
AILC for Rigid-Flexible Coupled Manipulator System in Three-Dimensional Space with Time-Varying Disturbances and Input Constraints

Abstract
:1. Introduction
- (1)
- This paper is the first work regarding the two-link rigid-flexible manipulator system in 3D space by using adaptive iterative learning control. In the controller design section, the adaptive iterative learning control law is designed based on observers.
- (2)
- By designing the composite Lyapunov energy function, combined with Young’s inequality, the convergence of angular error and elastic deformation will be proved strictly.
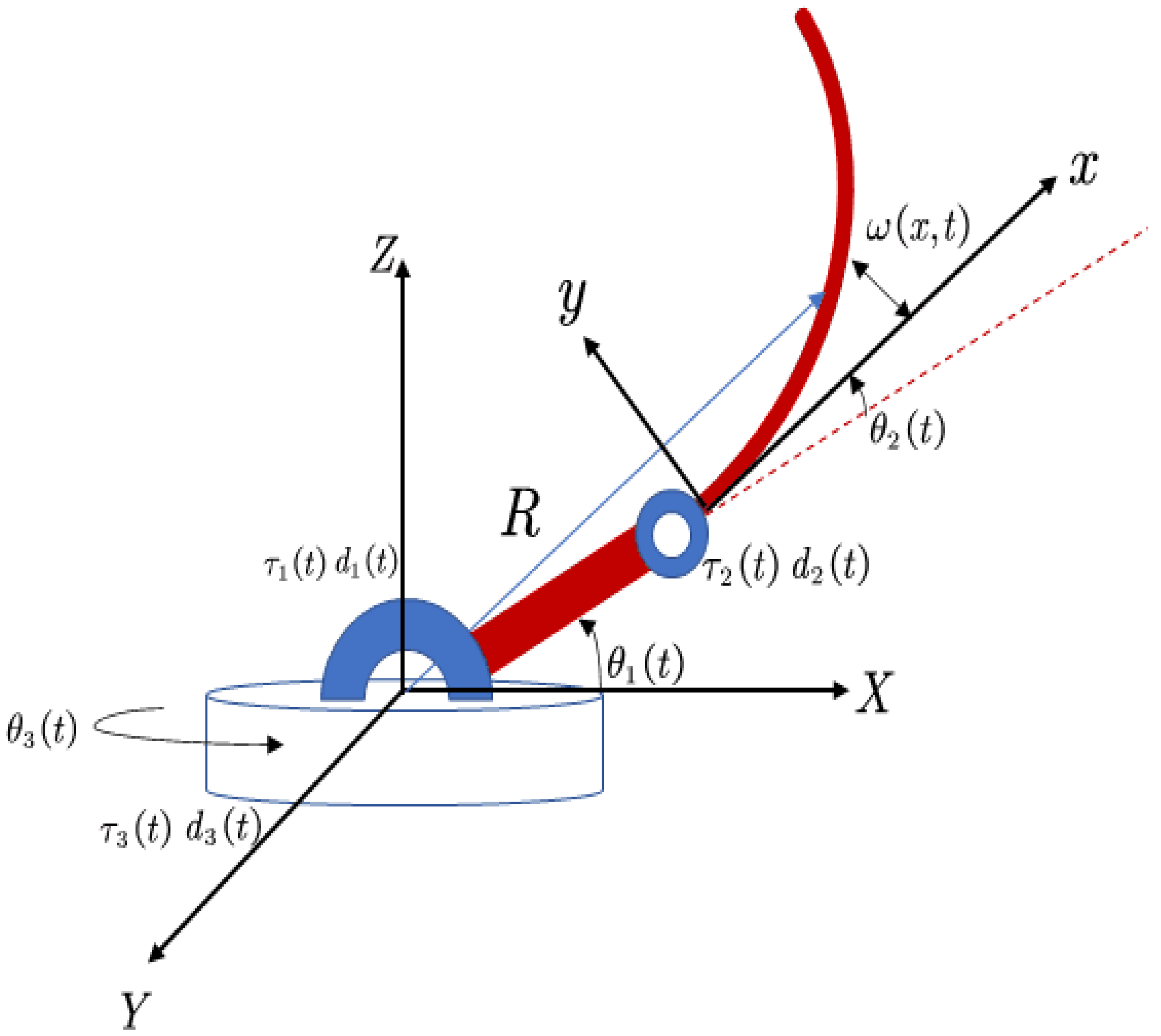
2. System Description and Control Objectives
2.1. System Description
2.2. Control Objectives
3. The Design of Adaptive Iterative Learning Controller and Convergence Analysis
3.1. The Design of Adaptive Iterative Learning Control Law
3.2. Convergence Analysis
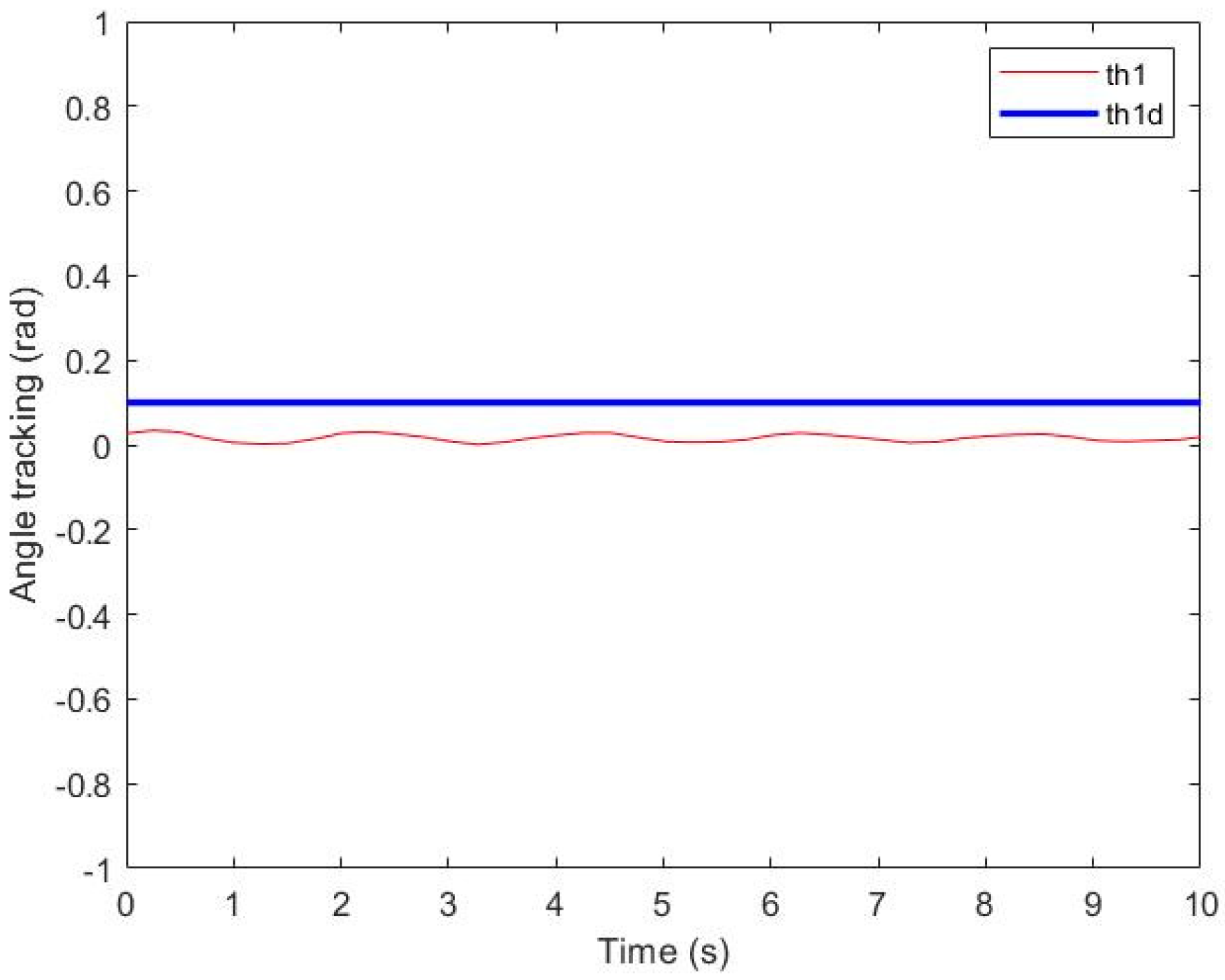
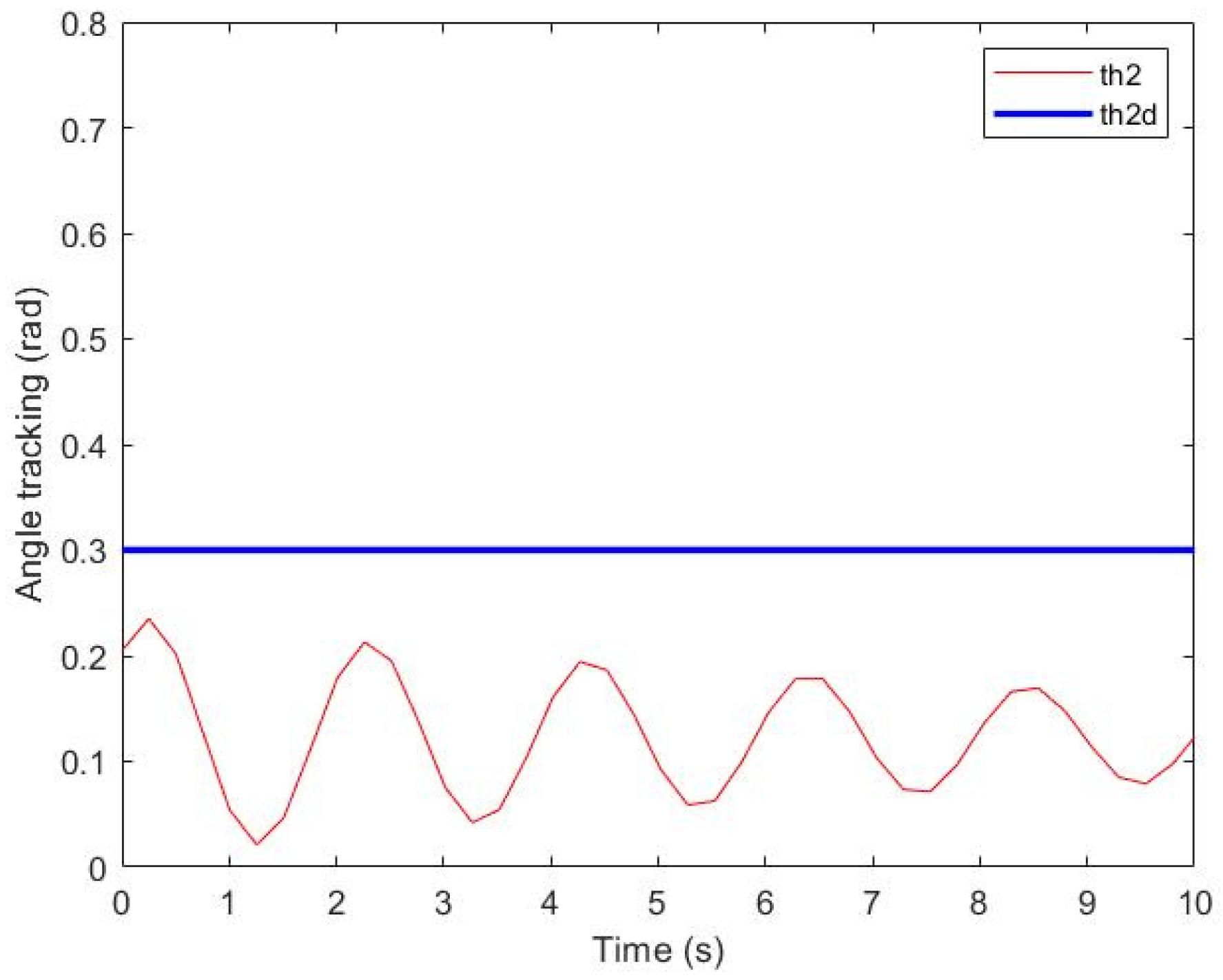
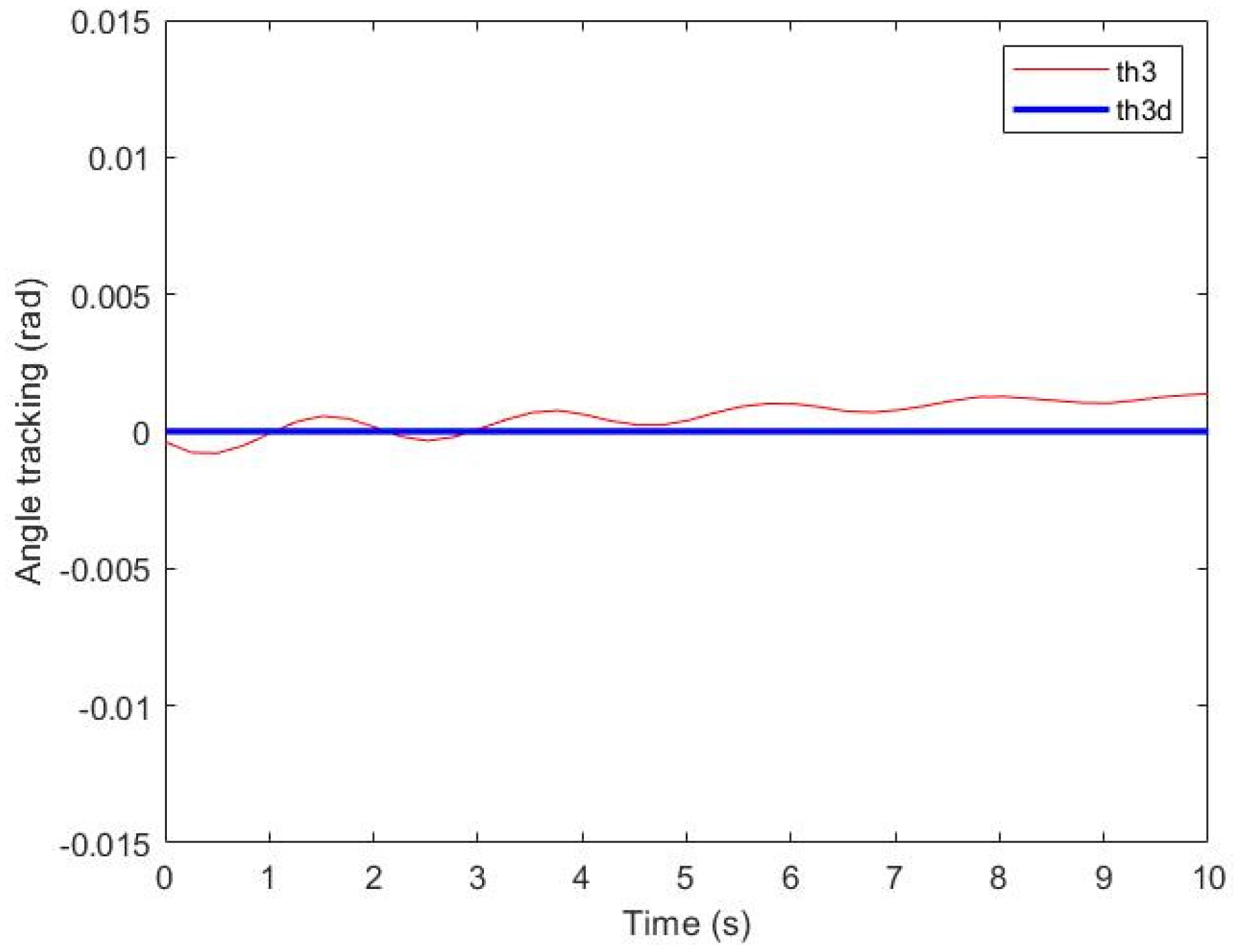
4. Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cao, F.; Liu, J. Vibration control for a rigid-flexible manipulator with full state constraints via Barrier Lyapunov Function. J. Sound Vib. 2017, 406, 237–252. [Google Scholar] [CrossRef]
- He, W.; Meng, T.; Huang, D.; Li, X. Adaptive Boundary Iterative Learning Control for an Euler-Bernoulli Beam System With Input Constraint. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1539–1549. [Google Scholar] [CrossRef] [PubMed]
- He, W.; He, X.; Zou, M.; Li, H. PDE Model-Based Boundary Control Design for a Flexible Robotic Manipulator with Input Backlash. IEEE Trans. Control Syst. Technol. 2018, 27, 790–797. [Google Scholar] [CrossRef]
- Guo, F.; Liu, Y.; Wu, Y.; Luo, F. Observer-based backstepping boundary control for a flexible riser system. Mech. Syst. Signal Process. 2018, 111, 314–330. [Google Scholar] [CrossRef]
- Endo, T.; Sasaki, M.; Matsuno, F.; Jia, Y. Contact-Force Control of a Flexible Timoshenko Arm in Rigid/Soft Environment. IEEE Trans. Autom. Control 2017, 62, 2546–2553. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; He, W. Modeling and vibration control of a flexible aerial refueling hose with variable lengths and input constraint. Automatica 2017, 77, 302–310. [Google Scholar] [CrossRef]
- He, W.; Meng, T.; Zhang, S.; Liu, J.K.; Li, G.; Sun, C. Dual-Loop Adaptive Iterative Learning Control for a Timoshenko Beam with Output Constraint and Input Backlash. IEEE 2019, 49, 1027–1038. [Google Scholar] [CrossRef]
- Yabuno, H.; Kobayashi, S. Motion control of a flexible underactuated manipulator using resonance in a flexible active arm. Int. J. Mech. Sci. 2020, 174, 105432. [Google Scholar] [CrossRef]
- Zhao, Z.; Ahn, C.K. Boundary Output Constrained Control for a Flexible Beam System with Prescribed Performance. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4650–4658. [Google Scholar] [CrossRef]
- Nuchkrua, T.; Chen, S.-L. Precision contouring control of five degree of freedom robot manipulators with uncertainty. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416682703. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Lin, S.; Zhu, D.; Wen, G. Vibration Control of a Riser-Vessel System Subject to Input Backlash and Extraneous Disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 516–520. [Google Scholar] [CrossRef]
- Cao, F.; Liu, J. Optimal trajectory control for a two-link rigid-flexible manipulator with ODE-PDE model. Optim. Control Appl. Methods 2018, 39, 1515–1529. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, L.; Su, X.; Luo, G.; Li, R.; Huang, Y. Hybrid force/position control in workspace of robotic manipulator in uncertain environments based on adaptive fuzzy control. Robot. Auton. Syst. 2021, 145, 103870–103881. [Google Scholar] [CrossRef]
- Diao, S.; Sun, W.; Yuan, W. Adaptive fuzzy practical tracking control for flexible-joint robots via command filter design. Meas. Control 2020, 53, 814–823. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, Z.; Ahn, C.K. Boundary Constrained Control of Flexible String Systems Subject to Disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 112–116. [Google Scholar] [CrossRef]
- Zhao, Z.; Ahn, C.K.; Li, H.X. Boundary Anti-Disturbance Control of a Spatially Nonlinear Flexible String System. IEEE Trans. Ind. Electron. 2019, 67, 4846–4856. [Google Scholar] [CrossRef]
- Cao, F.; Liu, J.K. Boundary Control for a Rigid-Flexible Manipulator with Input Constraints based on ODE-PDE Model. J. Comput. Nonlinear Dyn. 2019, 14, 094501. [Google Scholar] [CrossRef]
- Tian, L.; Collins, C. A dynamic recurrent neural network-based controller for a rigid–flexible manipulator system. Mechatronics 2004, 14, 471–490. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, R.; Peng, K.; He, W. Boundary Output Feedback Control for a Flexible Two-Link Manipulator System with High-Gain Observers. IEEE Trans. Control Syst. Technol. 2019, 29, 835–840. [Google Scholar] [CrossRef]
- Cao, F.; Liu, J. Boundary vibration control for a two-link rigid–flexible manipulator with quantized input. J. Vib. Control 2019, 25, 107754631987350. [Google Scholar] [CrossRef]
- Cao, F.; Liu, J. Adaptive actuator fault compensation control for a rigid-flexible manipulator with ODEs-PDEs model. Int. J. Syst. Sci. 2018, 49, 1748–1759. [Google Scholar] [CrossRef]
- Meng, Q.; Lai, X.; Yan, Z.; Wu, M. Tip Position Control and Vibration Suppression of a Planar Two-Link Rigid-Flexible Underactuated Manipulator. IEEE Trans. Cybern. 2020, 52, 6771–6783. [Google Scholar] [CrossRef] [PubMed]
- Fenili, A. The rigid-flexible robotic manipulator: Nonlinear control and state estimation considering a different mathematical model for estimation. Am. Inst. Phys. 2012, 20, 1049–1063. [Google Scholar]
- Tayebi, A. Adaptive iterative learning control for robot manipulators. In Proceedings of the IEEE International Conference on Intelligent Computing & Intelligent Systems, Xiamen, China, 29–31 October 2010. [Google Scholar]
- Zhou, X.; Wang, H.; Tian, Y.; Zheng, G. Disturbance observer-based adaptive boundary iterative learning control for a rigid-flexible manipulator with input backlash and endpoint constraint. Int. J. Adapt. Control Signal Process. 2020, 34, 1220–1241. [Google Scholar] [CrossRef]
- Cao, F.; Liu, J. An adaptive iterative learning algorithm for boundary control of a coupled ODE–PDE two-link rigid–flexible manipulator. J. Frankl. Inst. 2016, 354, 277–297. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, H.; Tian, Y. Adaptive boundary iterative learning vibration control using disturbance observers for a rigid–flexible manipulator system with distributed disturbances and input constraints. J. Vib. Control 2022, 28, 1324–1340. [Google Scholar] [CrossRef]
- Li, F.Z.; Tong, S.G.; Wang, X.B.; Cheng, X.M. Rigid-flexible coupling dynamics and characteristics of marine excavator’s mechanical arm. J. Vib. Shock. 2014, 33, 157–163. [Google Scholar]
- Cao, F.; Liu, J. Partial differential equation modeling and vibration control for a nonlinear 3D rigid-flexible manipulator system with actuator faults. Int. J. Robust Nonlinear Control 2019, 29, 3793–3807. [Google Scholar] [CrossRef]
- Cao, F.; Liu, J. Three-dimensional modeling and input saturation control for a two-link flexible manipulator based on infinite dimensional model-ScienceDirect. J. Frankl. Inst. 2020, 357, 1026–1042. [Google Scholar] [CrossRef]
- Bristow, D.A.; Tharayil, M.; Alleyne, A.G. A survey of iterative learning control. IEEE Control Syst. 2006, 26, 96–114. [Google Scholar]
- Zhao, Z.; He, X.; Ahn, C.K. Boundary Disturbance Observer-Based Control of a Vibrating Single-Link 168 Flexible Manipulator. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 2382–2390. [Google Scholar] [CrossRef]
- Xu, J.X.; Ying, T.; Lee, T.H. Iterative learning control design based on composite energy function with input saturation. Automatica 2004, 40, 1371–1377. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit | Symbol | Value | Unit |
|---|---|---|---|---|---|
| 0.15 | kg m2 | 0.02 | kg m2 | ||
| 0.20 | kg m2 | 0.1 | m | ||
| 0.6 | m | 2 | Kg | ||
| 0.2 | Kg/m | 9 | N m2 |
| Symbol | Value | Unit | Symbol | Value | Unit |
|---|---|---|---|---|---|
| 110 | \ | 60 | \ | ||
| 80 | \ | 40 | \ | ||
| 80 | \ | 40 | \ | ||
| 6 | \ | 18 | \ | ||
| 18 | \ | 18 | \ | ||
| 10 | \ | 6 | \ | ||
| 13 | \ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Dai, X.; Huang, Q.; Wu, Q. AILC for Rigid-Flexible Coupled Manipulator System in Three-Dimensional Space with Time-Varying Disturbances and Input Constraints. Actuators 2022, 11, 268. https://doi.org/10.3390/act11090268
Zhang J, Dai X, Huang Q, Wu Q. AILC for Rigid-Flexible Coupled Manipulator System in Three-Dimensional Space with Time-Varying Disturbances and Input Constraints. Actuators. 2022; 11(9):268. https://doi.org/10.3390/act11090268
Chicago/Turabian StyleZhang, Jiaming, Xisheng Dai, Qingnan Huang, and Qiqi Wu. 2022. "AILC for Rigid-Flexible Coupled Manipulator System in Three-Dimensional Space with Time-Varying Disturbances and Input Constraints" Actuators 11, no. 9: 268. https://doi.org/10.3390/act11090268
APA StyleZhang, J., Dai, X., Huang, Q., & Wu, Q. (2022). AILC for Rigid-Flexible Coupled Manipulator System in Three-Dimensional Space with Time-Varying Disturbances and Input Constraints. Actuators, 11(9), 268. https://doi.org/10.3390/act11090268