
Dynamic Analysis of Intermittent-Motion Conveyor Actuator

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
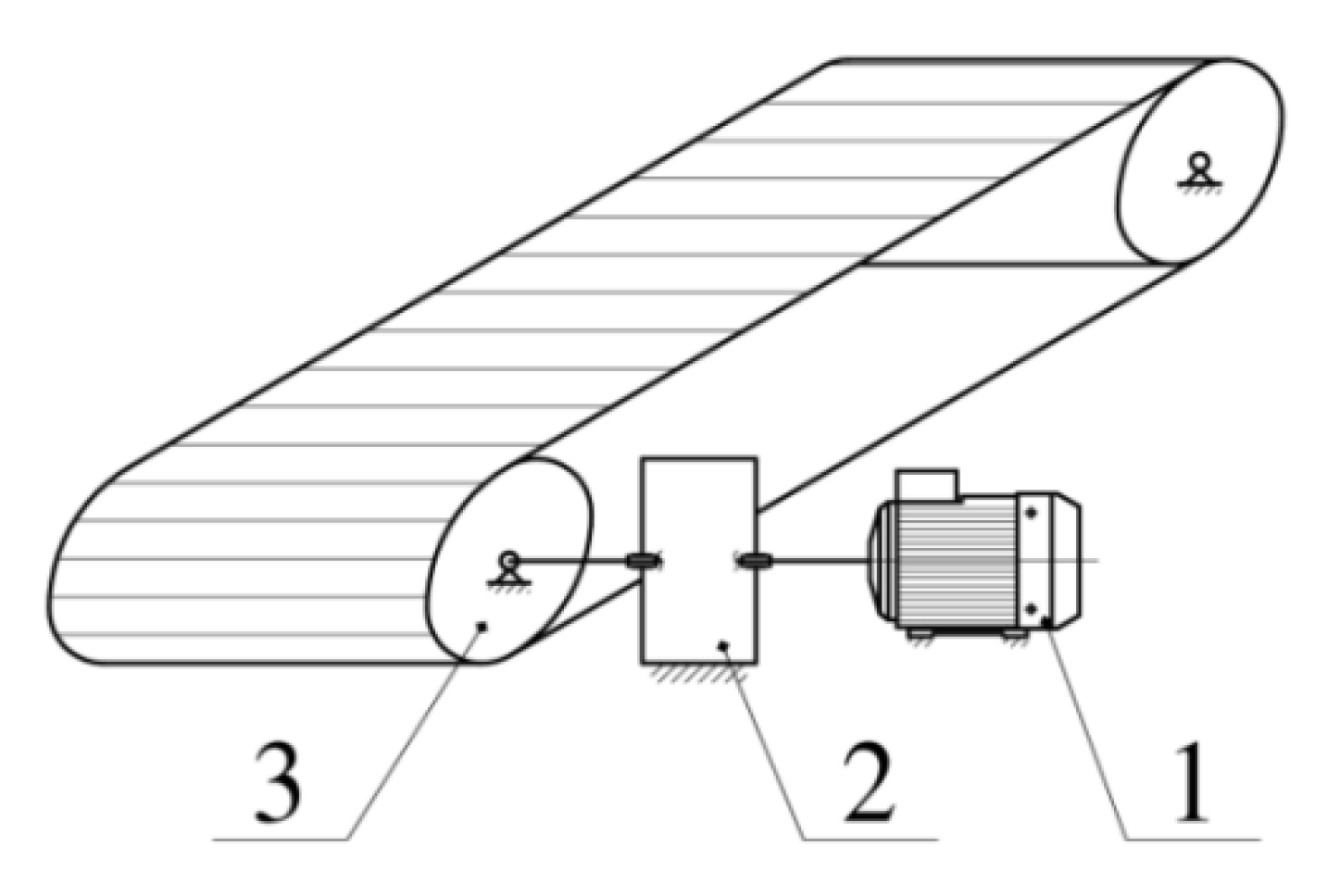
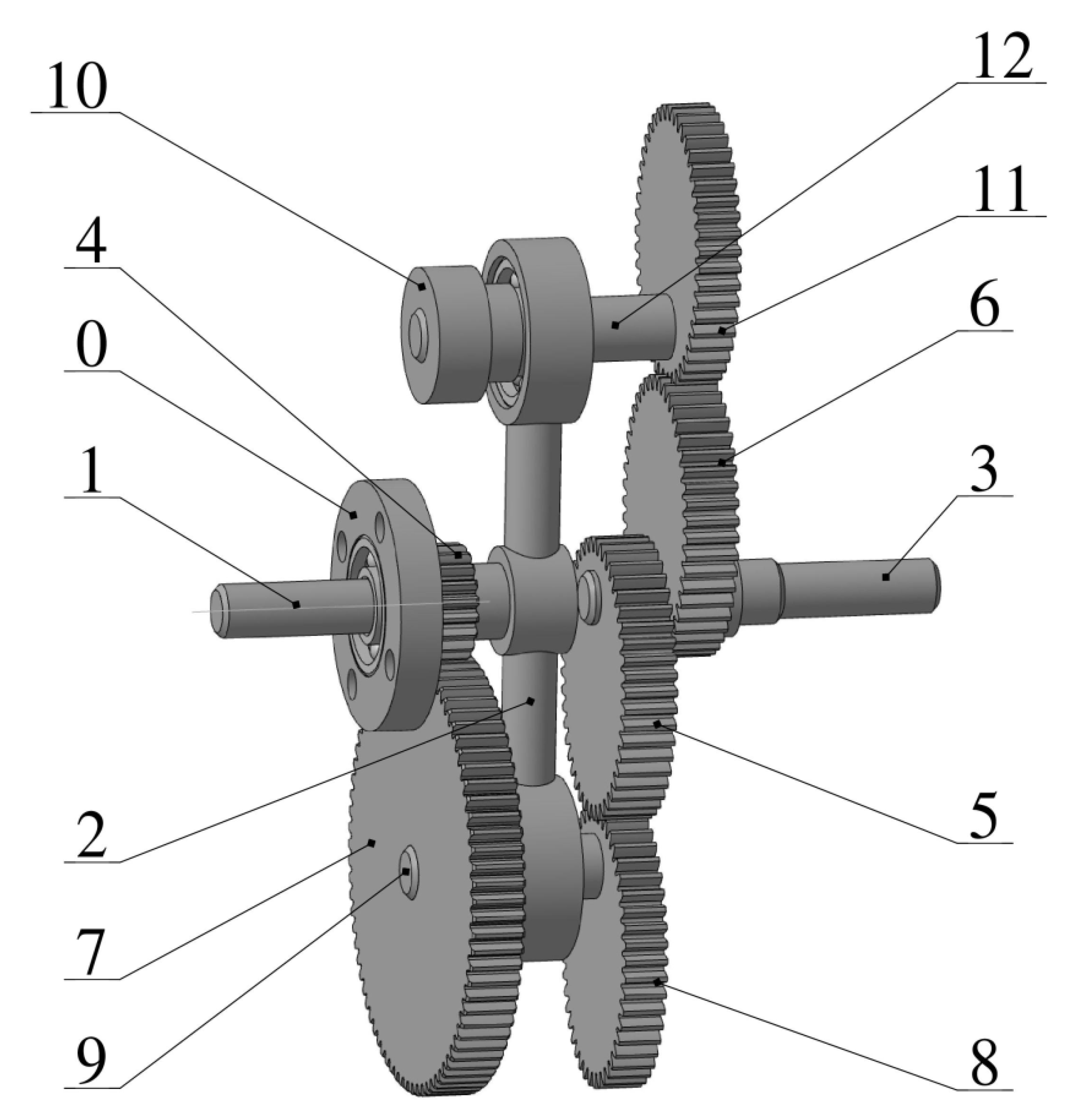
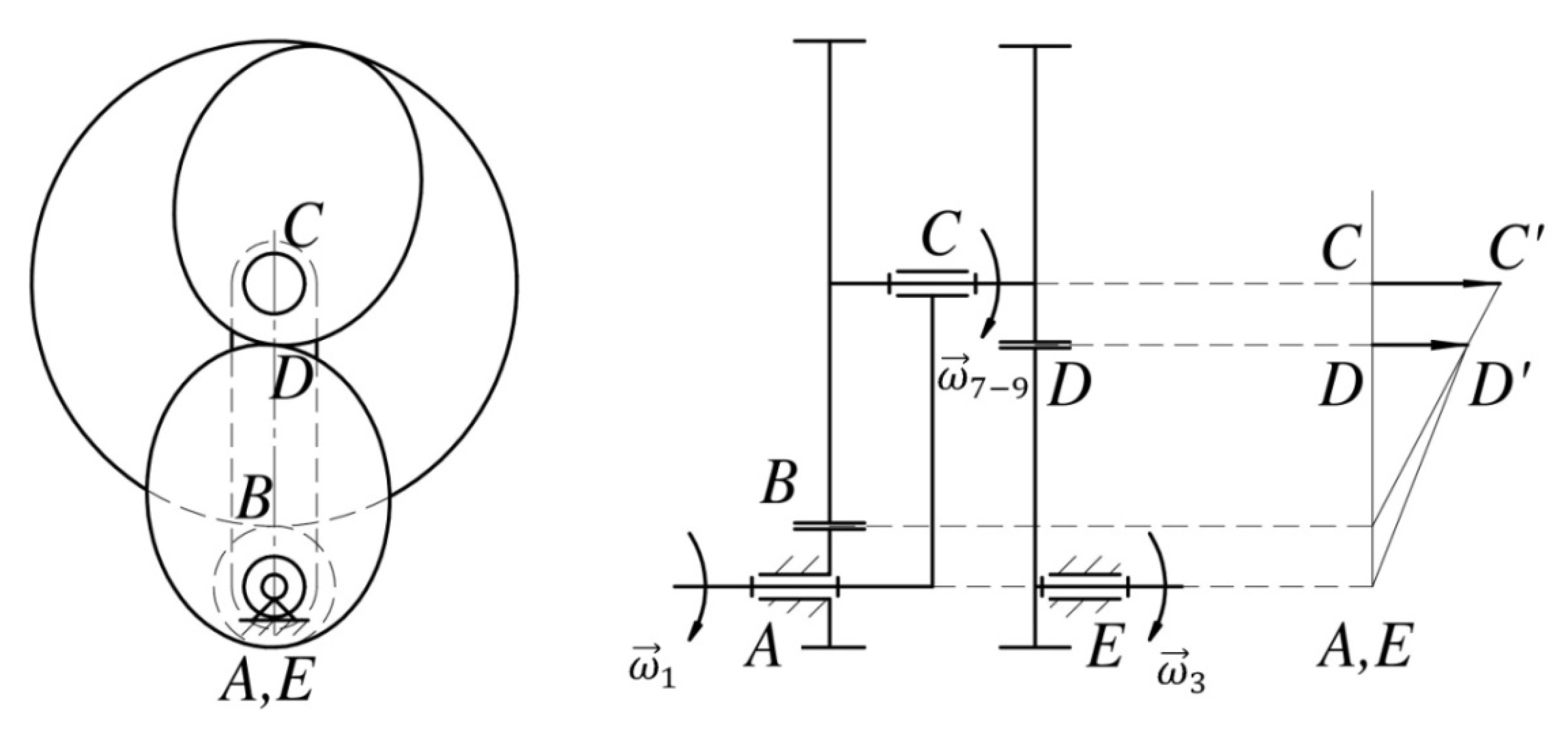
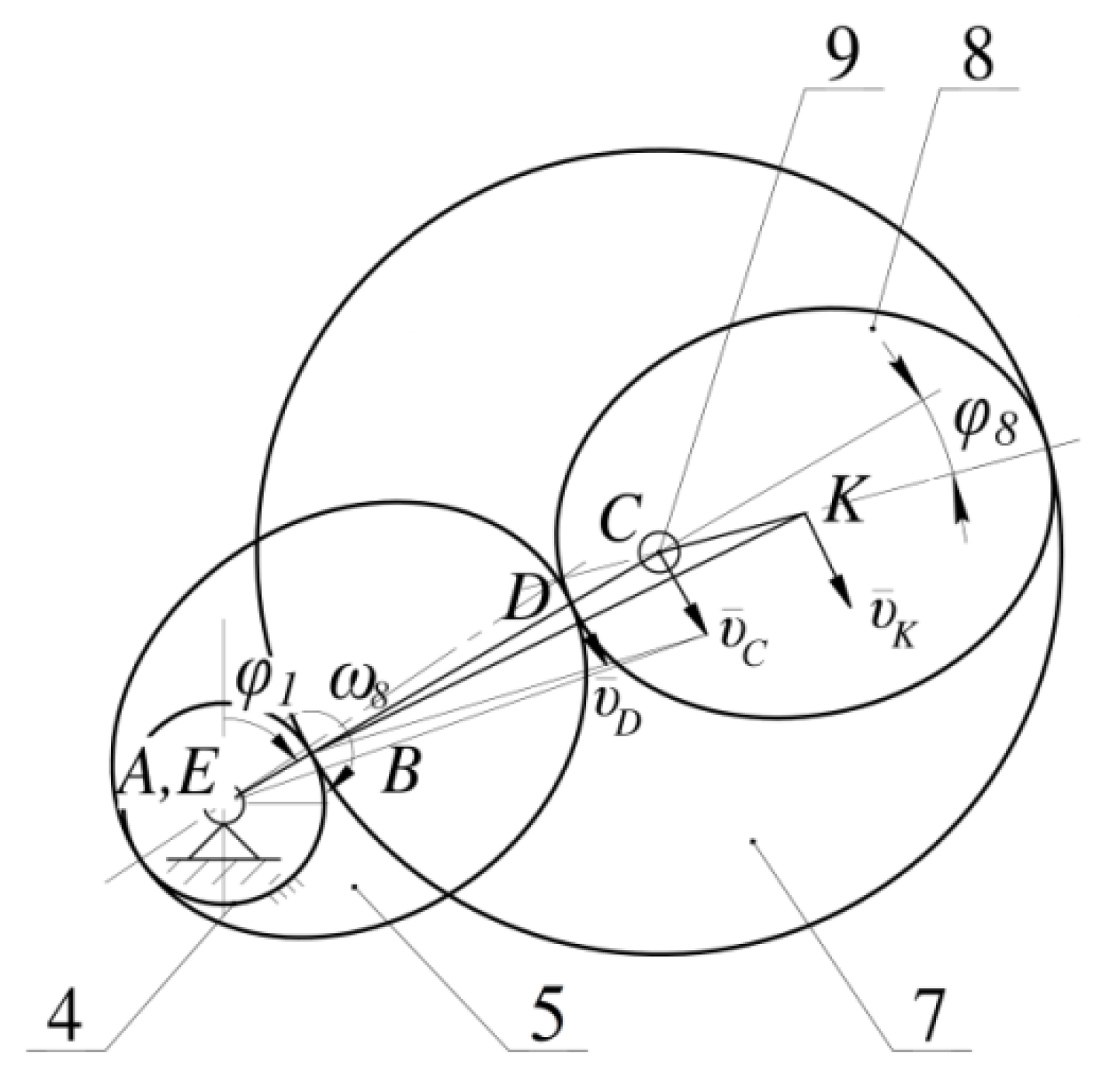
2. Description of the Conveyor Actuator Mechanical System and Problem Statement
3. Description and Construction of a Dynamic Model
3.1. Reduced Inertia Moment
3.2. Reduced Moment of Resistance Forces
3.3. Initial Parameters for Dynamic Analysis
4. Numerical Modeling Results
5. Conclusions
- laws of motion of the reduction link (the input shaft of the mechanism) are obtained using the energy-mass method and the third-order Hermite interpolation function;
- analysis of the input link rotation irregularity is carried out;
- moment of inertia of the flywheel to reduce the irregularity coefficient is determined.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yao, Y.; Zhang, B. Influence of the elastic modulus of a conveyor belt on the power allocation of multi-drive conveyors. PLoS ONE 2020, 15, e0235768. [Google Scholar] [CrossRef] [PubMed]
- Gao, R.; Miao, C.; Li, X. Adaptive multi-view image mosaic method for conveyor belt surface fault online detection. Appl. Sci. 2021, 11, 2564. [Google Scholar] [CrossRef]
- Friso, D. Conveyor-belt dryers with tangential flow for food drying: Development of drying Odes useful to design and process adjustment. Inventions 2021, 6, 6. [Google Scholar] [CrossRef]
- Dong, M.W.; Luo, Q. Research and application on energy saving of port belt conveyor. Procedia Environ. Sci. 2011, 10, 32–38. [Google Scholar] [CrossRef] [Green Version]
- He, D.J.; Pang, Y.S.; Lodenijks, G. Green operations of belt conveyors by means of speed control. Appl. Energy 2017, 188, 330–341. [Google Scholar] [CrossRef]
- Zimroz, R.; Krol, R. Failure analysis of belt conveyor systems for condition monitoring purposes. Arch.Min. Sci. 2009, 128, 255–270. [Google Scholar]
- Andrejiova, M.; Grincova, A.; Marasova, D. Monitoring dynamic loading of conveyer belts by measuring local peak impact forces. Measurement 2020, 158, 107690. [Google Scholar] [CrossRef]
- Draganová, K.; Semrád, K.; Spodniak, M.; Cúttová, M. Innovative analysis of the physical-mechanical properties of airport conveyor belts. Transp. Res. Procedia 2020, 51, 20–27. [Google Scholar] [CrossRef]
- Bajda, M.; Hardygóra, M. Analysis of reasons for reduced strength of multiply conveyor belt splices. Energies 2021, 14, 1512. [Google Scholar] [CrossRef]
- Trybała, P.; Blachowski, J.; Błazej, R.; Zimroz, R. Damage detection based on 3D point cloud data processing from laser scanning of conveyor belt surface. Remote Sens. 2021, 13, 55. [Google Scholar] [CrossRef]
- Skoczylas, A.; Stefaniak, P.; Anufriiev, S.; Jachnik, B. Belt conveyors rollers diagnostics based on acoustic signal collected using autonomous legged inspection robot. Appl. Sci. 2021, 11, 2299. [Google Scholar] [CrossRef]
- Gao, Y.; Qiao, T.; Zhang, H.; Yang, Y.; Pang, Y.; Wei, H. A contactless measuring speed system of belt conveyor based on machine vision and machine learning. Measurement 2019, 139, 127–133. [Google Scholar] [CrossRef]
- Hou, C.; Qiao, T.; Zhang, H.; Pang, Y.; Xiong, X. Multispectral visual detection method for conveyor belt longitudinal tear. Measurement 2019, 143, 246–257. [Google Scholar] [CrossRef]
- Zhang, M.; Zhou, M.; Shi, H. A computer vision-based real-time load perception method for belt conveyors. Math. Probl. Eng. 2020, 2020, 8816388. [Google Scholar] [CrossRef]
- Che, J.; Qiao, T.; Yang, Y.; Zhang, H.; Pang, Y. Longitudinal tear detection method of conveyor belt based on audio-visual fusion. Measurement 2021, 176, 109152. [Google Scholar] [CrossRef]
- Wodecki, J.; Zdunek, R.; Wyomańska, A.; Zimroz, R. Local fault detection of rolling element bearing components by spectrogram clustering with semi-binary NMF. Diagnostyka 2017, 18, 3–8. [Google Scholar]
- Wodecki, J.; Michalak, A.; Zimroz, R.; Wyłomanska, A. Separation of multiple local-damage-related components from vibration data using nonnegative matrix factorization and multichannel data fusion. Mech. Syst. Signal Process. 2020, 145, 106954. [Google Scholar] [CrossRef]
- Gładysiewicz, L.; Król, R.; Kisielewski, W. Measurements of loads on belt conveyor idlers operated in real conditions. Measurement 2019, 134, 336–344. [Google Scholar] [CrossRef]
- Sclater, N.; Chironis, N.P. Mechanisms and Mechanical Devices Sourcebook; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Prikhodko, A.A. Experimental kinematic analysis of an intermittent motion planetary mechanism with elliptical gears. J. Meas. Eng. 2020, 8, 122–131. [Google Scholar] [CrossRef]
- Sujan, V.A.; Meggiolaro, M.A. Dynamic optimization of Geneva mechanisms. In Proceedings of the International Conference on Gearing, Transmissions and Mechanical Systems, London, UK, 3–6 July 2000; pp. 687–696. [Google Scholar]
- Lee, J.-J.; Jan, B.-H. Design of Geneva mechanisms with curved slots for non-undercutting manufacturing. Mech. Mach. Theory 2009, 44, 1192–1200. [Google Scholar] [CrossRef]
- Kozhevnikov, S.N.; Esipenko, Y.I.; Raskin, Y.M. Mechanisms; Mechanical Engineering: Moscow, Russia, 1976. [Google Scholar]
- Zheng, F.; Hua, L.; Han, X.; Li, B.; Chen, D. Synthesis of indexing mechanisms with non-circular gears. Mech. Mach. Theory 2016, 105, 108–128. [Google Scholar] [CrossRef]
- Lin, C.; Xia, X.; Li, P. Geometric design and kinematics analysis of coplanar double internal meshing non-circular planetary gear train. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Maláková, S.; Urbanský, M.; Fedorko, G.; Molnár, V.; Sivak, S. Design of geometrical parameters and kinematical characteristics of a non-circular gear transmission for given parameters. Appl. Sci. 2021, 11, 1000. [Google Scholar] [CrossRef]
- Danieli, G.A.; Mundo, D. New developments in variable radius gears using constant pressure angle teeth. Mech. Mach. Theory 2005, 40, 203–217. [Google Scholar] [CrossRef]
- Karpov, O.; Nosko, P.; Fil, P.; Nosko, O.; Olofsson, U. Prevention of resonance oscillations in gear mechanisms using non-circular gears. Mech. Mach. Theory 2017, 114, 1–10. [Google Scholar] [CrossRef]
- Gao, N.; Meesap, C.; Wang, S.; Zhang, D. Parametric vibrations and instabilities of an elliptical gear pair. J. Vib. Control 2020, 26, 1721–1734. [Google Scholar] [CrossRef]
- Liu, J.Y.; Chang, S.L.; Mundo, D. Study on the use of a non-circular gear train for the generation of Figure-8 patterns. Proc. Inst. Mech. Eng. Part C 2006, 220, 1229–1236. [Google Scholar] [CrossRef]
- Prikhodko, A.A. Intermittent-motion planetary mechanism with elliptical gears. Russ. Eng. Res. 2020, 40, 1084–1086. [Google Scholar] [CrossRef]
- Zheng, F.; Hua, L.; Han, X.; Li, B.; Chen, D. Linkage model and manufacturing process of shaping non-circular gears. Mech. Mach. Theory 2016, 96, 192–212. [Google Scholar] [CrossRef]
- Sałacinski, T.; Przesmycki, A.; Chmielewski, T. Technological aspects in manufacturing of non-circular gears. Appl. Sci. 2020, 10, 3420. [Google Scholar] [CrossRef]
- Wojtkowiak, D.; Talaska, K.; Wilczynski, D.; Górecki, J.; Wałesa, K. Determining the power consumption of the automatic device for belt perforation based on the dynamic model. Energies 2021, 14, 317. [Google Scholar] [CrossRef]
- Prikhodko, A.A.; Smelyagin, A.I. Dynamic analysis of rotationally reciprocating stirred tank with multiple impellers. In Proceedings of the 2015 International Conference on Mechanical Engineering, Automation and Control Systems, Tomsk, Russia, 1–4 December 2015. [Google Scholar]
- Braune, S.; Liu, S.; Mercorelli, P. Design and control of an electromagnetic valve actuator. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006. [Google Scholar]
- Su, Y.; Zheng, C.; Mercorelli, P. Velocity-free friction compensation for motion systems with actuator constraint. Syst. Signal Process. 2021, 148, 107132. [Google Scholar] [CrossRef]
- Liu, X.; Nagamura, K.; Ikejo, K. Analysis of the dynamic characteristics of elliptical gears. J. Adv. Mech. Des. Syst. Manuf. 2012, 6, 484–497. [Google Scholar] [CrossRef] [Green Version]
- Cai, Z.; Lin, C. Dynamic model and analysis of nonlinear vibration characteristic of a curve-face gear drive. J. Mech. Eng. 2017, 63, 161–171. [Google Scholar] [CrossRef]
- Zhao, Y.; Yu, G.H.; Wu, C.Y. Circuit Simulation and Dynamic Analysis of a Transplanting Mechanism with Planetary Elliptical Gears. Trans. ASABE 2011, 54, 1179–1188. [Google Scholar] [CrossRef]
- Prikhodko, A.A.; Smelyagin, A.I. Balancing of the planetary actuator of the reciprocating stirring device. Mech. Eng. Autom. 2016, 4, 62–67. (In Russian) [Google Scholar]
- Prikhodko, A.A.; Smelyagin, A.I. Dynamics of rotationally reciprocating stirred tank with planetary actuator. J. Phys. Conf. Ser. 2017, 858, 12026. [Google Scholar] [CrossRef] [Green Version]
- Yazici, A.; Altas, I.; Ergenc, T. Symbolic polynomial interpolation using Mathematica. In International Conference on Computational Science; Springer: Berlin/Heidelberg, Germany, 2004; pp. 364–369. [Google Scholar]
- Prikhodko, A.A. Structural and kinematic analysis of a stirred tank planetary drive. MATEC Web Conf. 2018, 226, 1012. [Google Scholar] [CrossRef]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prikhodko, A. Dynamic Analysis of Intermittent-Motion Conveyor Actuator. Actuators 2021, 10, 174. https://doi.org/10.3390/act10080174
Prikhodko A. Dynamic Analysis of Intermittent-Motion Conveyor Actuator. Actuators. 2021; 10(8):174. https://doi.org/10.3390/act10080174
Chicago/Turabian StylePrikhodko, Alexander. 2021. "Dynamic Analysis of Intermittent-Motion Conveyor Actuator" Actuators 10, no. 8: 174. https://doi.org/10.3390/act10080174
APA StylePrikhodko, A. (2021). Dynamic Analysis of Intermittent-Motion Conveyor Actuator. Actuators, 10(8), 174. https://doi.org/10.3390/act10080174