
Incremental Nonlinear Control for Aeroelastic Wing Load Alleviation and Flutter Suppression



Abstract
:1. Introduction
2. Methods
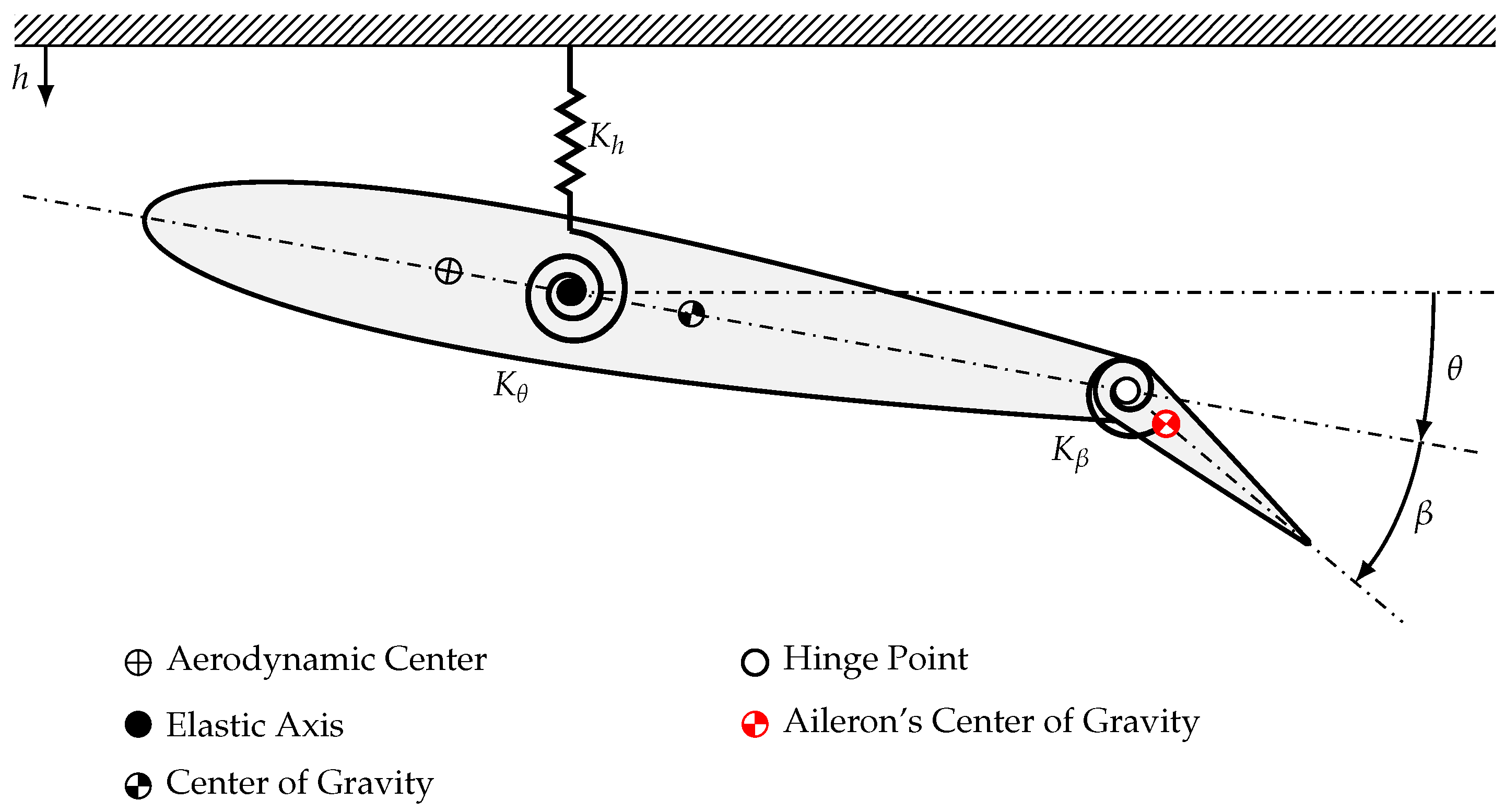
2.1. Dynamic Model for a Typical Aeroelastic Wing Section
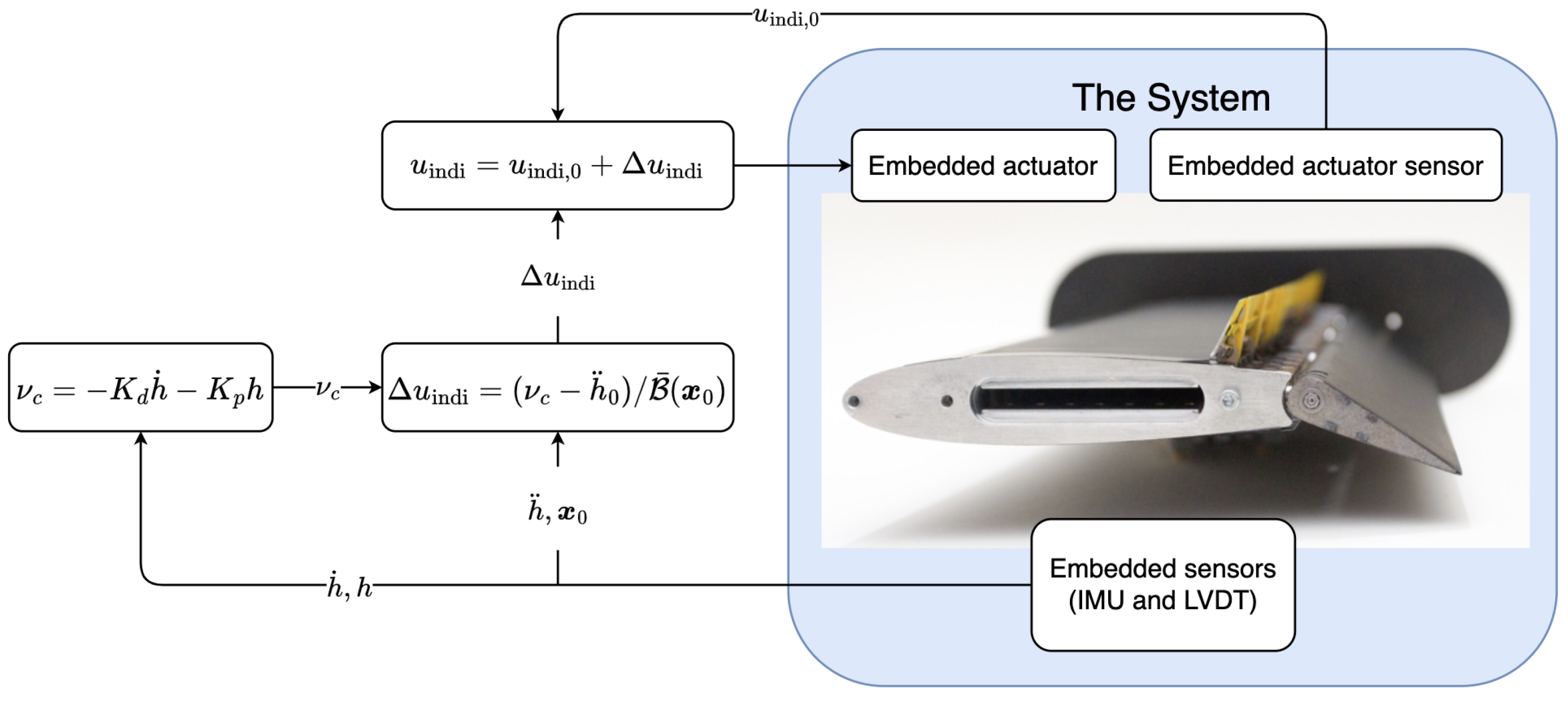
2.2. Incremental Nonlinear Dynamic Inversion
2.3. INDI Design for an Aeroelastic Wing
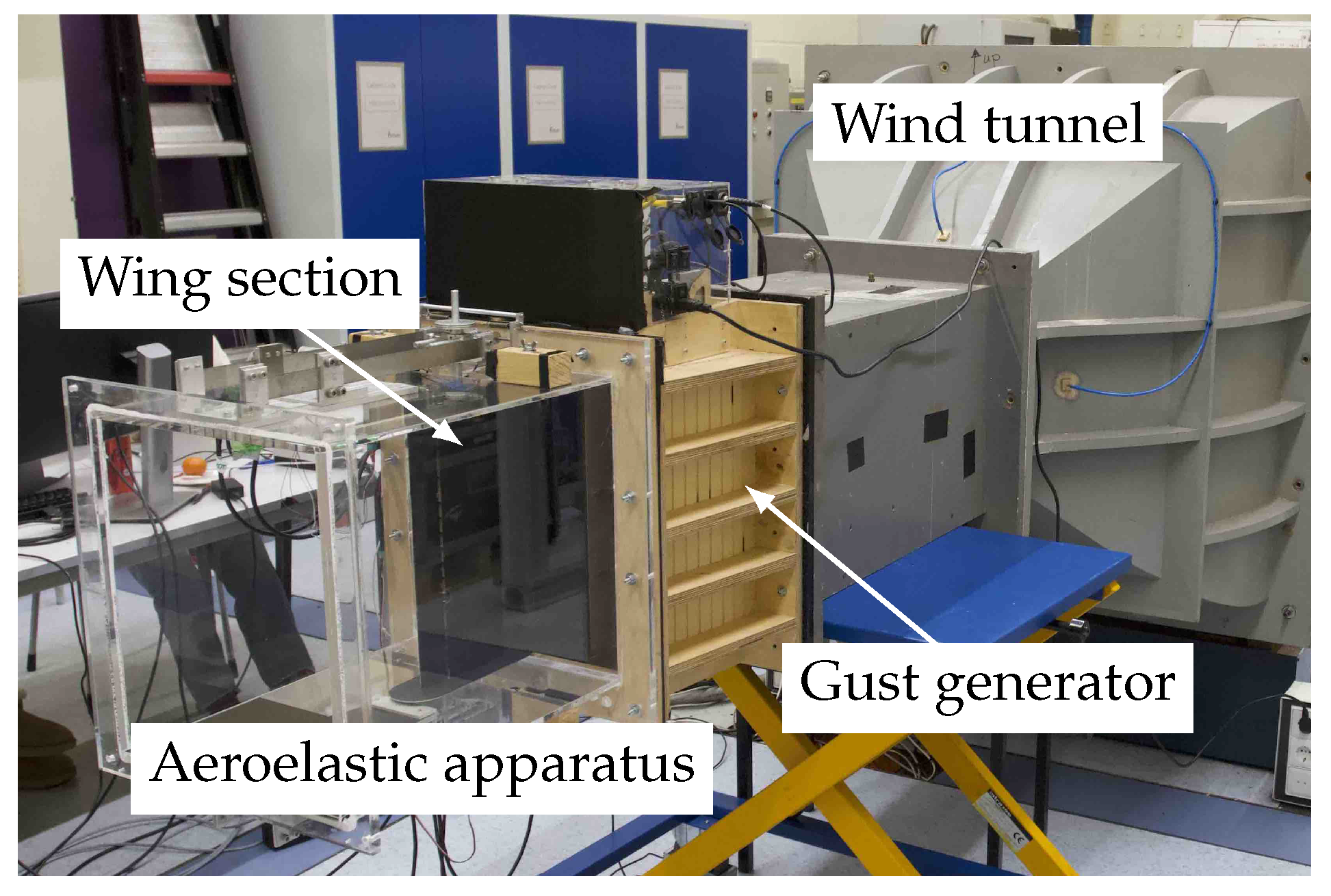
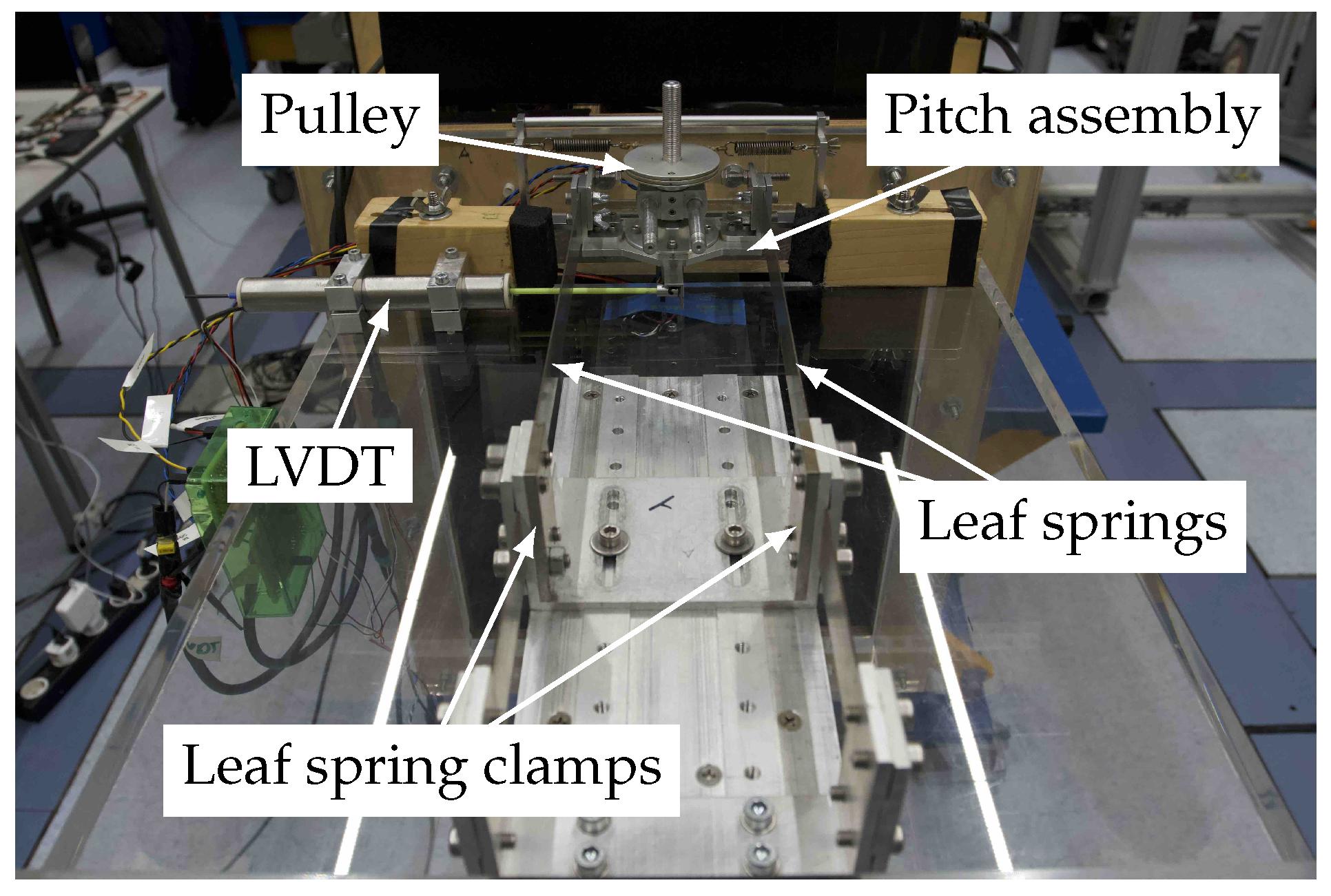
3. Experiment Setup
4. Results and Discussion
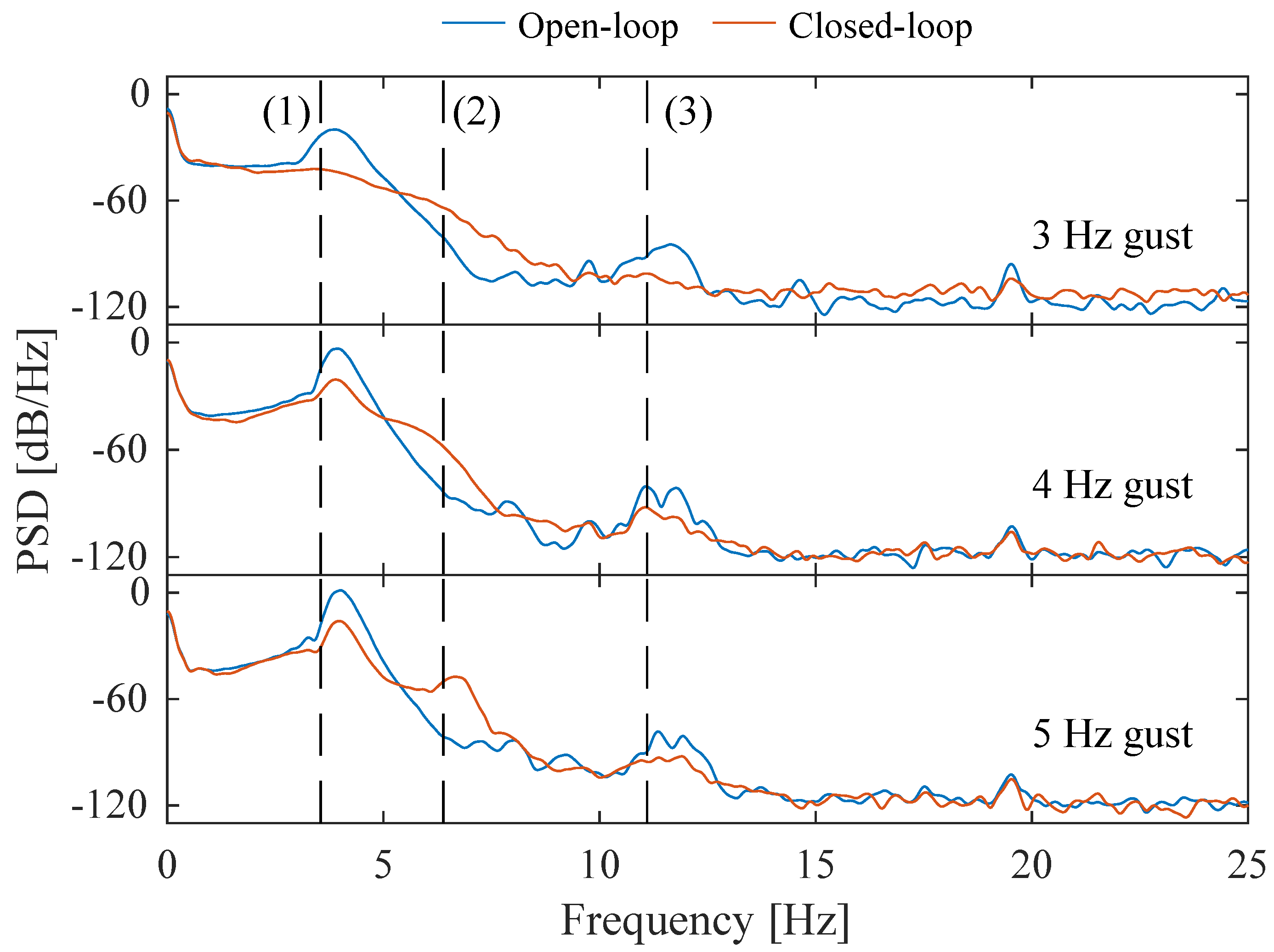
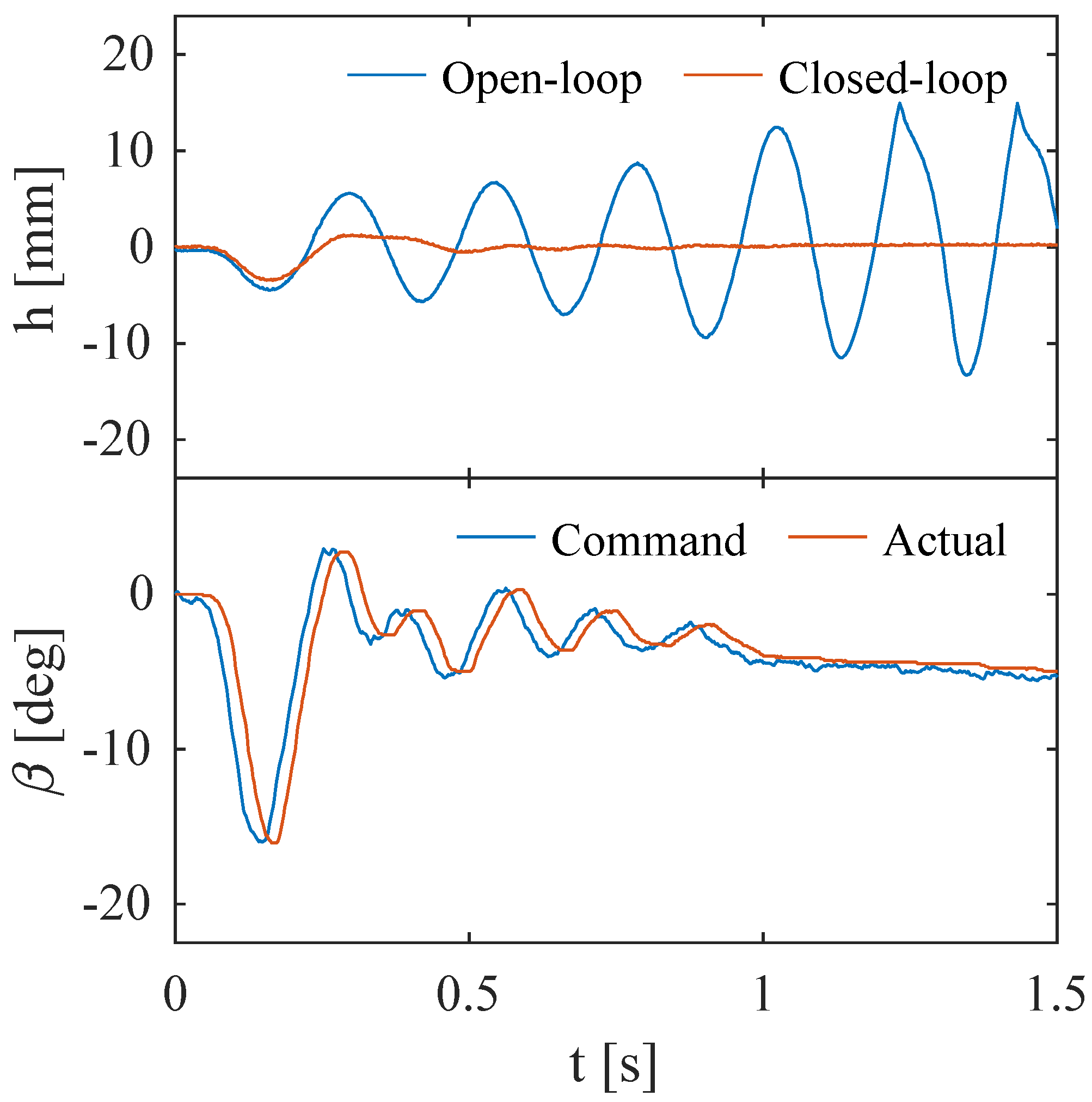
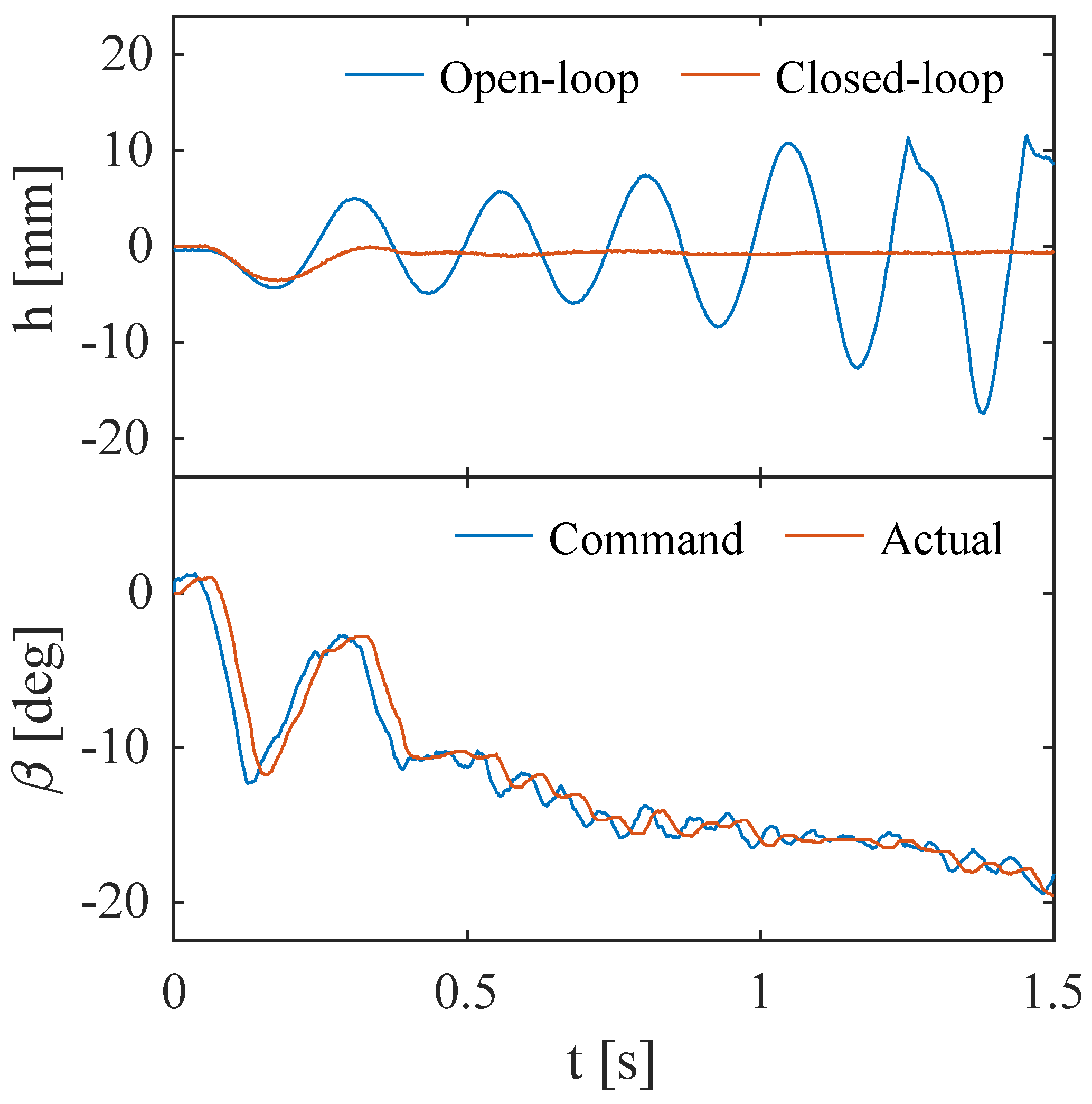
4.1. Gust Load Alleviation Results
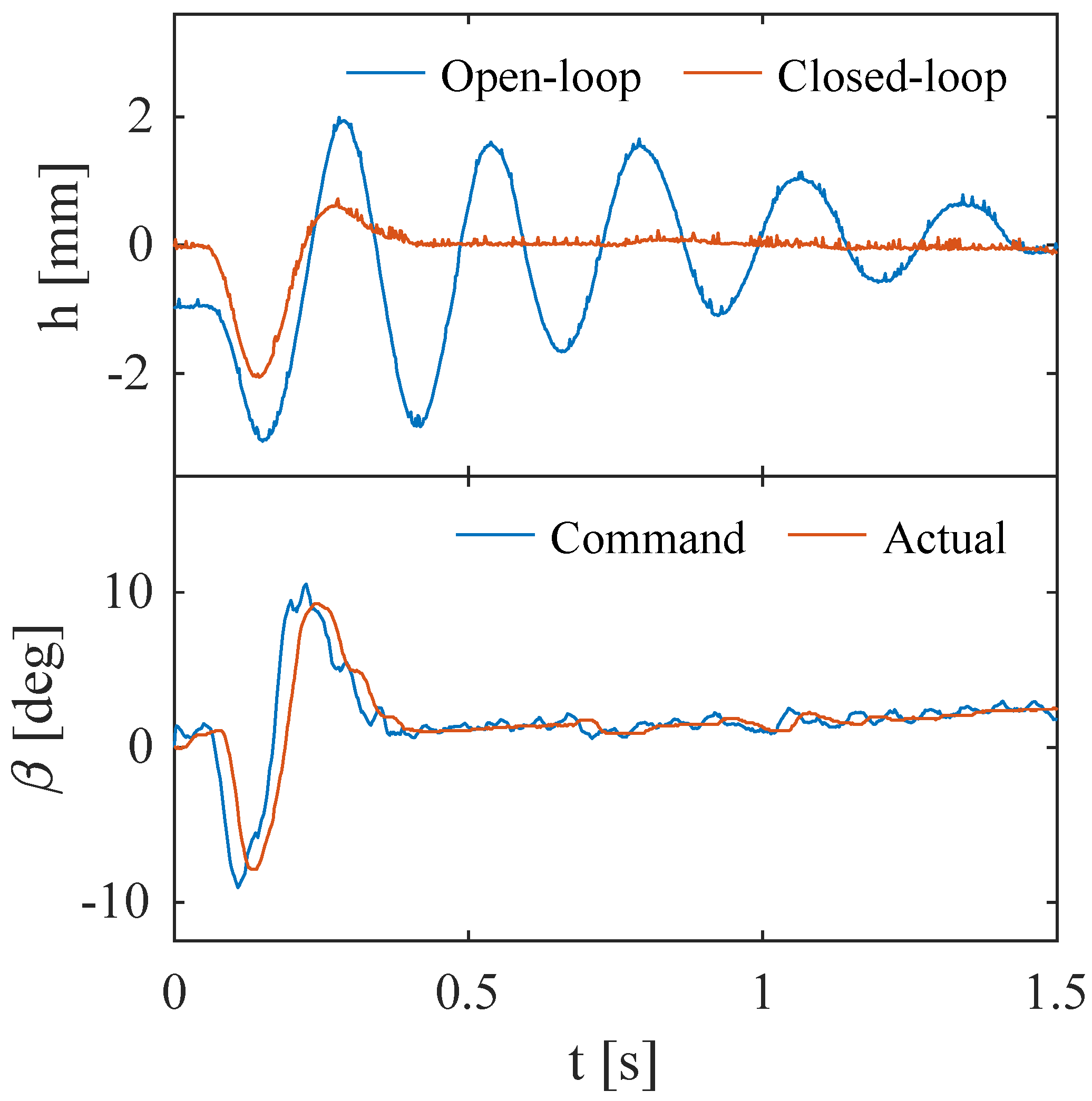
4.2. Flutter Suppression Results
5. Conclusions
6. Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Binder, S.; Wildschek, A.; De Breuker, R. The interaction between active aeroelastic control and structural tailoring in aeroservoelastic wing design. Aerosp. Sci. Technol. 2021, 110, 106516. [Google Scholar] [CrossRef]
- Ricci, S.; Scotti, A.; Cecrdle, J.; Malecek, J. Active control of three-surface aeroelastic model. J. Aircr. 2008, 45, 1002–1013. [Google Scholar] [CrossRef]
- Karpel, M. Design for Active Flutter Suppression and and Gust Alleviation Using State-Space Aeroelastic Modeling. J. Aircr. 1982, 19, 221–227. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Swei, S.; Ting, E. Adaptive Linear Quadratic Gaussian Optimal Control Modification for Flutter Suppression of Adaptive Wing. In Proceedings of the AIAA Infotech @ Aerospace, Kissimmee, FL, USA, 5–9 January 2015; pp. 1–23. [Google Scholar] [CrossRef] [Green Version]
- Fournier, H.; Massioni, P.; Tu Pham, M.; Bako, L.; Vernay, R.; Colombo, M. Robust Gust Load Alleviation of Flexible Aircraft Equipped with Lidar. J. Guid. Control. Dyn. 2022, 45, 58–72. [Google Scholar] [CrossRef]
- Poussot-Vassal, C.; Demourant, F.; Lepage, A.; Le Bihan, D. Gust Load Alleviation: Identification, Control, and Wind Tunnel Testing of a 2-D Aeroelastic Airfoil. IEEE Trans. Control Syst. Technol. 2017, 25, 1736–1749. [Google Scholar] [CrossRef] [Green Version]
- Lhachemi, H.; Chu, Y.; Saussié, D.; Zhu, G. Flutter Suppression for Underactuated Aeroelastic Wing Section: Nonlinear Gain-Scheduling Approach. J. Guid. Control. Dyn. 2017, 40, 2102–2109. [Google Scholar] [CrossRef]
- Sun, B.; Mkhoyan, T.; Van Kampen, E.J.; De Breuker, R.; Wang, X. Vision-Based Nonlinear Incremental Control for A Morphing Wing with Mechanical Imperfections. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 5506–5518. [Google Scholar] [CrossRef]
- Livne, E. Aircraft active flutter suppression: State of the art and technology maturation needs. J. Aircr. 2018, 55, 410–450. [Google Scholar] [CrossRef]
- Mannarino, A.; Dowell, E.H.; Mantegazza, P. An adaptive controller for nonlinear flutter suppression and free-play compensation. JVC/J. Vib. Control 2017, 23, 2269–2290. [Google Scholar] [CrossRef]
- Platanitis, G.; Strganac, T.W. Control of a Nonlinear Wing Section Using Leading- and Trailing-Edge Surfaces. J. Guid. Control. Dyn. 2004, 27, 52–58. [Google Scholar] [CrossRef] [Green Version]
- Mattaboni, M.; Quaranta, G.; Mantegazza, P. Active flutter suppression for a three-surface transport aircraft by recurrent neural networks. J. Guid. Control. Dyn. 2009, 32, 1295–1307. [Google Scholar] [CrossRef]
- Wang, X.; van Kampen, E.; Chu, Q.; Lu, P. Stability Analysis for Incremental Nonlinear Dynamic Inversion Control. J. Guid. Control. Dyn. 2019, 42, 1116–1129. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Van Kampen, E.; Chu, Q.; De Breuker, R. Flexible aircraft gust load alleviation with incremental nonlinear dynamic inversion. J. Guid. Control. Dyn. 2019, 42, 1519–1536. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Mkhoyan, T.; Mkhoyan, I.; De Breuker, R. Seamless Active Morphing Wing Simultaneous Gust and Maneuver Load Alleviation. J. Guid. Control. Dyn. 2021, 44, 1649–1662. [Google Scholar] [CrossRef]
- Dimitriadis, G. Introduction to Nonlinear Aeroelasticity; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Fradkov, A.L.; Miroshnik, I.V.; Nikiforov, V.O. Nonlinear and Adaptive Control of Complex Systems; Springer: Dordrecht, The Netherlands, 1999; Volume 491. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 2002; pp. 423–468. [Google Scholar]
- Schildkamp, R.; Chang, J.; Sodja, J.; De Breuker, R.; Wang, X. Development of an active aeroelastic parametric wing apparatus. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics 2022, IFASD 2022, Madrid, Spain, 13–17 June 2022. [Google Scholar]
- Gjerek, B.; Drazumeric, R.; Kosel, F. A Novel Experimental Setup for Multiparameter Aeroelastic Wind Tunnel Tests. Exp. Tech. 2014, 38, 30–43. [Google Scholar] [CrossRef]
- Theodorsen, T. Report No. 496, general theory of aerodynamic instability and the mechanism of flutter. J. Frankl. Inst. 1935, 219, 766–767. [Google Scholar] [CrossRef]
- Geertsen, J.A. Development of a Gust Generator for a Low Speed Wind Tunnel; TU Delft, ETH Zürich: Delft, The Netherlands, 2020. [Google Scholar]
- Hargrove, W.J. The C-5A Active Lift Distribution Control System. In Proceedings of the NASA Sponsored Symposium on Advanced Control Technology and Its Potential for Future Transport Aircraf; National Aeronautics and Space Administration: Washington, DC, USA, 1975; pp. 325–351. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | |
|---|---|---|---|
| Heave stiffness | 710 | N/m | |
| Pitch stiffness | 3.14 | Nm/rad | |
| Elastic Axis | - |
| (Hz) | Reduction Rate of (%) | Reduction Rate of RMS (%) | ||||
|---|---|---|---|---|---|---|
| Mean | Min | Max | Mean | Min | Max | |
| 3 | 38.3 | 33.8 | 44.6 | 51.1 | 46.0 | 54.5 |
| 3.5 | 29.3 | 27.0 | 30.8 | 58.7 | 58.7 | 59.7 |
| 4 | 32.4 | 31.5 | 34.4 | 63.5 | 61.2 | 64.1 |
| 4.5 | 33.2 | 29.8 | 35.8 | 61.7 | 44.0 | 67.4 |
| 5 | 44.2 | 40.6 | 46.7 | 71.4 | 63.0 | 72.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schildkamp, R.; Chang, J.; Sodja, J.; De Breuker, R.; Wang, X. Incremental Nonlinear Control for Aeroelastic Wing Load Alleviation and Flutter Suppression. Actuators 2023, 12, 280. https://doi.org/10.3390/act12070280
Schildkamp R, Chang J, Sodja J, De Breuker R, Wang X. Incremental Nonlinear Control for Aeroelastic Wing Load Alleviation and Flutter Suppression. Actuators. 2023; 12(7):280. https://doi.org/10.3390/act12070280
Chicago/Turabian StyleSchildkamp, Roderick, Jing Chang, Jurij Sodja, Roeland De Breuker, and Xuerui Wang. 2023. "Incremental Nonlinear Control for Aeroelastic Wing Load Alleviation and Flutter Suppression" Actuators 12, no. 7: 280. https://doi.org/10.3390/act12070280
APA StyleSchildkamp, R., Chang, J., Sodja, J., De Breuker, R., & Wang, X. (2023). Incremental Nonlinear Control for Aeroelastic Wing Load Alleviation and Flutter Suppression. Actuators, 12(7), 280. https://doi.org/10.3390/act12070280