
Experimental Observations of Transient Flows in Separation Control Using a Plasma Actuator


Abstract
:1. Introduction
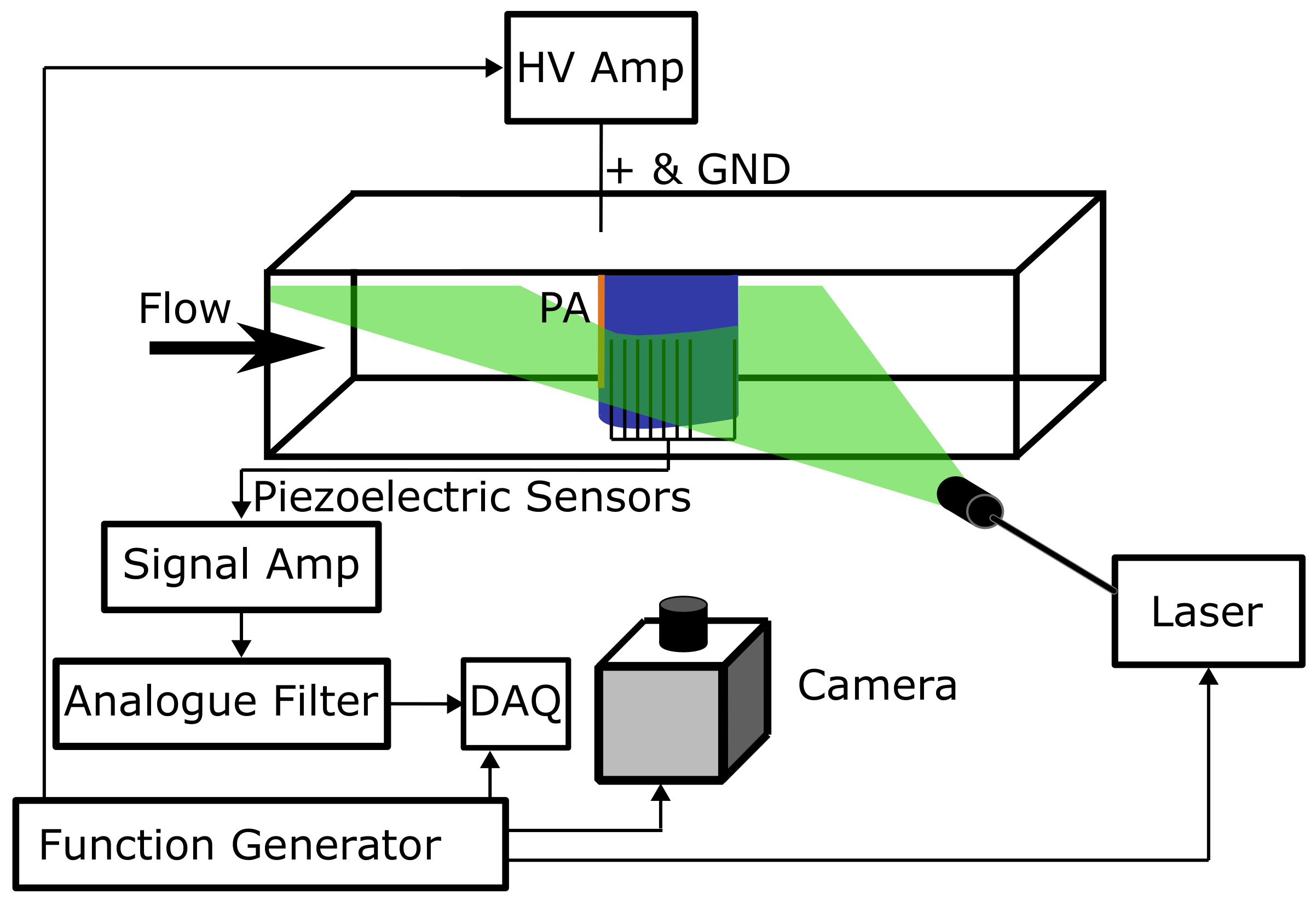
2. Experimental Setup
3. Results
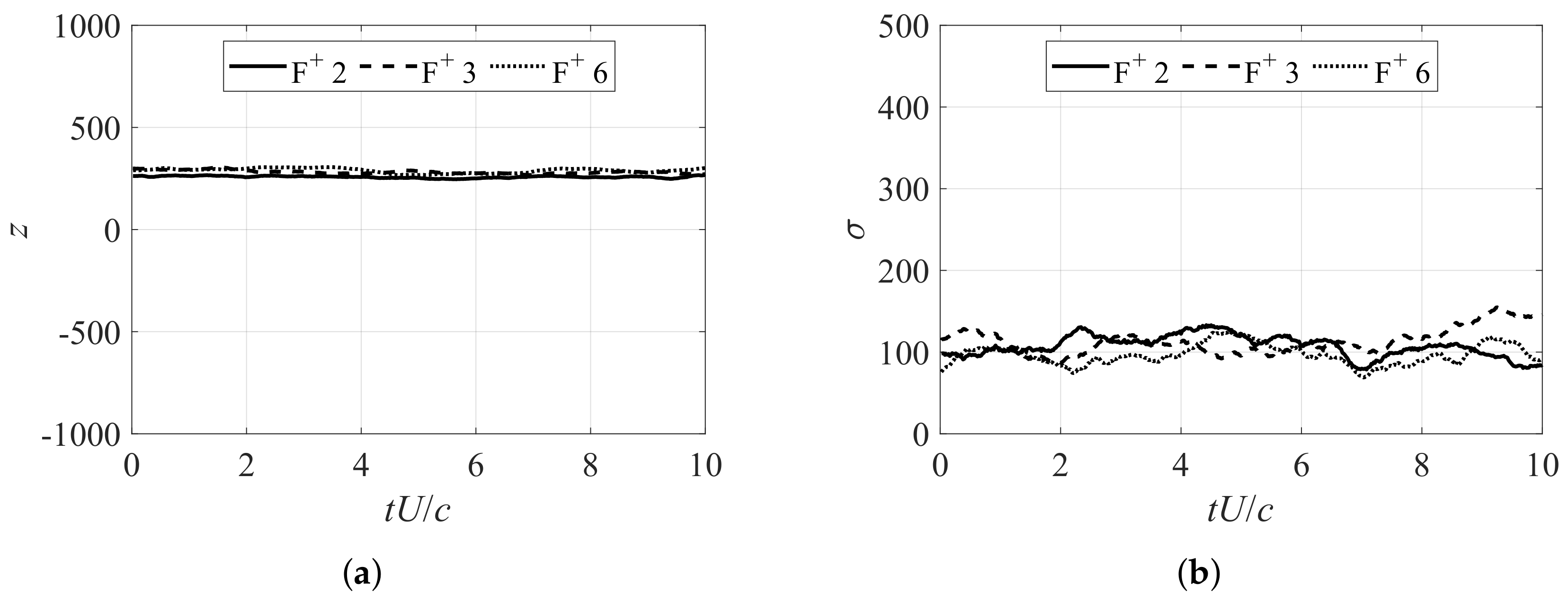
3.1. Baseline Flow Characteristics
3.1.1. Separated Flow
3.1.2. Attached Flow
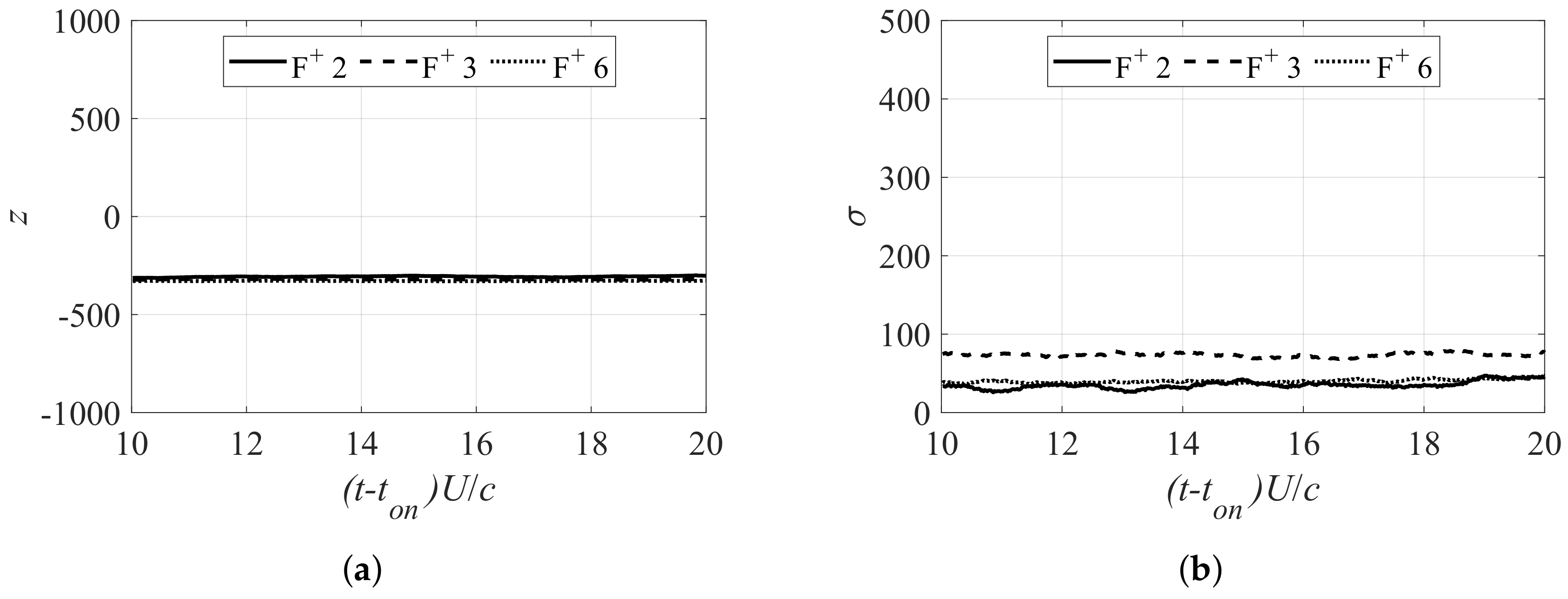
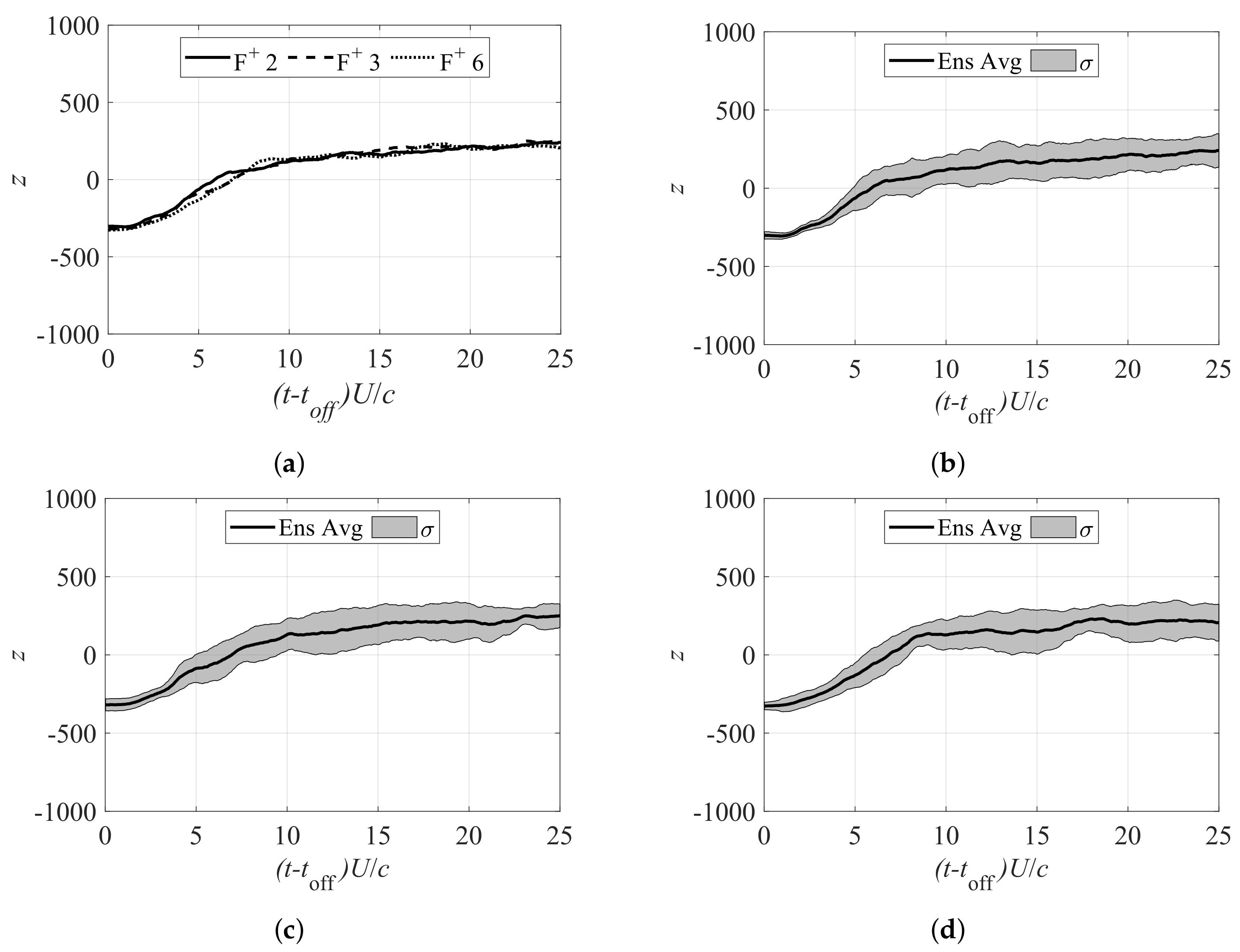
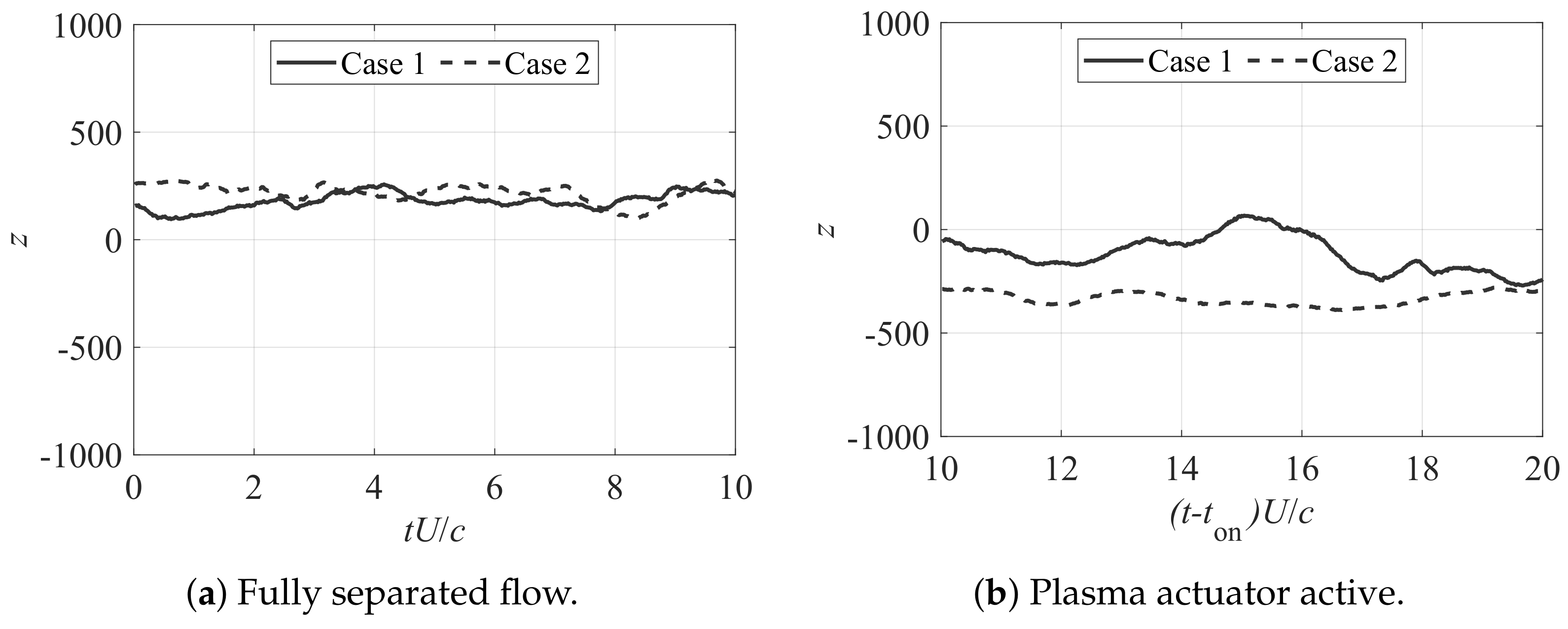
3.2. Reattachment Transient Process
3.3. Separation Transient Process
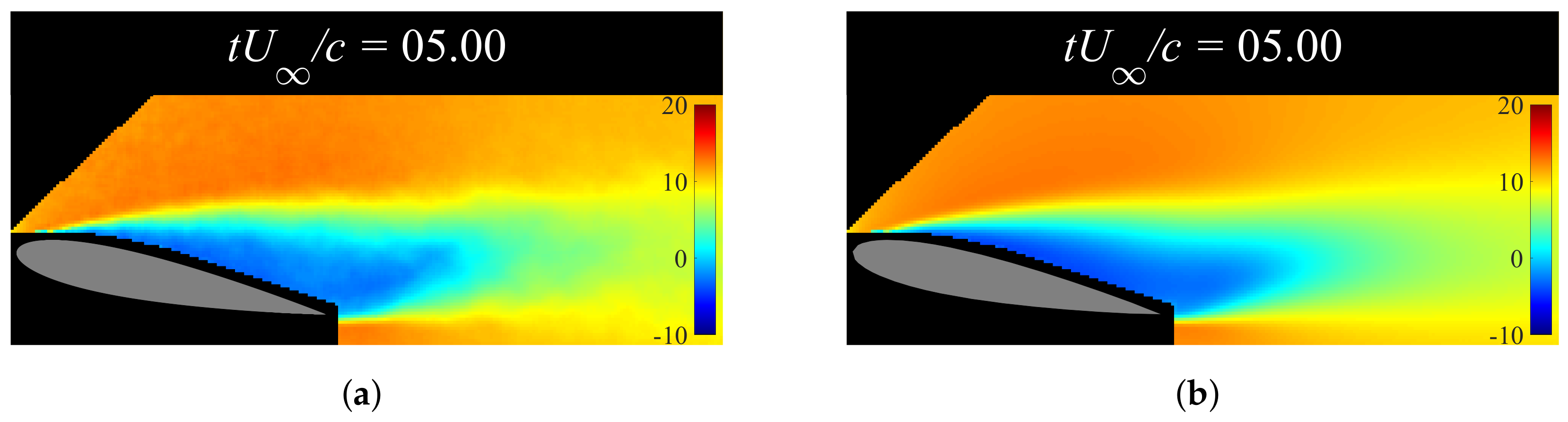
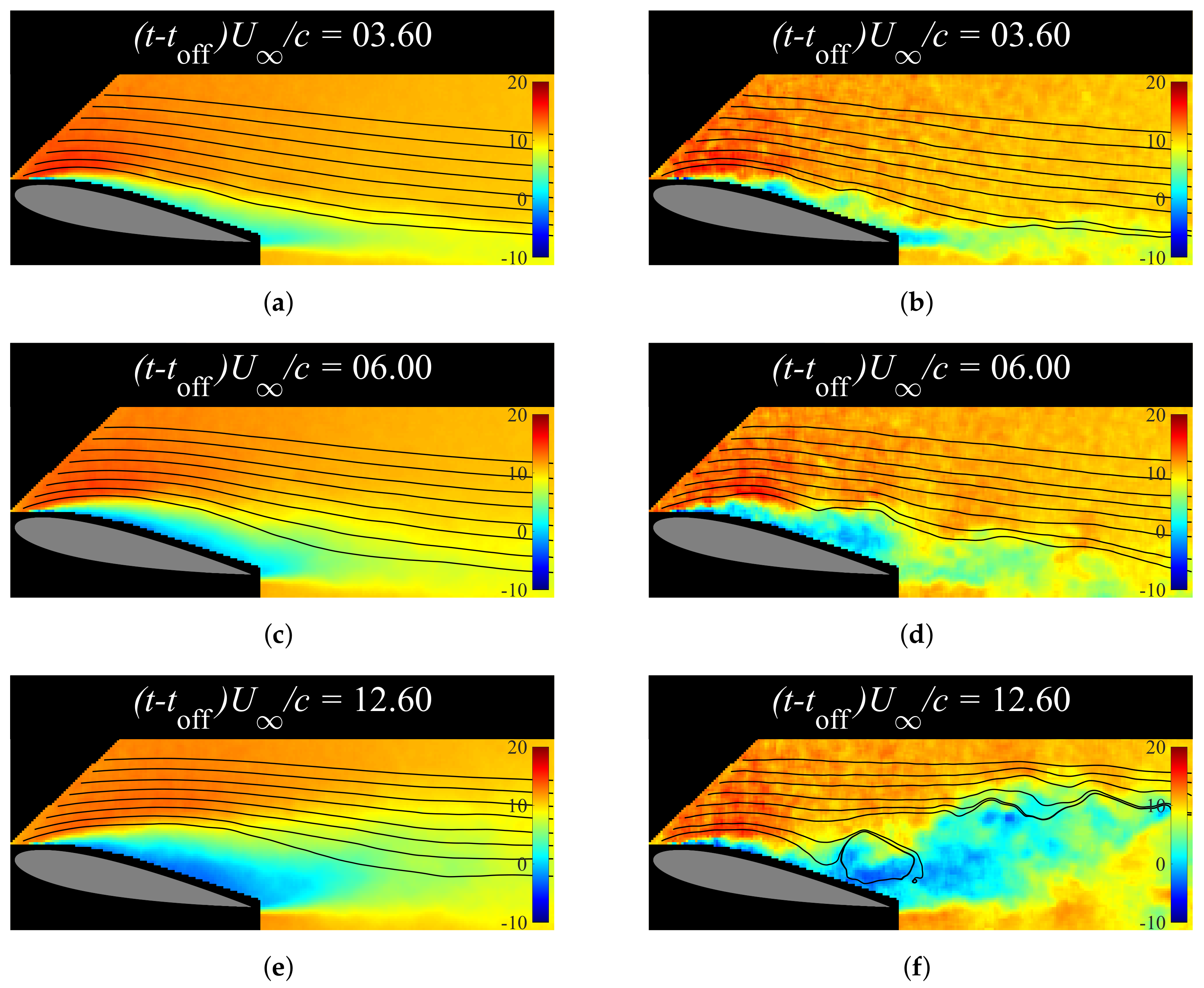
3.3.1. Flow Field Analysis
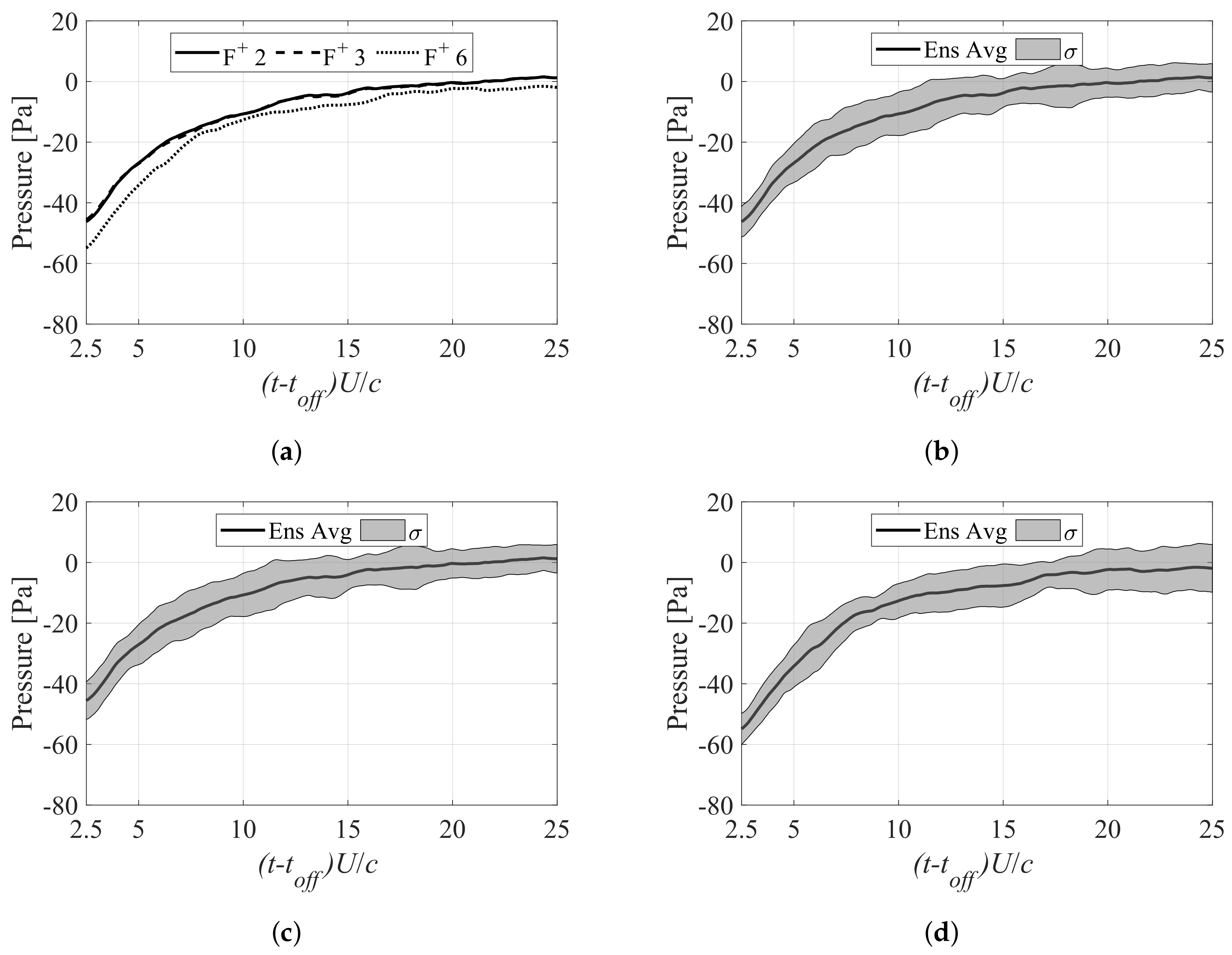
3.3.2. Surface Pressure Analysis
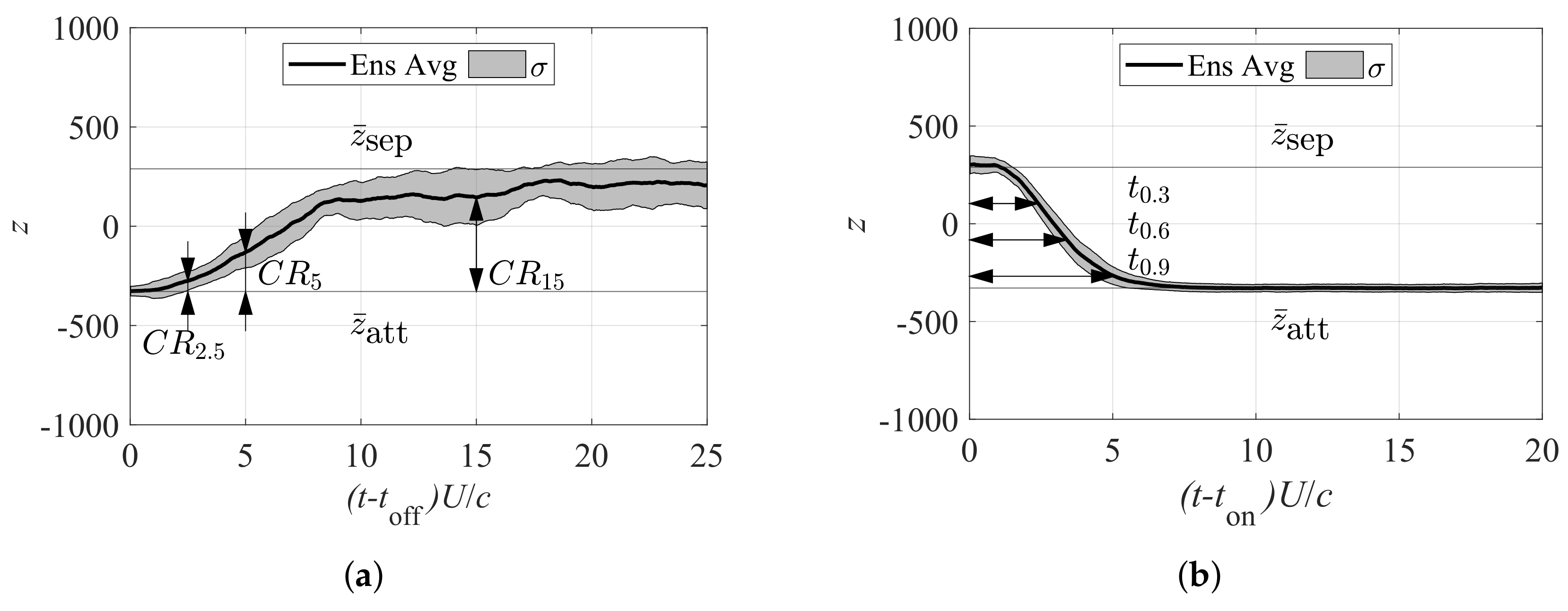
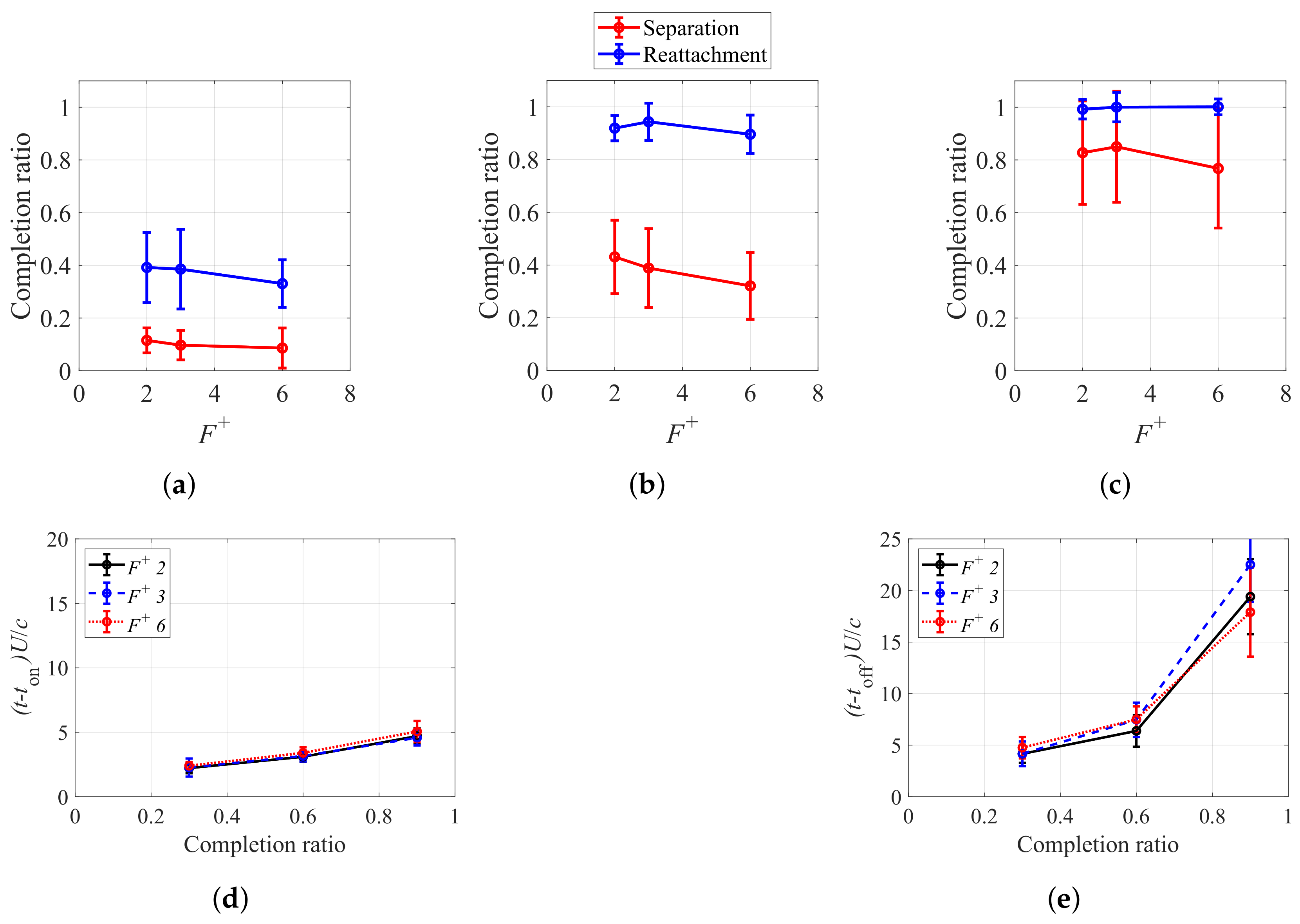
4. Quantitative Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| z | First POD coefficient |
| Standard deviation | |
| Time average of z during pseudo-stationary controlled conditions | |
| Time average of z during fully separated conditions | |
| AC | Alternating current |
| c | Wing chord |
| f | Frequency of sinusoidal wave |
| Burst frequency | |
| Nondimensional burst frequency | |
| PA | Plasma actuator |
| t | Time |
| Instant at which the plasma actuator is turned off | |
| Instant at which the plasma actuator is turned on | |
| Instant at which the plasma actuator is either turned on or off | |
| T | Period of sinusoidal wave |
| Period of burst | |
| Inactive period during burst | |
| Active period during burst | |
| U | Horizontal component of wind velocity |
| Freestream velocity | |
| V | Voltage |
Appendix A. Experimental Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | Case 2 | |||||
|---|---|---|---|---|---|---|
| mean(z) | 179.2 | 219.6 | 257.6 | 281.8 | 289.0 | |
| mean((z)) | 107.3 | 113.3 | 97.1 | |||
| mean(z) | −116.4 | −334.2 | −306.3 | −320.6 | −328.7 | |
| mean((z)) | 35.2 | 73.6 | 40.0 | |||
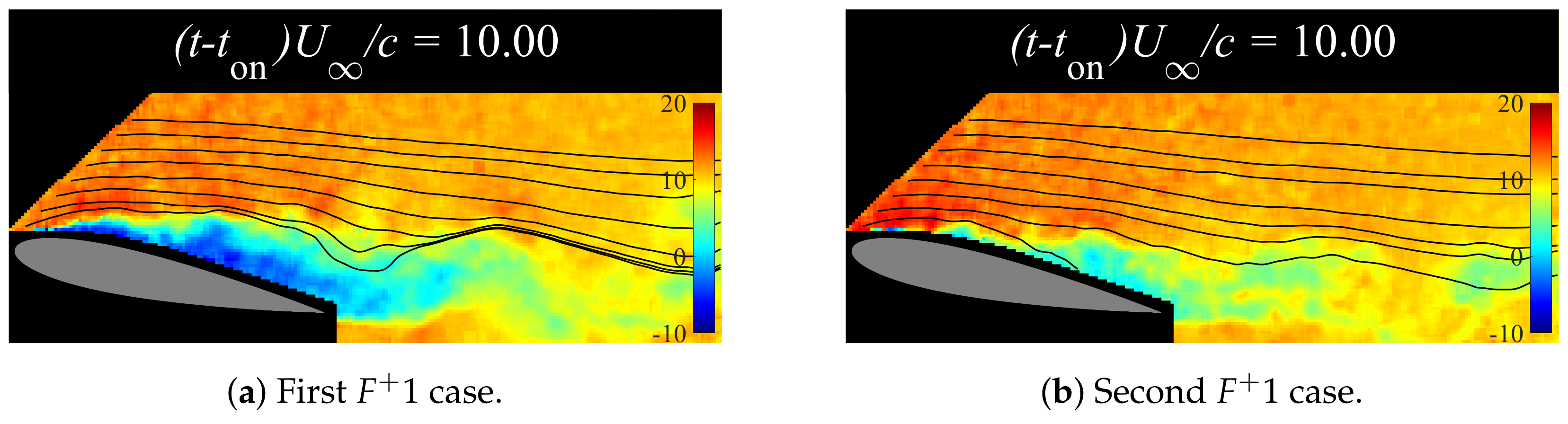
Appendix B. Analysis of F+ = 1


References
- Post, M.L.; Corke, T.C. Separation control on high angle of attack airfoil using plasma actuators. AIAA J. 2004, 42, 2177–2184. [Google Scholar] [CrossRef]
- Roth, J.R. Aerodynamic flow acceleration using paraelectric and peristaltic electrohydrodynamic effects of a one atmosphere uniform glow discharge plasma. Phys. Plasmas 2003, 10, 2117–2126. [Google Scholar] [CrossRef]
- Aono, H.; Kawai, S.; Nonomura, T.; Sato, M.; Fujii, K.; Okada, K. Plasma-actuator burst-mode frequency effects on leading-edge flow-separation control at Reynolds number 2.6 × 105. AIAA J. 2017, 55, 3789–3806. [Google Scholar] [CrossRef]
- Greenblatt, D.; Schneider, T.; Schüle, C.Y. Mechanism of flow separation control using plasma actuation. Phys. Fluids 2012, 24, 077102. [Google Scholar] [CrossRef]
- Vernet, J.A.; Örlü, R.; Alfredsson, P.H. Flow separation control behind a cylindrical bump using dielectric-barrier-discharge vortex generator plasma actuators. J. Fluid Mech. 2018, 835, 852–879. [Google Scholar] [CrossRef]
- Wicks, M.; Thomas, F.; Schatzman, D.; Bowles, P.; Corke, T.; Patel, M.; Cain, A. A parametric investigation of plasma streamwise vortex generator performance. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 824. [Google Scholar]
- Riherd, M.; Roy, S. Serpentine geometry plasma actuators for flow control. J. Appl. Phys. 2013, 114, 083303. [Google Scholar] [CrossRef]
- Mohammadpour, P.; Mani, M.; Saeedi, M. Experimental investigation of induced velocity by dielectric barrier discharge plasma actuator in different configurations. AIP Adv. 2021, 11, 105007. [Google Scholar] [CrossRef]
- Caruana, D.; Rogier, F.; Dufour, G.; Gleyzes, C. The Plasma Synthetic Jet Actuator, Physics, Modeling and Flow Control Application on Separation. Aerosp. Lab 2013, 1–13. [Google Scholar]
- Zong, H.; Chiatto, M.; Kotsonis, M.; De Luca, L. Plasma synthetic jet actuators for active flow control. Actuators 2018, 7, 77. [Google Scholar] [CrossRef]
- Benard, N.; Moreau, E.; Zouzou, N.; Rabat, H.; Pons, J.; Hong, D.; Leroy, A.; Peschke, P.; Hollenstein, C. Nanosecond Pulsed Plasma Actuators. ERCOFTAC Bull. 2013, 94, 11–16. [Google Scholar]
- Lehmann, R.; Akins, D.; Little, J. Effects of Nanosecond Pulse Driven Plasma Actuators on Turbulent Shear Layers. AIAA J. 2016, 54, 637–651. [Google Scholar] [CrossRef]
- Subrata, R.; Pengfei, Z.; Arnob, D.; Jignesh, S. Dielectric barrier discharge actuator for vehicle drag reduction at highway speeds. AIP Adv. 2016, 6, 025322. [Google Scholar] [CrossRef]
- Iranshahi, K.; Mani, M. Dielectric Barrier Discharge Actuators Employed as Alternative to Conventional High-Lift Devices. J. Aircr. 2018, 55, 2104–2113. [Google Scholar] [CrossRef]
- Al-Sadawi, L.; Chong, T.P.; Kim, J.H. Aerodynamic noise reduction by plasma actuators for a flat plate with blunt trailing edge. J. Sound Vib. 2019, 439, 173–193. [Google Scholar] [CrossRef]
- Patel, T.K.; Lilley, A.J.; Shen, W.; Porrello, C.; Schindler-Tyka, A.; Roy, S.; Lear, W.E.; Miller, S.A. Fundamental investigation using active plasma control to reduce blade–vortex interaction noise. Int. J. Aeroacoust. 2021, 20, 870–900. [Google Scholar] [CrossRef]
- Corke, T.C.; Post, M.L.; Orlov, D.M. Single dielectric barrier discharge plasma enhanced aerodynamics: Physics, modeling and applications. Exp. Fluids 2009, 46, 1–26. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Pascoa, J.; Oliveira, P. Comparison of DBD plasma actuators flow control authority in different modes of actuation. Aerosp. Sci. Technol. 2018, 78, 183–196. [Google Scholar] [CrossRef]
- Asada, K.; Ninomiya, Y.; Fujii, K.; Oyama, A. Airfoil Flow Experiment on the Duty Cycle of DBD Plasma Actuator. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar] [CrossRef]
- Fujii, K. Three Flow Features behind the Flow Control Authority of DBD Plasma Actuator: Result of High-Fidelity Simulations and the Related Experiments. Appl. Sci. 2018, 8, 546. [Google Scholar] [CrossRef]
- Moreau, E.; Debien, A.; Breux, J.M.; Benard, N. Control of a turbulent flow separated at mid-chord along an airfoil with DBD plasma actuators. J. Electrost. 2016, 83, 78–87. [Google Scholar] [CrossRef]
- Sato, M.; Nonomura, T.; Okada, K.; Asada, K.; Aono, H.; Yakeno, A.; Abe, Y.; Fujii, K. Mechanisms for laminar separated-flow control using dielectric-barrier-discharge plasma actuator at low Reynolds number. Phys. Fluids 2015, 27, 1–29. [Google Scholar] [CrossRef]
- Sato, M.; Aono, H.; Yakeno, A.; Nonomura, T.; Fujii, K.; Okada, K.; Asada, K. Multifactorial effects of operating conditions of dielectric-barrier-discharge plasma actuator on laminar-separated-flow control. AIAA J. 2015, 53, 2544–2559. [Google Scholar] [CrossRef]
- Sekimoto, S.; Nonomura, T.; Fujii, K. Burst-mode frequency effects of dielectric barrier discharge plasma actuator for separation control. AIAA J. 2017, 55, 1385–1392. [Google Scholar] [CrossRef]
- Sekimoto, S.; Fujii, K.; Anyoji, M.; Miyakawa, Y.; Ito, S.; Shimomura, S.; Nishida, H.; Nonomura, T.; Matsuno, T. Flow Control around NACA0015 Airfoil Using a Dielectric Barrier Discharge Plasma Actuator over a Wide Range of the Reynolds Number. Actuators 2023, 12, 43. [Google Scholar] [CrossRef]
- Visbal, M.; Gaitonde, D.; Roy, S. Control of Transitional and Turbulent Flows Using Plasma-Based Actuators. In Proceedings of the 36th AIAA Fluid Dynamics Conference and Exhibit, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar] [CrossRef]
- Benard, N.; Balcon, N.; Moreau, E. Electric Wind Produced by a Surface Dielectric Barrier Discharge Operating Over a Wide Range of Relative Humidity. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar] [CrossRef]
- Lilley, A.J.; Roy, S.; Michels, L.; Roy, S. Performance recovery of plasma actuators in wet conditions. J. Phys. D Appl. Phys. 2022, 55, 155201. [Google Scholar] [CrossRef]
- Wicks, M.; Thomas, F.O. Effect of Relative Humidity on Dielectric Barrier Discharge Plasma Actuator Body Force. AIAA J. 2015, 53, 2801–2805. [Google Scholar] [CrossRef]
- Benard, N.; Moreau, E.; Griffin, J.; Cattafesta, L.N.I. Slope seeking for autonomous lift improvement by plasma surface discharge. Exp. Fluids 2009, 48, 791–808. [Google Scholar] [CrossRef]
- Benard, N.; Cattafesta, L.N.; Moreau, E.; Griffin, J.; Bonnet, J.P. On the benefits of hysteresis effects for closed-loop separation control using plasma actuation. Phys. Fluids 2011, 23, 083601. [Google Scholar] [CrossRef]
- Broglia, R.; Choi, K.S.; Houston, P.; Pasquale, L.; Zanchetta, P. Output feedback control of flow separation over an aerofoil using plasma actuators. Int. J. Numer. Anal. Model. 2018, 15. [Google Scholar]
- Pasquale, L.; Durante, D.; Broglia, R. Flow separation prevention around a NACA0012 profile through multivariable feedback controlled plasma actuators. Comput. Fluids 2019, 182, 85–107. [Google Scholar] [CrossRef]
- Patel, M.P.; Sowle, Z.H.; Corke, T.C.; He, C. Autonomous Sensing and Control of Wing Stall Using a Smart Plasma Slat. J. Aircr. 2007, 44, 516–527. [Google Scholar] [CrossRef]
- Ogawa, T.; Asada, K.; Sekimoto, S.; Tatsukawa, T.; Fujii, K. Dynamic Burst Actuation to Enhance the Flow Control Authority of Plasma Actuators. Aerospace 2021, 8, 396. [Google Scholar] [CrossRef]
- Segawa, T.; Suzuki, D.; Fujino, T.; Jukes, T.; Matsunuma, T. Feedback control of flow separation using plasma actuator and FBG sensor. Int. J. Aerosp. Eng. 2016, 2016, 8648919. [Google Scholar] [CrossRef]
- Shimomura, S.; Sekimoto, S.; Oyama, A.; Fujii, K.; Nishida, H. Closed-Loop Flow Separation Control Using the Deep Q Network over Airfoil. AIAA J. 2020, 58, 1–11. [Google Scholar] [CrossRef]
- Amitay, M.; Glezer, A. Controlled transients of flow reattachment over stalled airfoils. Int. J. Heat Fluid Flow 2002, 23, 690–699. [Google Scholar] [CrossRef]
- Asada, K.; Nonomura, T.; Aono, H.; Sato, M.; Okada, K.; Fujii, K. LES of transient flows controlled by DBD plasma actuator over a stalled airfoil. Int. J. Comput. Fluid Dyn. 2015, 29, 215–229. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J.L. The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Taira, K.; Brunton, S.L.; Dawson, S.T.; Rowley, C.W.; Colonius, T.; McKeon, B.J.; Schmidt, O.T.; Gordeyev, S.; Theofilis, V.; Ukeiley, L.S. Modal analysis of fluid flows: An overview. AIAA J. 2017, 55, 4013–4041. [Google Scholar] [CrossRef]
- Nankai, K.; Ozawa, Y.; Nonomura, T.; Asai, K. Linear Reduced-order Model Based on PIV Data of Flow Field around Airfoil. Trans. Jpn. Soc. Aeronaut. Space Sci. 2019, 62, 227–235. [Google Scholar] [CrossRef]
- Nonomura, T.; Nankai, K.; Iwasaki, Y.; Komuro, A.; Asai, K. Quantitative evaluation of predictability of linear reduced-order model based on particle-image-velocimetry data of separated flow field around airfoil. Exp. Fluids 2021, 62, 112. [Google Scholar] [CrossRef]
- Sekimoto, S.; Asada, K.; Anyoji, M.; Nonomura, T.; Fujii, K. Comparative Study of Co-flow and Counter Blowing DBD Plasma Actuators for Separated Flow over an Airfoil. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar] [CrossRef]
- Sato, M.; Okada, K.; Asada, K.; Aono, H.; Nonomura, T.; Fujii, K. Unified mechanisms for separation control around airfoil using plasma actuator with burst actuation over Reynolds number range of 103–106. Phys. Fluids 2020, 32, 025102. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Viguera, R.; Anzai, Y.; Sasaki, Y.; Nonomura, T. Experimental Observations of Transient Flows in Separation Control Using a Plasma Actuator. Actuators 2023, 12, 218. https://doi.org/10.3390/act12060218
Viguera R, Anzai Y, Sasaki Y, Nonomura T. Experimental Observations of Transient Flows in Separation Control Using a Plasma Actuator. Actuators. 2023; 12(6):218. https://doi.org/10.3390/act12060218
Chicago/Turabian StyleViguera, Rodrigo, Yoshiki Anzai, Yasuo Sasaki, and Taku Nonomura. 2023. "Experimental Observations of Transient Flows in Separation Control Using a Plasma Actuator" Actuators 12, no. 6: 218. https://doi.org/10.3390/act12060218
APA StyleViguera, R., Anzai, Y., Sasaki, Y., & Nonomura, T. (2023). Experimental Observations of Transient Flows in Separation Control Using a Plasma Actuator. Actuators, 12(6), 218. https://doi.org/10.3390/act12060218