
Adaptive Robust Tracking Control for Near Space Vehicles with Multi-Source Disturbances and Input–Output Constraints


Abstract
:1. Introduction
- (1)
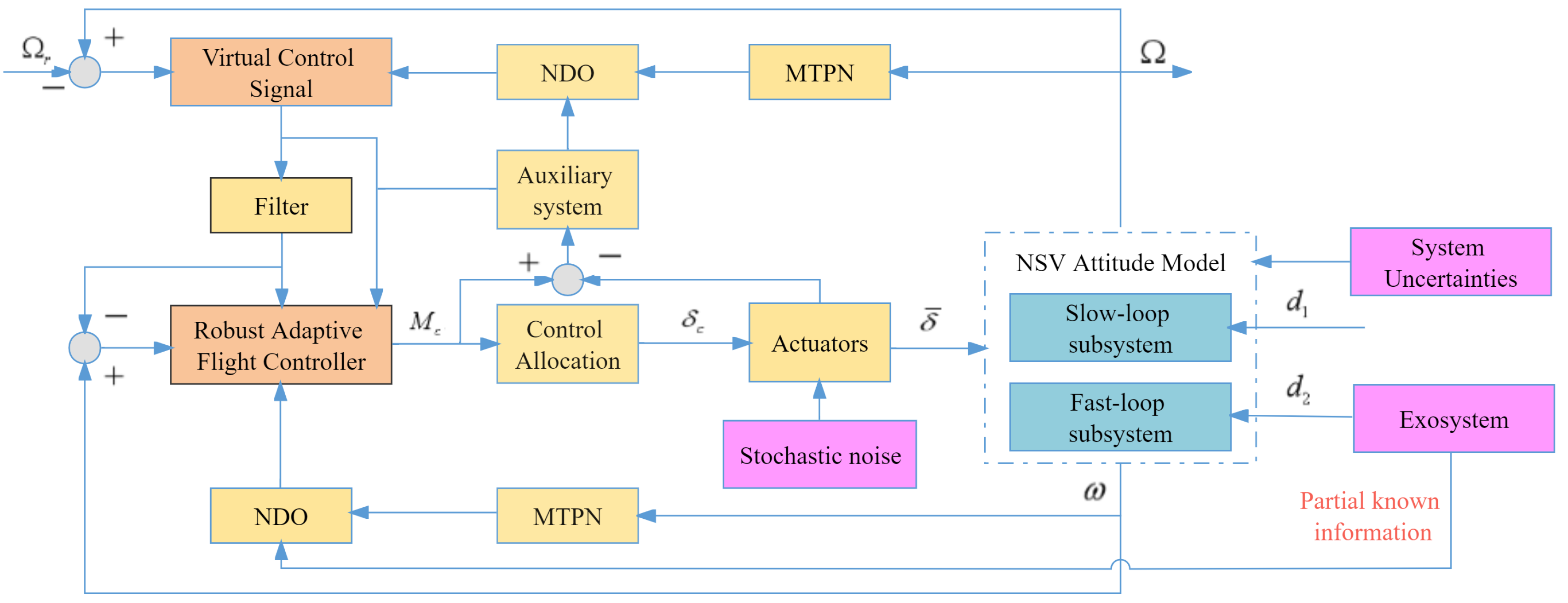
- Considering the simultaneous influence of multi-source disturbances, system modeling uncertainties and input–output constraints acting on the NSV attitude control system, and according to stochastic theory, a novel attitude motion dynamic of the NSVs is modeled as the MIMO stochastic nonlinear system.
- (2)
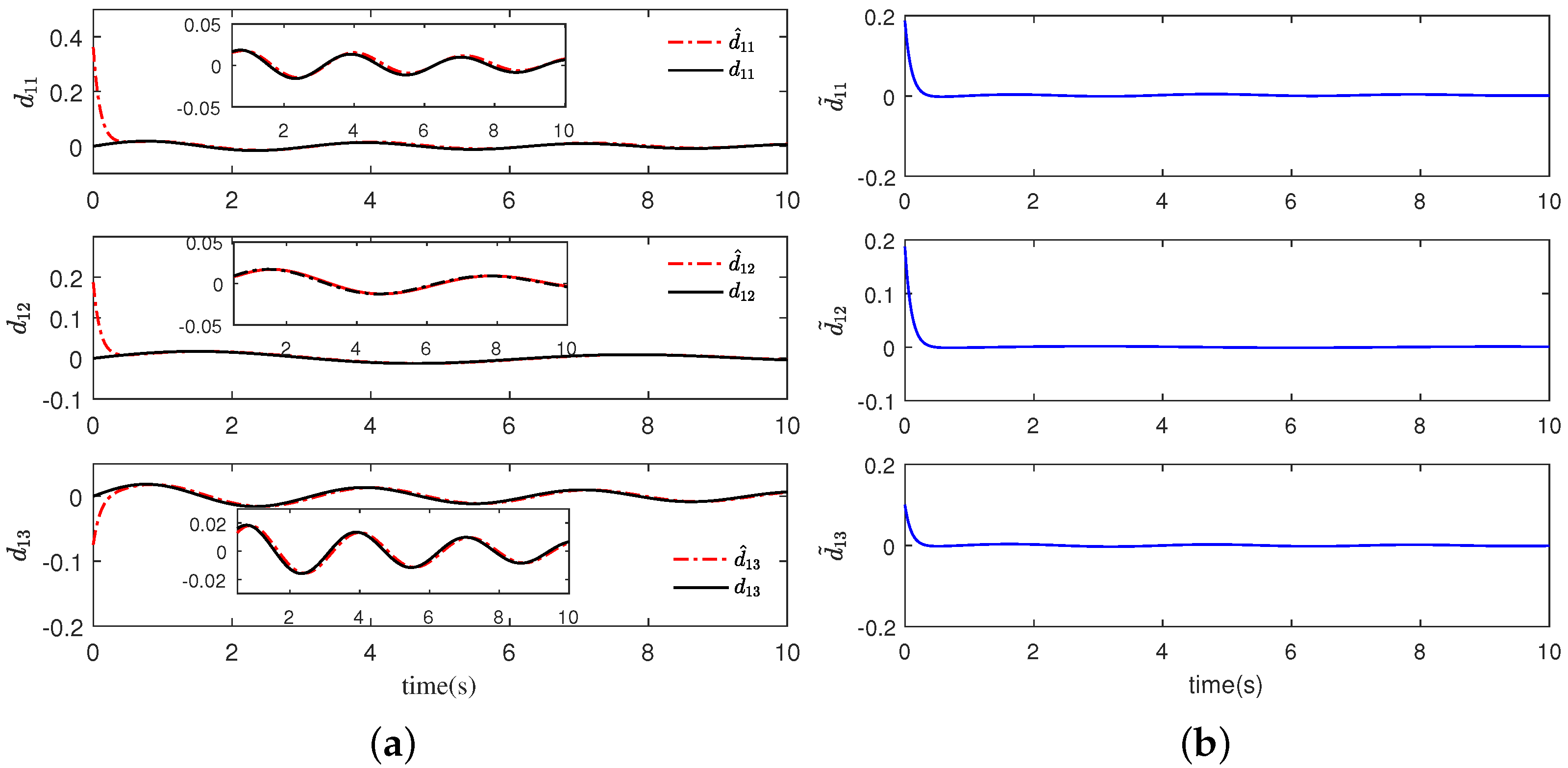
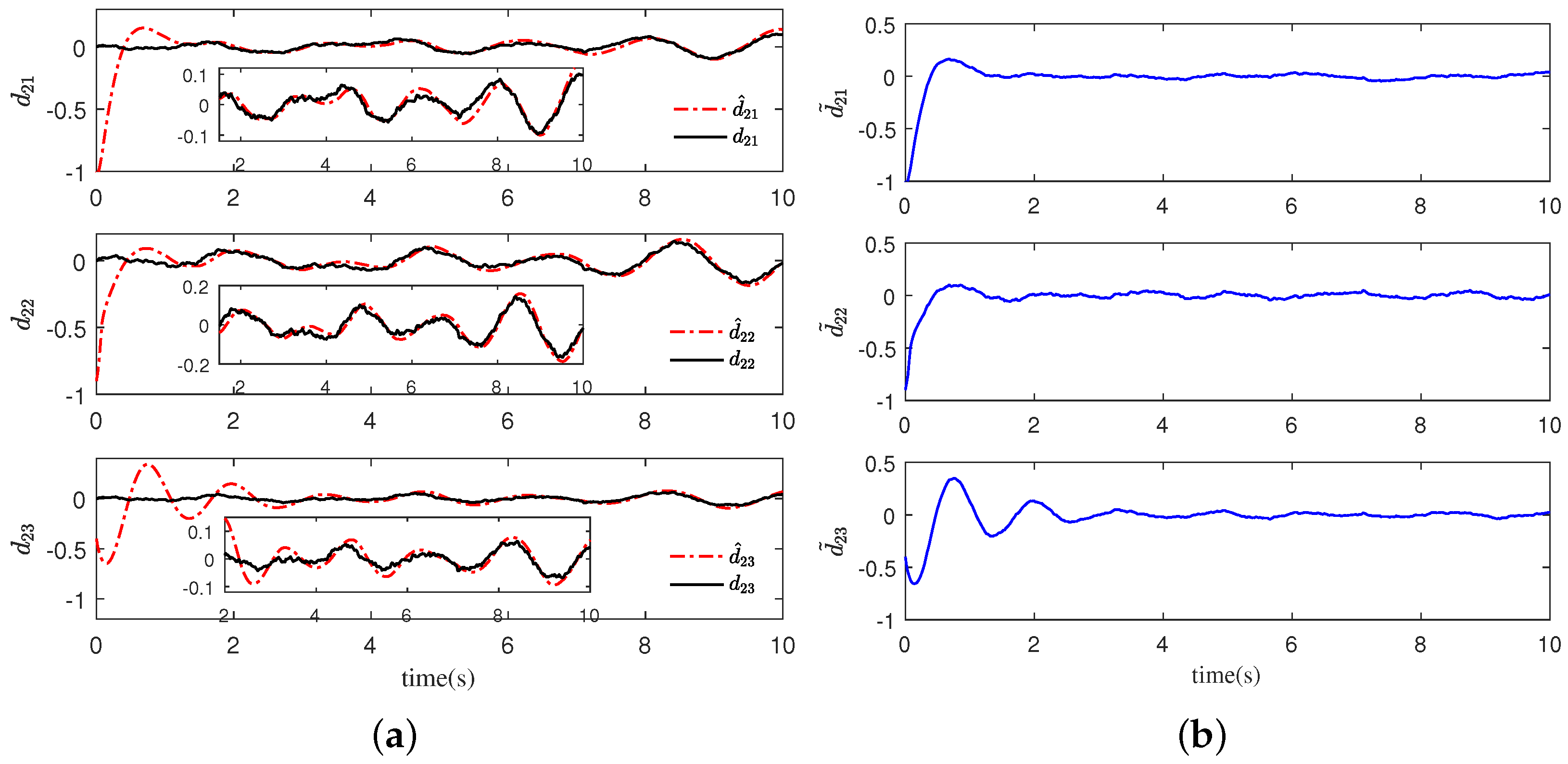
- To improve the control time-effectiveness, MTPN is utilized to handle the system uncertainties. The interactive design is realized by incorporating MTPN and DO, and a nonlinear DO based on MTPN is designed to estimate the external time-varying disturbances.
- (3)
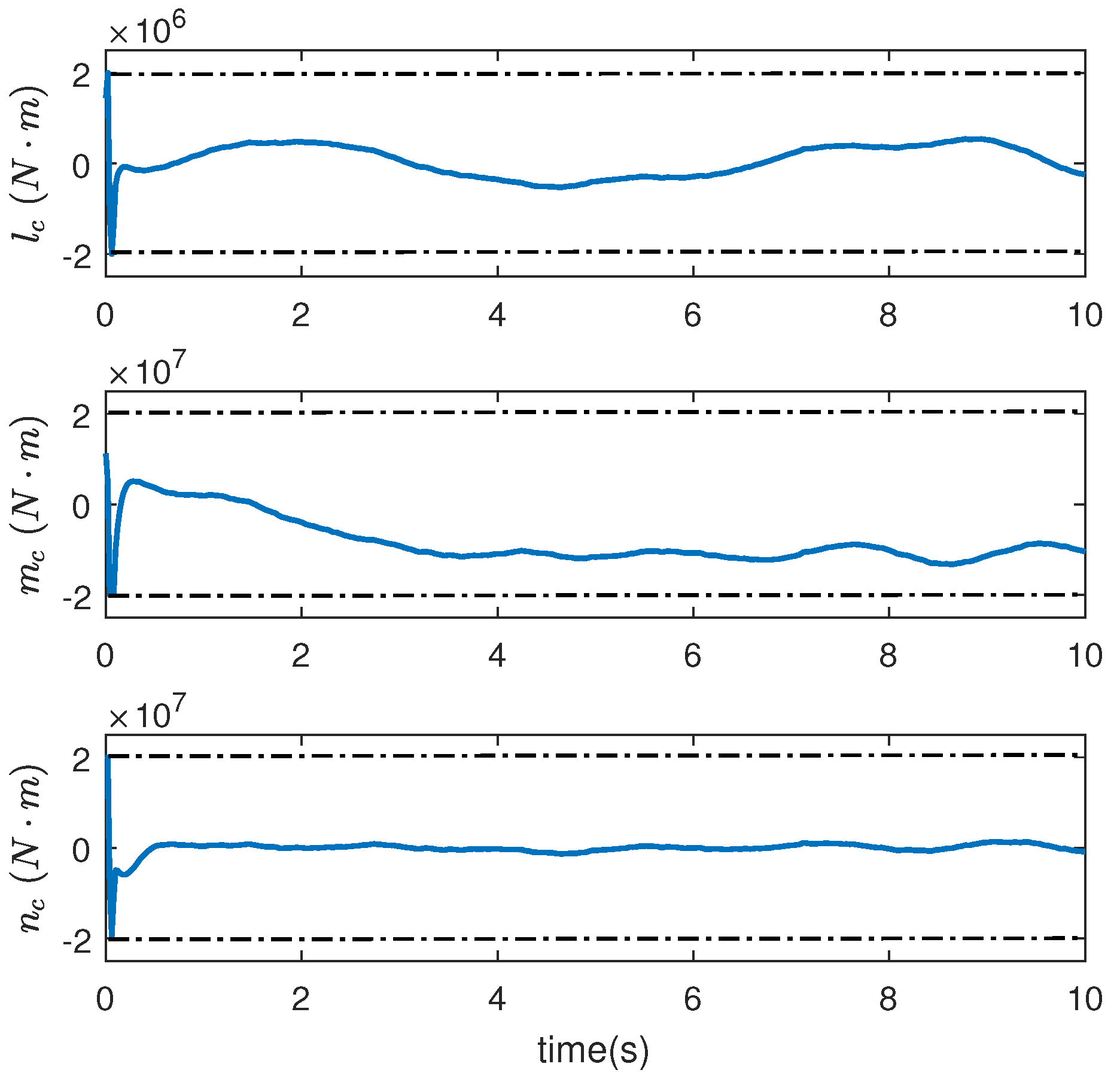
- By constructing the auxiliary system to tackle the input saturation and introducing TBLF to solve the output constraint, the constrained control strategy can be obtained. The adaptive robust stochastic control scheme is developed based on NDO, MTPN, and auxiliary system, and the closed-loop system stability in the sense of probability is analyzed based on stochastic Lyapunov stability theory.
2. Preliminaries
3. Problem Formulation
4. Adaptive Robust Stochastic Controller Design Based on NDO and TBLF
4.1. Adaptive Constrained Controller Design
4.2. Stability Analysis of the Closed-Loop System
- (1)
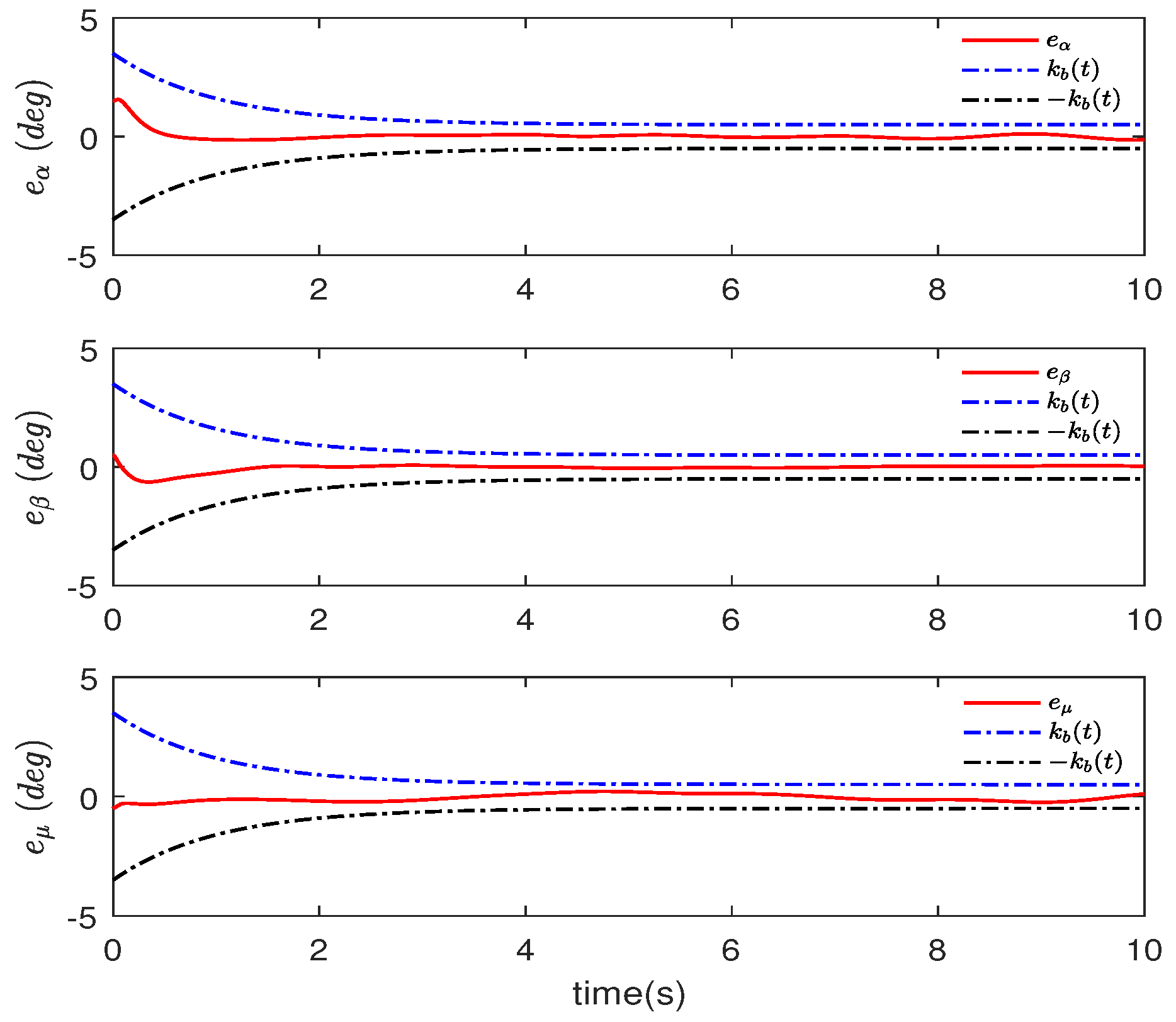
- The tracking errors meet the output constraint requirements in the sense of probability.
- (2)
- All the closed-loop system signals are semi-globally uniform and ultimately bounded in the sense of probability. In particular, by selecting appropriate design parameters, the tracking error signals can converge to a small neighborhood ℵ in the sense of fourth-order moments, and ℵ is defined in the following form:where .
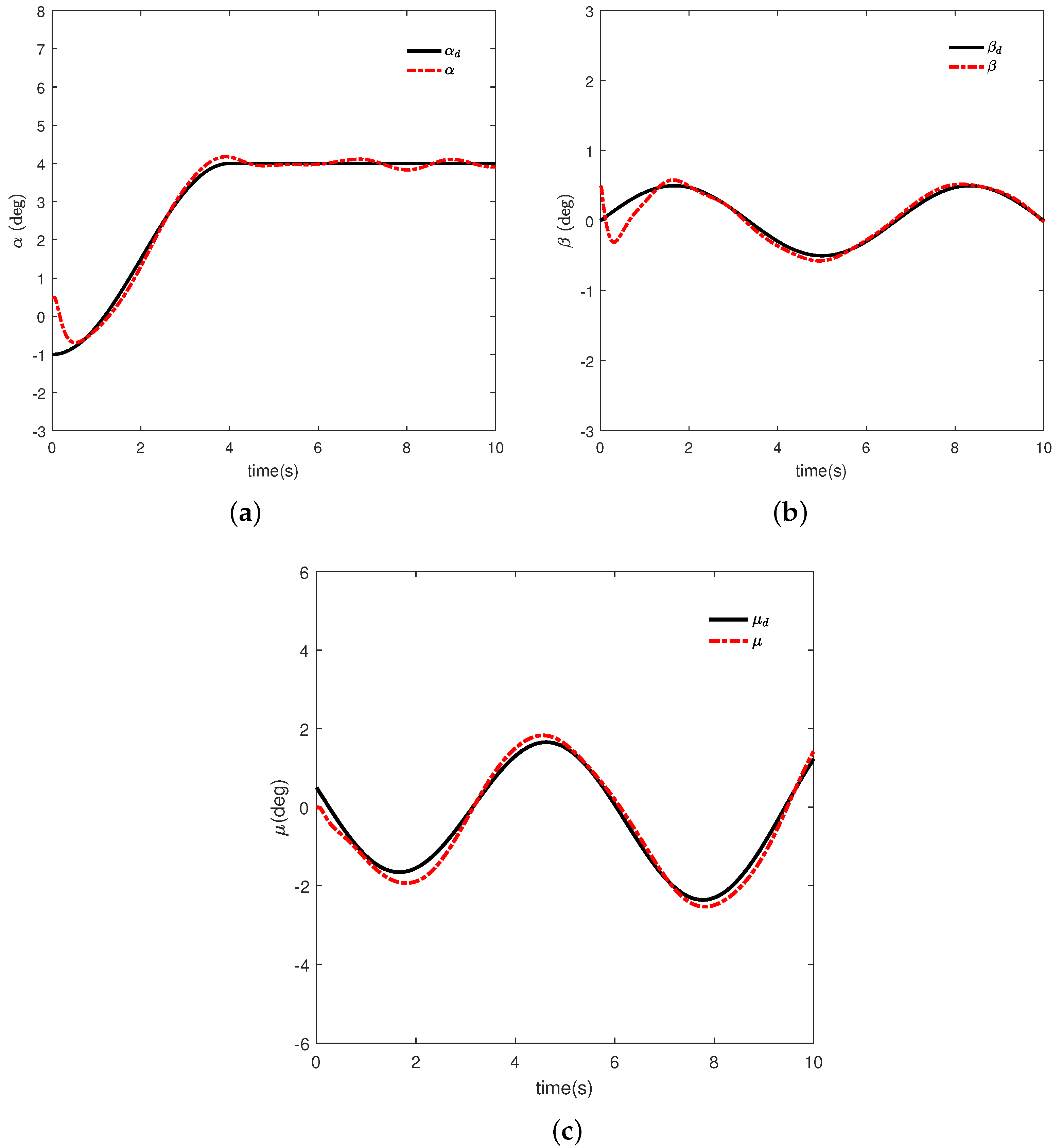
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cui, E. Research statutes, development trends and key technical problems of near space vehicles. Adv. Mech. 2009, 39, 658–673. [Google Scholar]
- Bu, X.; Wu, X.; Ma, Z.; Zhang, R. Novel Adaptive Neural Control of Flexible Air-breathing Hypersonic Vehicles Based on Sliding Mode Differentiator. Chin. J. Aeronaut. 2015, 28, 1209–1216. [Google Scholar] [CrossRef]
- Xu, H.; Mirmirani, M.; Ioannou, P. Adaptive sliding mode control design for a hypersonic flight vehicle. J. Guid. Control Dyn. 2004, 27, 829–838. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, C.; Wu, Q. Attitude tracking control for variable structure near space vehicles based on switched nonlinear systems. Chin. J. Aeronaut. 2013, 26, 186–193. [Google Scholar] [CrossRef]
- Wu, H.; Liu, Z.; Guo, L. Robust -gain fuzzy disturbance observer-based control design with adaptive bounding for a hypersonic vehicle. IEEE Trans. Fuzzy Syst. 2013, 22, 1401–1412. [Google Scholar] [CrossRef]
- Xu, B. Robust adaptive neural control of flexible hypersonic flight vehicle with dead-zone input nonlinearity. Nonlinear Dyn. 2015, 80, 1509–1520. [Google Scholar] [CrossRef]
- Yan, X.; Chen, M.; Shao, S.; Wu, Q. Polynomial networks based adaptive attitude tracking control for NSVs with input constraints and stochastic noises. Chin. J. Aeronaut. 2021, 34, 124–134. [Google Scholar] [CrossRef]
- Shao, S.; Chen, M. Robust discrete-time fractional-order control for an unmanned aerial vehicle based on disturbance observer. Int. J. Robust Nonlinear Control 2022, 32, 4665–4682. [Google Scholar] [CrossRef]
- Shao, S.; Chen, M.; Hou, J.; Zhao, Q. Event-triggered-based discrete-time neural control for a quadrotor UAV using disturbance observer. IEEE/ASME Trans. Mechatron. 2021, 26, 689–699. [Google Scholar] [CrossRef]
- Ren, Y.; Zhao, Z.; Ahn, C.; Li, H. Adaptive fuzzy control for an uncertain axially moving slung-load cable system of a hovering helicopter with actuator fault. IEEE Trans. Fuzzy Syst. 2022, in press. [Google Scholar] [CrossRef]
- Su, J.; Chen, W.; Yang, J. On relationship between time-domain and frequency-domain disturbance observers and its applications. J. Dyn. Syst. Meas. Control 2016, 138, 091013. [Google Scholar] [CrossRef] [Green Version]
- Chen, W. Nonlinear disturbance observer-enhanced dynamic inversion control of missiles. J. Guid. Control Dyn. 2003, 26, 161–166. [Google Scholar] [CrossRef]
- Li, X.; Xian, B.; Chen, D.; Yu, Y.; Zhang, Y. Output feedback control of hypersonic vehicles based on neural network and high gain observer. Sci. China Inf. Sci. 2011, 54, 429–447. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Sun, C.; Guo, L. Nonlinear-disturbance-observer-based robust flight control for air-breathing hypersonic vehicles. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1263–1275. [Google Scholar] [CrossRef]
- Chen, M.; Ren, B.; Wu, Q.; Jiang, C. Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer. Sci. China Inf. Sci. 2015, 58, 1–12. [Google Scholar] [CrossRef]
- Xu, B.; Wang, D.; Zhang, Y.; Shi, Z. DOB-based neural control of flexible hypersonic flight vehicle considering wind effects. IEEE Trans. Ind. Electron. 2017, 64, 8676–8685. [Google Scholar] [CrossRef]
- Wu, H.; Feng, S.; Liu, Z.; Guo, L. Disturbance observer-based robust mixed H2/H∞ fuzzy tracking control for hypersonic vehicles. Fuzzy Sets Syst. 2017, 306, 118–136. [Google Scholar] [CrossRef]
- Sinha, A.; Miller, D. Optimal sliding-mode control of a flixible spacecraft under stochastic disturbances. J. Guid. Control. Dyn. 1995, 18, 486–492. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, L.; Shi, P. Robust control of stochastic systems against bounded disturbances with application to flight control. IEEE Trans. Ind. Electron. 2013, 61, 1504–1515. [Google Scholar] [CrossRef]
- Samiei, E.; Izadi, M.; Viswanathan, S.; Sanyal, A.; Butcheret, E. Robust stabilization of rigid body attitude motion in the presence of a stochastic input torque. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 428–433. [Google Scholar]
- Chen, B.; Wang, C.; Lee, M. Stochastic robust team tracking control of MIMO-UAV networked system under wiener and poisson random fluctrations. IEEE Trans. Cybern. 2020, 51, 5786–5799. [Google Scholar] [CrossRef]
- Lv, M.; Li, Y.; Pan, W.; Baldi, S. Finite-time fuzzy adaptive constrained tracking control for hypersonic flight vehicles with singularity-free switching. IEEE/ASME Trans. Mechatronics 2022, 27, 1594–1605. [Google Scholar] [CrossRef]
- Zhao, Z.; Ren, Y.; Mu, C.; Zou, T.; Hong, K. Adaptive neural-network-based fault-tolerant for a flexible string with composite disturbance observer and input constraints. IEEE Trans. Cybern. 2021, in press. [Google Scholar] [CrossRef] [PubMed]
- Yan, X.; Chen, M.; Feng, G.; Wu, Q.; Shao, S. Fuzzy robust constrained control for nonlinear systems with input saturation and external disturbances. IEEE Trans. Fuzzy Syst. 2021, 29, 345–356. [Google Scholar] [CrossRef]
- Shao, S.; Chen, M. Adaptive neural discrete-time fractional-order control for an UAV system with prescribed performance using disturbance observer. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 742–754. [Google Scholar] [CrossRef]
- Ren, Y.; Zhao, Z.; Zhang, C.; Yang, Q.; Hong, K. Adaptive neural-network boundary control for a flexible manipulator with input constraints and model uncertainties. IEEE Trans. Cybern. 2021, 51, 4796–4807. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Zhang, J.; Liu, Z.; Mu, C.; Hong, K. Adaptive neural network control of an uncertain 2-DOF helicopter with unknown backlash-like hysteresis and output constraints. IEEE Trans. Neural Netw. Learn. Syst. 2022, in press. [Google Scholar] [CrossRef]
- Khas’Miniskii, R. Stochastic Stability of Differential Equations; Springer: Berlin/Heidelberg, Germany, 1980. [Google Scholar]
- Yan, H.; Kang, A. Asymptotic tracking and dynamic regulation of SISO nonlinear system based on discrete multi-dimensional Taylor network. IET Control. Theory Appl. 2017, 11, 1619–1626. [Google Scholar] [CrossRef]
- Han, Y.; Zhu, S.; Yang, S. Adaptive multi-dimensional Taylor network tracking control for a class of stochastic nonlinear systems with unknown input dead-zone. IEEE Access 2018, 6, 34543–34554. [Google Scholar] [CrossRef]
- Wang, H.; Liu, X.; Liu, K.; Karimi, H. Approximation-based adaptive fuzzy tracking control for a class of nonstrict-feedback stochastic nonlinear time-delay systems. IEEE Trans. Fuzzy Syst. 2015, 23, 1746–1760. [Google Scholar] [CrossRef]
- Du, Y.; Wu, Q.; Jiang, C.; Xue, Y. Adaptive recurrent-functional-link-network control for hypersonic vehicles with atmospheric disturbances. Sci. China Inf. Sci. 2011, 54, 482–497. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meaning | Value | Unit |
|---|---|---|
| vehicle length | 60.69 | m/s |
| vehicle mass | 136,820 | kg |
| reference area | 334.73 | m |
| mean aerodynamic chord | 24.384 | m |
| wing string length | 18.288 | m |
| sweep angle | 75.97 | deg |
| rudder chord length | 6.9494 | m |
| Variable | Intial Value | Unit |
|---|---|---|
| velocity | m/s | |
| height | 22,000 | m |
| pitch angle | deg | |
| yaw angle | deg | |
| roll angle | deg | |
| angular rate | deg/s |
| Parameter Variable | Value | Parameter Variable | Value |
|---|---|---|---|
| 2 | 1 | ||
| diag | 1 | ||
| diag | 0.01 | ||
| 2 | |||
| 1 | diag | ||
| b | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Shao, G.; Yang, Q.; Yu, L.; Yao, Y.; Tu, S. Adaptive Robust Tracking Control for Near Space Vehicles with Multi-Source Disturbances and Input–Output Constraints. Actuators 2022, 11, 273. https://doi.org/10.3390/act11100273
Yan X, Shao G, Yang Q, Yu L, Yao Y, Tu S. Adaptive Robust Tracking Control for Near Space Vehicles with Multi-Source Disturbances and Input–Output Constraints. Actuators. 2022; 11(10):273. https://doi.org/10.3390/act11100273
Chicago/Turabian StyleYan, Xiaohui, Guiwei Shao, Qingyun Yang, Liang Yu, Yuwu Yao, and Shengxia Tu. 2022. "Adaptive Robust Tracking Control for Near Space Vehicles with Multi-Source Disturbances and Input–Output Constraints" Actuators 11, no. 10: 273. https://doi.org/10.3390/act11100273
APA StyleYan, X., Shao, G., Yang, Q., Yu, L., Yao, Y., & Tu, S. (2022). Adaptive Robust Tracking Control for Near Space Vehicles with Multi-Source Disturbances and Input–Output Constraints. Actuators, 11(10), 273. https://doi.org/10.3390/act11100273