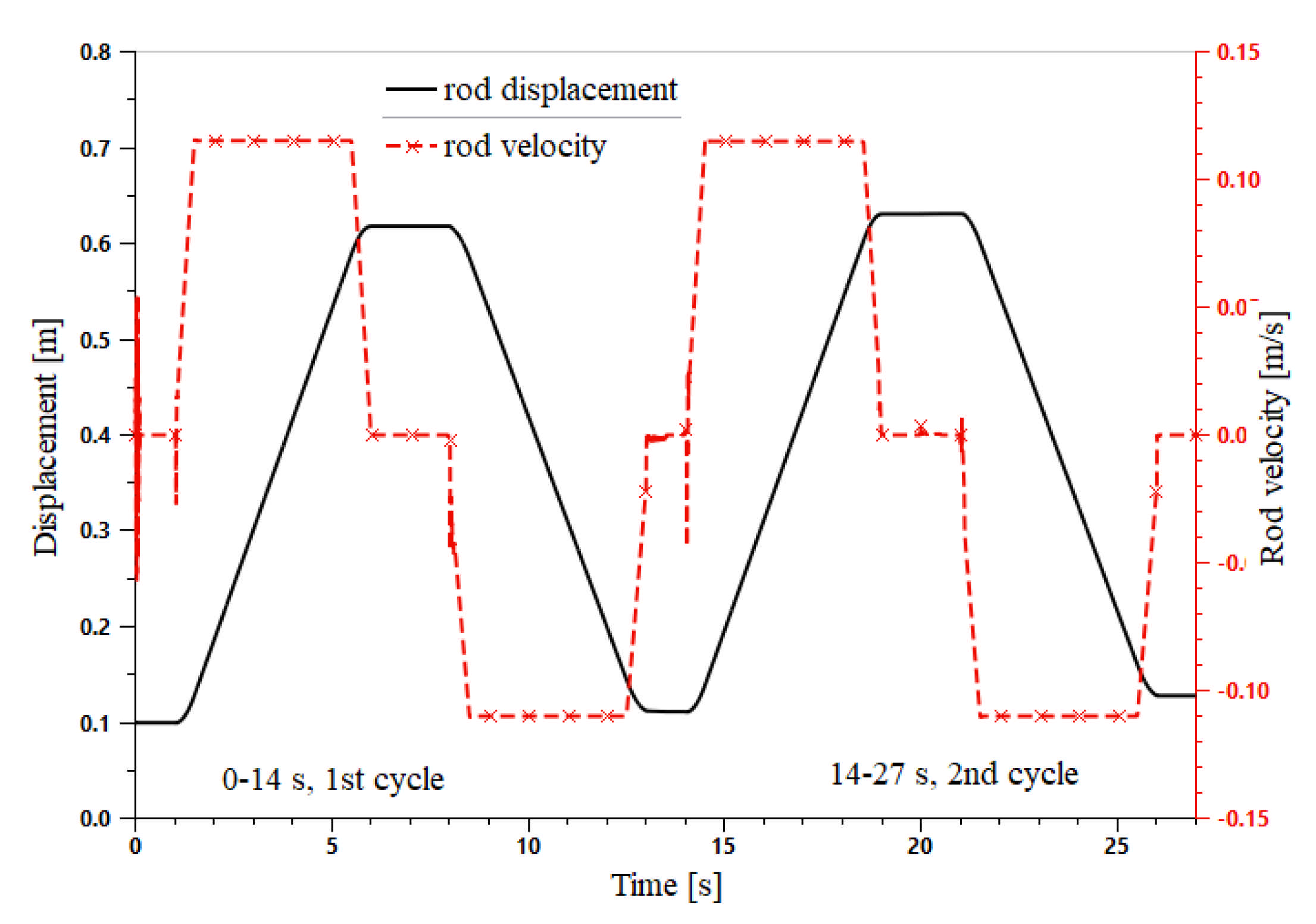
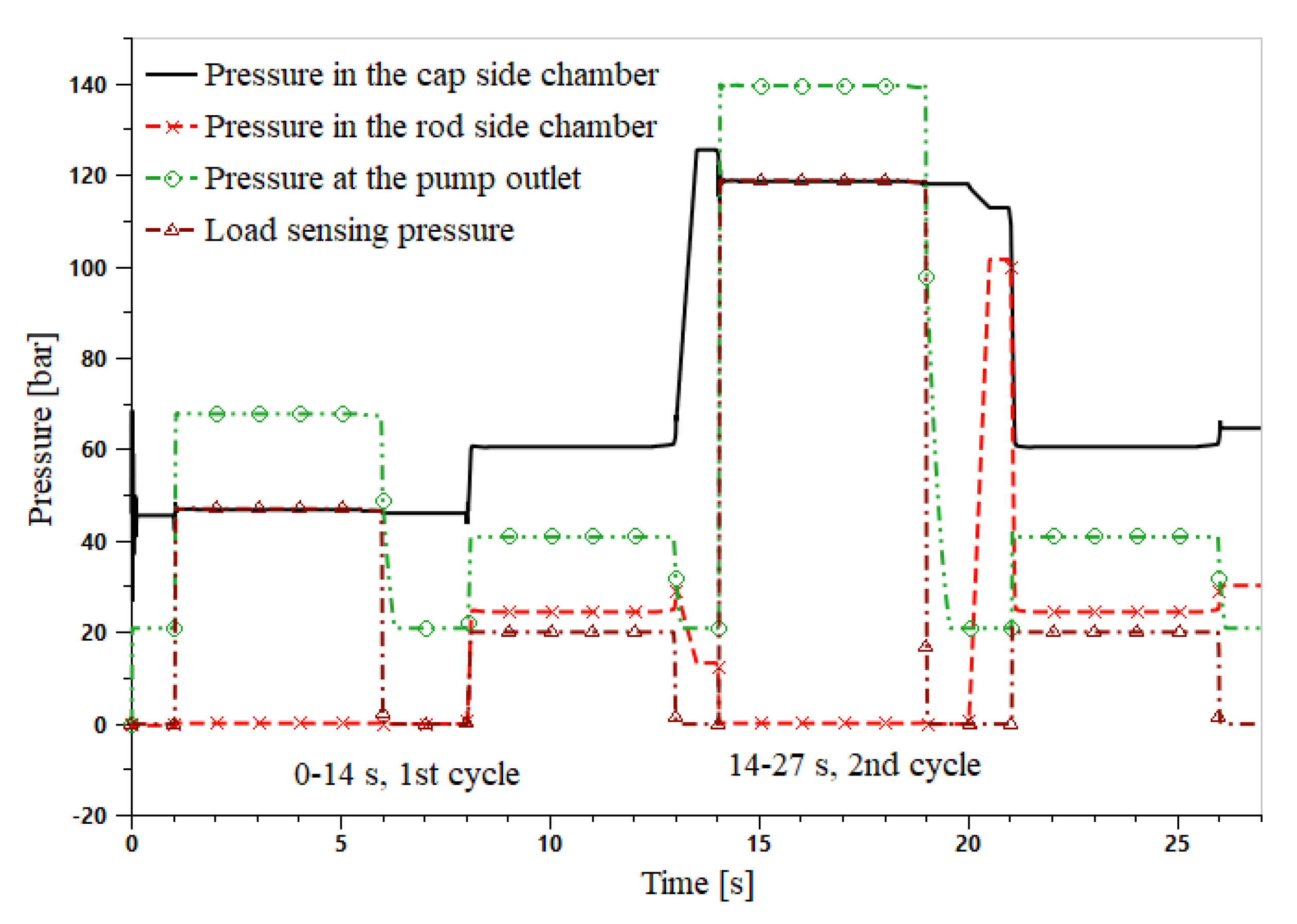
5.2. Simulation Results and Discussionto Validate the Energy Reutilization Effect under Different Load Conditions, Two Working Cycles Were Simulated Based on Figure 7
5.2.1. The Baseline-Conventional LS System
5.2.2. The Proposed System with No Load
5.2.3. The Proposed System with a Fully Loaded Bucket
5.2.4. Comparison with Other Research and Discussion
6. Conclusions
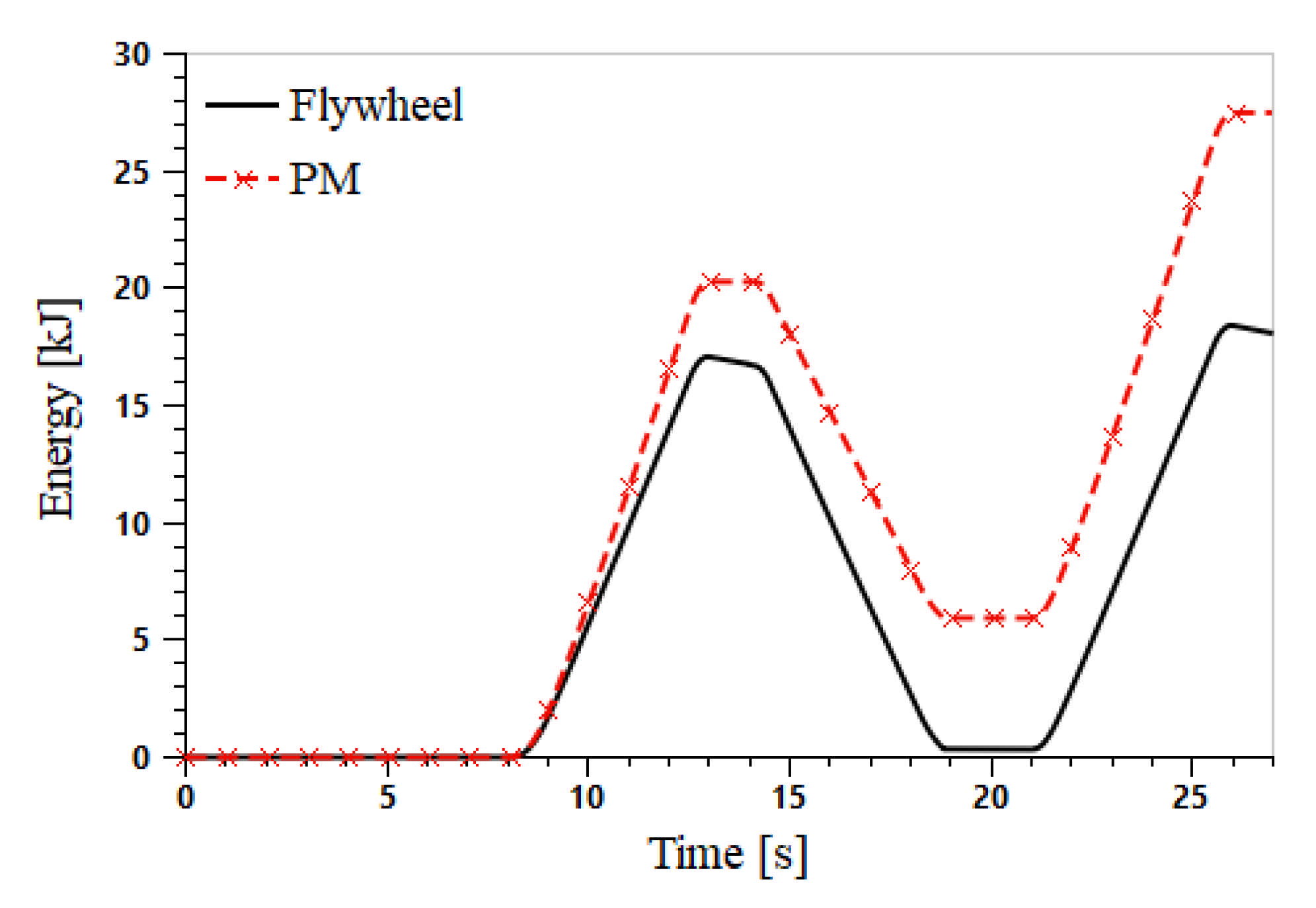
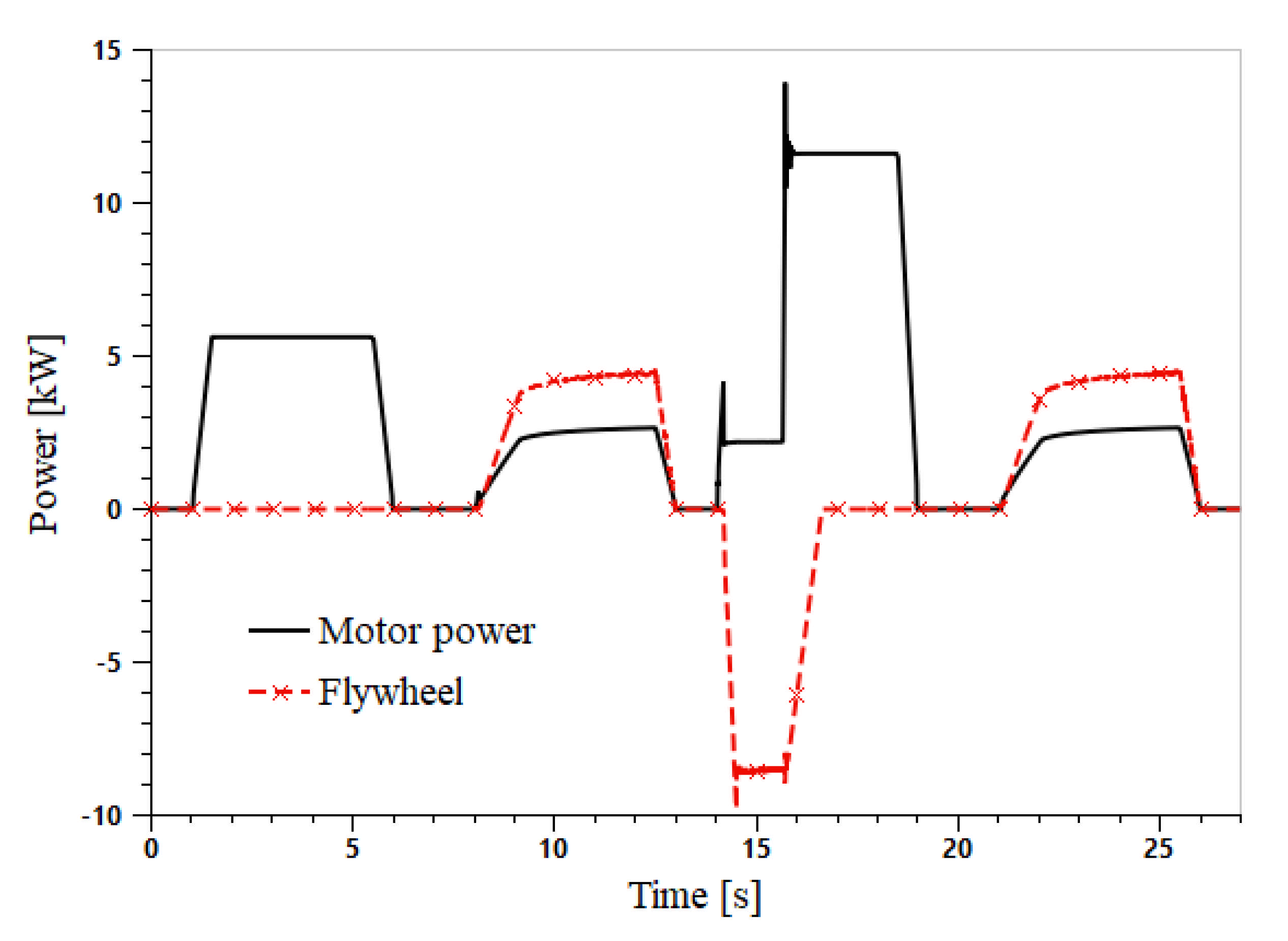
- A new LS system with a flywheel-based ERS is proposed and analyzed. A hydraulic PM is employed in this system as a converter, and a flywheel is used as an energy storage device. The PM converts the pressure energy in the boom cylinder into kinetic energy to accelerate the flywheel when the boom moves down. The recaptured energy is reutilized by pumping fluid to the boom cylinder when the boom goes up. This reduces the power demand of the original engine.
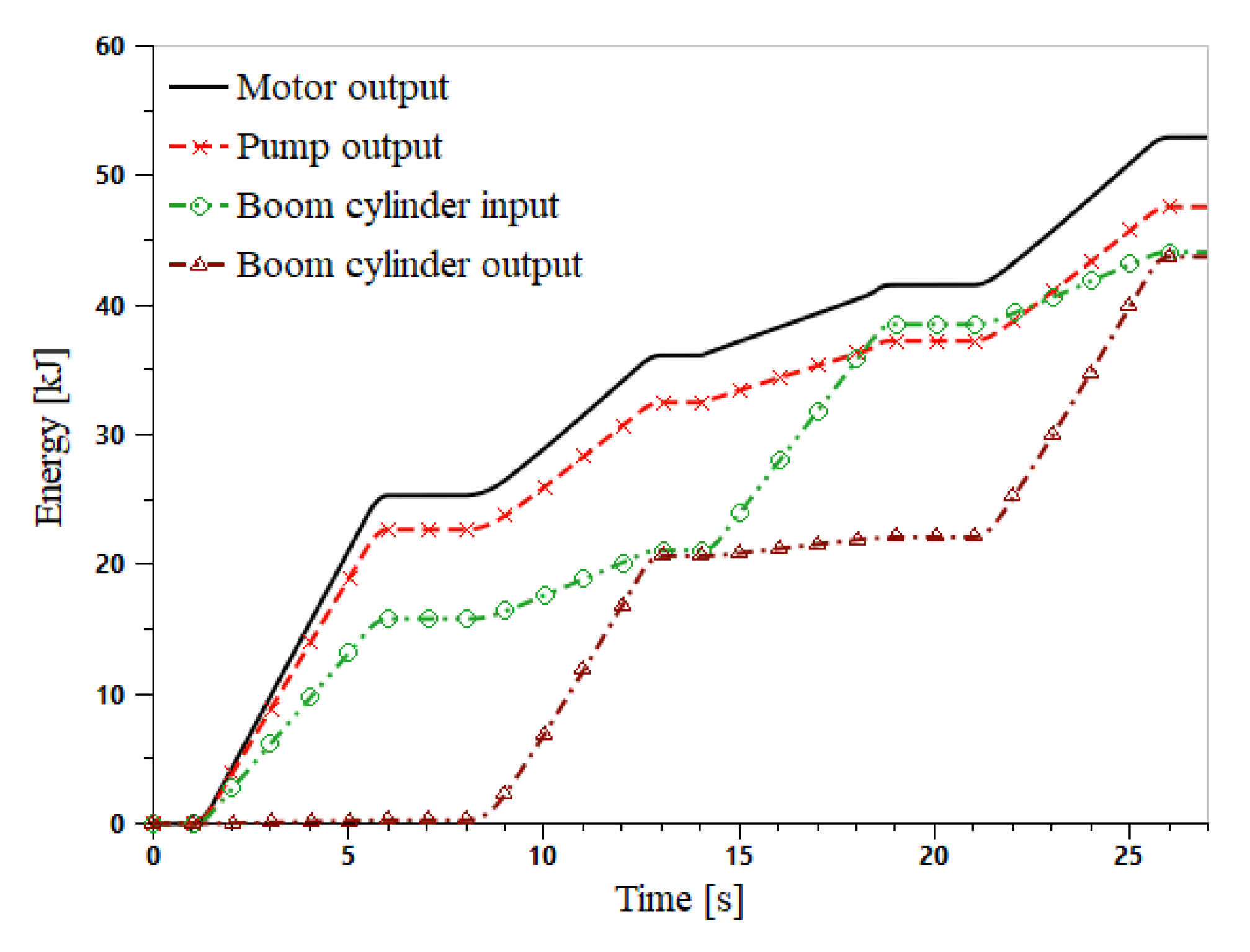
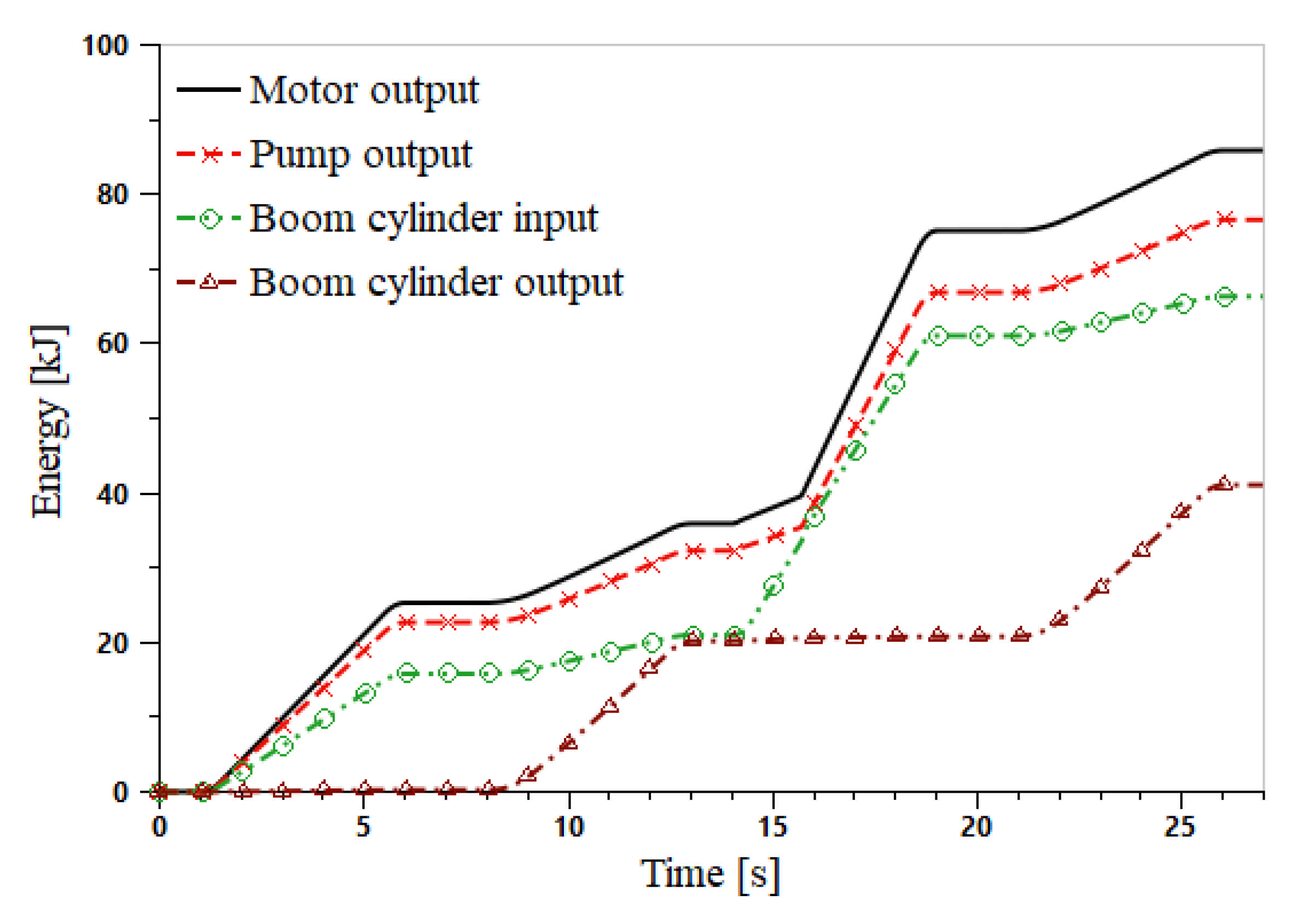
- AMESim software is used to model the proposed system and to investigate the energy-saving effect. Simulation results show that, in a non-loaded cycle of boom lifting and lowering process, the proposed system reduces as much as 48.9% energy consumption compared with an LS system without an ERS. However, in fully-loaded cases, the energy-saving rate decreases to 16.9%. More energy is needed to lift the load, and the recovered energy is almost constant, so the energy-saving rate decreases. This is the main reason. The change of working area is another reason for this.
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, S.; Jiang, J.; Lian, G. Research on recoverable energy distribution of hydraulic excavator. J. Zhengzhou Univ. 2014, 35, 120–124. [Google Scholar] [CrossRef]
- Do, T.C.; Dang, T.D.; Dinh, T.Q.; Ahn, K.K. Developments in energy regeneration technologies for hydraulic excavators: A review. Renew. Sustain. Energy Rev. 2021, 145, 111076. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q. Efficiency analysis and evaluation of energy-saving pressure-compensated circuit for hybrid hydraulic excavator. Autom. Constr. 2014, 47, 62–68. [Google Scholar] [CrossRef]
- Lin, T.; Wang, Q.; Hu, B.; Wen, G. Research on the energy regeneration systems for hybrid hydraulic excavators. Autom. Constr. 2010, 19, 1016–1026. [Google Scholar] [CrossRef]
- Lin, T.; Wang, Q. Hydraulic accumulator-motor-generator energy regeneration system for a hybrid hydraulic excavator. Chin. J. Mech. Eng. 2012, 25, 1121–1129. [Google Scholar] [CrossRef]
- Yu, Y.; Ahn, K.K. Optimization of energy regeneration of hybrid hydraulic excavator boom system. Energy Convers. Manag. 2019, 183, 26–34. [Google Scholar] [CrossRef]
- Do, T.C.; Nguyen, D.G.; Dang, T.D.; Ahn, K.K. A Boom Energy Regeneration System of Hybrid Hydraulic Excavator Using Energy Conversion Components. Actuators 2021, 10, 1. [Google Scholar] [CrossRef]
- Hao, Y.; Quan, L.; Cheng, H.; Xia, L.; Ge, L.; Zhao, B. Potential energy directly conversion and utilization methods used for heavy duty lifting machinery. Energy 2018, 155, 242–251. [Google Scholar] [CrossRef]
- Xia, L.; Quan, L.; Ge, L.; Hao, Y. Energy efficiency analysis of integrated drive and energy recuperation system for hydraulic excavator boom. Energy Convers. Manag. 2018, 156, 680–687. [Google Scholar] [CrossRef]
- Li, Z.; Wang, C.; Quan, L.; Hao, Y.; Ge, L.; Xia, L. Study on energy efficiency characteristics of the heavy-duty manipulator driven by electro-hydraulic hybrid active-passive system. Autom. Constr. 2021, 125, 103646. [Google Scholar] [CrossRef]
- Joo, C.; Stangl, M. Application of Power Regenerative Boom system to excavator. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 175–184. Available online: https://tud.qucosa.de/api/qucosa%3A29389/attachment/ATT-0/ (accessed on 8 June 2021).
- Casoli, P.; Gambarotta, A.; Pompini, N.; Riccò, L. Hybridization methodology based on DP algorithm for hydraulic mobile machinery—Application to a middle size excavator. Autom. Constr. 2016, 61, 42–57. [Google Scholar] [CrossRef]
- Bui, N.M.T.; Dinh, Q.T.; Lee, S.Y.; Lee, S.Y.; Ahn, K.K. Study on energy regeneration system for hybrid hydraulic excavator. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics, Harbin, China, 5–7 August 2015; pp. 1349–1354. [Google Scholar] [CrossRef]
- Vukovic, M.; Leifeld, R. STEAM-a hydraulic hybrid architecture for excavators. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 151–162. Available online: https://core.ac.uk/reader/236373201 (accessed on 18 September 2020).
- Ge, L.; Quan, L.; Li, Y.; Zhang, X.; Yang, J. A novel hydraulic excavator boom driving system with high efficiency and potential energy regeneration capability. Energy Convers. Manag. 2018, 166, 308–317. [Google Scholar] [CrossRef]
- Shen, W.; Jiang, J.; Su, X.; Karimi, H.R. Energy-saving analysis of hydraulic hybrid excavator based on common pressure rail. Sci. World J. 2013, 2013, 560694. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, Z.; Hua, L.; Zhao, X. Analysis of energy characteristic and working performance of novel controllable hydraulic accumulator with simulation and experimental methods. Energy Convers. Manag. 2020, 221, 113196. [Google Scholar] [CrossRef]
- Wasbari, F.; Bakar, R.A.; Gan, L.M.; Tahir, M.M.; Yusof, A.A. A review of compressed-air hybrid technology in vehicle system. Renew. Sustain. Energy Rev. 2017, 67, 935–953. [Google Scholar] [CrossRef] [Green Version]
- Tianliang, L.; Qiang, C.; Haoling, R.; Weiping, H.; Qihuai, C.; Shengjie, F. Boom energy recovery system with auxiliary throttle based on hybrid excavator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 231, 4250–4262. [Google Scholar] [CrossRef]
- Hedlund, M.; Lundin, J.; de Santiago, J.; Abrahamsson, J.; Bernhoff, H. Flywheel Energy Storage for Automotive Applications. Energies 2015, 8, 10636–10663. [Google Scholar] [CrossRef] [Green Version]
- DHand, A.; PULLEN, K. Review of Battery Electric Vehicle Propulsion Systems incorporating Flywheel Energy Storage. Int. J. Automot. Technol. 2015, 16, 487–500. [Google Scholar] [CrossRef] [Green Version]
- Ricardo. Ricardo to Showcase ‘TorqStor’ High Efficiency Flywheel Energy Storage at CONEXPO. Available online: https://ricardo.com/news-and-media/news-and-press/ricardo-to-showcase-%E2%80%98torqstor%E2%80%99-high-efficiency-fly (accessed on 4 December 2019).
- Li, J.; Zhao, J.; Zhang, X. A Novel Energy Recovery System Integrating Flywheel and Flow Regeneration for a Hydraulic Excavator Boom System. Energies 2020, 13, 315. [Google Scholar] [CrossRef] [Green Version]
- Mahato, A.C.; Ghoshal, S.K. An Overview of Energy Savings Approaches on Hydraulic Drive Systems. Int. J. Fluid Power 2020, 21, 81–118. [Google Scholar] [CrossRef]
- Bedotti, A.; Campanini, F.; Pastori, M.; Riccò, L.; Casoli, P. Energy saving solutions for a hydraulic excavator. Energy Procedia 2017, 126, 1099–1106. [Google Scholar] [CrossRef]
- Kwon, H.; Ivantysynova, M. System Characteristics Analysis for Energy Management of Power-Split Hydraulic Hybrids. Energies 2020, 13, 1837. [Google Scholar] [CrossRef] [Green Version]
- Gong, J.; Zhang, D.; Liu, C.; Zhao, Y.; Hu, P.; Quan, W. Optimization of electro-hydraulic energy-savings in mobile machinery. Autom. Constr. 2019, 98, 132–145. [Google Scholar] [CrossRef]
- Chen, Q.; Lin, T.; Ren, H.; Fu, S. Novel potential energy regeneration systems for hybrid hydraulic excavators. Math. Comput. Simul. 2019, 163, 130–145. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q. Design and analysis of compound potential energy regeneration system for hybrid hydraulic excavator. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2012, 226, 1323–1334. [Google Scholar] [CrossRef]
- Buchroithner, A.; Wegleiter, H. Flywheel Energy Storage Systems Compared to Competing Technologies for Grid Load Mitigation in EV Fast-Charging Applications. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, Australia, 13–15 June 2018; pp. 508–514. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameters | Value |
|---|---|---|
| LS Pump | Hydro-mechanical efficiency | 0.93 |
| Volumetric efficiency | 0.96 | |
| Maximum displacement (ml/rev) | 45 | |
| Pressure difference set by the flow compensator (bar) | 20 | |
| Maximum pressure set by the pressure compensator (bar) | 280 | |
| Pump/motor | Efficiency | see Figure 6 |
| Maximum displacement (ml/rev) | 71 | |
| Boom cylinder | Piston diameter (mm) | 90 |
| Rod diameter (mm) | 53 | |
| Stroke (m) | 0.6 | |
| Initial displacement | 0.1 | |
| Viscous friction coefficient [N/(m/s)] | 800 | |
| Stiction force (N) | 600 | |
| Coulomb friction force (N) | 600 | |
| Flywheel | Moment of inertia (kg·m2) | 1.03 |
| Viscous damping coefficient [N·m/(rev/min)] | 0.001 |
| Load of the Excavator Bucket | Motor Energy | Original System/kJ | Proposed System/kJ | Energy-Saving Rate/% |
|---|---|---|---|---|
| Null (empty bucket) | Needed to lift boom | 25.3 | 6.4 | 74.7 |
| Needed in one cycle | 32.9 | 16.8 | 48.9 | |
| Fully loaded (full bucket) | needed to lift boom | 52.6 | 39.3 | 25.3 |
| Needed in one cycle | 60.2 | 50.0 | 16.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Han, Y.; Li, S. Flywheel-Based Boom Energy Recovery System for Hydraulic Excavators with Load Sensing System. Actuators 2021, 10, 126. https://doi.org/10.3390/act10060126
Li J, Han Y, Li S. Flywheel-Based Boom Energy Recovery System for Hydraulic Excavators with Load Sensing System. Actuators. 2021; 10(6):126. https://doi.org/10.3390/act10060126
Chicago/Turabian StyleLi, Jiansong, Yu Han, and Shaohui Li. 2021. "Flywheel-Based Boom Energy Recovery System for Hydraulic Excavators with Load Sensing System" Actuators 10, no. 6: 126. https://doi.org/10.3390/act10060126
APA StyleLi, J., Han, Y., & Li, S. (2021). Flywheel-Based Boom Energy Recovery System for Hydraulic Excavators with Load Sensing System. Actuators, 10(6), 126. https://doi.org/10.3390/act10060126