A giant magnetostrictive actuator, a new-type actuator with giant magnetostrictive materials as the drive element, is a power output device with the magnetostrictive effect, accompanied by the advantages of a high output frequency, strong stability, and large output force [
1]. In recent years, the increasing speed of high-speed trains has increased the vibration of the train due to the irregularities of the track. The application of a giant magnetostrictive actuator to a train’s active suspension allows for different damping forces to be output based on the disturbance excitation of distinct lines, thereby lessening train vibration and enhancing the stability and comfort of the train operation. Therefore, the application of a super magnetostrictive actuator in train active suspension has a good prospect.
Due to the serious hysteresis nonlinearity of the giant magnetostrictive actuator output, however, it is difficult to control the precise output, which greatly limits the practical application of giant magnetostrictive actuators [
2]. The hysteresis characteristic of a giant magnetostrictive actuator can be expressed by a hysteresis model, and establishing an accurate hysteresis model has become a significant foundation for solving hysteresis nonlinearity. At present, hysteresis models are generally divided into two types: physical models and phenomenological models, the former of which mainly include the J-A model [
3] and the free energy model [
4] and the latter of which include the Preisach model [
5], the Prandtl–Ishilinskii (PI) model [
6], and neural network models [
7]. In application, the J-A model and the free energy model require high-precision experimental data and more model parameters. The Preisach model is characterized by dual integrals and a complicated solving process, thus restricting its application. The solution precision of neural network models excessively relies upon the accuracy of experimental data. Over the other methods, the PI model integrates the advantages of a small calculated quantity, high flexibility, and easy identification and solution. In this study, therefore, a giant magnetostrictive actuator was subjected to hysteresis modeling based on the PI model.
The PI model was put forward by Prandtl et al. to model magnetic materials. In the process of popularization, the basic PI model has been improved by research scholars and applied in various fields. Zhong, Y. [
8] introduced a cubic polynomial into the primary function of the PI model to construct an enhanced PI model, endowing the model with asymmetry so that it could describe the magnetic hysteresis phenomenon within a wider range and identify model parameters using the moth–flame algorithm. The results showed that the fitting accuracy of the improved PI model is significantly higher than that of the classical PI model under high frequencies. Zhao, X.H. [
9] divided hysteresis nonlinearity into a linear module and a nonlinear model, described the nonlinear model with the PI model, replaced the linear model with an electromechanical transfer function, and finally connected the PI model with the transfer function in series to form a dynamic hysteresis model and solve the inverse model. The results manifested that the designed dynamic PI model displays good performance within 0–50 Hz. Tang, H.B. [
10] improved the PI model by adding a dead-zone operator and introducing a frequency function. It was then experimentally verified that the improved model is much better than the classical PI model and can fit the GMM output curve well within 80 Hz. Pan, Y. [
11] optimized the parameters of the classical PI model using the sequential quadratic programming algorithm, added a shift operator to make the model asymmetric, and improved the rate dependence of the model through the series ARX model given the shortcomings of the asymmetric PI model. Finally, it was verified that the model has a good fitting effect on hysteresis curves above 200 Hz, but the improving effect on low-frequency hysteresis curves is not evident. Subhash Rakheja et al. [
12] established a rate-dependent PI model based on the memoryless function of the dead-zone operator and compared the comprehensive PI model data and the actual output. The comparison results revealed that the improved model can describe the nonlinear hysteresis characteristics in a wide range of excitation amplitudes and frequencies. Dargahi et al. [
13] described the hysteresis curve of the magnetorheological elastomer using the improved generalized PI model and replaced the original equal interval distribution with the threshold distribution function. The results showed that the improved generalized model can accurately characterize the hysteresis characteristics of magnetorheological materials under different loading conditions and magnetic field ranges. Peng et al. [
14] applied the PI model to the hysteresis nonlinear modeling of a giant magnetostrictive actuator, proposed a rate-dependent modified PI model, and then identified the parameters of the model by using the constrained least squares method. The results showed that, within a certain frequency range, the rate-dependent modified PI model could effectively describe the hysteresis characteristics of the giant magnetostrictive actuator. Xiao et al. [
15] modified the classical PI model and used the least square method to identify parameters of the modified PI model. The results show that the modified PI model can reduce the modeling error, but the model accuracy is still not guaranteed under a high frequency. Nie, L.L. et al. [
16] established a rate-dependent asymmetric hysteresis RDAPI model by introducing a dynamic envelope function into the play operator of the PI model and then combined with other improved PI models to characterize the rate-dependent and asymmetric hysteresis behavior of the piezoelectric micro-positioning level. Experiments show that the accuracy of the RDAPI model is improved significantly. On this basis, a robust adaptive control method is proposed. Wang, W. et al. [
17] improved the Play operator in the PI model to an asymmetric operator, established an asymmetric API model, and optimized the parameters of the API model, which reduced the number of parameters and maintained a high accuracy. The experimental results show that the compensator based on this model can effectively suppress the hysteresis of the piezoelectric actuator.
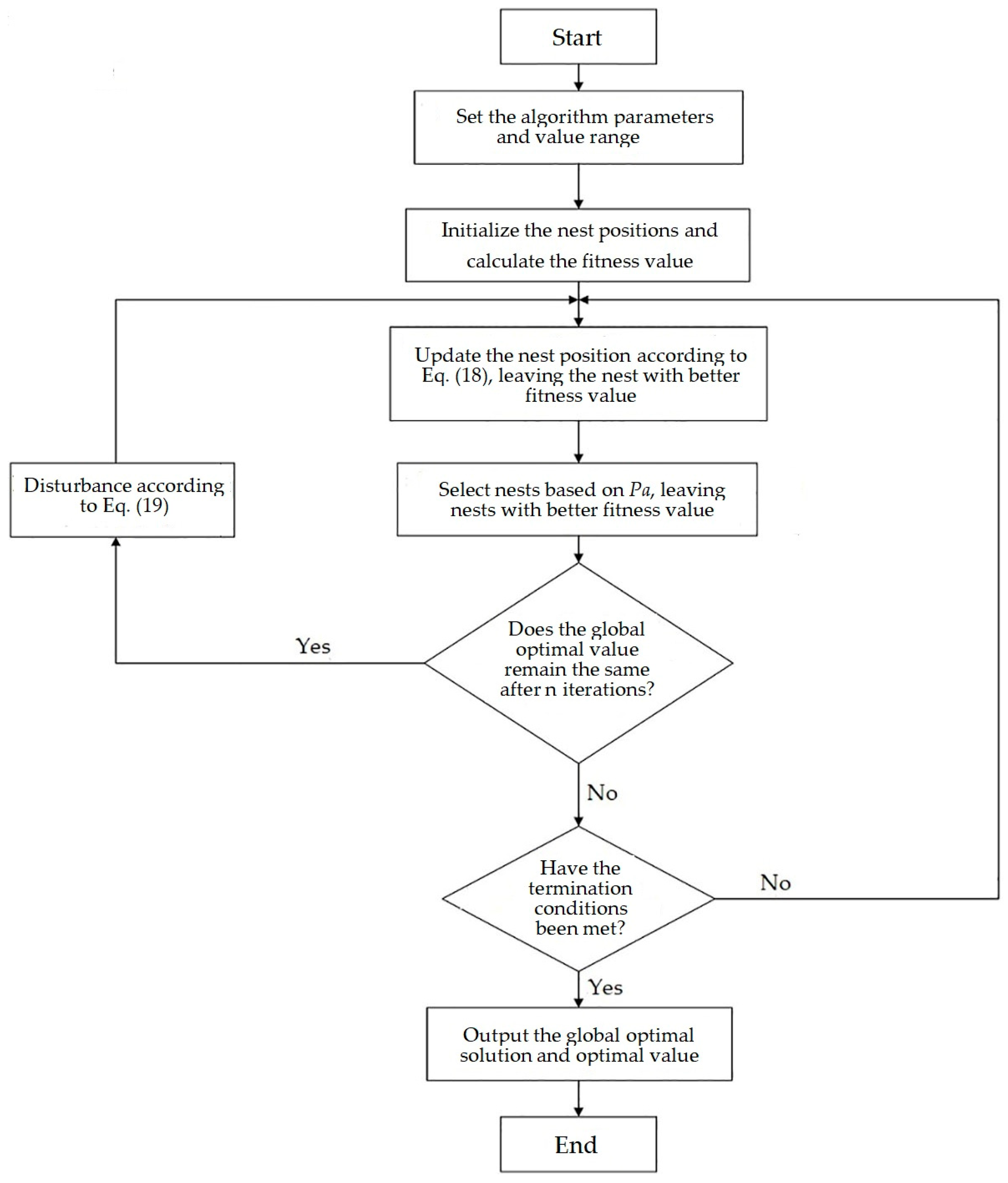
In summary, the parameter identification and hysteresis modeling techniques for the magnetostrictive actuator based on the PI model are still immature. In this paper, aiming at the rate-dependent asymmetric hysteresis characteristics of the output curve of the active suspension magnetostrictive actuator, a rate-dependent asymmetric PI (RAPI) model was constructed by adding auxiliary functions based on the PI model, which can accurately describe the hysteresis curve of the output of the magnetostrictive actuator. In order to solve the problem of the RAPI model having multiple parameters that are difficult to identify, an improved cuckoo search (ICS) algorithm was proposed, which has higher optimization accuracy and stability compared to traditional algorithms. Finally, through comparative experiments with the PI model, it is verified that the RAPI model effectively improves the fitting accuracy of the actuator’s hysteresis curve. Based on the RAPI model, precise dynamic control of the giant magnetostrictive actuator can be further achieved, which is of great significance for the practical application of the magnetostrictive actuator in the active suspension of trains.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}