2.1. Reliability-Driven Requirements
To satisfy the reliability requirements for EMAs in flight controls, an approach in line with SAE ARP4761 [
9] is selected. This guideline is a common methodology in aerospace to demonstrate compliance with required reliability and safety levels. It assists in the definition of functional safety requirements in a top-down approach followed by detailed system safety analyses in a bottom-up verification step.
UAVs with an equivalent manned certification basis of CS-VLA are subject to their own airworthiness standards. The European Union Aviation Safety Agency (EASA) published the rulemaking document SC-RPAS.1309 [
10], according to which a catastrophic failure condition should not occur more frequently than 10–6 times per flight hour. Using these constraints, we performed an aircraft/system functional hazard assessment (FHA) which was previously published [
2]. The analysis illustrated that the most stringent actuation safety requirements induced on the system level could be found in rotorcraft. This led to the selection of the ALAADy Gyrocopter as a use case for the prototype actuator. EMAs performing functions with catastrophic failure conditions require a high level of development independence. Thus, by assuming a secondary system (e.g., a parachute), the EMA criticality can be reduced to ‘hazardous’, and requirements for independent development of redundant components can be (partially) eliminated. These considerations as well as the aircraft functional layout then lead to a required failure probability for one actuation leg of less than 5 × 10
−6 per flight hour.
From both quantitative and qualitative perspectives, the EMA must comply with the relevant regulations of SC-RPAS.1309. The architecture finding process introduced in [
2] provides a structured approach linking the safety assessment with preliminary design activities. Qualitative and quantitative criticality data for individual failure modes from [
11,
12,
13,
14,
15,
16,
17,
18,
19] assisted in the preliminary safety assessment. We regard the following results as noteworthy:
For UAV use cases, a duplex-redundant architecture of the electronic/electrical hardware is sufficient;
A single mechanical load path is acceptable if mechanical components are designed according to the required service life and failure probabilities.
2.2. Fault-Tolerant Features and Quantitative System Safety Assessment
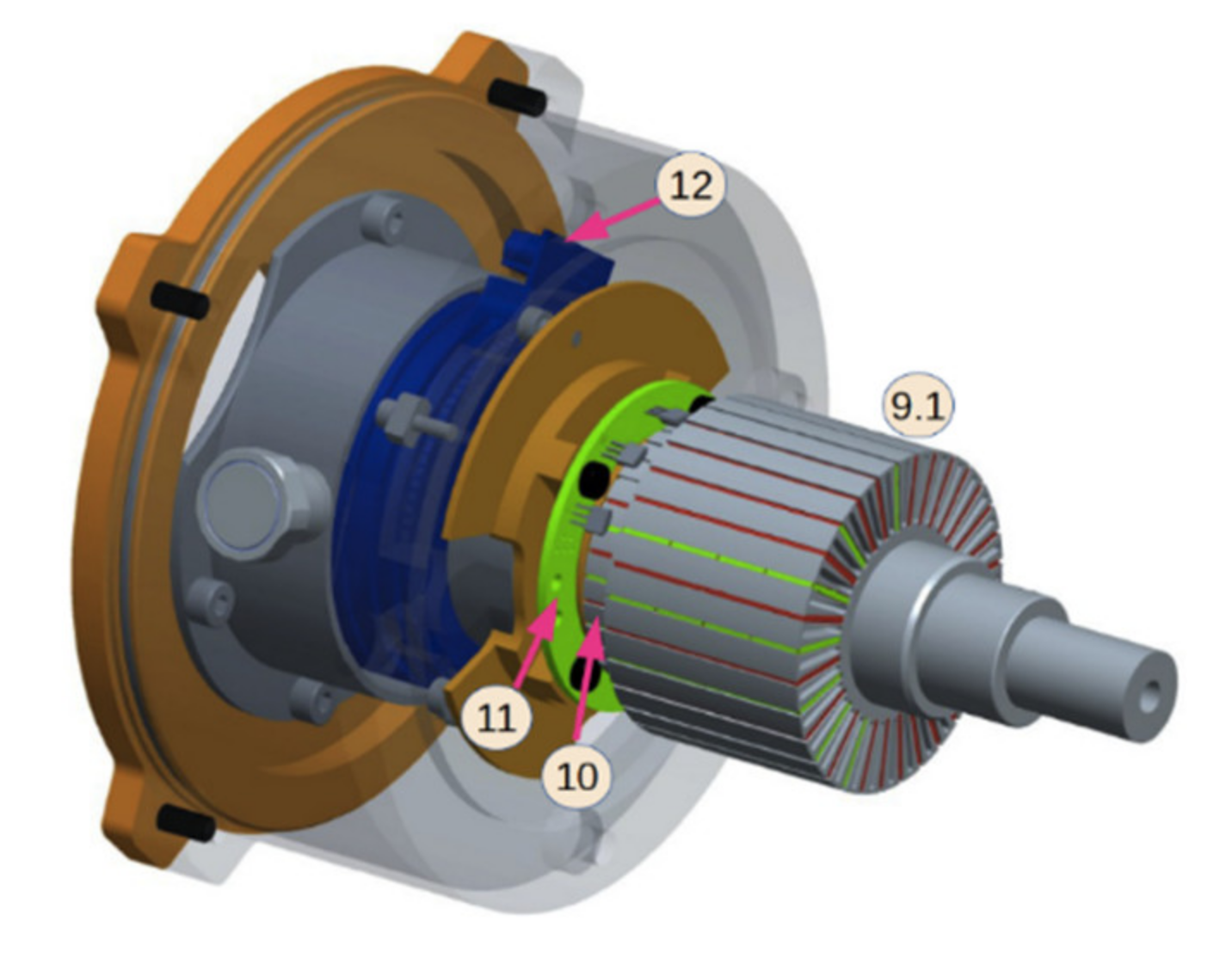
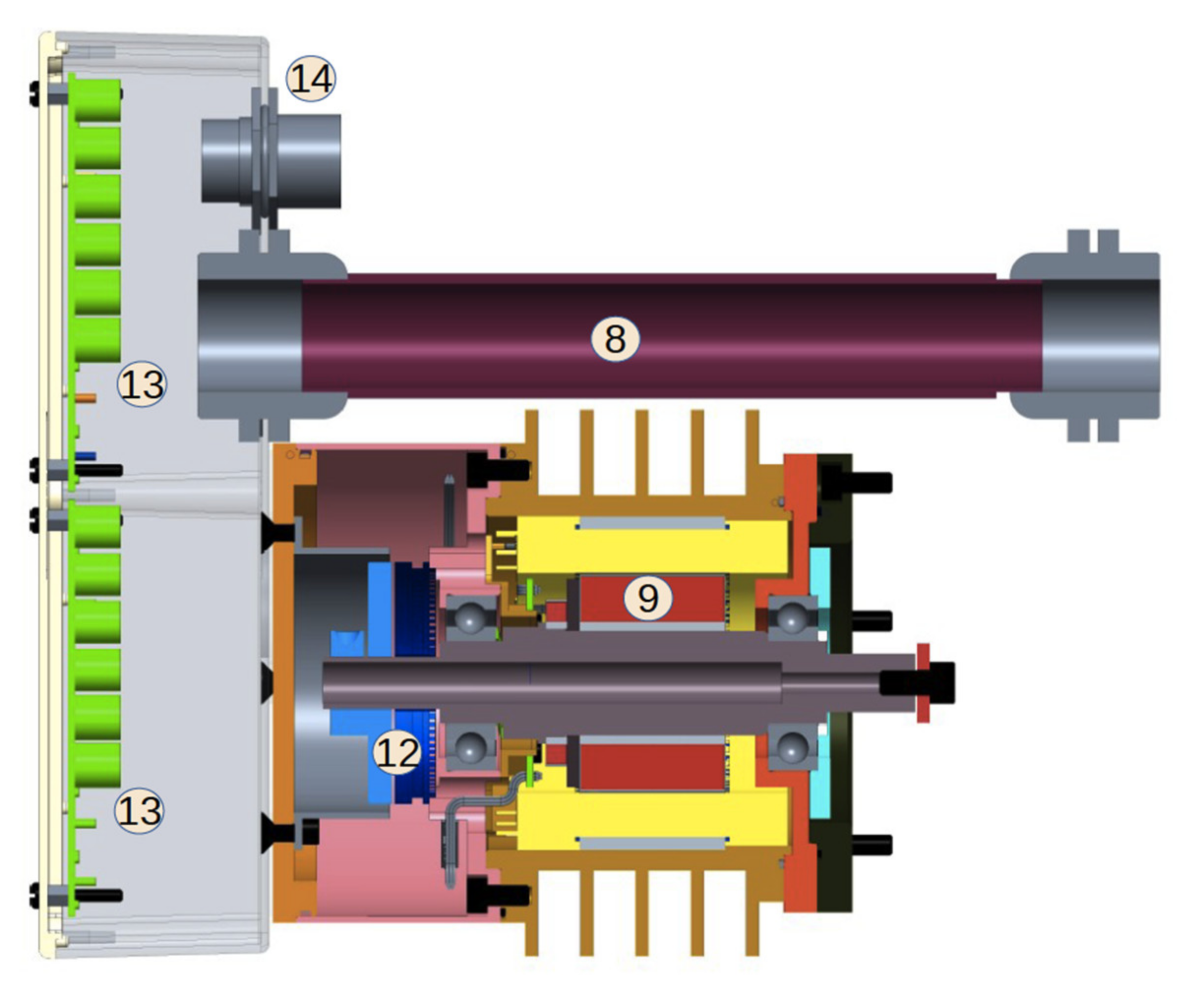
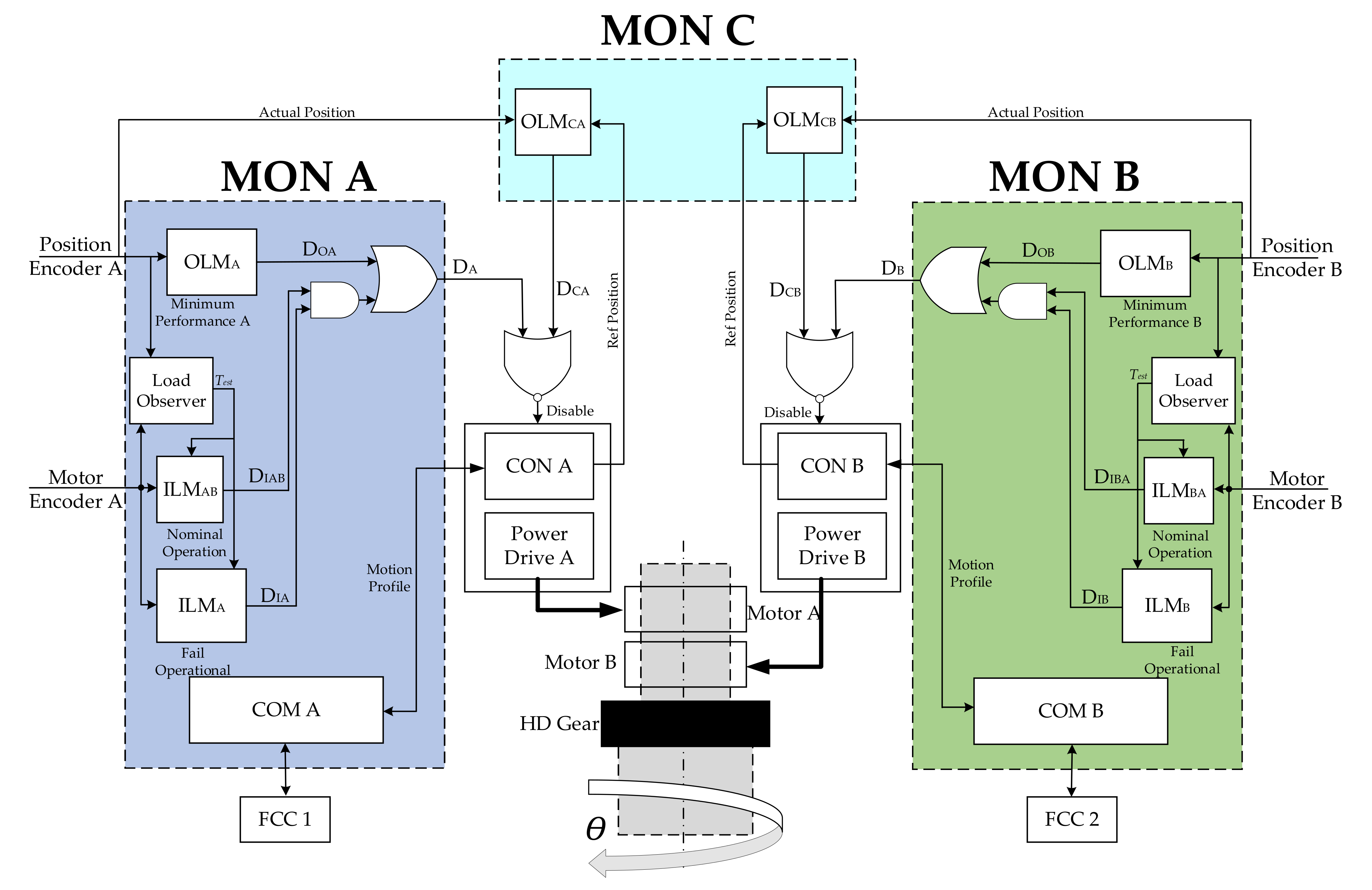
The actuator architecture, as shown in
Figure 1, represents the fault-tolerant architecture of the EMA. Segregation of all electrical and electronic components enables a robust fault-tolerant design. Consequently, there are separate Controller (CON) and Monitoring Units (MON) in separate Actuator Control Units (ACU). Both channels feature independent power supplies and drive independent rotor arrangements. Every channel contains its independent motor and position encoders. The mechanical load path features a Harmonic Drive gearbox and a single output. According to
Table 1, the fault-tolerant strategy includes three general EMA operating modes:
For verification of compliance with quantitative reliability targets, SAE ARP4761 [
9] suggests using a stochastic Markov Model. Bonivento et al. [
20] have used this methodology and illustrated the method’s ability to represent different system operating states. A system state change is modeled using failure rates
λ [1/h] in this case.
Figure 2 illustrates the system’s detailed failure behavior for the ‘loss of actuation’ failure condition. This process is represented by nine different operating states and three operating modes. Each of the six Fail Safe states is equivalent to a ‘loss of actuation’. The probability of the system to be in any operating mode at a given point in time
t is expressed using the following equation (Equation (1)):
In the beginning of the analysis, the system is in the Normal Mode, i.e., PNM (t = 0) = 1, PFO (t = 0) = 0, PFS (t = 0) = 0.
Entering Fail Operational Modes (FO1 and FO2) is triggered in case of a failure occurs in one or both channels. The respective failure rates are λChannel and λMon. Each channel contains its independent components (controller (CON), Monitoring Unit (MON), windings, power electronics, etc.). For the first failure, the fault detection rate KD quantifies the ability of fault detection. In the case of failed detection, represented by 1-KD, the transition to the Fail Safe Mode (UFS1 and UFS2) is assumed to be performed on a UAV level. Modes FS1 and FS2 are triggered if a consecutive failure is detected during the Fail Operational Modes. Any relevant mechanical failure occurring with the failure rate λMech is presumed to immediately trigger the Fail Safe Mode. In addition, a common cause of electrical failure could jeopardize the redundant concept. If detected, this also activates the Fail Safe Mode. However, as quantifying these effects requires in-depth field data, we estimate the common cause rate to be λCC,electric = 0.5 λMotor, with λMotor representing the failure rate of the electric motor.
The Markov chain is simulated according to the following equation (Equation (2)), where
Pi (
Pj) stands for the probability of the system to be in state
i(
j) and
λij is the transition rate from state
i to state
j:
Component failure rates are computed in a bottom-up approach using manufacturer data, mechanical reliability models and the FIDES approach. FIDES provides electronic failure rates based on a multitude of technical and manufacturing aspects [
21].
Table 2 illustrates the failure rate methodology:
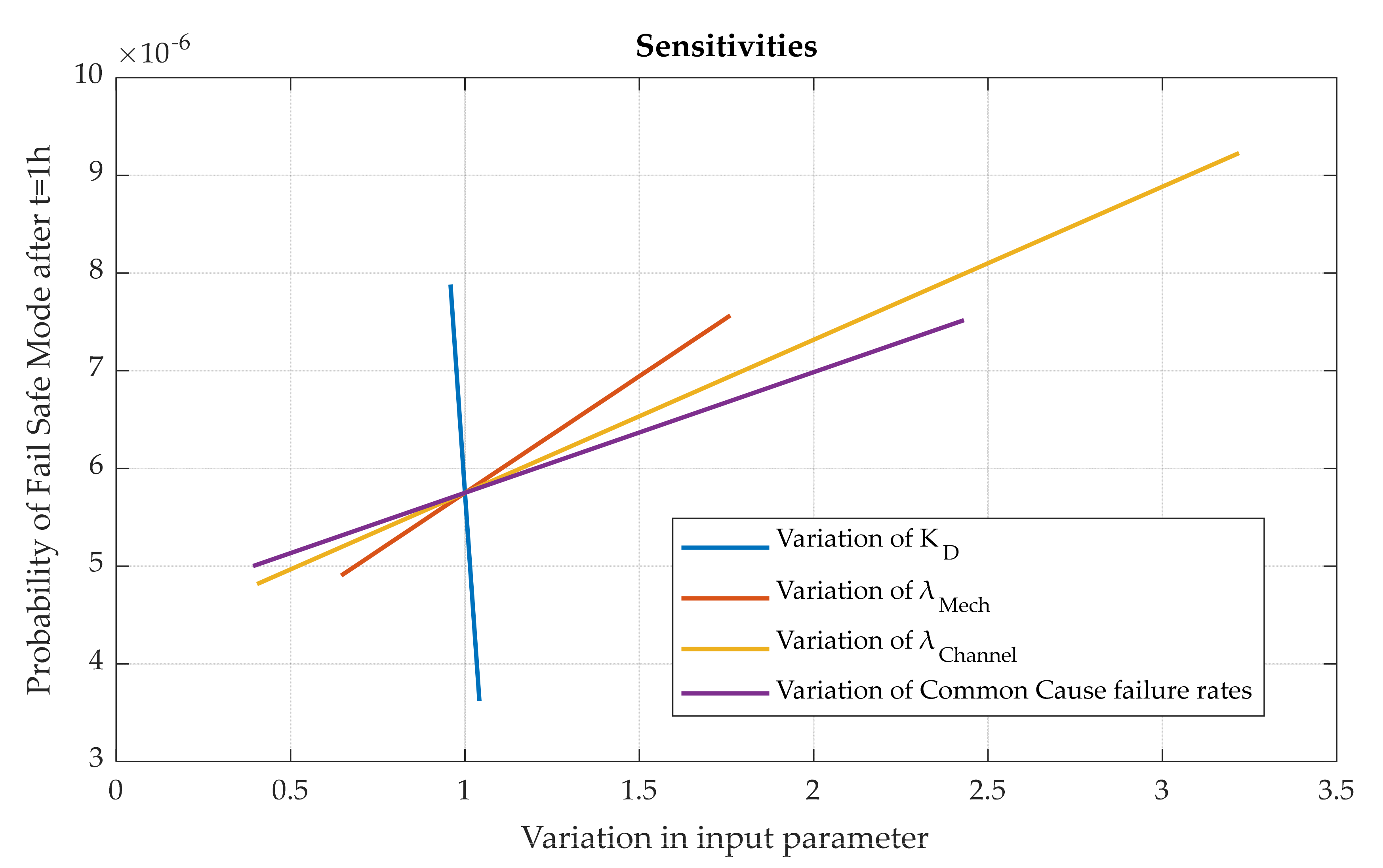
Figure 3 shows the results of the Markov analysis as part of a sensitivity study. The chart depicts the estimated overall failure probability of the actuator after
t = 1 h, plotted over the variation of previously introduced input parameters. Variation of the respective parameters is based on available minimum, median and maximum values.
The chart illustrates that the channel failure rate is subject to the highest uncertainties since this parameter is influenced by a variety of components. Any component within one channel subject to an increased risk of failure (e.g., due to manufacturing, uncertainty in development and testing, etc.) influences the overall failure probability to a high extent. This result stresses the requirement for high-quality aerospace components to be used coupled with an appropriate level of design assurance.
λMech and the common cause failure rate have similar effects on the overall reliability. A major impact is caused by the fault detection rate
KD (reference is
KD = 0.96). It presents the highest gradient and an increase to 0.98 could bring the actuator to the level of certification (5 × 10
−6 1/h), emphasizing the importance of a well-proven health monitoring system (see
Section 4).
2.3. Qualitative Criticality Assessment and Inputs for Health Monitoring
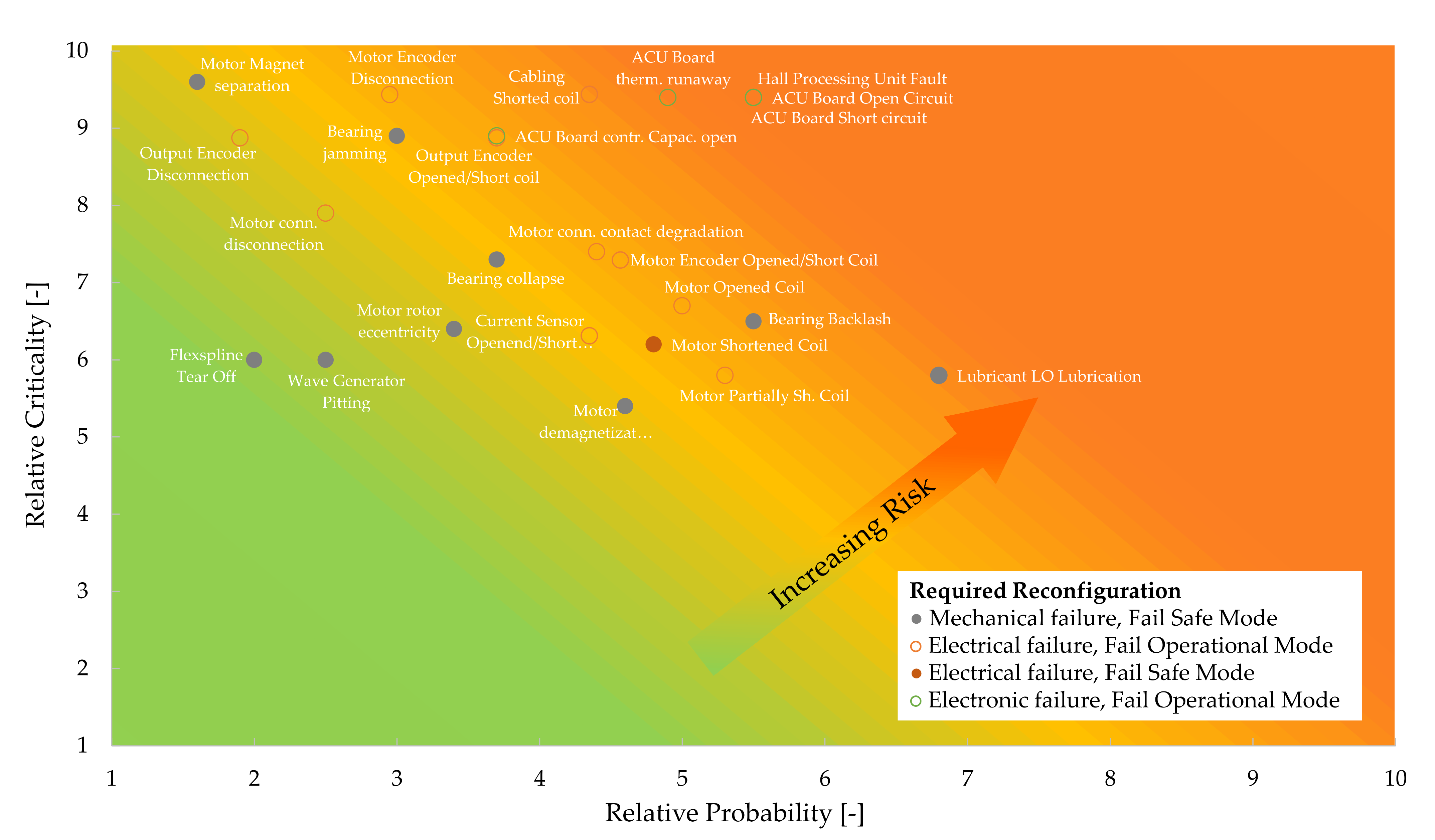
In addition to the quantitative assessment, qualitative criticality analyses assist in identifying critical failure modes and focus areas of the EMA. This analysis, however, is subject to an increased level of uncertainty, as literature data are limited and available data are oftentimes referring to similar but non-identical EMA architectures. Therefore, the following analysis, illustrated in
Figure 4, provides only an approximate data basis.
Figure 4 shows mean EMA criticality data from different sources, including the desired operating modes. All electronic and electrical failures should be dealt with by means of the redundant channel design and should therefore not directly lead to the Fail Safe Mode. One exemption is the ‘Motor Shortened Coil’ as there might be severe short circuits affecting both redundant branches, as previously discussed. Mechanical failures may directly trigger the Fail Safe Mode.
In an effort to evaluate the behavior of the Health Monitoring System (
Section 4), it is essential to closely regard the relevant failure modes from
Figure 4 as well as to estimate the system’s ability to safely execute the transitions between the operating modes. We therefore concentrate on essential mechanical failure modes and on those failures leading to the Fail Operational Mode.
Table 3 provides a list of faults, including their target operation modes, to be investigated in more detail. Detailed descriptions for the injection approaches of the faults in
Table 3 are furnished in
Section 5.1.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}