

In-Flight Calibration of Lorentz Actuators for Non-Contact Close-Proximity Formation Satellites with Cooperative Control


Abstract
:1. Introduction
- (1)
- Having noticed that most of the existing calibration methods for NCLAs are carried out on the ground, this article proposes a NCLA in-flight calibration method.
- (2)
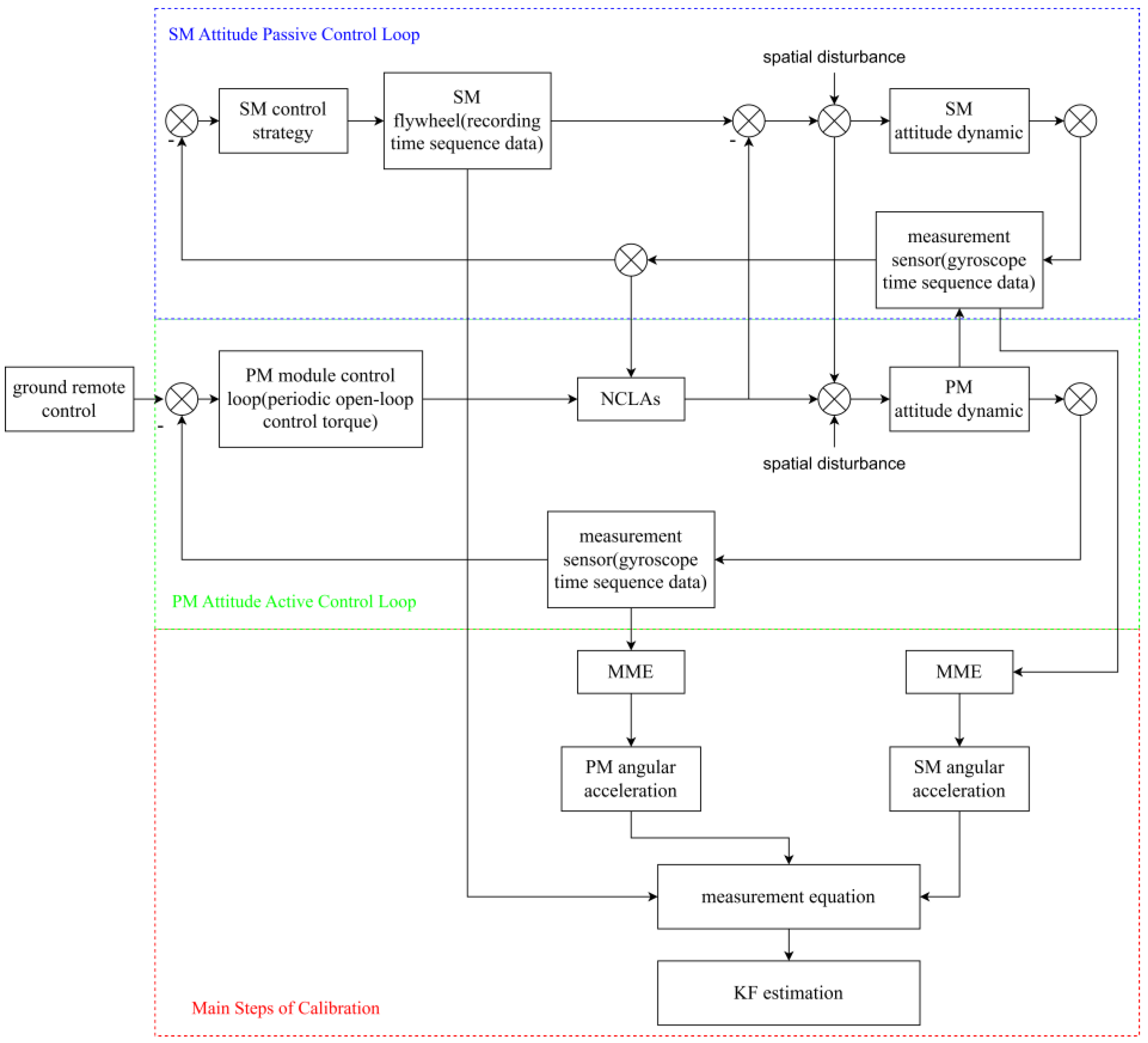
- This article designs a two-module close-proximity formation cooperative control strategy, which the angular acceleration is estimated by MME algorithm and the final results are filtered by the KF algorithm to improve accuracy.
2. Hierarchical Architecture
2.1. Overall Structure
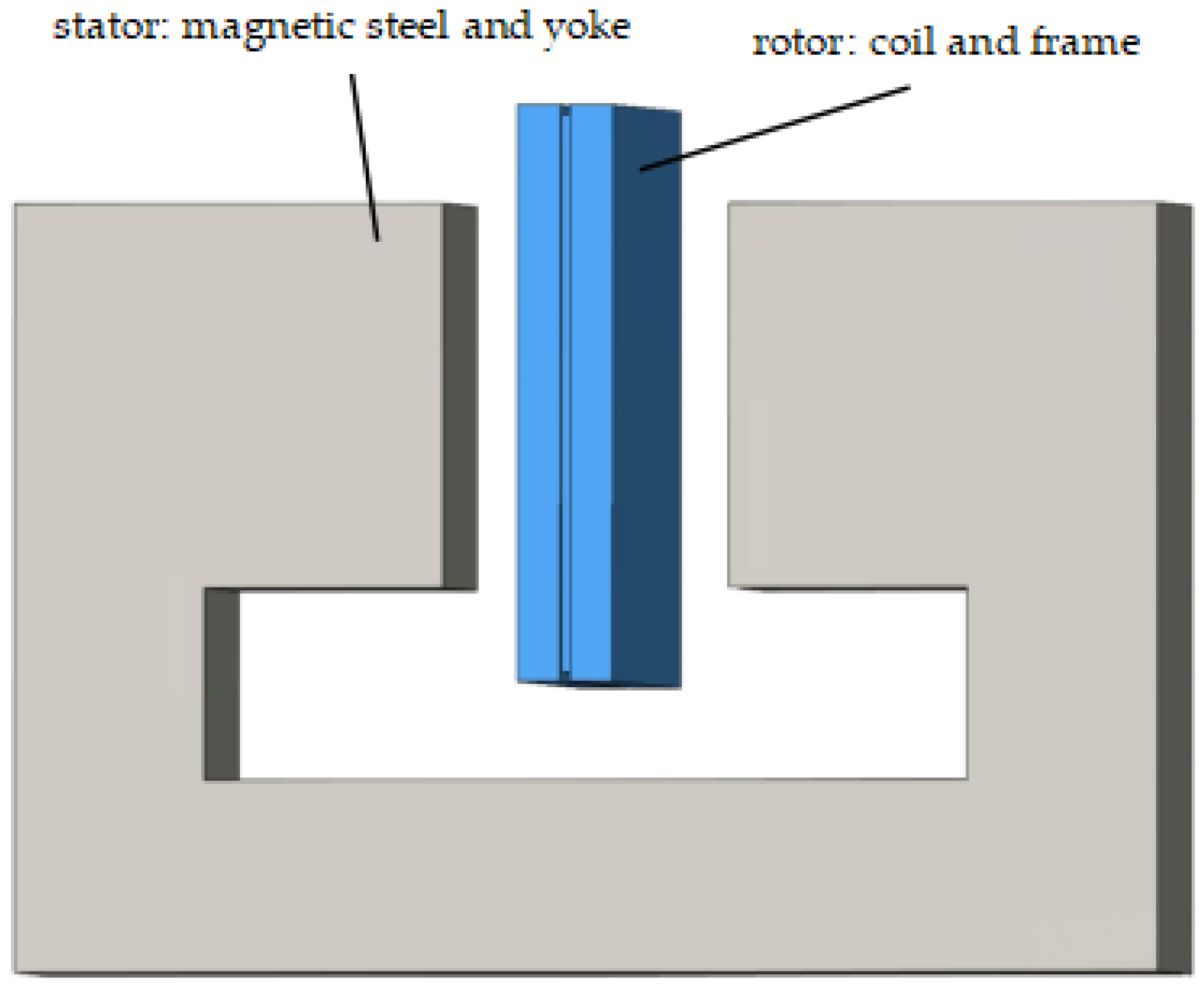
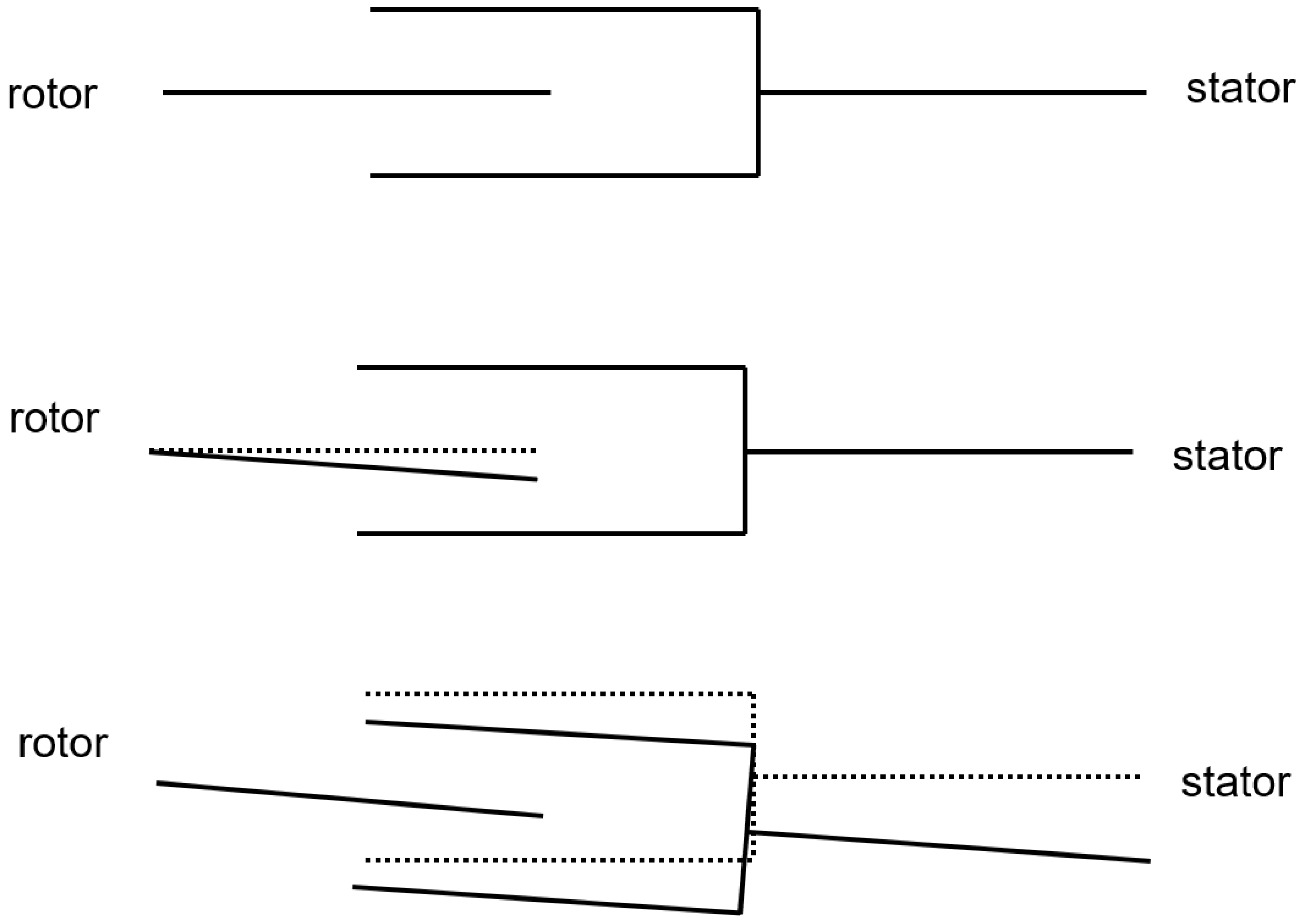
2.2. Non-Contact Actuator
3. Calibration Architecture Design
3.1. Dynamic Model
- (1)
- J2000.0 Earth-centered inertial coordinate system:
- (2)
- PM orbit coordinate system:
- (3)
- PM body coordinate system:
- (4)
- SM body coordinate system:
3.2. Calibration Method with Cooperative Control
4. Calibration Algorithm Design
4.1. MME-Based Angular Acceleration Estimation
4.2. KF-Based In-Flight Calibration
5. Simulation Results
5.1. Initial Conditions
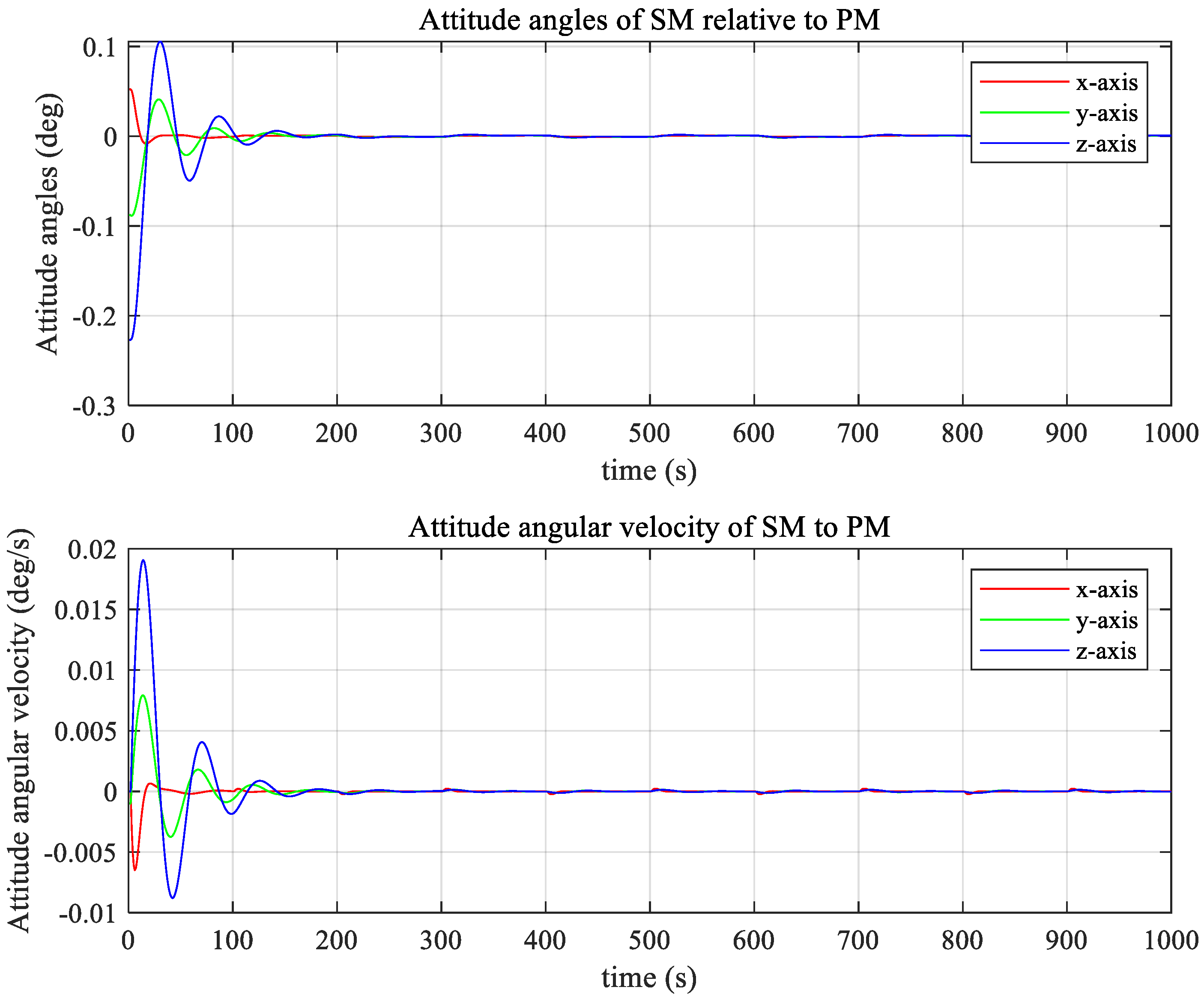
5.2. Validation of the Effectiveness of Cooperative Control
5.3. Calibration Accuracy Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kruse, F.A.; Baugh, W.M.; Perry, S.L. Validation of Digital Globe WorldView-3 Earth imaging satellite shortwave infrared bands for mineral mapping. J. Appl. Remote Sens. 2015, 9, 096044. [Google Scholar] [CrossRef]
- Villalba-Alumbreros, G.; Lopez-Pascual, D.; Valiente-Blanco, I.; Diez-Jimenez, E. Power Saving in Magnetorquers by Operating in Cryogenic Environments. Actuators 2023, 12, 181. [Google Scholar] [CrossRef]
- Preumont, A. Active Damping, Vibration Isolation, and Shape Control of Space Structures: A Tutorial. Actuators 2023, 12, 122. [Google Scholar] [CrossRef]
- Pedreiro, N. Spacecraft Architecture for Disturbance-Free Payload. J. Guid. Control Dyn. 2012, 26, 794–804. [Google Scholar] [CrossRef]
- Pedreiro, N.; Carrier, A.C.; Lorell, K.R.; Roth, D. Disturbance-free payload concept demonstration. In Proceedings of the AIAA Astrodynamics Specialist Conference, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Zhang, W.; Zhao, Y.B.; Liao, H.; Zhao, H. Design of Motion-Static Isolation Master-Slave Cooperative Control for Dual Hypersatellite Platform. Shanghai Aerosp. J. 2014, 30, 7–11. [Google Scholar]
- Liao, H.; Wang, D.; Ren, Y.; Wang, W. Conceptual design and control method for a non-contact annular electromagnetic stabilized satellite platform. Chin. J. Aeronaut. 2023, 37, 256–270. [Google Scholar] [CrossRef]
- Tang, Z.X.; Xu, Y.F.; Jiang, B.; Liao, H. Integrated structure and precision control of flat voice coil actuator for non-contact close-proximity formation satellite. J. Eng. 2019, 15, 566–570. [Google Scholar] [CrossRef]
- Tang, Z.X.; Yao, C.; He, W.; Zhou, L.; Zhao, H.; Zhao, Y.B. Design and Output Characteristics Testing of High-Precision Non-contact Magnetic Levitation Mechanism. Shanghai Aerosp. J. 2020, 1, 135–141. [Google Scholar]
- Jin, T.; Kang, G.; Cai, J.; Jia, S.; Yang, J.; Zhang, X.; Zhang, Z.; Li, L.; Liu, F. Integrated Control Scheme for an Improved Disturbance-Free Payload Spacecraft. Aerospace 2022, 9, 571. [Google Scholar] [CrossRef]
- Kong, Y.; Huang, H. Performance enhancement of disturbance-free payload with a novel design of architecture and control. Acta Astronaut. 2019, 15, 238–249. [Google Scholar] [CrossRef]
- Yuan, Y.H.; Geng, Y.H.; Chen, X.Q. Research on In-flight Calibration Algorithm for Star Tracker Using High-precision Gyroscope. J. Syst. Eng. 2008, 30, 120–123. [Google Scholar]
- Cheng, J.; Li, M.; Guan, D.; Wang, T.; Zhang, W. Research on Nonlinear Comprehensive Calibration Algorithm for the Single-Axis Rotation Inertial Navigation System Based on Modified Unscented Kalman Filter. J. Comput. Theor. Nanosci. 2017, 14, 1535–1542. [Google Scholar] [CrossRef]
- Lin, C.J.; Wang, H.C.; Wang, C.C. Automatic calibration of tool center point for six degree of freedom robot. Actuators 2023, 12, 107. [Google Scholar] [CrossRef]
- Hammer, M.D.; Finlay, C.C.; Olsen, N. Applications for CryoSat-2 satellite magnetic data in studies of Earth’s core field variations. Earth Planets Space 2021, 73, 73. [Google Scholar] [CrossRef]
- Pittelkau, M.E. Kalman filtering for spacecraft system alignment calibration. J. Guid. Control Dyn. 2001, 24, 1187–1195. [Google Scholar] [CrossRef]
- Szabo, R.; Ricman, R.S. Robotic Arm Position Computing Method in the 2D and 3D Spaces. Actuators 2023, 12, 112. [Google Scholar] [CrossRef]
- Mook, J.D.; Junkinsl, J. Minimum model error estimation for poorly modeled dynamic systems. J. Guid. Control Dyn. 2012, 11, 256–261. [Google Scholar] [CrossRef]
- Ge, Z.; Huang, P. Nonlinear Recursive Minimum Model Error Estimation. J. Guid. Control Dyn. 2012, 27, 136–141. [Google Scholar] [CrossRef]
- Fraser, C.T.; Ulrich, S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation. Acta Astronaut. 2021, 17, 700–721. [Google Scholar] [CrossRef]
- Zhang, Y.; Sheng, C.; Hu, Q.; Li, M.; Guo, Z.; Qi, R. Dynamic analysis and control application of vibration isolation system with magnetic suspension on satellites. Aerosp. Sci. Technol. 2018, 7, 99–114. [Google Scholar] [CrossRef]
- Liao, H.; Zheng, D.J.; Zhao, Y.B. Three-body Close-tracking Architecture for Attitude and Drag-free Control of Gravity Satellite. J. Astronaut. 2022, 43, 1499–1510. [Google Scholar]
- Liao, H.; Xu, Y.; Zhu, Z.; Deng, Y.; Zhao, Y. A new design of drag-free and attitude control based on non-contact satellite. ISA Trans. 2019, 88, 62–72. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Cheng, W.; You, W.; Chen, X.; Zhang, J.; Li, C.; Fang, C. Levitated-body ultra-high pointing accuracy and stability satellite platform of the CHASE mission. Sci. China Phys. Mech. 2022, 65, 289604. [Google Scholar] [CrossRef]
- Wang, J. Research on Integrated Control Method of Disturbance Isolation Load and Satellite Platform; Harbin Institute of Technology: Harbin, China, 2016. [Google Scholar]
- Kim, J.J.; Mueller, M.; Martinez, T.; Agrawal, B. Impact of large field angles on the requirements for deformable mirror in imaging satellites. Acta Astronaut. 2018, 14, 44–50. [Google Scholar] [CrossRef]
- Xia, W.; Dou, F.; Long, Z. A Disturbance Force Compensation Framework for a Magnetic Suspension Balance System. Actuators 2023, 12, 98. [Google Scholar] [CrossRef]
- Echavarria, C. An Intelligent Nonlinear System Identification Method with an Application to Condition Monitoring. Bachelor’s Thesis, RIT, New York, NY, USA, 2015. [Google Scholar]
- Hu, C.; Wang, Z.; Taghavifar, H.; Na, J.; Qin, Y.; Guo, J.; Wei, C. MME-EKF-Based Path-Tracking Control of Autonomous Vehicles Considering Input Saturation. IEEE Trans. Veh. 2019, 68, 5246–5259. [Google Scholar] [CrossRef]
- Kerber, F.; Hurlebaus, S.; Beadle, B.; Stöbener, U. Control concepts for an active vibration isolation system. J. Mech. Syst. Signal Process. 2007, 21, 3042–3059. [Google Scholar] [CrossRef]
- Wang, B.L.; Liao, H.; Han, Y. In-flight Calibration of Satellite Center of Mass Based on MME/KF Algorithm. J. Astronaut. Sci. 2010, 9, 2150–2156. [Google Scholar]
- Cheng, J.W.; Li, J.X. Design and Implementation of Software Platform to Evaluate Kalman Filter Algorithm. J. Syst. Simul. 2023, 25, 2567–2574. [Google Scholar]
- Zhang, H.J.; Liao, H.; Gu, X.M. In-flight Calibration Algorithm of Electric Propulsion Thrust based on MME/KF. Spacer. Environ. Eng. J. 2011, 28, 337–343. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Symbol | Meaning |
|---|---|---|---|
| B | magnetic induction intensity | estimated value of the PM angular acceleration | |
| θ | angle between the magnetic bar and the magnetic field | estimated value of the model error | |
| f | Lorentz force | ωobs | measurement information from the gyroscopes installed on the PM |
| i | energizing current | Rw | covariance matrix of the measurement information from the gyroscopes |
| l | length of the coil in the magnetic field | estimated value of the PM angular velocity | |
| Jp | moment of inertia of the PM | W | a third-order model weighting matrix |
| qpo | quaternion representing the attitude of the PM relative to the orbit system | L | 3 × 8 matrices representing the installation positions of the NCLAs in the PM coordinate system |
| angular velocity of the PM body relative to the orbit system | D | 3 × 8 matrices representing the installation directions of the NCLAs in the PM coordinate system | |
| angular velocity of the orbit system relative to the inertial system | F(tk) | thrust magnitude generated by each NCLA at time tk | |
| absolute angular velocity of the PM relative to the inertial system | AT(tk) | control torque matrix of the NCLAs at time tk | |
| coordinate transformation matrix from the orbit system to the PM body system | v(tk) | external disturbance torques and measurement noise | |
| Tcp | control torque applied to the PM | state variables | |
| Tdp | disturbance torque acting on the PM. | P(t0) | estimate covariance matrix |
| Js | moment of inertia matrix of the SM | P(tk−1) | previous posterior covariance matrix |
| qsp | quaternion representing the attitude of the SM relative to the PM | P(tk/k−1) | one-step estimate error covariance matrix |
| absolute angular velocity vector of the SM relative to the inertial system | state transition matrix | ||
| the angular velocity of the SM rotating relative to the PM project to the inertia system | K(tk) | Kalman gain matrix | |
| rotational velocity of the SM relative to the PM project to the SM coordinate system | R(tk) | covariance matrix of the measurement noise v(tk) | |
| transformation matrix from the PM to the SM | H(tk) | measurement transition matrix | |
| Tcs | control torque applied to the SM | Dc(tk) | attitude control commands |
| Tds | disturbance torque acting on the SM. | I | identity matrix |
| Kpp and Kdp | PD controller parameters of the PM, respectively. | vector part of the SM’s attitude quaternion under the SM body coordinate system | |
| Kps and Kds | PD controller parameters of the SM, respectively. | Er(tk) | filtering error |
| k | driving parameter | Er | filtering accuracy |
| Jfw | moment of inertia of the flywheel | angular acceleration of the flywheel relative to the SM. | |
| mfw | mass of flywheel, | rfw | radius of flywheel. |
| Parameter | Value | |
|---|---|---|
| Initial orbital elements | Position vectors (m) | |
| Velocity vectors (m/s) | ||
| NCLA | Star sensor noise | 1″ |
| Gyro noise | 0.01°/h | |
| Linear range | ±1° | |
| NCCPFS | Atmospheric drag coefficient | 2.2 |
| Earth gravity model | TJGRACE02S | |
| Inertia matrix of the PM (kg·m2) | ||
| Inertia matrix of the SM (kg·m2) | ||
| Inertia matrix of the flywheel (kg·m2) | ||
| Solar radiation pressure (Pa) | 4.5605 × 10−6 | |
| Parameter | Value | |
|---|---|---|
| Control parameter | PM PD controller parameters | Kpp = 10.23 |
| Kdp = 23.23 | ||
| SM PD controller parameters | Kps = 10.23 | |
| Kds = 23.23 | ||
| MME Weighting matrix | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, H.; Song, M.; Weng, C.; Wang, D. In-Flight Calibration of Lorentz Actuators for Non-Contact Close-Proximity Formation Satellites with Cooperative Control. Actuators 2024, 13, 129. https://doi.org/10.3390/act13040129
Liao H, Song M, Weng C, Wang D. In-Flight Calibration of Lorentz Actuators for Non-Contact Close-Proximity Formation Satellites with Cooperative Control. Actuators. 2024; 13(4):129. https://doi.org/10.3390/act13040129
Chicago/Turabian StyleLiao, He, Mingxuan Song, Chenglin Weng, and Daixin Wang. 2024. "In-Flight Calibration of Lorentz Actuators for Non-Contact Close-Proximity Formation Satellites with Cooperative Control" Actuators 13, no. 4: 129. https://doi.org/10.3390/act13040129
APA StyleLiao, H., Song, M., Weng, C., & Wang, D. (2024). In-Flight Calibration of Lorentz Actuators for Non-Contact Close-Proximity Formation Satellites with Cooperative Control. Actuators, 13(4), 129. https://doi.org/10.3390/act13040129