
Non-Electrically Driven Acoustic Actuator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design of Cylindrical Vessel Actuator
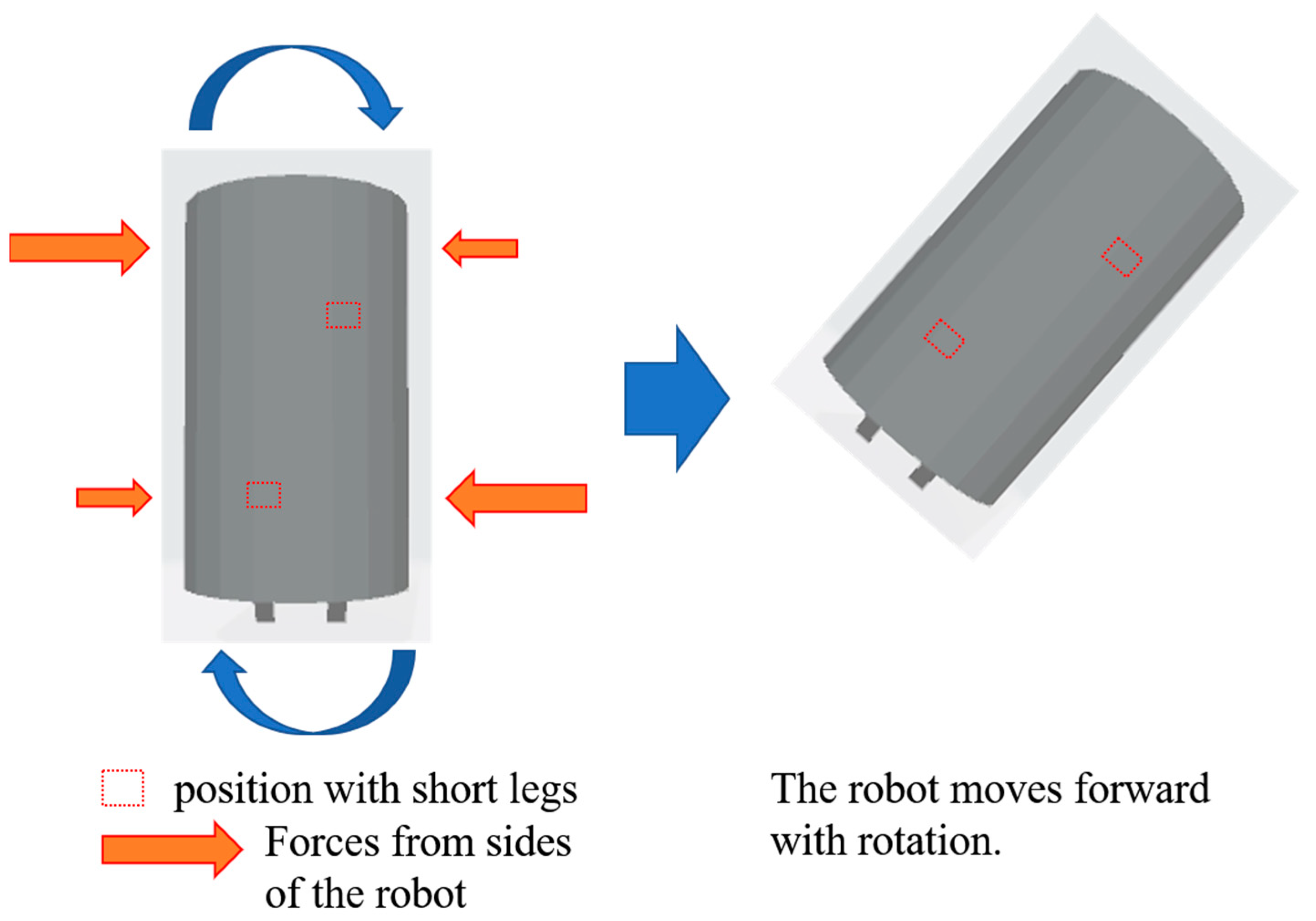
2.1. Outline of Cylindrical Actuator
2.2. Cylindrical Actuator Design
3. Experiments with Cylindrical Vessel Actuator
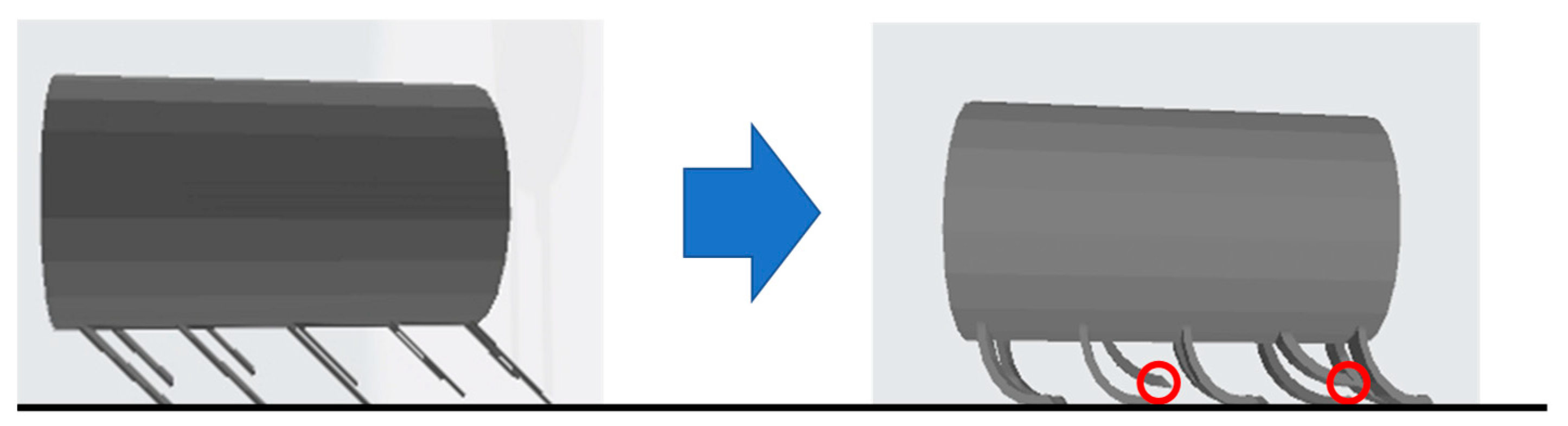
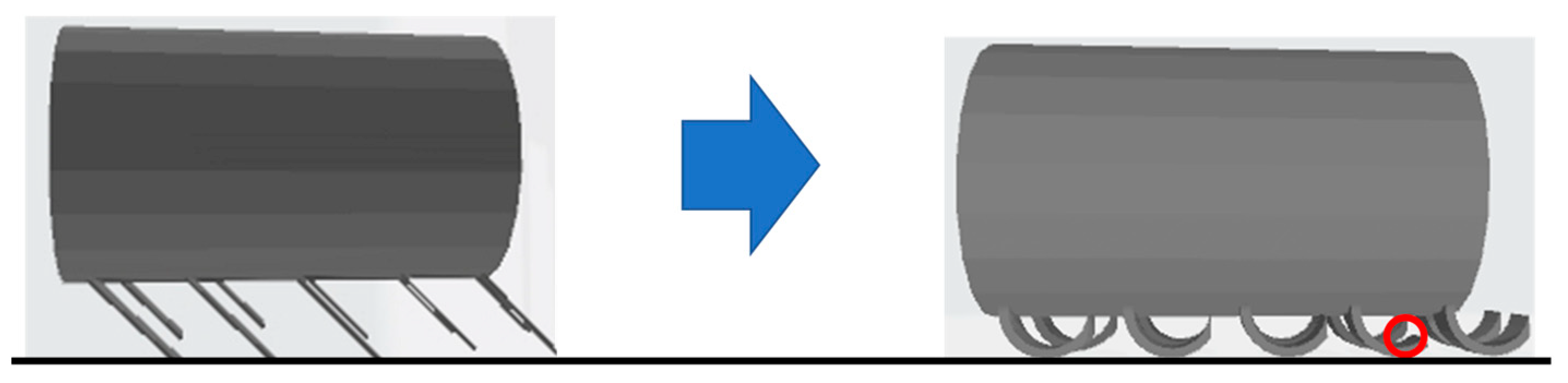
3.1. Comparison Experiment Regarding Actuator Leg Length
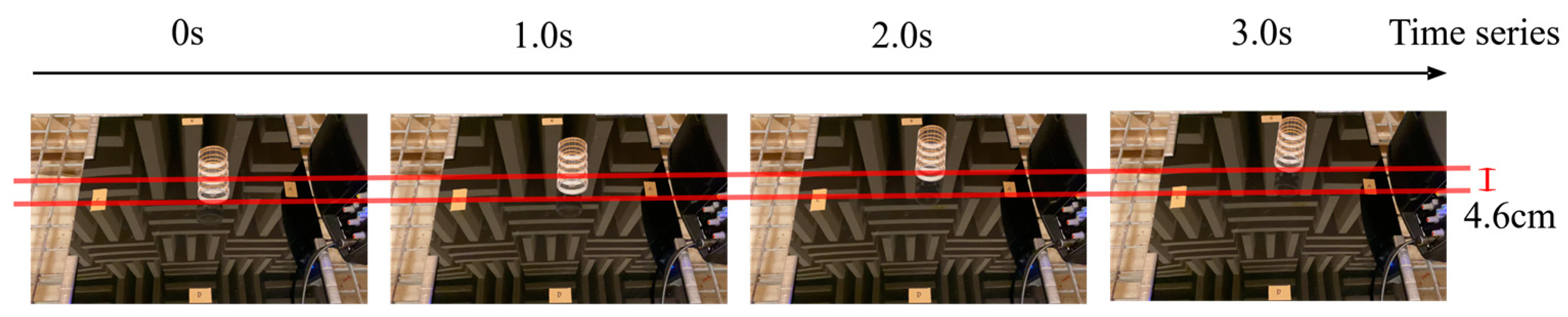
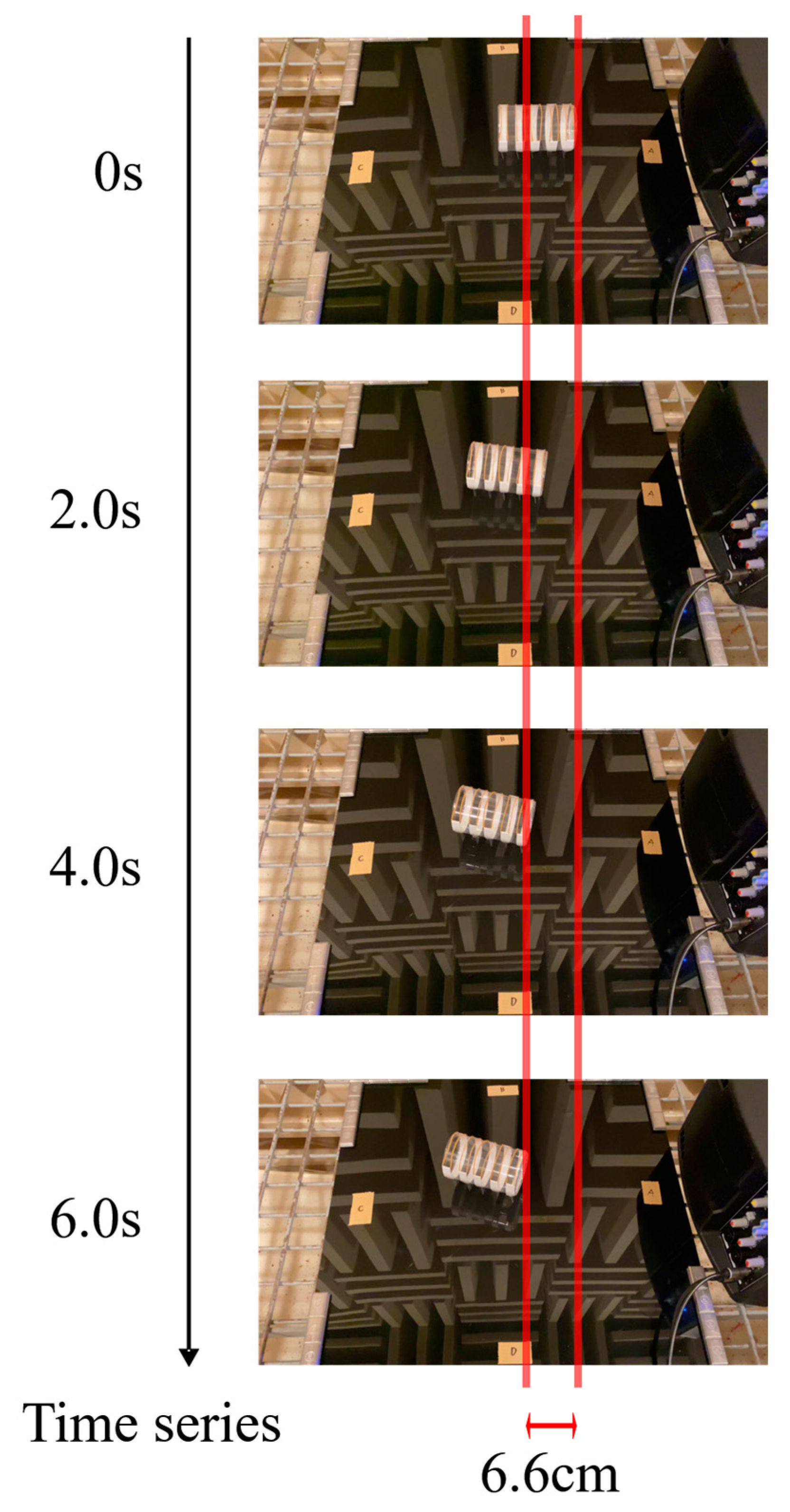
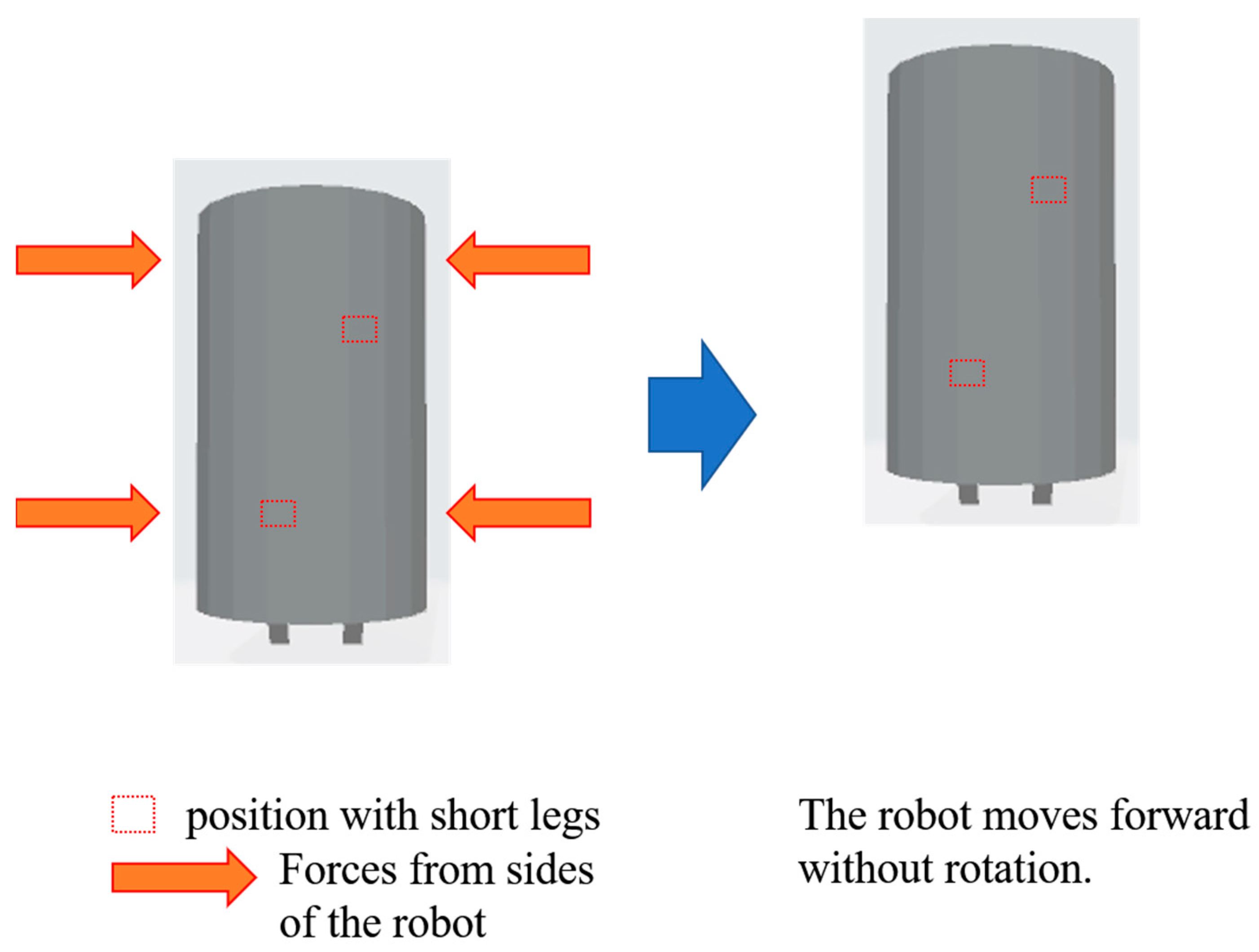
3.2. Cylindrical Actuator Movement Experiment
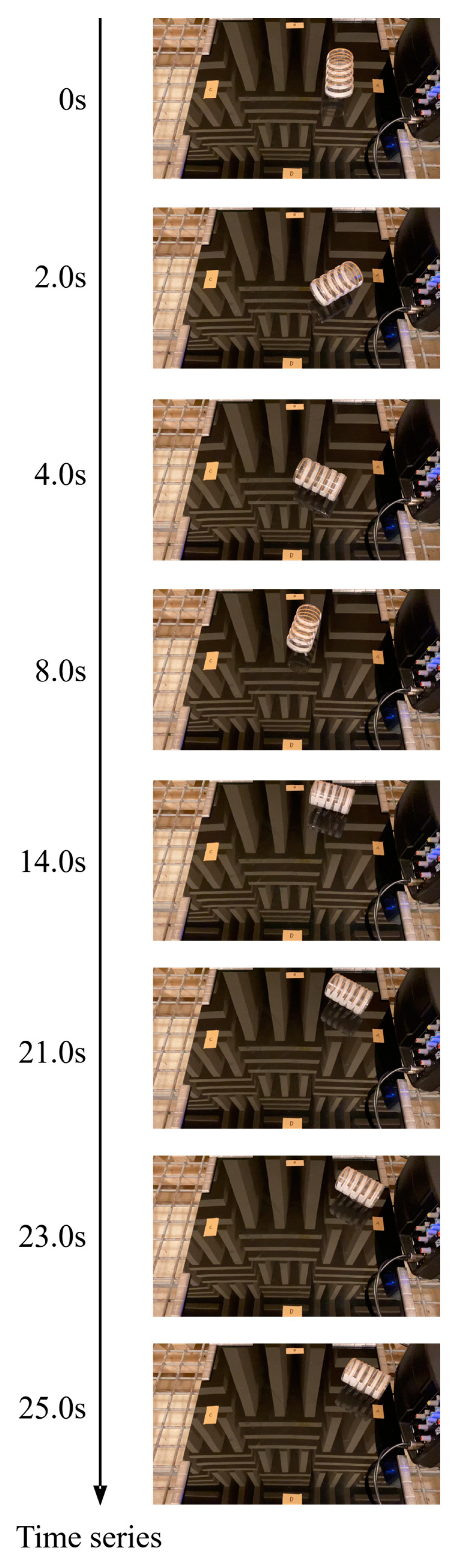
3.3. Movement Experimental Results
3.4. Summary and Discussion of Cylindrical Actuator
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gregory, J. Application of Multi-Robot Systems to Disaster-Relief Scenarios with Limited Communication. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 113, pp. 639–653. [Google Scholar]
- Kamegawa, T.; Akiyama, T.; Sakai, S.; Fujii, K.; Une, K.; Ou, E.; Matsumura, Y.; Kishutani, T.; Nose, E.; Yoshizaki, Y.; et al. Development of a separable search-and-rescue robot composed of a mobile robot and a snake robot. Adv. Robot. 2020, 34, 132–139. [Google Scholar] [CrossRef]
- Deng, W.; Huang, K.; Chen, X.; Zhou, Z.; Shi, C.; Guo, R.; Zhang, H. Semantic RGB-D SLAM for Rescue Robot Navigation. IEEE Access 2020, 8, 221320–221329. [Google Scholar] [CrossRef]
- Ingale, K.; Deshmukh, A.; Deshpande, A.; Deshmukh, S.; Deshmukh, M.; Bhise, S. Multi-Agent Swarm Robotics for Accurate Position Detection in Disaster Scenarios. In Proceedings of the 2023 International Conference on Inventive Computation Technologies (ICICT), Lalitpur, Nepal, 26–28 April 2023; pp. 1454–1460. [Google Scholar]
- Shibata, T.; Sasaya, T.; Kawahara, N. Development of In-Pipe Microrobot Using Microwave Energy Transmission. J. Inst. Electron. Inf. Commun. Eng. B 2000, J83-B, 704–710. [Google Scholar] [CrossRef]
- Kawauchi, N.; Shiotani, S.; Kanazawa, H.; Sasaki, T.; Tsuji, H. A plant maintenance humanoid robot system. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 2973–2978. [Google Scholar]
- Takakura, K. Protecting robot workers from radiation. Impact 2020, 10, 52–53. [Google Scholar] [CrossRef]
- ANNnewsCH. [Nuclear Power] Domestic Robot Left Behind in Reactor Building (11/10/21). Available online: https://www.youtube.com/watch?v=9AV4i6-2Q4s (accessed on 14 March 2022).
- Huruta, T.; Yoshida, T.; Nishimura, T.; Yamato, H. Development of the Exploring Robot toward Future Indoor Surveillance Missions in the Fukushima Daiichi Nuclear Power Plant. J. Robot. Soc. Jpn. 2014, 32, 92–97. [Google Scholar]
- Onishi, K.; Onishi, N.; Fujita, J.; Hara, K.; Hashimoto, T. Design and Development of Robots which Support Activities of Recovery from Nuclear Hazards. J. Robot. Soc. Jpn. 2014, 32, 816–824. [Google Scholar] [CrossRef]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanag, E.; Fukushima, M.; et al. Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- Tsiligiannis, G.; Touboul, A.; Bricas, G.; Maraine, T.; Boch, J.; Wrobel, F.; Michez, A.; Saigne, F.; Godot, A.; Etile, A.; et al. Evaluation and Analysis of Technologies for Robotic Platforms for the Nuclear Decommissioning. In Proceedings of the 15th International Conference on Design and Technology of Integrated Systems in Nanoscale Era, Marrakech, Morocco, 1–3 April 2020. [Google Scholar]
- Han, Z.; Duan, X.; Wang, Y.; Pan, Y.; Wu, Y. Robot System and Fastening Force Control for Sealing Blocking Plates of Steam Generator. In Proceedings of the 9th IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems, Suzhou China, 29 July–2 August 2019. [Google Scholar]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Hada, Y. Redesign of rescue mobile robot Quince. In Proceedings of the 2011 IEEE International Symposium on Safety, Security and Rescue Robotics, Kyoto Japan, 1–5 November 2011. [Google Scholar]
- Dong, P.; Wang, X.; Xing, H.; Liu, Y.; Zhang, M. Design and control of a tracked robot for search and rescue in nuclear power plant. In Proceedings of the 2016 International Conference on Advanced Robotics and Mechatronics, Macau, China, 18–20 August 2016. [Google Scholar]
- Zolfagharian, A.; Durran, L.; Gharaie, S.; Rolfe, B.; Kaynak, A.; Bodaghi, M. 4D printing soft robots guided by machine learning and finite element models. Sens. Actuators A Phys. 2021, 328, 112774. [Google Scholar] [CrossRef]
- Sachin; Wang, Z.; Hirai, S. Analytical Modeling of a Soft Pneu-Net Actuator Subjected to Planar Tip Contact. IEEE Trans. Robot. 2022, 38, 2720–2733. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Parvez Mahmud, M.A.; Gharaie, S.; Bodaghi, M.; Kouzani, A.Z.; Kaynak, A. 3D/4D-printed bending-type soft pneumatic actuators: Fabrication, modelling, and control. Virtual Phys. Prototyp. 2020, 15, 373–402. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2, 101. [Google Scholar] [CrossRef] [PubMed]
- Nishikawa, Y.; Matsumoto, M. Lightweight indestructible soft robot. IEEE Trans. Electr. Electron. Eng. 2018, 13, 652–653. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Syst. 2000, 20, 15–38. [Google Scholar] [CrossRef]
- Tondu, B. Modelling of the McKibben artificial muscle: A review. J. Intell. Mater. Syst. Struct. 2012, 23, 225–253. [Google Scholar] [CrossRef]
- Norioka, K.; Hosoda, K. Motor Development of an Pneumatic Musculoskeletal Infant Robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 963–968. [Google Scholar] [CrossRef]
- Niiyama, R.; Nagakubo, A.; Kuniyoshi, Y.; Mowgli, A. Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal System. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Rome, Italy, 10–14 April 2007; pp. 2546–2551. [Google Scholar] [CrossRef]
- Niiyama, R.; Nishikawa, S.; Kuniyoshi, Y. Athlete Robot with Applied Human Muscle Activation Patterns for Bipedal Running. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 498–503. [Google Scholar] [CrossRef]
- Rosendo, A.; Nakatsu, S.; Narioka, K.; Hosoda, K. Pneupard: A biomimetic musculoskeletal approach for a feline-inspired quadruped robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1452–1457. [Google Scholar] [CrossRef]
- Boxerbaum, A.; Chiel, H.J.; Quinn, R.D. A New Theory and Methods for Creating Peristaltic Motion in a Robotic Platform. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1221–1227. [Google Scholar] [CrossRef]
- Steltz, E.; Mozeika, A.; Rodenberg, N.; Brown, E.; Jaeger, H.M. JSEL: Jamming Skin Enabled Locomotion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5672–5677. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Daniel, M.V.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Nakano, M.; Ikeda, T. Photomechanics: Directed bending of a polymer film by light. Nature 2003, 425, 145. [Google Scholar] [CrossRef] [PubMed]
- Matsumoto, M. Water driven soft actuator. Appl. Syst. Innov. 2018, 1, 41. [Google Scholar] [CrossRef]
- Osada, Y.; Okazaki, H.; Hori, H. A polymer gel with electrically driven mobility. Nature 1992, 355, 242–244. [Google Scholar] [CrossRef]
- Brannon-Peppas, L.; Peppas, N.A. Dynamic and equilibrium swelling behaviour of pH-sensitive hydrogels containing 2-hydroxyethyl methacrylate. Biomaterials. 1990, 11, 635–644. [Google Scholar] [CrossRef]
- Fundueanu, G.; Constantin, M.; Bucatariu, S.; Ascenzi, P. pH/thermo-responsive poly(N-isopropylacrylamide-co-maleic acid) hydrogel with a sensor and an actuator for biomedical applications. Polymer 2017, 110, 177–186. [Google Scholar] [CrossRef]
- Gomte, S.S.; Agnihotri, T.G.; Khopade, S.; Jain, A. Exploring the potential of pH-sensitive polymers in targeted drug delivery. J. Biomater. Sci. Polym. Ed. 2024, 35, 228–268. [Google Scholar] [CrossRef] [PubMed]
- Yamagiwa, K.; Katoh, M.; Yoshida, M.; Ohkawa, A.; Ichijo, H. Temperature-Swing Column Adsorption of Nonionic Surfactant with Poly(vinylmethylether). Gel 2001, 34, 1317–1320. [Google Scholar] [CrossRef]
- Kim, Y.S.; Liu, M.; Ishida, Y.; Ebina, Y.; Osada, M.; Sasaki, T.; Hikima, T.; Takata, M.; Aida, T. Thermoresponsive actuation enabled by permittivity switching in an electrostatically anisotropic hydrogel. Nat. Mater. 2015, 14, 1002–1007. [Google Scholar] [CrossRef] [PubMed]
- Otake, S.; Matsumoto, M. Investigation of driving principle of non-electrically driven robots using sound waves as a power source. In Proceedings of the 2021 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 8–11 August 2021; pp. 1261–1267. [Google Scholar]
- Niwano, T.; Matsumoto, M. Sound Driven Actuator Using Helmholtz Resonance. Actuators 2022, 11, 163. [Google Scholar] [CrossRef]
- Honkyu, Y. The movement of paper cups by sound. Phys. Educ. 2011, 59, 20–21. [Google Scholar]
- Available online: https://www.hexbug.com/nano.html (accessed on 5 April 2024).
- Baconnier, P.; Shohat, D.; Hernandèz, C.; Coulais, C.; Démery, V.; Düring, G.; Dauchot, O. Selective and collective actuation in active solids. Nat. Phys. 2022, 18, 1234–1239. [Google Scholar] [CrossRef]
- Rossing, T.D.; Fletcher, N.H. Principles of Vibration and Sound; Springer: New York, NY, USA, 1995. [Google Scholar]
- Yamagishi, G. Analysis of Vibration Characteristics of Rectangular Plates by Holography under Various Support Conditions. Trans. Archit. Inst. Jpn. 1985, 357. [Google Scholar] [CrossRef]
- Leissa, A.W. Vibration of Plates. In NASA Technical Reports Server; SP-160; NASA: Washington, DC, USA, 1969. [Google Scholar]
- Leissa, A.W. The Free Vibration of Rectangular Plates. Sound Vib. 1973, 31, 257–293. [Google Scholar] [CrossRef]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niwano, T.; Matsumoto, M. Non-Electrically Driven Acoustic Actuator. Actuators 2024, 13, 148. https://doi.org/10.3390/act13040148
Niwano T, Matsumoto M. Non-Electrically Driven Acoustic Actuator. Actuators. 2024; 13(4):148. https://doi.org/10.3390/act13040148
Chicago/Turabian StyleNiwano, Takeru, and Mitsuharu Matsumoto. 2024. "Non-Electrically Driven Acoustic Actuator" Actuators 13, no. 4: 148. https://doi.org/10.3390/act13040148
APA StyleNiwano, T., & Matsumoto, M. (2024). Non-Electrically Driven Acoustic Actuator. Actuators, 13(4), 148. https://doi.org/10.3390/act13040148