
Deviation Sequence Neural Network Control for Path Tracking of Autonomous Vehicles


Abstract
:1. Introduction
2. Deviation Sequence Neural Network Control
2.1. Reformulation of Approximate Function
2.2. Implementation
3. Results
4. Conclusions
- (1)
- Introducing the deviation sequence into the input structure of neural network control improves the generalization and reduces the model complexity and the training burden. As is shown in the theory analysis, it contains more driving scenarios and better future motion tendency and thus can represent multiple states.
- (2)
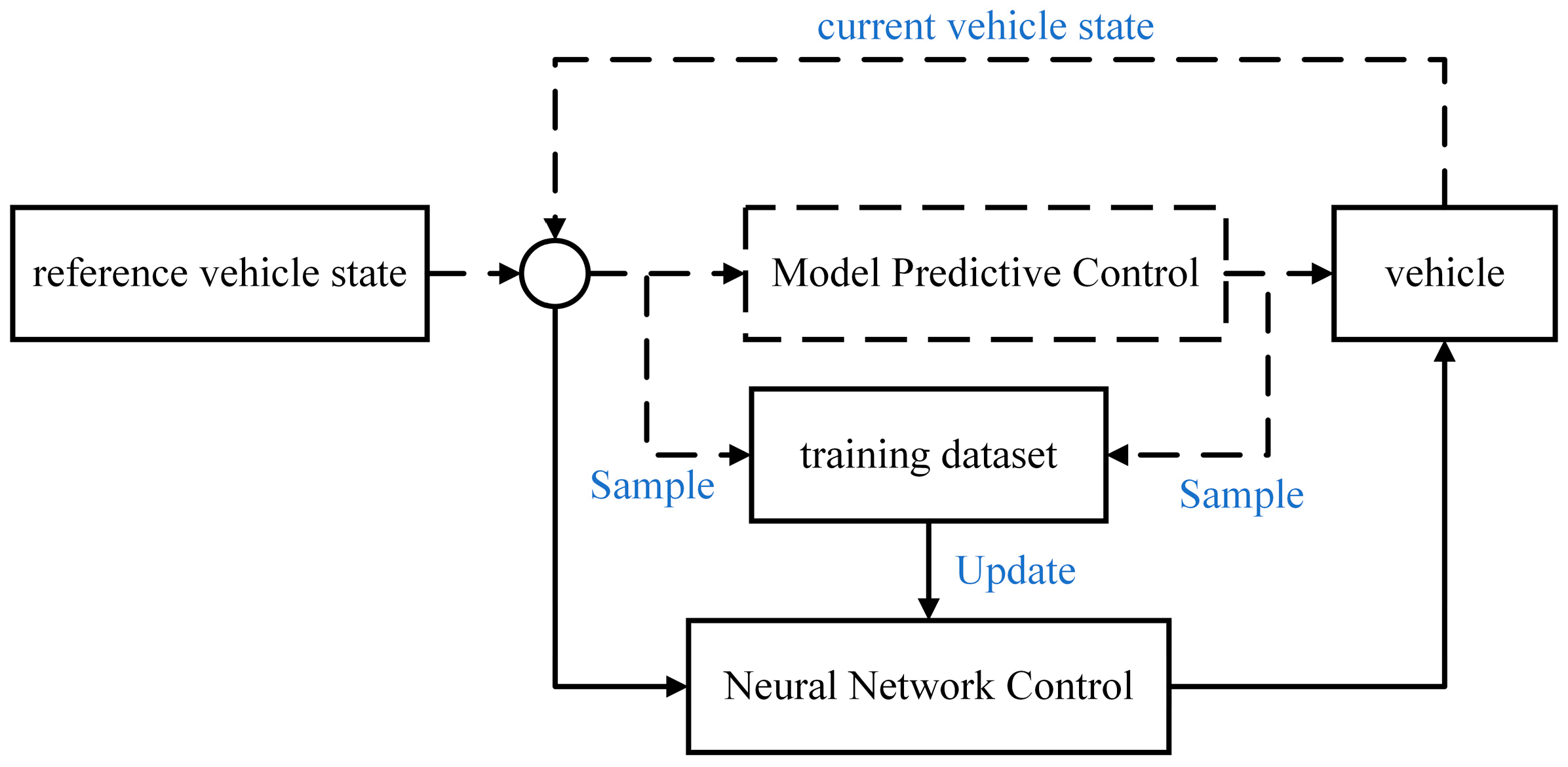
- The proposed structure separates the vehicle dynamic model from the approximation process and adds a computation module for the predictive state, making full use of the real-time vehicle dynamic model. Compared to directly approximating the mapping of states to control inputs, this structure reduces the complexity of the neural network training because it does not need to consider the dynamic model during the approximation process. Additionally, when the dynamic model is changed, an NN trained offline approximates an out-of-date dynamic model and results in an incremental tracking error. This error could be avoided.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Stano, P.; Montanaro, U.; Tavernini, D.; Tufo, M.; Fiengo, G.; Novella, L.; Sorniotti, A. Model predictive path tracking control for automated road vehicles: A review. Annu. Rev. Control 2022, 55, 194–236. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef]
- Al-Mayyahi, A.; Wang, W.; Birch, P. Path tracking of autonomous ground vehicle based on fractional order PID controller optimized by PSO. In Proceedings of the 2015 IEEE 13th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 22–24 January 2015; pp. 109–114. [Google Scholar]
- Xu, S.; Peng, H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 48–58. [Google Scholar] [CrossRef]
- Chatzikomis, C.; Sorniotti, A.; Gruber, P.; Zanchetta, M.; Willans, D.; Balcombe, B. Comparison of path tracking and torque-vectoring controllers for autonomous electric vehicles. IEEE Trans. Intell. Veh. 2018, 3, 559–570. [Google Scholar] [CrossRef]
- Peng, H.N.; Wang, W.D.; An, Q.; Xiang, C.L.; Li, L. Path Tracking and Direct Yaw Moment Coordinated Control Based on Robust MPC With the Finite Time Horizon for Autonomous Independent-Drive Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 6053–6066. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Q.Q.; Wang, C.Q.; Wang, S.Y.; Liu, J.Q.; Wang, Q. Switched model predictive controller for path tracking of autonomous vehicle considering rollover stability. Veh. Syst. Dyn. 2022, 60, 4166–4185. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, X. Autonomous path tracking control of intelligent electric vehicles based on lane detection and optimal preview method. Expert Syst. Appl. 2019, 121, 38–48. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, K.; Gao, F.; Zhao, F. Research on path planning and path tracking control of autonomous vehicles based on improved APF and SMC. Sensors 2023, 23, 7918. [Google Scholar] [CrossRef]
- Gámez Serna, C.; Lombard, A.; Ruichek, Y.; Abbas-Turki, A. GPS-based curve estimation for an adaptive pure pursuit algorithm. In Advances in Computational Intelligence: 15th Mexican International Conference on Artificial Intelligence, MICAI 2016, Cancún, Mexico, October 23–28, 2016, Proceedings, Part I; Springer: Cham, Switzerland, 2016; pp. 497–511. [Google Scholar]
- Zhu, Q.; Huang, Z.; Liu, D.; Dai, B. An adaptive path tracking method for autonomous land vehicle based on neural dynamic programming. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1429–1434. [Google Scholar]
- Siampis, E.; Velenis, E.; Gariuolo, S.; Longo, S. A real-time nonlinear model predictive control strategy for stabilization of an electric vehicle at the limits of handling. IEEE Trans. Control Syst. Technol. 2017, 26, 1982–1994. [Google Scholar] [CrossRef]
- Lee, J.; Chang, H.-J. Analysis of explicit model predictive control for path-following control. PLoS ONE 2018, 13, e0194110. [Google Scholar] [CrossRef]
- Ferreau, H.J.; Kirches, C.; Potschka, A.; Bock, H.G.; Diehl, M. qpOASES: A parametric active-set algorithm for quadratic programming. Math. Program. Comput. 2014, 6, 327–363. [Google Scholar] [CrossRef]
- Richter, S.; Jones, C.N.; Morari, M. Real-time input-constrained MPC using fast gradient methods. In Proceedings of the 48th IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 7387–7393. [Google Scholar]
- Wang, Y.; Boyd, S. Fast model predictive control using online optimization. IEEE Trans. Control. Syst. Technol. 2009, 18, 267–278. [Google Scholar] [CrossRef]
- Gupta, A.; Falcone, P. Low-complexity explicit MPC controller for vehicle lateral motion control. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2839–2844. [Google Scholar]
- Schulze, L.; Bertol, D.W.; Sebem, R. Conventional and Explicit MPC Applied to Robotic Systems: A Computational Cost Evaluation. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Puglia, Italy, 22–25 June 2021; pp. 861–866. [Google Scholar]
- Stanojev, O.; Markovic, U.; Aristidou, P.; Hug, G.; Callaway, D.; Vrettos, E. MPC-Based Fast Frequency Control of Voltage Source Converters in Low-Inertia Power Systems. IEEE Trans. Power Syst. 2022, 37, 3209–3220. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Robust model predictive control: A survey. In Robustness in Identification and Control; Springer: Berlin/Heidelberg, Germany, 2007; pp. 207–226. [Google Scholar]
- Li, X.; Liu, C.; Chen, B.; Jiang, J. Robust Adaptive Learning-Based Path Tracking Control of Autonomous Vehicles Under Uncertain Driving Environments. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20798–20809. [Google Scholar] [CrossRef]
- Kuutti, S.; Bowden, R.; Jin, Y.; Barber, P.; Fallah, S. A survey of deep learning applications to autonomous vehicle control. IEEE Trans. Intell. Transp. Syst. 2020, 22, 712–733. [Google Scholar] [CrossRef]
- Pomerleau, D.A. Alvinn: An autonomous land vehicle in a neural network. Adv. Neural Inf. Process. Syst. 1988, 1, 305–313. [Google Scholar]
- Bojarski, M.; Del Testa, D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Jackel, L.D.; Monfort, M.; Muller, U.; Zhang, J. End to end learning for self-driving cars. arXiv 2016, arXiv:07316. [Google Scholar]
- Chang, M.-H.; Wu, Y.-C. Speed control of electric vehicle by using type-2 fuzzy neural network. Int. J. Mach. Learn. Cybern. 2021, 13, 1647–1660. [Google Scholar] [CrossRef]
- Ghoniem, M.; Awad, T.; Mokhiamar, O. Control of a new low-cost semi-active vehicle suspension system using artificial neural networks. Alex. Eng. J. 2020, 59, 4013–4025. [Google Scholar] [CrossRef]
- Gupta, A.; Murali, A.; Gandhi, D.P.; Pinto, L. Robot learning in homes: Improving generalization and reducing dataset bias. Adv. Neural Inf. Process. Syst. 2018, 31, 9094–9104. [Google Scholar]
- Drgoňa, J.; Picard, D.; Kvasnica, M.; Helsen, L. Approximate model predictive building control via machine learning. Appl. Energy 2018, 218, 199–216. [Google Scholar] [CrossRef]
- Karg, B.; Lucia, S. Deep learning-based embedded mixed-integer model predictive control. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 2075–2080. [Google Scholar]
- Lovelett, R.J.; Dietrich, F.; Lee, S.; Kevrekidis, I.G. Some manifold learning considerations toward explicit model predictive control. AIChE J. 2020, 66, e16881. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Spielberg, N.A.; Brown, M.; Gerdes, J.C. Neural Network Model Predictive Motion Control Applied to Automated Driving With Unknown Friction. IEEE Trans. Control Syst. Technol. 2022, 30, 1934–1945. [Google Scholar] [CrossRef]
- Chen, S.W.; Wang, T.; Atanasov, N.; Kumar, V.; Morari, M. Large scale model predictive control with neural networks and primal active sets. Automatica 2022, 135, 109947. [Google Scholar] [CrossRef]
- Chen, S.; Saulnier, K.; Atanasov, N.; Lee, D.D.; Kumar, V.; Pappas, G.J.; Morari, M. Approximating explicit model predictive control using constrained neural networks. In Proceedings of the 2018 Annual American control conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 1520–1527. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Mass | m | 1830 kg |
| Yaw inertia moment | Iz | 3234 kg·m2 |
| Front wheel base | a | 1400 mm |
| Rear wheel base | b | 1650 mm |
| Front axle cornering stiffness | Cf | −125,374 N/rad |
| Rear axle cornering stiffness | Cr | −125,374 N/rad |
| Controller | Module | Computation Time (s) |
|---|---|---|
| MPC | Longitudinal controller | 11.990 |
| Vehicle dynamic model | 5.740 | |
| Predictive state calculate | 0.988 | |
| QP solver | 9.502 | |
| NNC | Longitudinal controller | 12.735 |
| Vehicle dynamic model | 5.548 | |
| Predictive state calculate | 0.754 | |
| Network | 0.333 |
| Deviation | Module | Mean Tracking Error |
|---|---|---|
| Position | MPC | 0.2236 m |
| NN | 0.2234 m | |
| NNFH | 0.2052 m | |
| NNSH | 0.1912 m | |
| Yaw angle | MPC | 0.0299 rad |
| NN | 0.0299 rad | |
| NNFH | 0.0300 rad | |
| NNSH | 0.0299 rad |
| Parameter | Symbol | Value |
|---|---|---|
| Mass | m | 1140 kg |
| Yaw inertia moment | Iz | 1020 kg·m2 |
| Front wheel base | a | 1165 mm |
| Rear wheel base | b | 1165 mm |
| Front axle cornering stiffness | Cf | −29,517 N/rad |
| Rear axle cornering stiffness | Cr | −29,517 N/rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, L.; Mao, Y.; Zhang, F.; Lin, B.; Zhang, Y. Deviation Sequence Neural Network Control for Path Tracking of Autonomous Vehicles. Actuators 2024, 13, 101. https://doi.org/10.3390/act13030101
Su L, Mao Y, Zhang F, Lin B, Zhang Y. Deviation Sequence Neural Network Control for Path Tracking of Autonomous Vehicles. Actuators. 2024; 13(3):101. https://doi.org/10.3390/act13030101
Chicago/Turabian StyleSu, Liang, Yiyuan Mao, Feng Zhang, Baoxing Lin, and Yong Zhang. 2024. "Deviation Sequence Neural Network Control for Path Tracking of Autonomous Vehicles" Actuators 13, no. 3: 101. https://doi.org/10.3390/act13030101
APA StyleSu, L., Mao, Y., Zhang, F., Lin, B., & Zhang, Y. (2024). Deviation Sequence Neural Network Control for Path Tracking of Autonomous Vehicles. Actuators, 13(3), 101. https://doi.org/10.3390/act13030101