
Lightweight Dual-Mode Soft Actuator Fabricated from Bellows and Foam Material


Abstract
:1. Introduction
2. Materials and Methods
2.1. Compressive Properties of Foam Materials
2.2. Structural Design of the Actuators
2.3. Fabrication of the Actuators
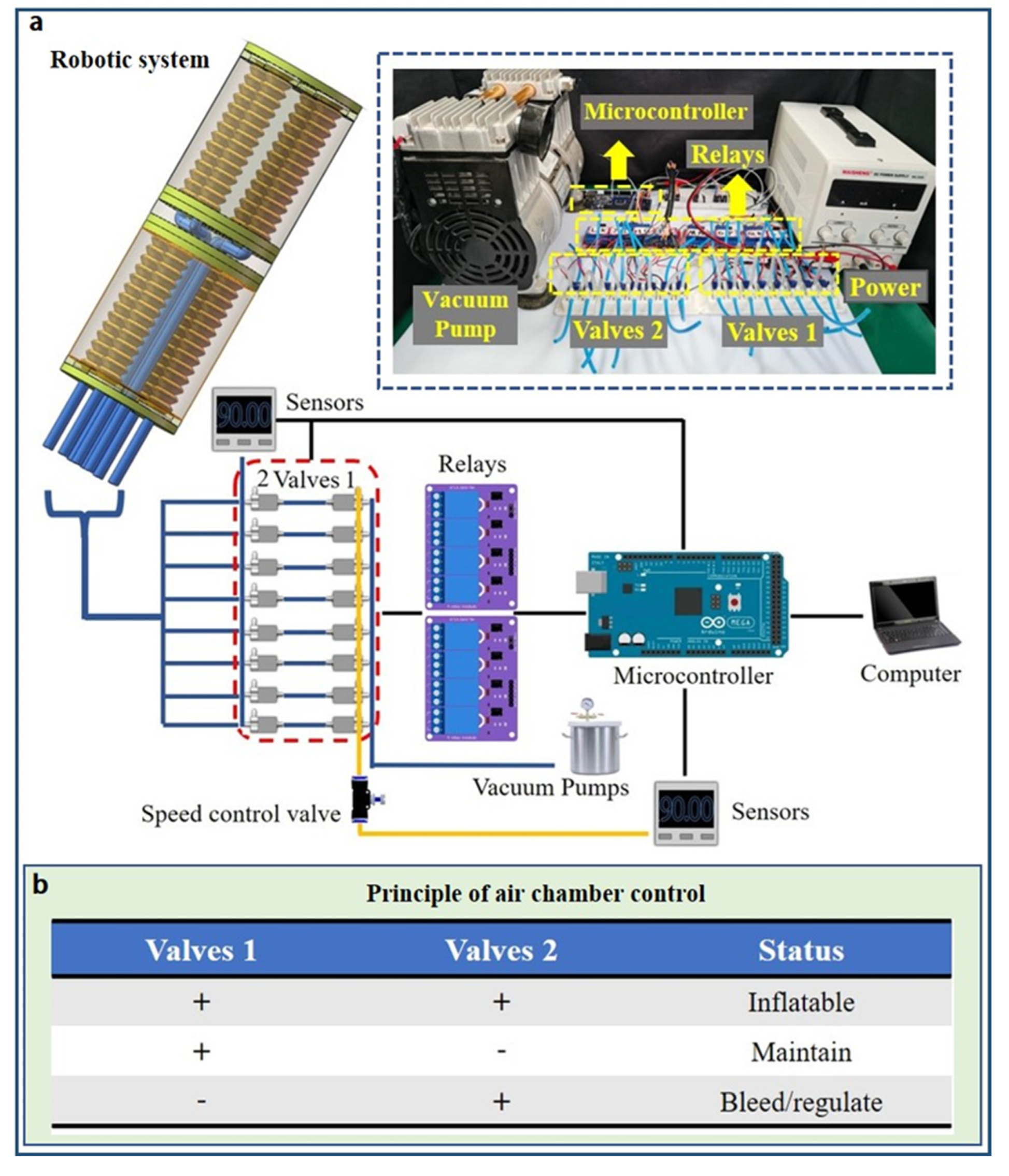
- Bellows air chambers: The thin-walled PU bellows was selected from commercially available drink straw and cut into the required number of sections. Two small rings are used to pass through the first and last ends of the bellows, and a solder glue (WJ-106S, WEIJISEN, Huizhou, China) is applied to the inside of the end cap and fits into the small ring to achieve bonding with the bellows. The small rings and end caps were made of polylactic acid and fabricated by Fused Deposition Modelling (I-A, CoLiDo 1.0, PRINT-RITE, Zhuhai, China);
- Sealing layer: The A and B components of the thermosetting PU were mixed uniformly at a ratio of 1:1. The inner two sealing layers were obtained by combining the four air chambers with the upper and lower two molds (II-A, made of photosensitive resin and fabricated by Digital Light Processing: Form3, formlabs, Engitype, Gig Harbor, WA, USA) and then casting and demolding. The preparation of the sealing layers is completed one at a time. After the first sealing layer is casted and demolded, the whole is turned over and another sealing layer is prepared in the same way. The outer two sealing layers were casted and demolded separately. Trim the edges of each sealing layer after demolding to ensure sealing. The outer two sealing layers were bonded individually to the inner sealing layer by applying thermosetting PU to the sealing layer surface to complete the actuator skeleton;
- Foam: A hollow cylindrical foam body was wrapped around the air chambers, and the tops of the four air chambers were connected to the airway. Specifically, the actuator skeleton obtained in the second part was combined with the top, bottom, left, right, and occupancy mandrel five molds (III-A, made of polylactic acid and fabricated by Fused Deposition Modelling: CoLiDo 1.0, PRINT-RITE, Zhuhai, China) to form a cylinder. The foaming liquid was poured into the square hole reserved in the upper mold. The foaming was allowed to complete before the mold was cooled. The whole process lasted about 20 min.
3. Experimental
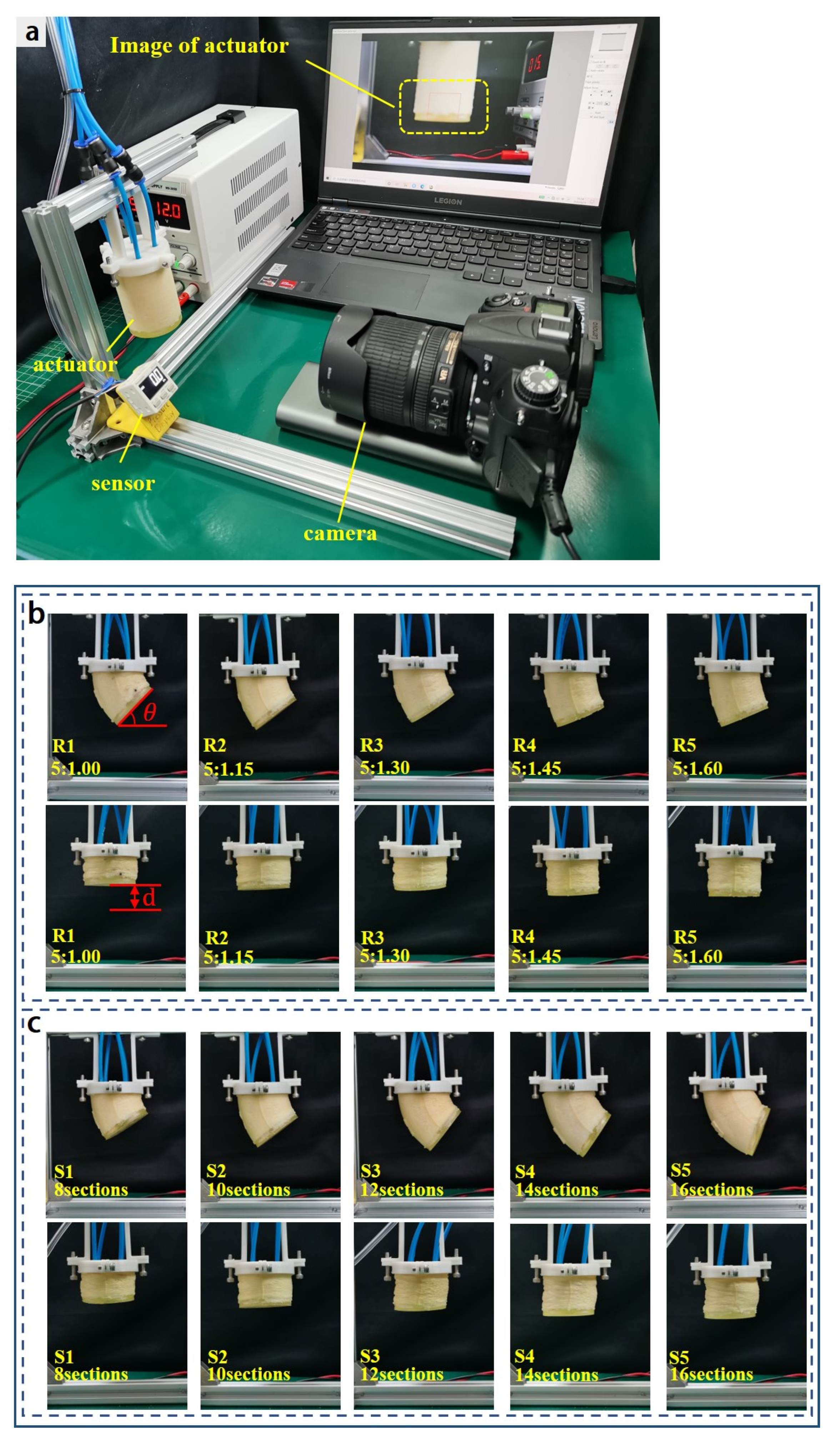
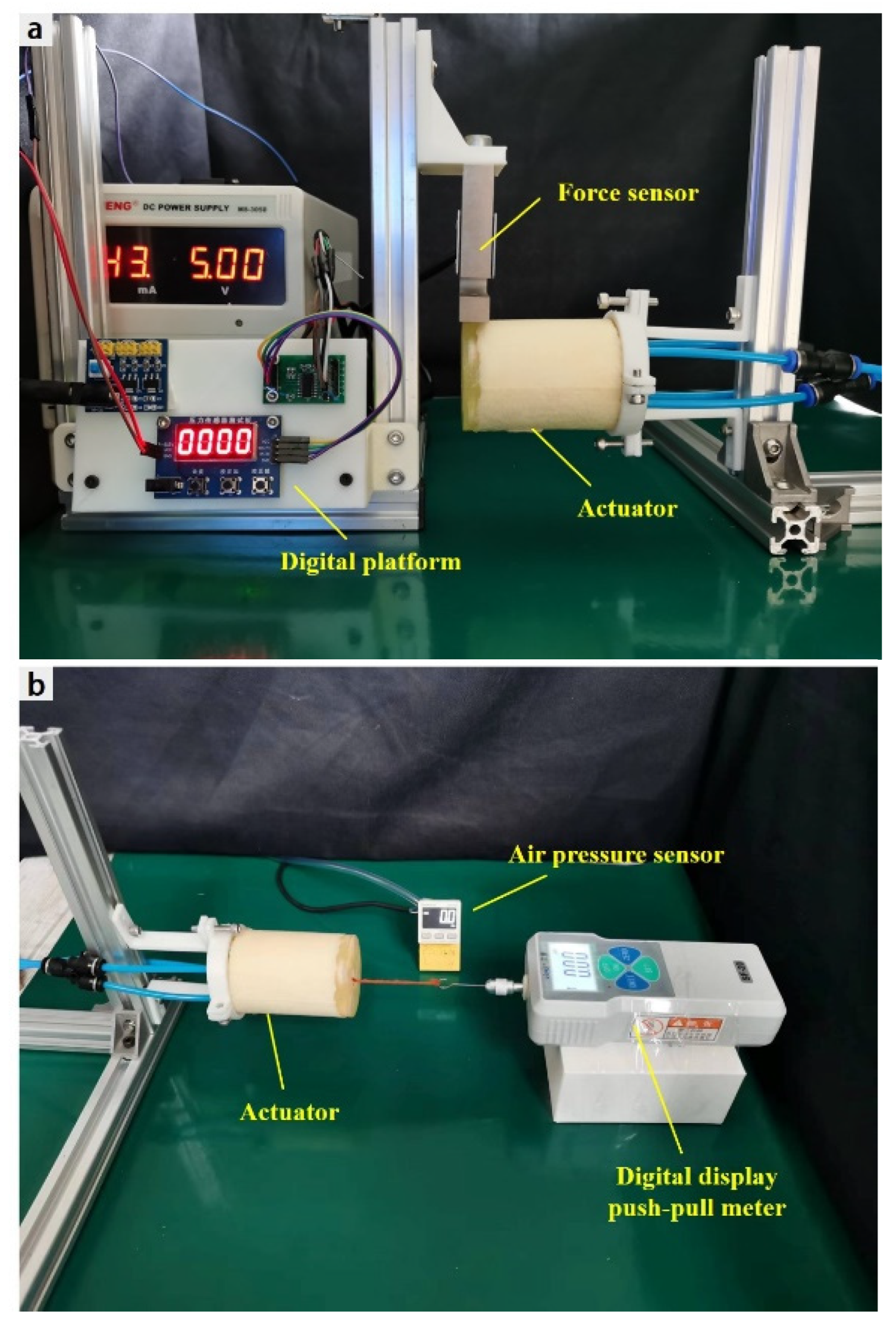
3.1. Motion and out Force Characterization
3.2. Practical Application
4. Result
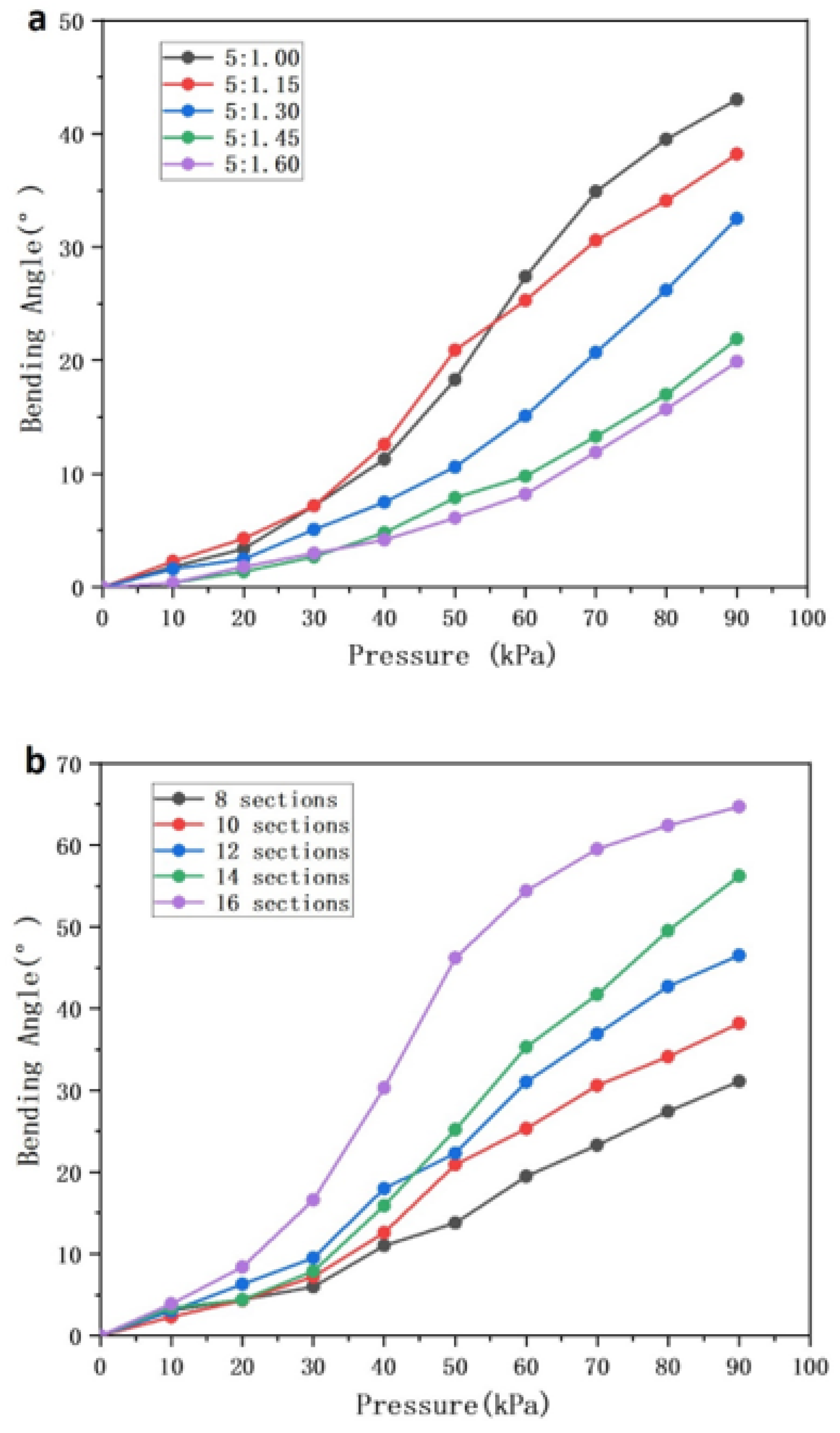
4.1. Motion and Output Force Characteristics
4.2. Practical Application
4.2.1. Lifting Experiment
4.2.2. Gripping Experiment
4.2.3. Quadruped-Like Soft Robot
4.2.4. Claw-Like Soft Robot
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hsiao, J.; Chang, J.; Cheng, C. Soft Medical Robotics: Clinical and Biomedical Applications, Challenges, and Future Directions. Adv. Robot. 2019, 33, 1099–1111. [Google Scholar] [CrossRef]
- Diodato, A.; Brancadoro, M.; Rossi, G.D. Soft Robotic Manipulator for Improving Dexterity in Minimally Invasive Surgery. Surg. Innov. 2018, 1, 69–76. [Google Scholar] [CrossRef]
- Payne, C.J.; Wamala, I.; Abah, C.; Thalhofer, T.; Saeed, M.; Salinas, D.B.; Horvath, M.A.; Vasilyev, N.V.; Roche, E.T.; Pigula, F.A.; et al. An Implantable Extracardiac Soft Robotic Device for the Failing Heart: Mechanical Coupling and Synchronization. Soft Robot. 2017, 4, 24–250. [Google Scholar] [CrossRef] [PubMed]
- Manfredi, L.; Capoccia, E.; Ciuti, G.; Cuschieri, A. A Soft Pneumatic Inchworm Double balloon (SPID) for colonoscopy. Sci. Rep. 2019, 9, 11109. [Google Scholar] [CrossRef] [PubMed]
- der Maur, P.A.; Djambazi, B.; Haberthür, Y.; Hörmann, P.; Kübler, A.; Lustenberger, M.; Sigrist, S.; Vigen, O.; Förster, J.; Achermann, F.; et al. RoBoa: Construction and Evaluation of a Steerable Vine Robot for Search and Rescue Applications. In Proceedings of the 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 12–16 April 2021; pp. 15–20. [Google Scholar]
- Wang, X.; Zhang, Q.; Shen, D.; Chen, J. A Novel Rescue Robot: Hybrid Soft and Rigid Structures for Narrow Space Searching. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2207–2213. [Google Scholar]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Fan, Y.; Yang, P.; Cao, T.; Liao, H. Worm-Like Soft Robot for Complicated Tubular Environments. Soft Robot. 2019, 6, 399–413. [Google Scholar] [CrossRef]
- Kim, W.; BYUN, j.; Kim, J.; Chol, W.; Jakobsen, K.; Jakobsen, J.; Lee, D.; Cho, K. Bioinspired dual-morphing stretchable origami. Sci. Robot. 2019, 4, eaay3493. [Google Scholar] [CrossRef]
- Argiolas, A.; Mac Murray, B.; Meerbeek, I.; Whitehead, J.; Whitehead, E.; Mazzolai, B.; Shepherd, R. Sculpting Soft Machines. Soft Robot. 2016, 3, 101–108. [Google Scholar] [CrossRef]
- Yamada, Y. Feasibility Study on Botanical Robotics: Ophiocordyceps-like Biodegradable Laminated Foam-Based Soft Actuators With Germination Ability. IEEE Robot. Autom. Lett. 2021, 6, 3777–3784. [Google Scholar] [CrossRef]
- Bern, J.; Kumagai, G.; Coros, S. Fabrication, modeling, and control of plush robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3739–3746. [Google Scholar]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.W.; Kim, H.C.; Zhai, L.; Ko, H.; Muthoka, R. Review of Soft Actuator Materials. Int. J. Precis. Eng. Manuf. 2019, 20, 2221–2241. [Google Scholar] [CrossRef]
- Schmitt, F.; Piccin, O.; Barbé, L.; Bayle, B. Soft Robots Manufacturing: A Review. Front. Robot. AI 2018, 5, 84. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst. 2020, 2, 2000128. [Google Scholar] [CrossRef]
- Fei, Y.; Wang, J.; Pang, W. A Novel Fabric-Based Versatile and Stiffness-Tunable Soft Gripper Integrating Soft Pneumatic Fingers and Wrist. Soft Robot. 2019, 6, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Hao, Y.; Liu, Z.; Liu, J.; Fang, X.; Fang, B.; Nie, S.; Guan, Y.; Sun, F.; Wang, T.; Wen, L. A soft gripper with programmable effective length, tactile and curvature sensory feedback. Smart Mater. Struct. 2020, 29, 035006. [Google Scholar] [CrossRef]
- Heung, K.; Tong, R.; Lau, A.; Li, Z. Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living. Soft Robot. 2019, 6, 289–304. [Google Scholar] [CrossRef]
- Lessard, S.; Pansodtee, P.; Robbins, A.; Trombadore, J.M.; Kurniawan, S.; Teodorescu, M. A Soft Exosuit for Flexible Upper-Extremity Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1604–1617. [Google Scholar] [CrossRef]
- Guan, Q.; Sun, J.; Liu, Y.; Wereley, N.M.; Leng, J. Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk. Soft Robot. 2020, 7, 597–614. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Nefti-Meziani, S.; Theodoridis, T.; Davis, S. The Design and Mathematical Model of a Novel Variable Stiffness Extensor-Contractor Pneumatic Artificial Muscle. Soft Robot. 2018, 5, 576–591. [Google Scholar] [CrossRef]
- Kastor, N.; Mukherjee, R.; Cohen, E.; Vikas, V.; Trimmer, B.; White, R. Design and Manufacturing of Tendon-Driven Soft Foam Robots. Robotica 2020, 38, 88–105. [Google Scholar] [CrossRef]
- Donatelli, C.M.; Serlin, Z.T.; Echols-Jones, P.; Scibelli, A.E.; Cohen, A.; Jeanne-Marie, C.; Rozen-Levy, S.; Buckingham, D.; White, R.; Trimmer, B.A. Soft foam robot with caterpillar-inspired gait regimes for terrestrial locomotion. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 476–481. [Google Scholar]
- King, J.P.; Bauer, D.; Schlagenhauf, C.; Chang, K.; Moro, D.; Pollard, N.; Coros, S. Design, Fabrication, and Evaluation of Tendon-Driven Multi-Fingered Foam Hands. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 1–9. [Google Scholar]
- Somm, L.; Hahn, D.; Kumar, N.; Coros, S. Expanding Foam as the Material for Fabrication, Prototyping and Experimental Assessment of Low-Cost Soft Robots With Embedded Sensing. IEEE Robot. Autom. Lett. (RAL) 2019, 4, 761–768. [Google Scholar] [CrossRef]
- Mac Murray, B.C.; An, X.; Robinson, S.S.; van Meerbeek, I.M.; O’Brien, K.W.; Zhao, H.; Shepherd, R.F. Poroelastic Foams for Simple Fabrication of Complex Soft Robots. Adv. Mater. 2015, 27, 6334–6340. [Google Scholar] [CrossRef]
- Futran, C.C.; Ceron, S.; Mac Murray, B.C.; Shepherd, R.F.; Petersen, K.H. Leveraging fluid resistance in soft robots. In Proceedings of the 2018 IEEE International Conference on Soft Robotics, Livorno, Italy, 24–28 April 2018; pp. 473–478. [Google Scholar]
- Peters, J.; Anvari, B.; Chen, C.; Lim, Z.; Wurdemann, H.A. Hybrid fluidic actuation for a foam-based soft actuator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24–30 October 2020; pp. 8701–8708. [Google Scholar]
- Van Meerbeek, I.M.; Mac Murray, B.C.; Kim, J.W.; Robinson, S.S.; Zou, P.X.; Silberstein, M.N.; Shepherd, R.F. Morphing Metal and Elastomer Bicontinuous Foams for Reversible Stiffness, Shape Memory, and Self-Healing Soft Machines. Adv. Mater. 2016, 28, 2801–2806. [Google Scholar] [CrossRef]
- Robertson, M.A.; Paik, J. New soft robots really suck: Vacuum-powered systems empower diverse capabilities. Sci. Robot. 2017, 2, eaan6357. [Google Scholar] [CrossRef]
- Joe, S.; Totaro, M.; Wang, H.; Beccai, L. Development of the Ultralight Hybrid Pneumatic Artificial Muscle: Modelling and optimization. PLoS ONE 2021, 16, e0250325. [Google Scholar] [CrossRef]
- Alzoubi, M.F.; Al-Hallaj, S.; Abu-Ayyad, M. Modeling of Compression Curves of Flexible Polyurethane Foam with Variable Density, Chemical Formulations and Strain Rates. J. Solid Mech. 2014, 6, 82–97. [Google Scholar]
- Jeong, K.Y.; Cheon, S.S.; Munshi, M.B. A constitutive model for polyurethane foam with strain rate sensitivity. J. Mech. Sci. Technol. 2012, 26, 2033–2038. [Google Scholar] [CrossRef]
- Li, Y. Multi-axial Mechanical Properties Test of Energy-Absorbing Polyurethane Foam. Master’s Thesis, South China University of Technology, Guangzhou, China.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Foaming Multiplier (1/A:B) | Strain Rate v (s−1) | Modulus of Elasticity E (kPa) | Maximum Stress Measured at 80% Strain (kPa) |
|---|---|---|---|
| 5/1.15 | 0.001 | 461.70 | 106.97 |
| 0.01 | 454.00 | 110.29 | |
| 0.1 | 520.94 | 144.53 | |
| 5/1.30 | 0.001 | 551.61 | 119.39 |
| 0.01 | 645.31 | 143.06 | |
| 0.1 | 703.42 | 164.73 | |
| 5/1.50 | 0.001 | 832.70 | 144.35 |
| 0.01 | 967.11 | 175.79 | |
| 0.1 | 993.73 | 182.62 |
| Sample Number | R1 | R2 | R3 | R4 | R5 |
|---|---|---|---|---|---|
| Foaming multiplier (1/A:B) | 5:1.00 | 5:1.15 | 5:1.35 | 5:1.45 | 5:1.60 |
| Sample number | S1 | S2 | S3 | S4 | S5 |
| Number of air chamber sections | 8 | 10 | 12 | 14 | 16 |
| Literature | Material and Driving Method | Deformation Mode | Body Length (mm) | Output Force (N) | Bending Angle (°) | Contraction /Elongation Distance (mm) |
|---|---|---|---|---|---|---|
| This study | PU foam; Negative pressure | Bending; Contraction | 71 | Bending of 3.35 N; Contraction of 7.2 N | 56.2 | 34 |
| Wang et al. [6] | Silicone; Positive pressure | Bending; Elongation | 50 | Bending of 5 N | 47 | 20 |
| Zhang et al. [9] | Silicone; Positive pressure | Bending; Elongation; Expansion | 80 | Extension of 4.5 N | 120 | 9 |
| Peters et al. [30] | PVA foam; Positive pressure and Hydraulic | Elongation | 70 | Extension of 23.14 N | / | 12 |
| Robertson et al. [32] | PU foam; Negative pressure | Bending | 45 | / | 27.3 | / |
| Joe et al. [33] | PU foam; Negative pressure | Contraction | 72 | Contraction of 6.8 N | / | 36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Z.; Zhuang, Z.; Cheng, Y.; Deng, X.; Sun, C.; Yu, Y.; Li, F. Lightweight Dual-Mode Soft Actuator Fabricated from Bellows and Foam Material. Actuators 2022, 11, 245. https://doi.org/10.3390/act11090245
Jiao Z, Zhuang Z, Cheng Y, Deng X, Sun C, Yu Y, Li F. Lightweight Dual-Mode Soft Actuator Fabricated from Bellows and Foam Material. Actuators. 2022; 11(9):245. https://doi.org/10.3390/act11090245
Chicago/Turabian StyleJiao, Zhiwei, Zhongyu Zhuang, Yue Cheng, Xuan Deng, Ce Sun, Yuan Yu, and Fangjun Li. 2022. "Lightweight Dual-Mode Soft Actuator Fabricated from Bellows and Foam Material" Actuators 11, no. 9: 245. https://doi.org/10.3390/act11090245
APA StyleJiao, Z., Zhuang, Z., Cheng, Y., Deng, X., Sun, C., Yu, Y., & Li, F. (2022). Lightweight Dual-Mode Soft Actuator Fabricated from Bellows and Foam Material. Actuators, 11(9), 245. https://doi.org/10.3390/act11090245