
An Adaptive Dynamic Surface Technology-Based Electromechanical Actuator Fault-Tolerant Scheme for Blair Mine Hoist Wire Rope Tension Control System

 ,
,
Abstract
:1. Introduction
2. Mathematical Model of Blair Mine Hoist
2.1. Wire Rope Tension Control Model
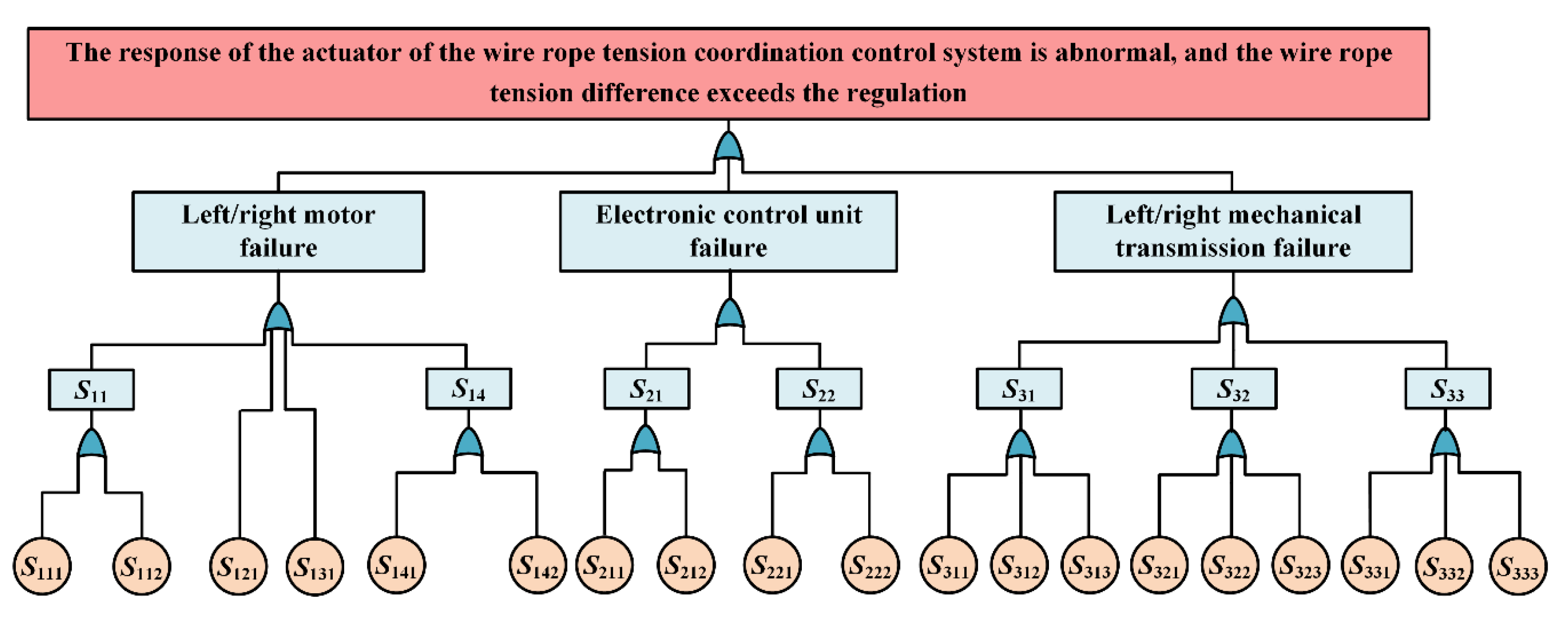
2.2. Problem Formulation of Actuator Fault
3. Adaptive Actuator Fault-Tolerant Controller Design
3.1. The Adaptive Actuator Fault Observer
3.2. The Improved Dynamic Surface Technology-Based Fault-Tolerant Controller
- (1)
- According to the failure status of the hoisting system and the fault indicator (i = 1, 2) in Equation (27), define fuzzy sets
- (2)
- Utilize the following fuzzy rules’ construct control distribution factors .: IF is , and is THEN is
- (1)
- Use the product inference engine to solve the premise inference results of the rules ;
- (2)
- Take the central value of as ;
- (3)
- Let be a free parameter and write to the set using a product inference engine and a central average defuzzifier; the control allocation factor can finally be written aswhere is , the dimensional vector, whose -th element can be expressed as
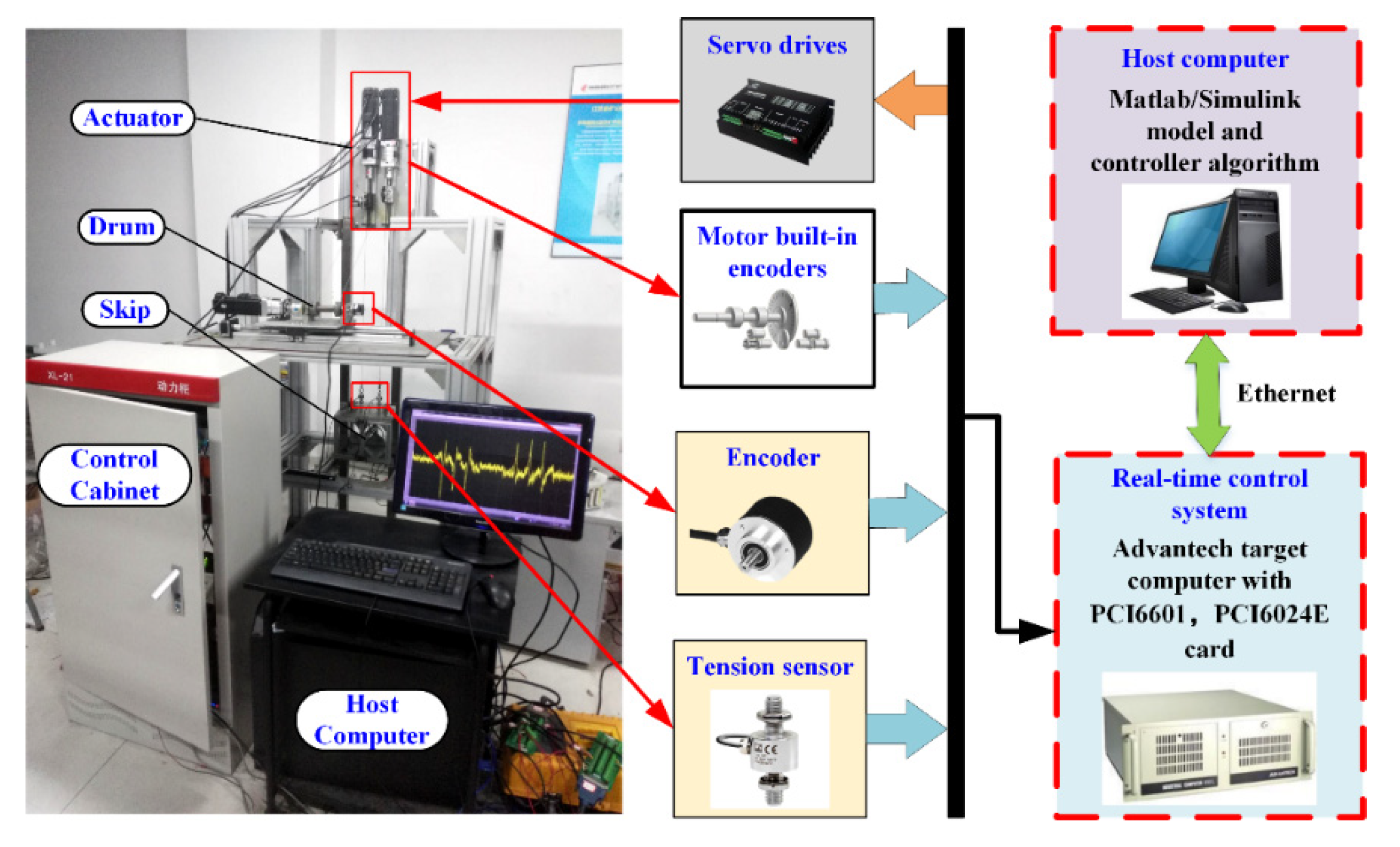
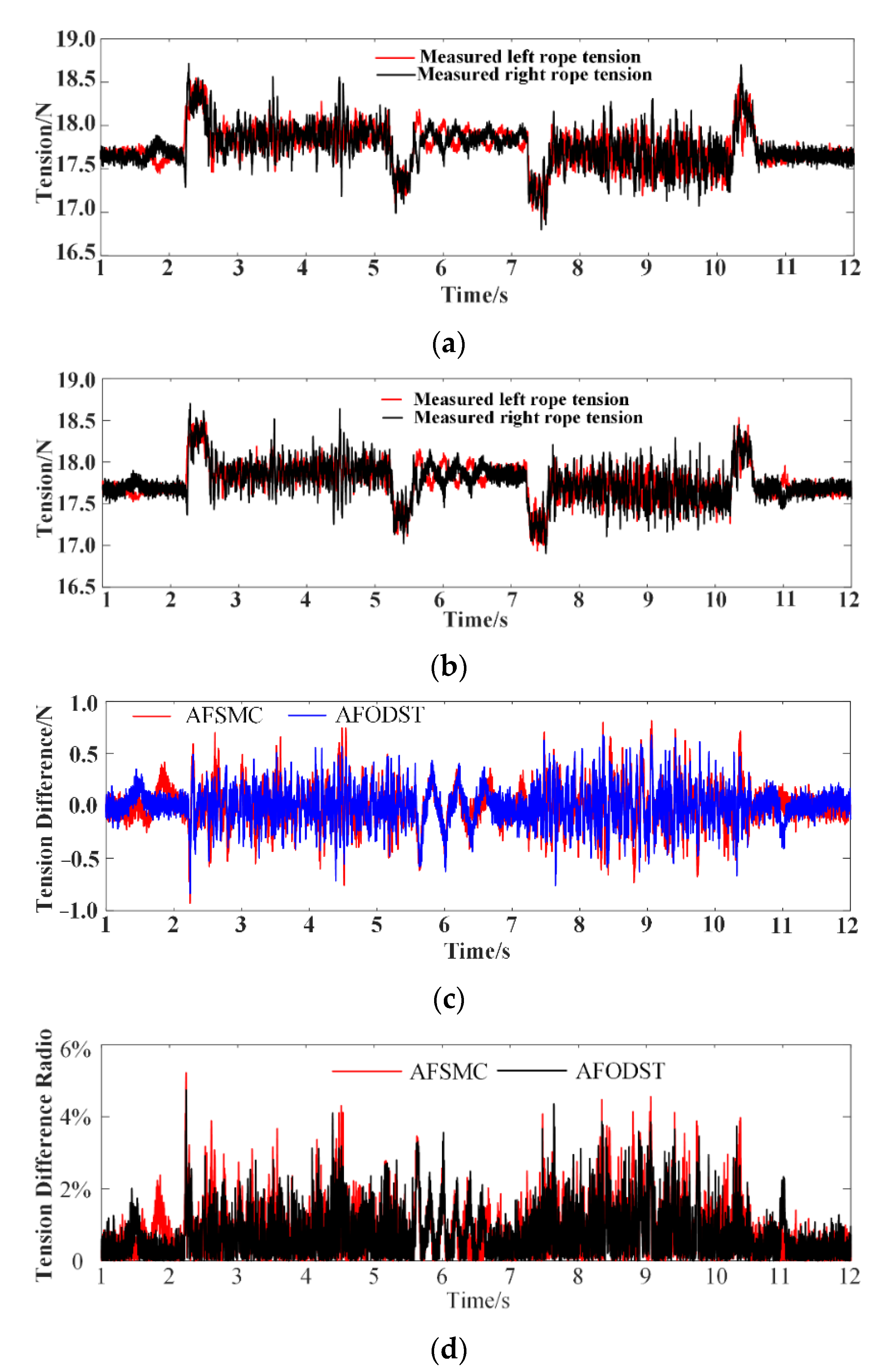
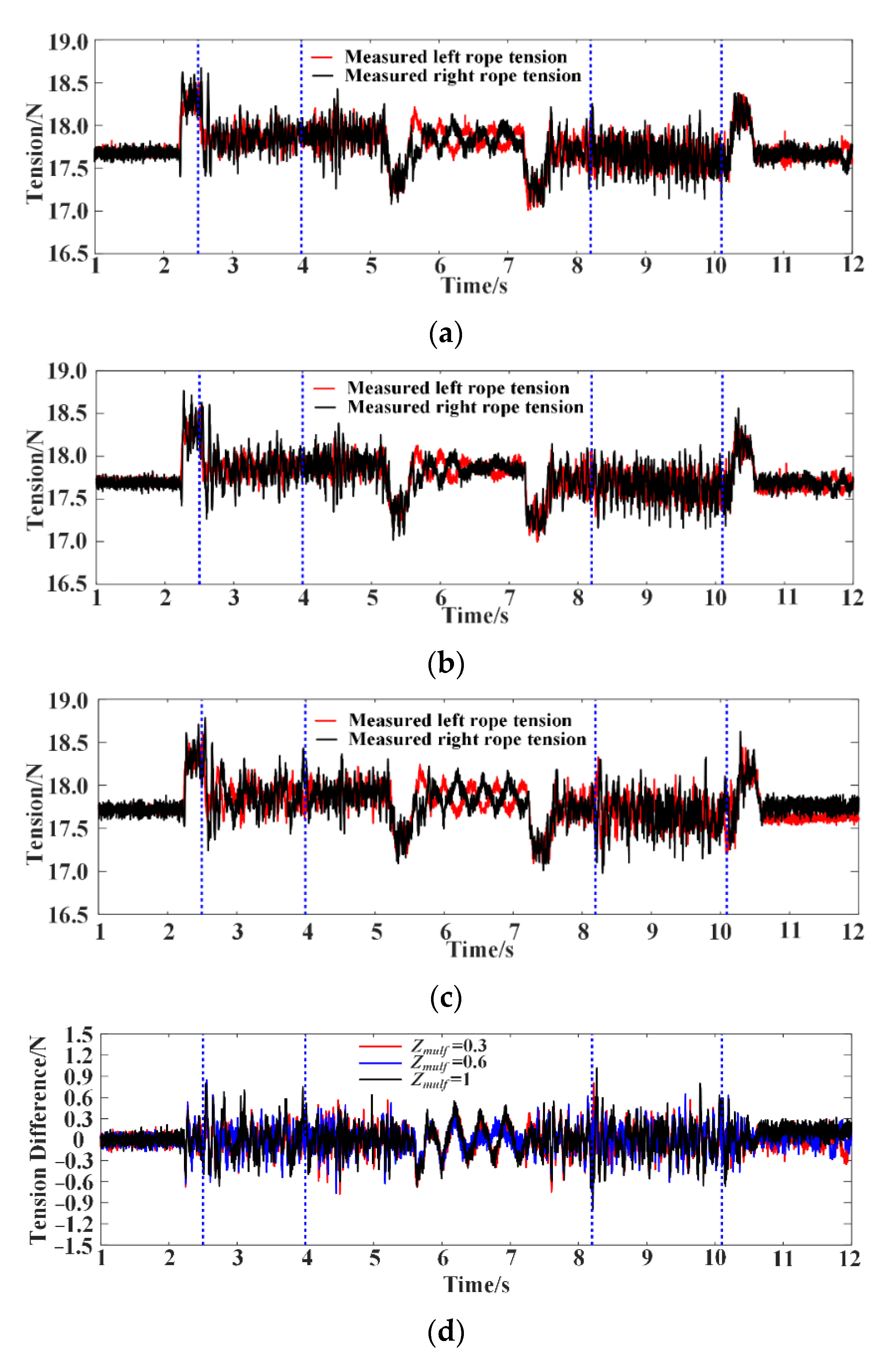
4. Experiment Result and Analysis
- (1)
- AFSMC: This is the adaptive fuzzy sliding mode controller with a fuzzy smooth switching item as discussed in [48]. The tension coordination control loop applies an improved sliding mode algorithm to overcome the interference, and the actuator control loop employs the traditional proportion-integration-differentiation (PID) algorithm. The input voltage amplitude of the left side actuator is equal to the right side actuator, and the symbols of the two side inputs are opposite. The gains of the controller are chosen as: , , , , , .
- (2)
- AFODST: This is the adaptive fault observer (12) and dynamic surface technology-based fault tolerant controller (43) proposed in this paper according to the theoretical design procedure. The parameters of the actuator fault observer are obtained by using the LMI toolbox to solve according to formula (15). The final gains are: , , , , , = = = = 3, = = = = 5. In addition, the gains of the improved dynamic surface fault-tolerant controller are chosen as: , , , , , , , , , , , , .
5. Conclusions
- (1)
- According to the actuator fault analysis and dynamic characteristic analysis of the mine hoist tension coordination control system, the overall mathematic model of the system includes the hoisting subsystem, skip subsystem, electric drive actuators, and the electromechanical actuator fault is built and expressed with a state space formulation.
- (2)
- In order to solve the tension coordination control problem under fault conditions, the RBF neural-network-based adaptive observer is applied to estimate the electromechanical actuator fault state. The hybrid method consists of the adaptive dynamic surface controller, fuzzy allocation factor, and the error barrier function is developed to achieve a better real-time control effect dealing with the sudden fault situation and unexpected disturbance. Each step of this algorithm is explicitly presented, and the stability of the tension coordination closed-loop control system is proved.
- (3)
- Through the simulated actuator faults’ experimental test, the proposed hybrid strategy shows stronger robustness and reacts faster when an electromechanical actuator performance loss fault occurs. Even when one of the actuators fails completely, the designed controller can achieve almost the same performance as the normal operating conditions. Compared with the AFSMC, the RMSE is reduced by 67.83 percent, and the MAE is reduced by 63.78 percent, in the worst setting situation. The validity of the theoretical analysis is thus verified.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Giraud, L.; Galy, B. Fault tree analysis and risk mitigation strategies for mine hoists. Saf. Sci. 2018, 110, 222–234. [Google Scholar] [CrossRef]
- Pi, Y.; Zhang, J.; Tang, X.; Zhu, J. Three-dimensional dynamic modeling and simulation of a multi-cable winding hoister system considering bidirectional coupling between cage and flexible guides. J. Vib. Control 2022. [Google Scholar] [CrossRef]
- Yao, J.; Ma, Y.; Ma, C.; Xiao, X.; Xu, T. Effect of misalignment failures of steel guides on impact responses in friction mine hoisting systems. Eng. Fail. Anal. 2020, 118, 104841. [Google Scholar] [CrossRef]
- Peng, X.; Gong, X.S.; Liu, J.J. The study on crossover layouts of multi-layer winding grooves in deep mine hoists based on transverse vibration characteristics of catenary rope. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 118–132. [Google Scholar] [CrossRef]
- Chang, X.; Peng, Y.; Zhu, Z.; Gong, X.; Yu, Z.; Mi, Z.; Xu, C. Breaking failure analysis and finite element simulation of wear-out winding hoist wire rope. Eng. Fail. Anal. 2019, 95, 1–17. [Google Scholar] [CrossRef]
- Wang, J.; Pi, Y.; Krstic, M. Balancing and suppression of oscillations of tension and cage in dual-cable mining elevators. Automatica 2018, 98, 223–238. [Google Scholar] [CrossRef]
- Zhu, Z.C.; Li, X.; Shen, G.; Zhu, W.D. Wire rope tension control of hoisting systems using a robust nonlinear adaptive backstepping control scheme. ISA Trans. 2018, 72, 256–272. [Google Scholar] [CrossRef]
- Chen, X.; Zhu, Z.C.; Li, W.; Shen, G. Fault-tolerant control of double-rope winding hoists combining neural-based adaptive technique and iterative learning method. IEEE Access 2019, 7, 50476–50491. [Google Scholar] [CrossRef]
- Li, X.; Zhu, Z.; Shen, G.; Tang, Y. Wire Tension Coordination Control of Electro-Hydraulic Servo Driven Double-Rope Winding Hoisting Systems Using a Hybrid Controller Combining the Flatness-Based Control and a Disturbance Observer. Symmetry 2021, 13, 716. [Google Scholar] [CrossRef]
- Ding, X.; Shen, G.; Tang, Y.; Li, X. Axial vibration suppression of wire-ropes and container in double-rope mining hoists with adaptive robust boundary control. Mechatronics 2022, 85, 102817. [Google Scholar] [CrossRef]
- Zang, W.; Shen, G.; Rui, G.; Li, X.; Li, G.; Tang, Y. A flatness-based nonlinear control scheme for wire tension control of hoisting systems. IEEE Access 2019, 7, 146428–146442. [Google Scholar] [CrossRef]
- Wang, J.; Pi, Y.; Hu, Y.; Zhu, Z. State-observer design of a PDE-modeled mining cable elevator with time-varying sensor delays. IEEE Trans. Control Syst. Technol. 2019, 28, 1149–1157. [Google Scholar] [CrossRef]
- Ding, S.X.; Li, L. Control performance monitoring and degradation recovery in automatic control systems: A review, some new results, and future perspectives. Control Eng. Pract. 2021, 111, 104790. [Google Scholar] [CrossRef]
- Shen, Q.; Yue, C.; Goh, C.H.; Wang, D. Active fault-tolerant control system design for spacecraft attitude maneuvers with actuator saturation and faults. IEEE Trans. Ind. Electron. 2018, 66, 3763–3772. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, B.; Wu, Z.G.; Xie, S.; Peng, Y. Adaptive sliding mode fault-tolerant fuzzy tracking control with application to unmanned marine vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 6691–6700. [Google Scholar] [CrossRef]
- Tian, G.; Yuan, G.; Aleksandrov, A.; Zhang, T.; Li, Z.; Fathollahi-Fard, A.M.; Ivanov, M. Recycling of spent Lithium-ion Batteries: A comprehensive review for identification of main challenges and future research trends. Sustain. Energy Technol. Assess. 2022, 53, 102447. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, X.; Liu, X. RBFNN-based nonsingular fast terminal sliding mode control for robotic manipulators including actuator dynamics. Neurocomputing 2019, 362, 72–82. [Google Scholar] [CrossRef]
- Amin, A.A.; Hasan, K.M. A review of fault tolerant control systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Process. 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Başak, H.; Kemer, E.; Prempain, E. A passive fault-tolerant switched control approach for linear multivariable systems: Application to a quadcopter unmanned aerial vehicle model. J. Dyn. Syst. Meas. Control 2020, 142, 031004. [Google Scholar] [CrossRef]
- Hu, C.; Wei, X.; Ren, Y. Passive fault-tolerant control based on weighted LPV tube-MPC for air-breathing hypersonic vehicles. Int. J. Control Autom. Syst. 2019, 17, 1957–1970. [Google Scholar] [CrossRef]
- Hao, L.Y.; Zhang, H.; Li, T.S.; Lin, B.; Chen, C.L.P. Fault tolerant control for dynamic positioning of unmanned marine vehicles based on TS fuzzy model with unknown membership functions. IEEE Trans. Veh. Technol. 2021, 70, 146–157. [Google Scholar] [CrossRef]
- Aydin, M.N.; Coban, R. PID sliding surface-based adaptive dynamic second-order fault-tolerant sliding mode control design and experimental application to an electromechanical system. Int. J. Control 2022, 95, 1767–1776. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A survey on active fault-tolerant control systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S. A deep learning based data-driven thruster fault diagnosis approach for satellite attitude control system. IEEE Trans. Ind. Electron. 2020, 68, 10162–10170. [Google Scholar] [CrossRef]
- Rudin, K.; Ducard GJ, J.; Siegwart, R.Y. Active fault-tolerant control with imperfect fault detection information: Applications to UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2792–2805. [Google Scholar] [CrossRef]
- Abbaspour, A.; Yen, K.K.; Forouzannezhad, P.; Sargolzaei, A. A neural adaptive approach for active fault-tolerant control design in UAV. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3401–3411. [Google Scholar] [CrossRef]
- Xiong, H.; Liao, Y.; Chu, X.; Nian, X.; Wang, H. Observer based fault tolerant control for a class of Two-PMSMs systems. ISA Trans. 2018, 80, 99–110. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.-C.; Tran, X.-T.; Kang, H.-J. A Novel High-Speed Third-Order Sliding Mode Observer for Fault-Tolerant Control Problem of Robot Manipulators. Actuators 2022, 11, 259. [Google Scholar] [CrossRef]
- Han, J.; Liu, X.; Wei, X.; Sun, S. A dynamic proportional-integral observer-based nonlinear fault-tolerant controller design for nonlinear system with partially unknown dynamic. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 5092–5104. [Google Scholar] [CrossRef]
- Lei, Q.; Ma, Y.; Liu, J.; Yu, J. Neuroadaptive observer-based discrete-time command filtered fault-tolerant control for induction motors with load disturbances. Neurocomputing 2021, 423, 435–443. [Google Scholar] [CrossRef]
- Truong, H.V.A.; Ahn, K.K. Actuator failure compensation-based command filtered control of electro-hydraulic system with position constraint. ISA Trans. 2022. [Google Scholar] [CrossRef]
- Li, L.; Yao, L.; Wang, H.; Gao, Z. Iterative learning fault diagnosis and fault tolerant control for stochastic repetitive systems with Brownian motion. ISA Trans. 2022, 121, 171–179. [Google Scholar] [CrossRef]
- Chen, X.; Zhu, Z.-C.; Ma, T.-B.; Shen, G. Model-based sensor fault detection, isolation and tolerant control for a mine hoist. Meas. Control 2022, 55, 274–287. [Google Scholar] [CrossRef]
- Guzmán-Rabasa, J.A.; López-Estrada, F.R.; González-Contreras, B.M.; Valencia-Palomo, G.; Chadli, M.; Pérez-Patricio, M. Actuator fault detection and isolation on a quadrotor unmanned aerial vehicle modeled as a linear parameter-varying system. Meas. Control 2019, 52, 1228–1239. [Google Scholar] [CrossRef] [Green Version]
- Mao, Z.; Yan, X.G.; Jiang, B.; Chen, M. Adaptive fault-tolerant sliding-mode control for high-speed trains with actuator faults and uncertainties. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2449–2460. [Google Scholar] [CrossRef] [Green Version]
- Shiravani, F.; Alkorta, P.; Cortajarena, J.A.; Barambones, O. An Enhanced Sliding Mode Speed Control for Induction Motor Drives. Actuators 2022, 11, 18. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, N.; Liu, Y.; Zhao, X. Adaptive fault-tolerant control for switched nonlinear systems based on command filter technique. Appl. Math. Comput. 2021, 392, 125725. [Google Scholar] [CrossRef]
- Zhao, Z.; Ren, Y.; Mu, C.; Zou, T.; Hong, K.-S. Adaptive neural-network-based fault-tolerant control for a flexible string with composite disturbance observer and input constraints. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Huang, J.; Cao, Y.; Xiong, C.; Zhang, H.-T. An echo state Gaussian process-based nonlinear model predictive control for pneumatic muscle actuators. IEEE Trans. Autom. Sci. Eng. 2018, 16, 1071–1084. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, D.; Zhang, X.; Wang, S.; Ma, W. Experimental study on the nonlinear dynamic characteristics of wire rope under periodic excitation in a friction hoist. Shock Vib. 2020, 2020, 8506016. [Google Scholar] [CrossRef] [Green Version]
- Chaoui, H.; Khayamy, M.; Okoye, O. Adaptive RBF network based direct voltage control for interior PMSM based vehicles. IEEE Trans. Veh. Technol. 2018, 67, 5740–5749. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T.C. A review of electromechanical actuators for More/All Electric aircraft systems. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2018, 232, 4128–4151. [Google Scholar] [CrossRef] [Green Version]
- Smaeilzadeh, S.M.; Golestani, M. A finite-time adaptive robust control for a spacecraft attitude control considering actuator fault and saturation with reduced steady-state error. Trans. Inst. Meas. Control 2019, 41, 1002–1009. [Google Scholar] [CrossRef]
- Costa, T.V.; Sencio, R.R.; Oliveira-Lopes, L.C.; Silva, F.V. Fault-tolerant control by means of moving horizon virtual actuators: Concepts and experimental investigation. Control Eng. Pract. 2021, 107, 104683. [Google Scholar] [CrossRef]
- Edalati, L.; Sedigh, A.K.; Shooredeli, M.A.; Moarefianpour, A. Adaptive fuzzy dynamic surface control of nonlinear systems with input saturation and time-varying output constraints. Mech. Syst. Signal Process. 2018, 100, 311–329. [Google Scholar] [CrossRef]
- Li, X.; Zhu, Z.C.; Shen, G. A switching-type controller for wire rope tension coordination of electro-hydraulic-controlled double-rope winding hoisting systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 1126–1144. [Google Scholar] [CrossRef]
- Chen, X.; Zhu, Z.; Shen, G.; Li, W. Tension coordination control of double-rope winding hoisting system using hybrid learning control scheme. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 1265–1281. [Google Scholar] [CrossRef]
- Huang, J.; Luo, C.; Yu, P.; Hao, H. A methodology for calculating limit deceleration of flexible hoisting system: A case study of mine hoist. Proc. Inst. Mech. Eng. Part E Ournal Process Mech. Eng. 2020, 234, 342–352. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event ID | Event | Event ID | Event |
|---|---|---|---|
| S11 | Motor Winding Failure | S222 | Board Circuit Failure |
| S111 | Winding Short Circuit | S31 | Gear Failure |
| S112 | Winding Open Circuit | S311 | Gear Surface Wear |
| S121 | Rotor Eccentricity | S312 | Gear Teeth Broken |
| S131 | Unstable Supply Voltage | S313 | Gear Teeth Deformation |
| S14 | Motor Sensor Failure | S32 | Bearing Failure |
| S141 | Encoder Failure | S321 | Structure Plastic Deformation |
| S142 | Current Sensor Failure | S322 | Surface Cracking and Spalling |
| S21 | Cable Failure | S323 | Surface Corrosion |
| S211 | Cable Open Circuit | S33 | Screw Mechanism Failure |
| S212 | Cable Short Circuit | S331 | Guide Wear |
| S22 | Control Board Failure | S332 | Screw Wear |
| S221 | Board Loose | S333 | Screw Deformation |
| Controller | RMSE | MAE | RMSE | MAE |
|---|---|---|---|---|
| Condition 1—No faults | Condition 2—zaddf = 0.1, zmulf = 0.3 | |||
| AFSMC | 20.062 | 0.927 | 22.858 | 0.997 |
| AFODST | 18.171 | 0.833 | 18.239 | 0.803 |
| Condition 3—zaddf = 0.1, zmulf = 0.6 | Condition 4—zaddf = 0.1, zmulf = 1 | |||
| AFSMC | 27.374 | 1.180 | 66.527 | 2.802 |
| AFODST | 17.938 | 0.847 | 21.399 | 1.015 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhu, Z.; Ma, T.; Chang, J.; Chang, X.; Zang, W. An Adaptive Dynamic Surface Technology-Based Electromechanical Actuator Fault-Tolerant Scheme for Blair Mine Hoist Wire Rope Tension Control System. Actuators 2022, 11, 299. https://doi.org/10.3390/act11100299
Chen X, Zhu Z, Ma T, Chang J, Chang X, Zang W. An Adaptive Dynamic Surface Technology-Based Electromechanical Actuator Fault-Tolerant Scheme for Blair Mine Hoist Wire Rope Tension Control System. Actuators. 2022; 11(10):299. https://doi.org/10.3390/act11100299
Chicago/Turabian StyleChen, Xiao, Zhencai Zhu, Tianbing Ma, Jucai Chang, Xiangdong Chang, and Wanshun Zang. 2022. "An Adaptive Dynamic Surface Technology-Based Electromechanical Actuator Fault-Tolerant Scheme for Blair Mine Hoist Wire Rope Tension Control System" Actuators 11, no. 10: 299. https://doi.org/10.3390/act11100299
APA StyleChen, X., Zhu, Z., Ma, T., Chang, J., Chang, X., & Zang, W. (2022). An Adaptive Dynamic Surface Technology-Based Electromechanical Actuator Fault-Tolerant Scheme for Blair Mine Hoist Wire Rope Tension Control System. Actuators, 11(10), 299. https://doi.org/10.3390/act11100299