
Comparison of Magnetostrictive-Actuated Semi-Active Control Methods Based on Synchronized Switching


Abstract
:1. Introduction
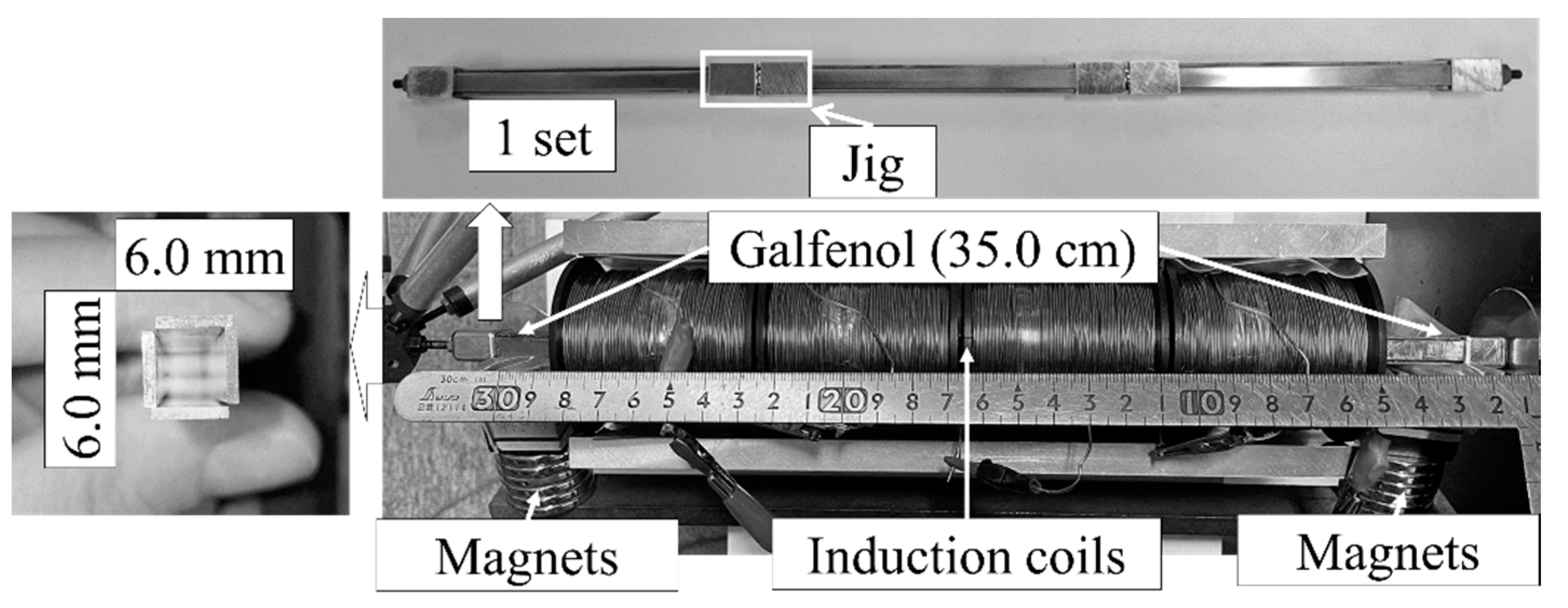
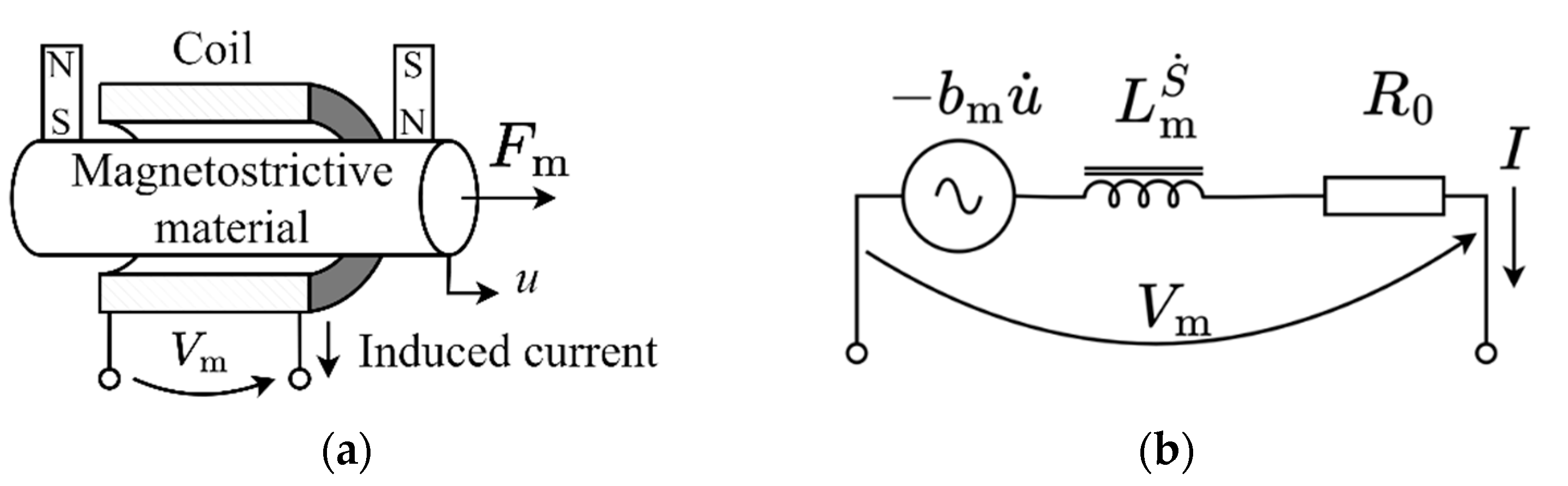
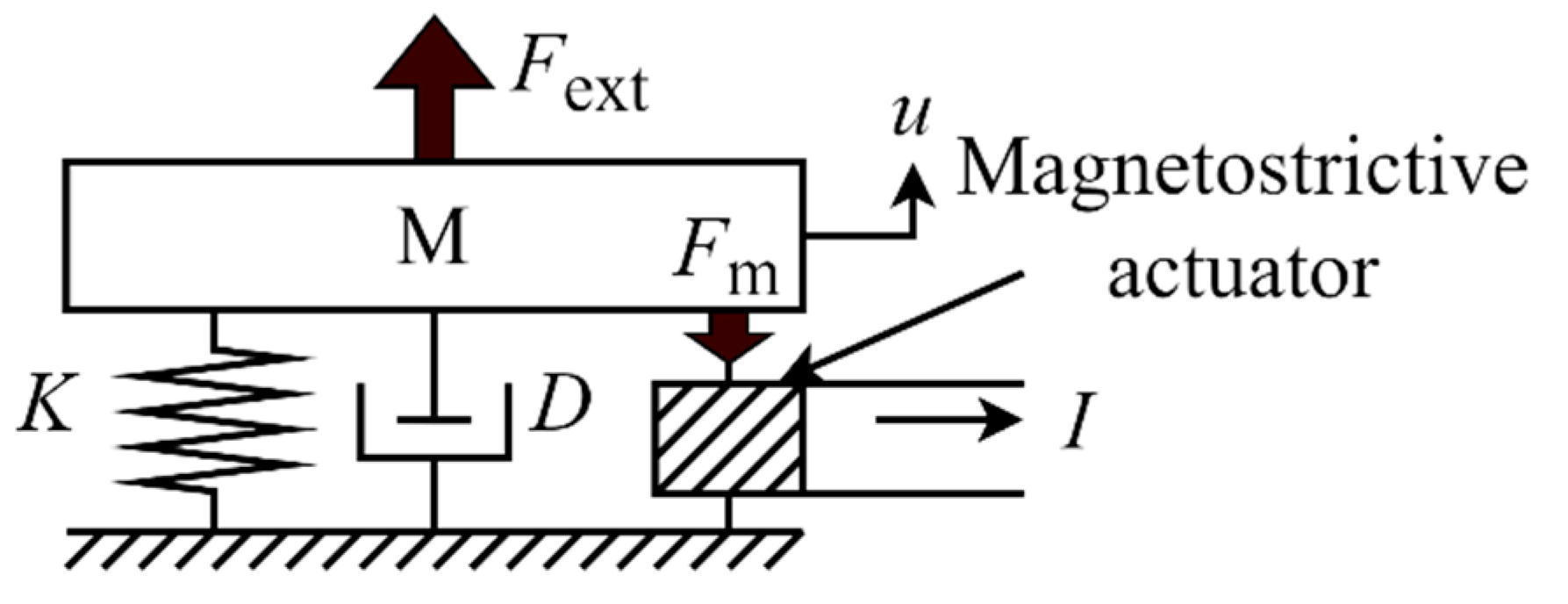
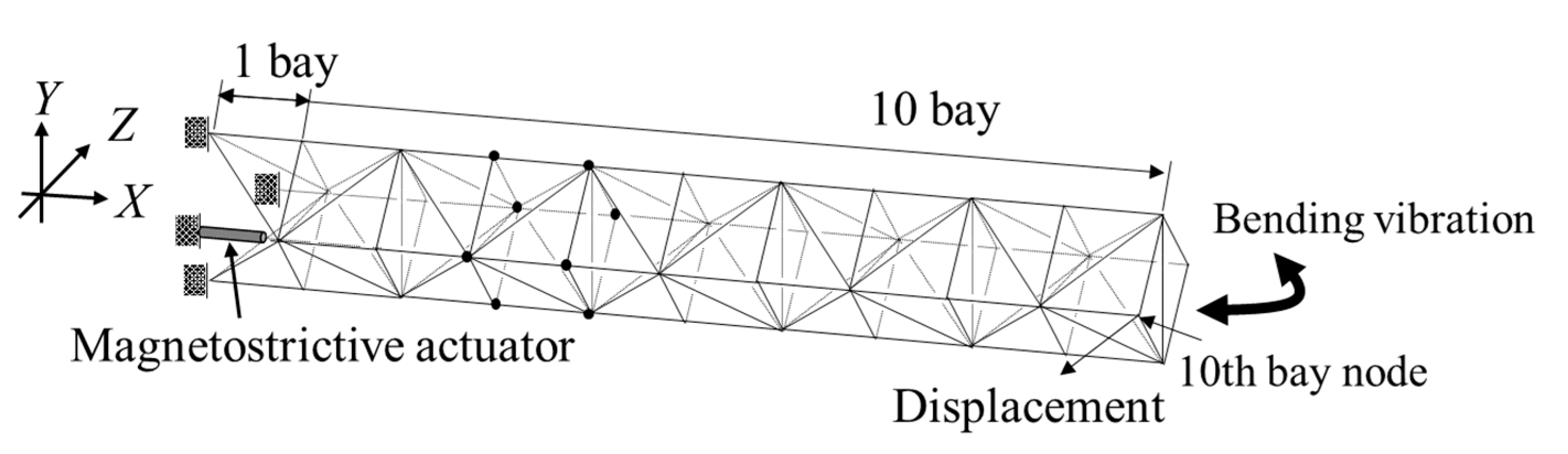
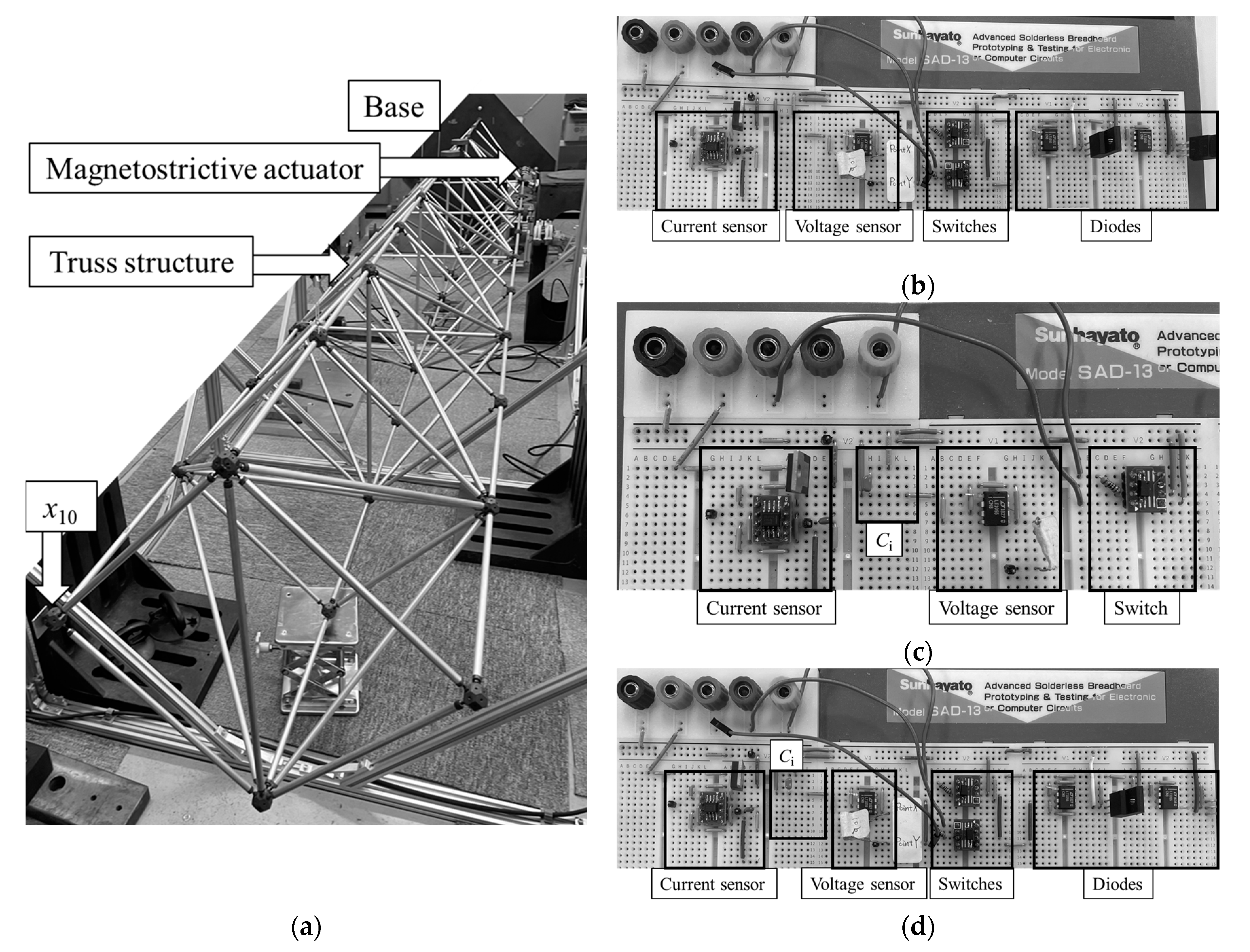
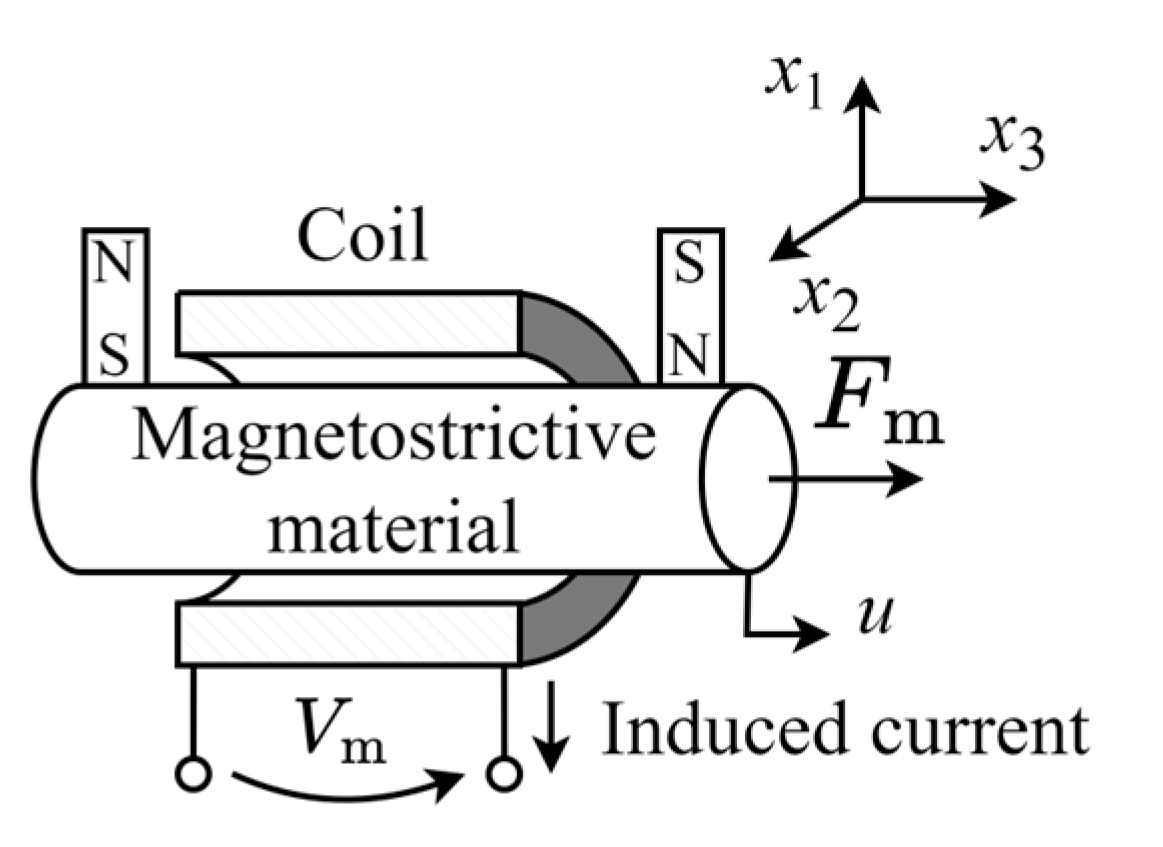
2. Magnetostrictive Actuator
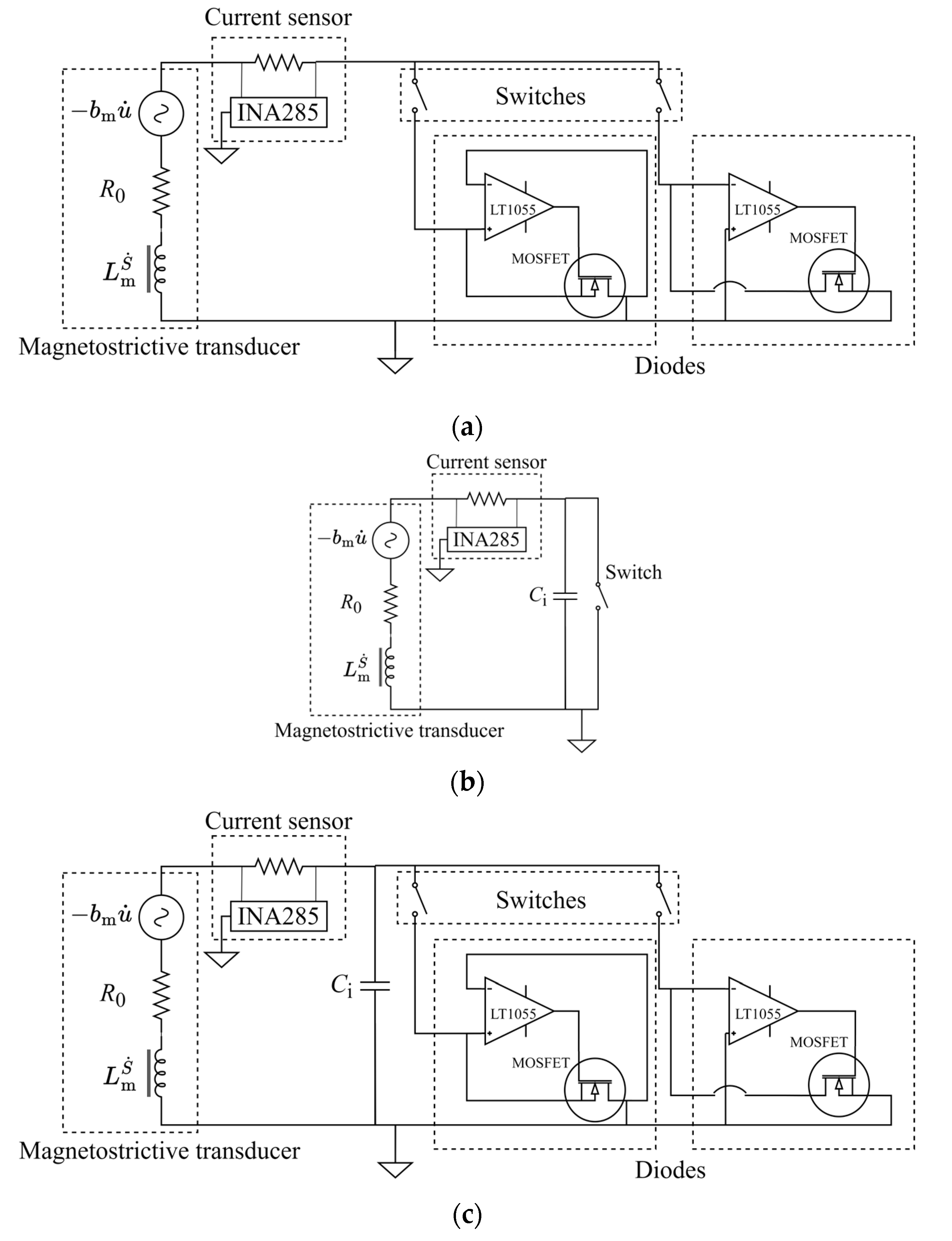
3. Synchronized Switching Circuits
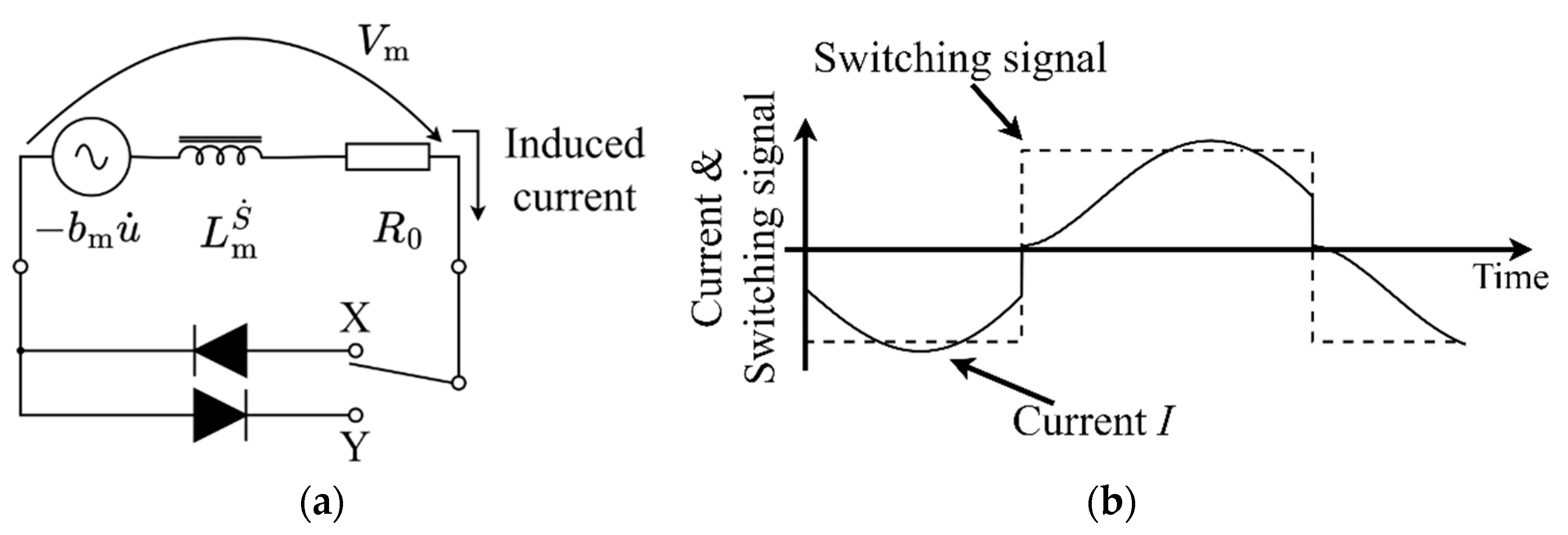
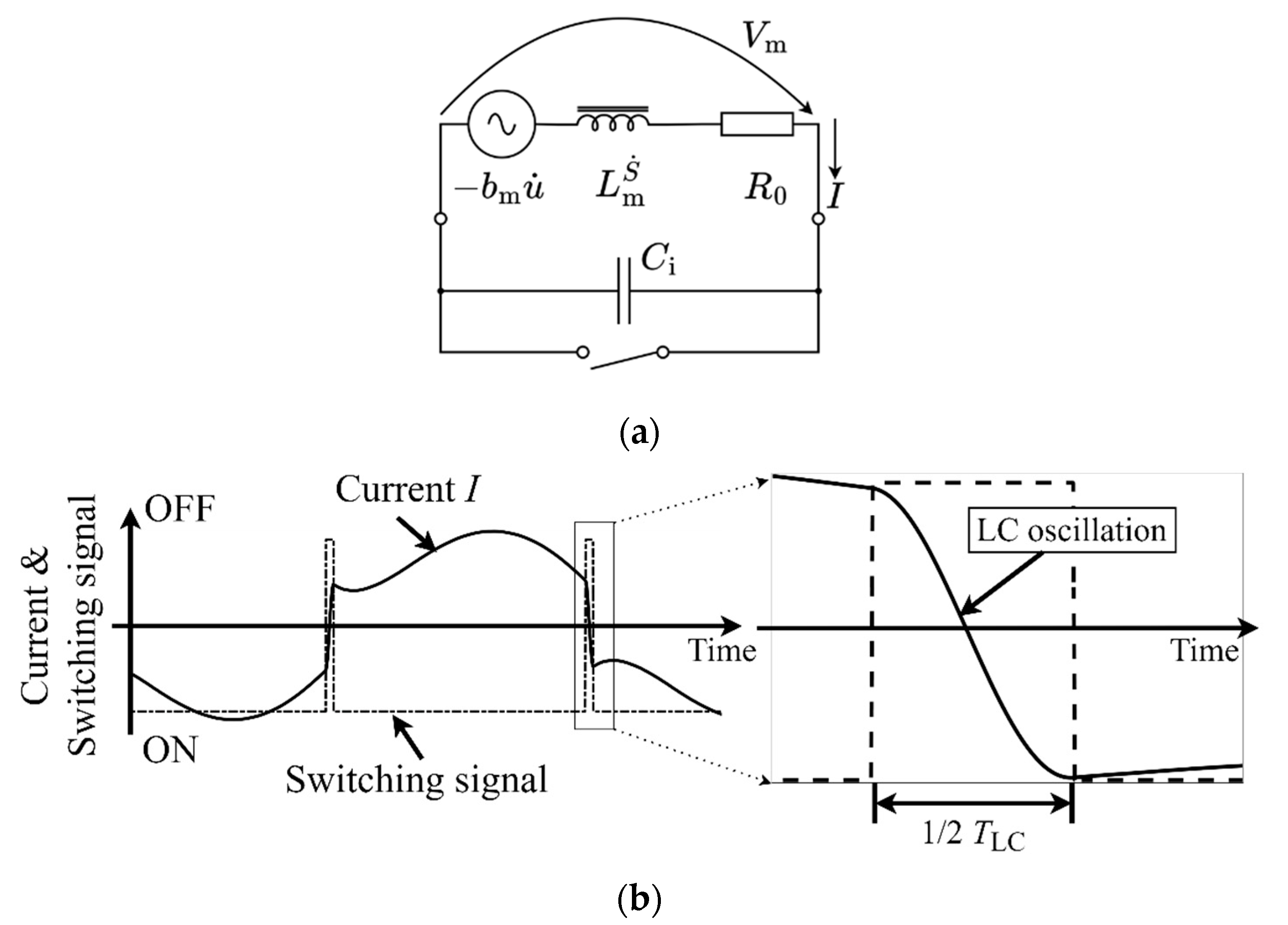
3.1. Semi-Active Shunt Circuit (Circuit 1)
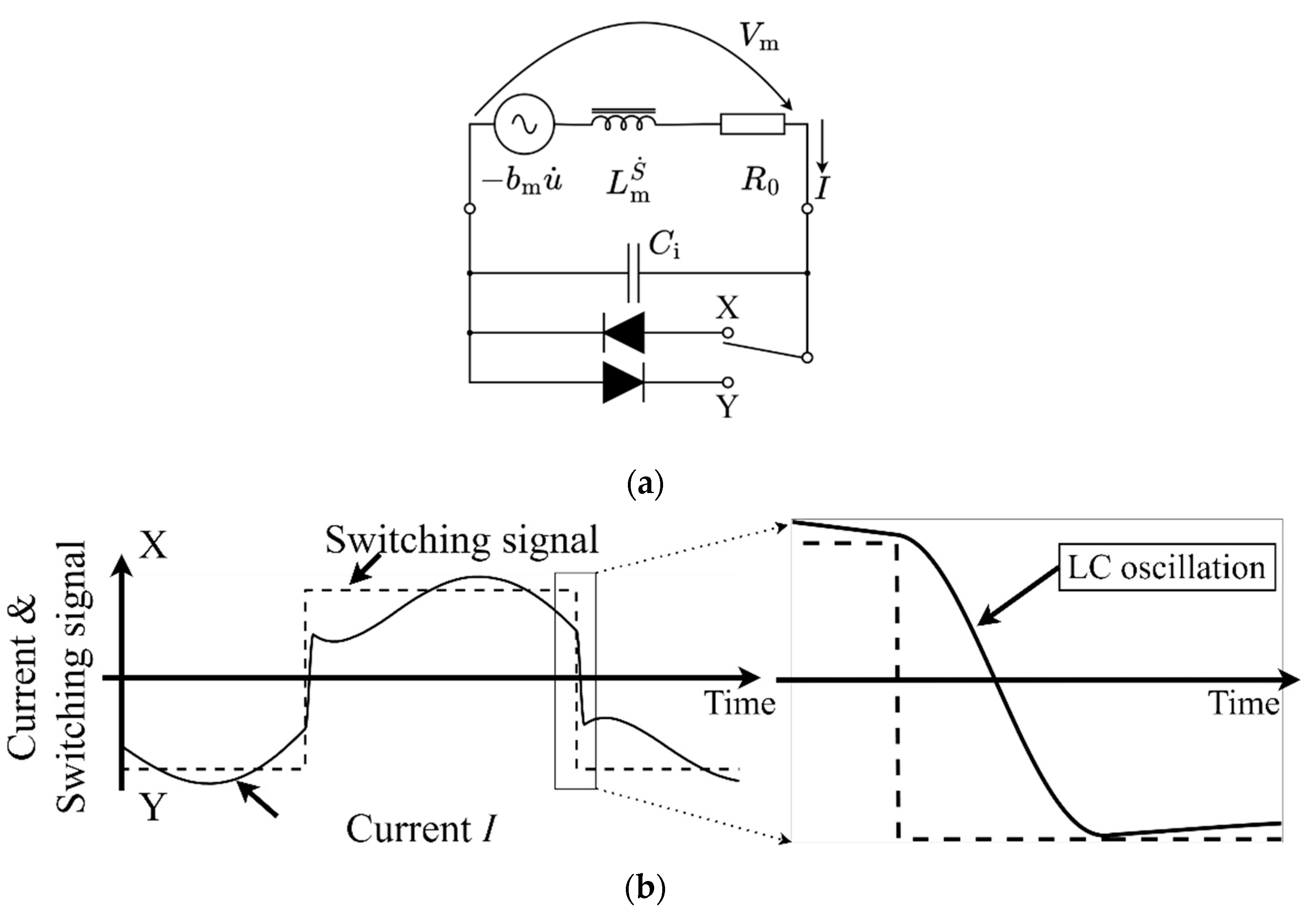
3.2. Semi-Active Current Inversion and Amplification Circuit (Circuit 2)
3.3. Semi-Active Automatic Current Inversion and Amplification Circuit (Circuit 3)
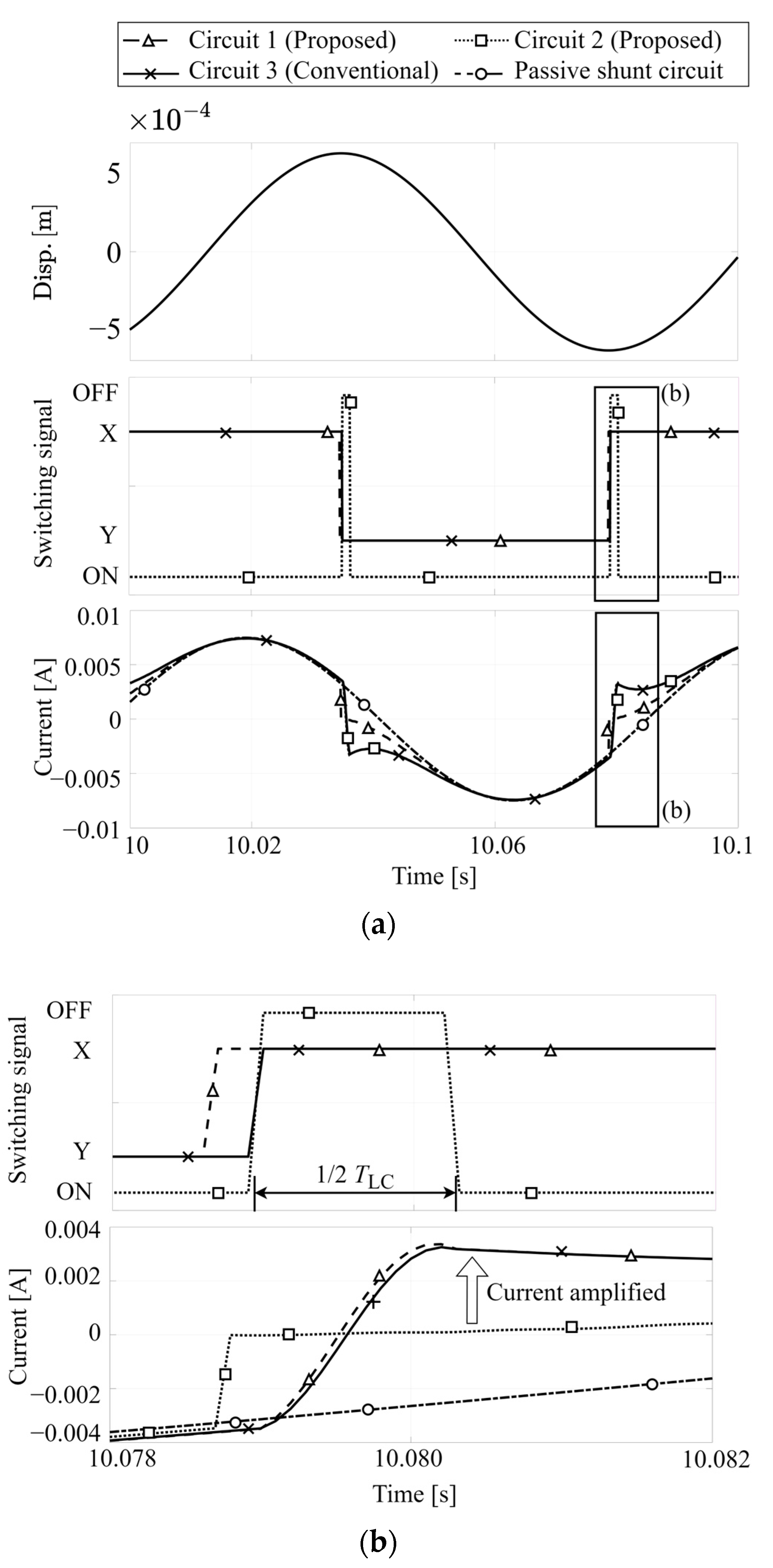
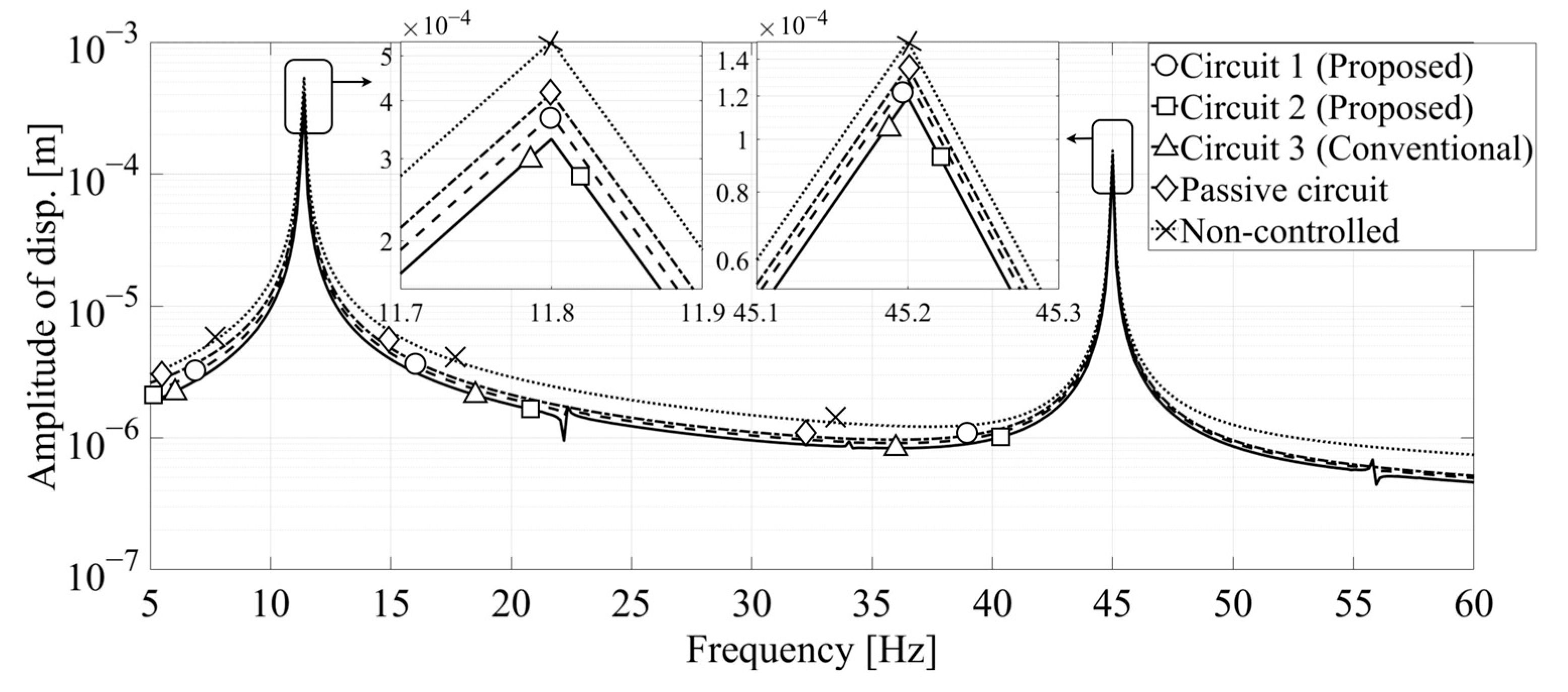
4. Numerical Simulations
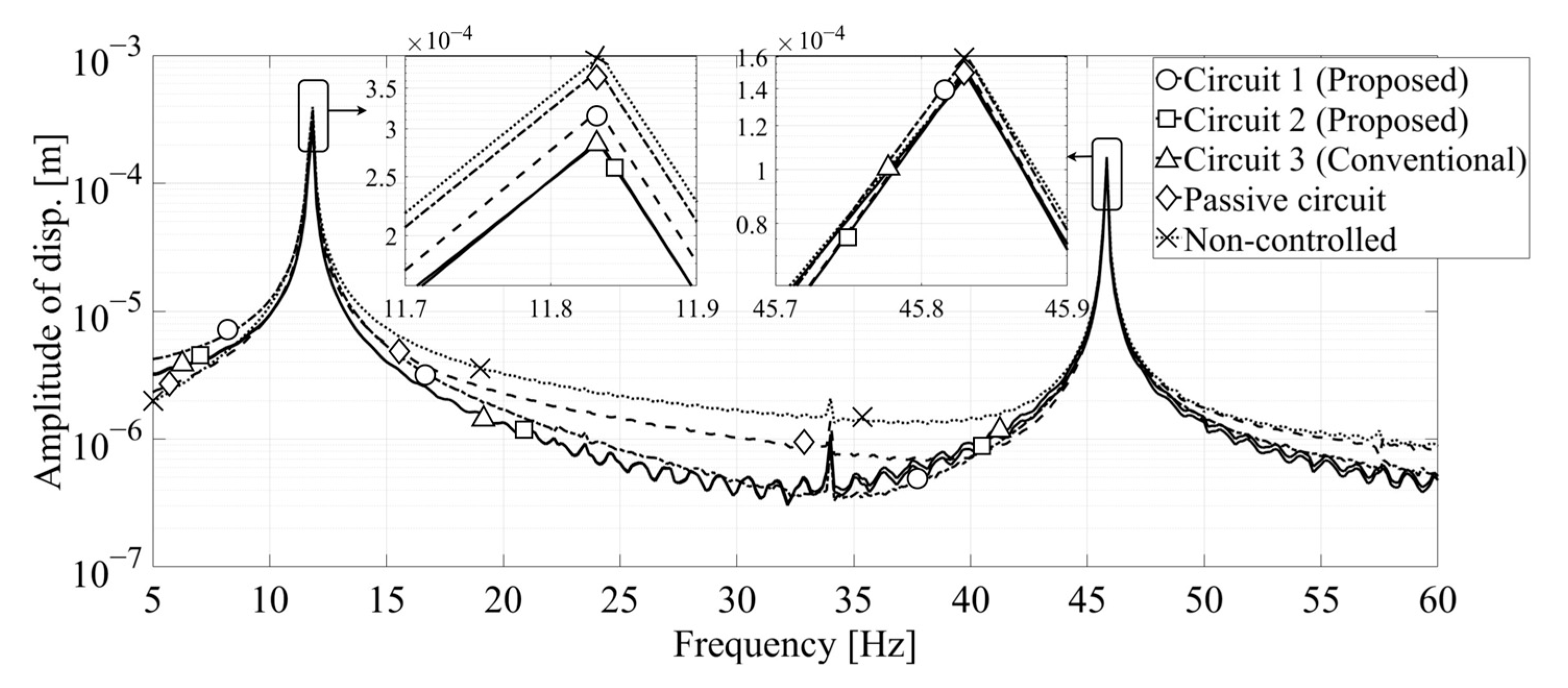
5. Experimental Validations and Results
- (1)
- The experimental and numerical simulation results were consistent.
- (2)
- The vibration control performances of the semi-active control circuits were higher than that of the passive circuit.
- (3)
- Circuits 2 and 3, which included LC oscillation, exhibited higher vibration control performance compared to Circuit 1, which does not include LC oscillation.
- (4)
- Circuits 2 and 3 were found to be more suitable for the mixture mode.
- (5)
- The vibration control rate of Circuit 2 showed a slight decrease compared to Circuit 3 due to difficulties in accurately detecting the duration of switch deactivation as pre-designed.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

Appendix B
References
- Clark, A.E. Handbook of Ferromagnetic Materials; Elsevier: Amsterdam, The Netherlands, 1980; Volume 1, pp. 531–589. [Google Scholar] [CrossRef]
- Narita, F.; Wang, Z.; Kurita, H.; Li, Z.; Shi, Y.; Jia, Y.; Soutis, C. A review of piezoelectric and magnetostrictive biosensor materials for detection of COVID-19 and other viruses. Adv. Mater. 2021, 33, 2005448. [Google Scholar] [CrossRef] [PubMed]
- Apicella, V.; Zhang, Y.W.; Li, X.; Ding, H.; Chen, L.Q. Integration of a nonlinear energy sink and a giant magnetostrictive energy harvester. J. Sound Vib. 2017, 391, 35. [Google Scholar] [CrossRef]
- Clemente, C.S.; Iannone, I.; Loschiavo, V.; Davino, D. Design and optimization of a boost interface for magnetostrictive energy harvesting. Appl. Sci. 2023, 13, 1606. [Google Scholar] [CrossRef]
- Liu, Y.; Ducharne, B.; Sebald, G.; Makihara, K.; Lallart, M. Investigation of energy harvesting capabilities of Matglas 2605SA1. Appl. Sci. 2023, 13, 3477. [Google Scholar] [CrossRef]
- Kurita, H.; Lohmuller, P.; Laheurte, P.; Nakajima, K.; Narita, F. Additive manufacturing and energy-harvesting performance of honeycomb-structured magnetostrictive Fe52–Co48 alloys. Addit. Manuf. 2022, 54, 102741. [Google Scholar] [CrossRef]
- Katabira, K.; Kurita, H.; Yoshida, Y.; Narita, F. Fabrication and characterization of carbon fiber reinforced plastics containing magnetostrictive Fe-Co fibers with damage self-detection capability. Sensors 2019, 19, 4984. [Google Scholar] [CrossRef] [PubMed]
- Moon, S.; Lim, C.; Kim, B.; Park, Y. Structural vibration control using linear magnetostrictive actuators. J. Sound Vib. 2007, 302, 875. [Google Scholar] [CrossRef]
- Mion, T.; D’Agati, M.J.; Sofronici, S.; Bussmann, K.; Staruch, M.; Kost, J.L.; Co, K.; Olsson, R.H., III; Finkel, P. High isolation, double-clamped, magnetoelectric microelectromechanical resonator magnetometer. Sensors 2023, 23, 8626. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Liu, H.; Zhao, X.; Li, A.; Yu, X. Design and characteristic analysis of magnetostrictive vibration harvester with double-stage rhombus amplification mechanism. Machines 2022, 10, 848. [Google Scholar] [CrossRef]
- Kawauchi, H.; Tanzawa, T. A fully integrated clocked AC-DC charge pump for magnetostrictive vibration energy harvesting. Electronics 2020, 9, 2194. [Google Scholar] [CrossRef]
- Li, A.; Goto, K.; Kobayashi, Y.; Hara, Y.; Jia, Y.; Shi, Y.; Soutis, C.; Kurita, H.; Narita, F.; Otsuka, K.; et al. Energy harvesting using a magnetostrictive transducer based on switching control. Sens. Actuator A Phys. 2023, 355, 114303. [Google Scholar] [CrossRef]
- Scheidler, J.J.; Asnani, V.M.; Dapino, M.J. Vibration control via stiffness switching of magnetostrictive transducers. In Proceedings of the SPIE 9799, Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring (SPIE), Las Vegas, NV, USA, 15 April 2016; Volume 979909. [Google Scholar] [CrossRef]
- Takamoto, I.; Abe, M.; Hara, Y.; Otsuka, K. Makihara, Comprehensive predictive control for vibration suppression based on piecewise constant input formulation. J. Intell. Mater. Syst. Struct. 2021, 33, 901–917. [Google Scholar] [CrossRef]
- Abe, M.; Hara, Y.; Otsuka, K.; Makihara, K. Semi-Active switching vibration control with tree-based prediction and optimization strategy. J. Intell. Mater. Syst. Struct. 2023, 34, 440–460. [Google Scholar] [CrossRef]
- Li, A.; Kobayashi, Y.; Hara, Y.; Otsuka, K.; Makihara, K. Magnetostrictive-based induced current inversion and amplification: Semi-active vibration suppression for multiple-degree-of-freedom flexible structures. J. Sound Vib. 2024, 568, 118068. [Google Scholar] [CrossRef]
- Fujita, Y.; Makihara, K. Magnetostrictive vibration energy harvester with control circuit. In Proceedings of the 13th International Conference on Flow Dynamics, Sendai, Japan, 10–12 October 2016. [Google Scholar]
- Fujita, Y.; Makihara, K. Magnetostrictive vibration energy harvesting with controlling circuit. In Proceedings of the Dynamics and Design Conference 2016, Yamaguchi, Japan, 23–26 August 2016; 539. [Google Scholar] [CrossRef]
- Miyazawa, H.; Sogo, N.; Makihara, K. Semi-active control of truss structure with magnetostrictive transducer. In Proceedings of the 14th International Conference on Flow Dynamics, Sendai, Japan, 1–3 November 2017. [Google Scholar]
- Scheidler, J.J.; Asnani, V.M.; Dapino, M.J. Dynamic Characterization of Galfenol (Fe81.6Ga18.4); National Aeronautics and Space Administration STI Program; Tech. Rep. NASA/TP-2016-218754; NASA: Hampton, VA, USA, 2016. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value [Unit] |
|---|---|
| Ordinary rod member length lo | 0.38 [m] |
| Diagonal rod member length ld | 0.54 [m] |
| Stiffness of ordinary rod member kt_o | 5.22 × 106 [N m−1] |
| Stiffness of diagonal rod member kt_d | 3.71 × 106 [N m−1] |
| Ordinary rod member mass mo | 3.61 × 10–2 [kg] |
| Diagonal rod member mass md | 4.62 × 10–2 [kg] |
| Node mass mn | 6.77 × 10–2 [kg] |
| 5.50 × 106 [N m−1] | |
| Magnetostriction coefficient bm | 1.67 × 102 [N A−1] |
| 0.17 [H] | |
| Inversion capacitance Ci | 1.00 × 10–6 [F] |
| Internal resistance R0 | 21.50 [Ω] |
| Timestep Δt | 1.00 × 10–5 [s] |
| Circuit | Switching Strategy |
|---|---|
| 1 (Proposed, Figure 4a) | , point X should be selected; , point Y should be selected. |
| 2 (Proposed, Figure 5a) | , the switch should turn ON; . |
| 3 (Conventional, Figure 6a) | , point X should be selected; , point Y should be selected. |
| Circuit | (1st Mode) | (2nd Mode) | (Mixture Mode) |
|---|---|---|---|
| Non-controlled | 1.18 × 10−4 | 3.12 × 10−5 | 1.25 × 10−4 |
| Passive circuit | 9.31 × 10−5 | 2.82 × 10−5 | 9.96 × 10−5 |
| 1 (Proposed, Figure 4a) | 9.18 × 10−5 | 2.54 × 10−5 | 9.03 × 10−5 |
| 2 (Proposed, Figure 5a) | 9.03 × 10−5 | 2.17 × 10−5 | 8.08 × 10−5 |
| 3 (Conventional, Figure 6a) | 9.03 × 10−5 | 2.17 × 10−5 | 8.08 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, A.; Kobayashi, Y.; Hara, Y.; Otsuka, K.; Makihara, K. Comparison of Magnetostrictive-Actuated Semi-Active Control Methods Based on Synchronized Switching. Actuators 2024, 13, 143. https://doi.org/10.3390/act13040143
Li A, Kobayashi Y, Hara Y, Otsuka K, Makihara K. Comparison of Magnetostrictive-Actuated Semi-Active Control Methods Based on Synchronized Switching. Actuators. 2024; 13(4):143. https://doi.org/10.3390/act13040143
Chicago/Turabian StyleLi, An, Yuusuke Kobayashi, Yushin Hara, Keisuke Otsuka, and Kanjuro Makihara. 2024. "Comparison of Magnetostrictive-Actuated Semi-Active Control Methods Based on Synchronized Switching" Actuators 13, no. 4: 143. https://doi.org/10.3390/act13040143
APA StyleLi, A., Kobayashi, Y., Hara, Y., Otsuka, K., & Makihara, K. (2024). Comparison of Magnetostrictive-Actuated Semi-Active Control Methods Based on Synchronized Switching. Actuators, 13(4), 143. https://doi.org/10.3390/act13040143