
Quadcopter Trajectory Tracking Control Based on Flatness Model Predictive Control and Neural Network

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
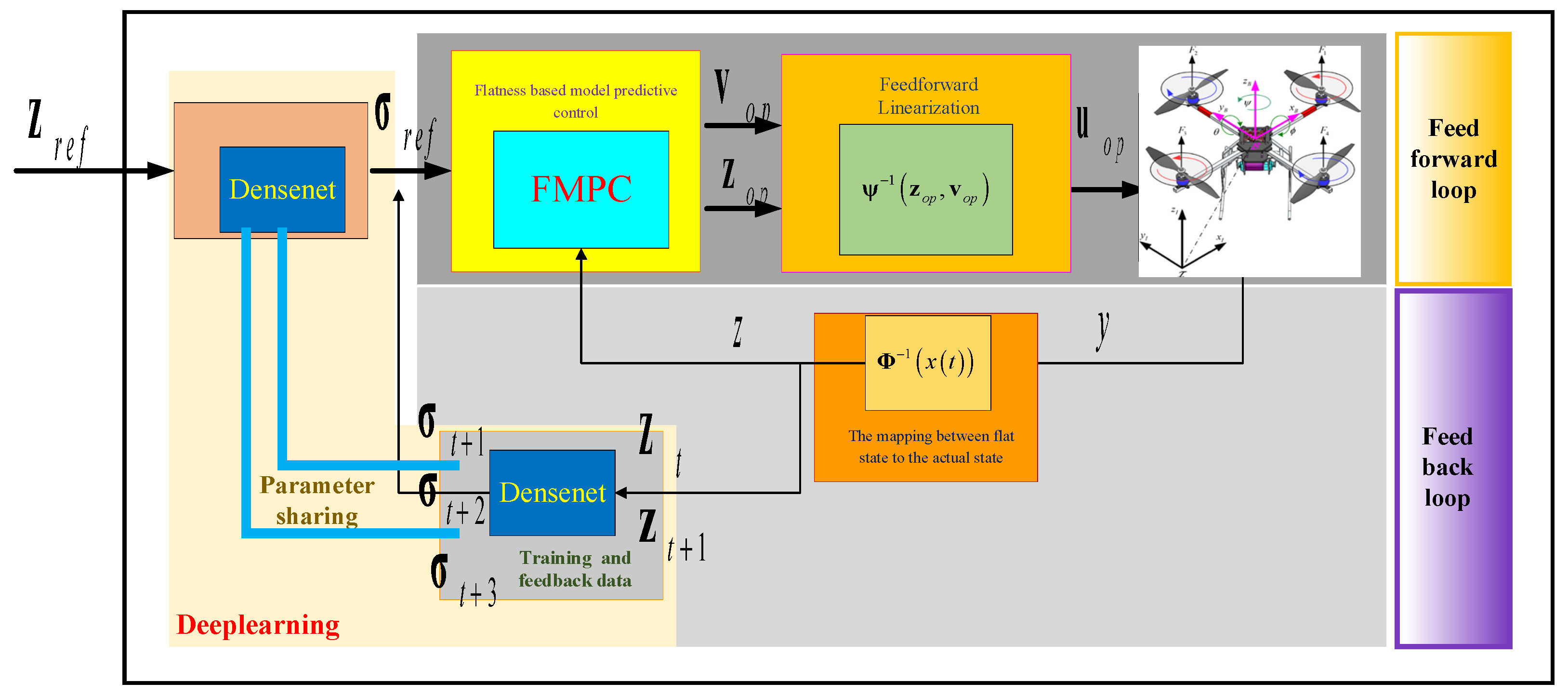
- This study proposes a novel control architecture in which FMPC couples feedback from model predictive control with feedforward linearization to provide a more reliable trajectory-tracking performance.
- (2)
- To further improve the performance of the above control architecture, a DenseNet was trained to learn the inverse dynamics of the system, which was used to adjust the desired path input to FMPC.
- (3)
- DenseNet and the feedforward linearization combined with feedback model predictive control both form a larger feedback system to improve the control robustness and trajectory-tracking performance of the quadcopter.
2. System Description
3. Background Knowledge
4. Methodology
4.1. Differential Flatness Formulation
4.2. Flatness-Based Model Predictive Control
4.3. Improvement via Learning
- Assumptions: The DenseNet does not include modeling of the z and yaw directions to simplify the model. Only the x and y axes are taken into account.
- Inputs: The DenseNet receives the current flat state and the future flat state as inputs. Observing the x and y values relative to the position of is essential. This feature renders the neural network insensitive to the position of the input.
- Outputs: The DenseNet produces flat outputs that specify the desired trajectory input for the MPC controller. The value of N is either equal to or less than the prediction horizon of the MPC. Once again, all of the output values for x and y are relative to . So, to obtain the actual coordinates, the values are added back.
- Concept: Based on the current state and the desired future state , the DenseNet generates the optimal sequence of flat outputs to reach the desired future state . Consequently, the DenseNet learns inverse dynamics, and it refers to the inverse mapping from the input to the output. The input consists of the desired trajectory of MPC along with the current state , and the output is the future state .
- Training: The network is trained using a reference trajectory, , as shown in Figure 1. The resulting flat states, , are recorded. The flat states will serve as the inputs during the training phase, whereas will serve as the training labels. So, the neural network undergoes training using a supervised learning fashion.
- Inference: For an entire trajectory in a flat space , each pair of consecutive states in this trajectory feeds into the DenseNet. The DenseNet then produces N flat outputs , which are then recorded. At each time step t, the collected values are averaged and stored to create the reference trajectory .
5. Experiment Results
5.1. Experiment Introduction
5.2. Training the DenseNet
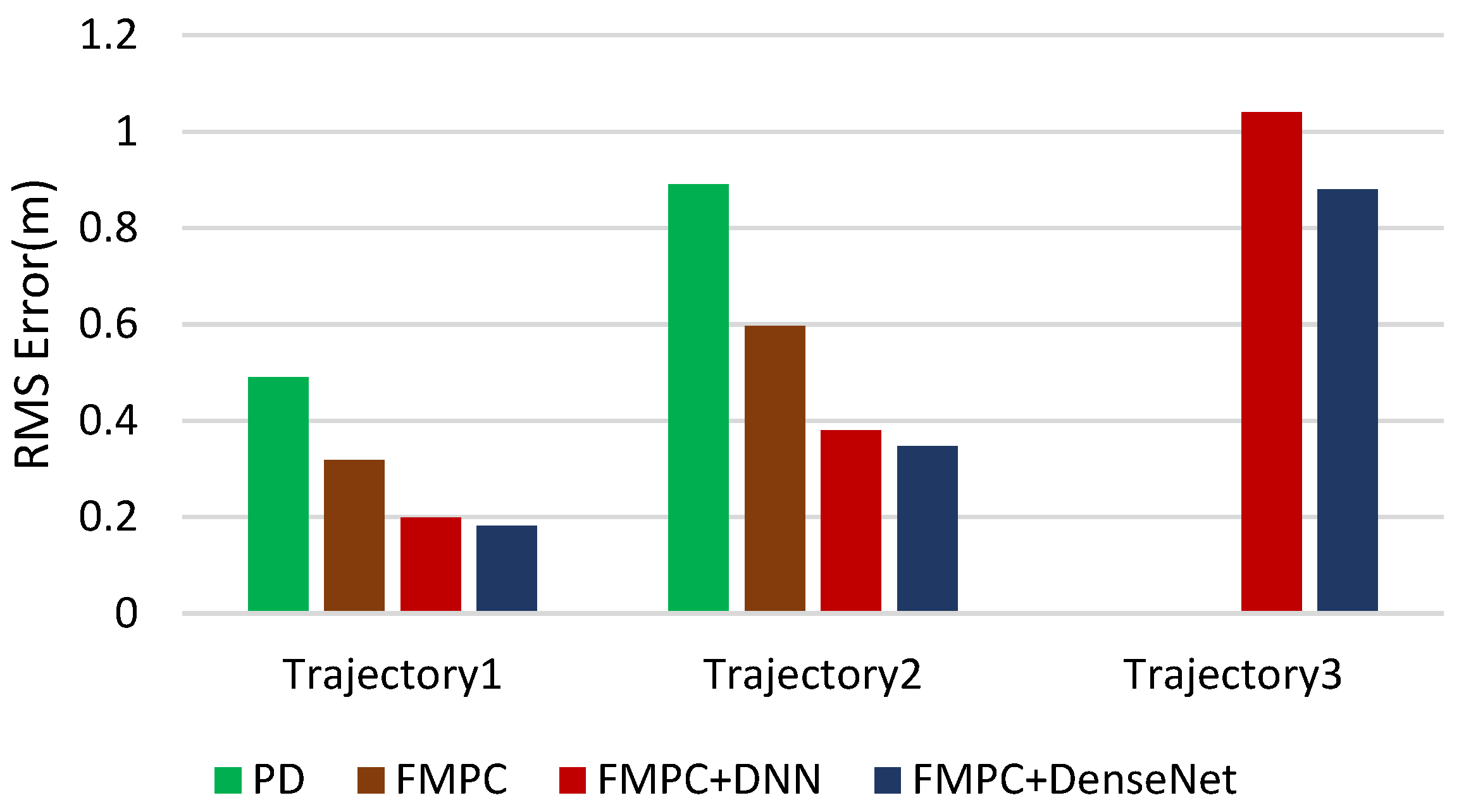
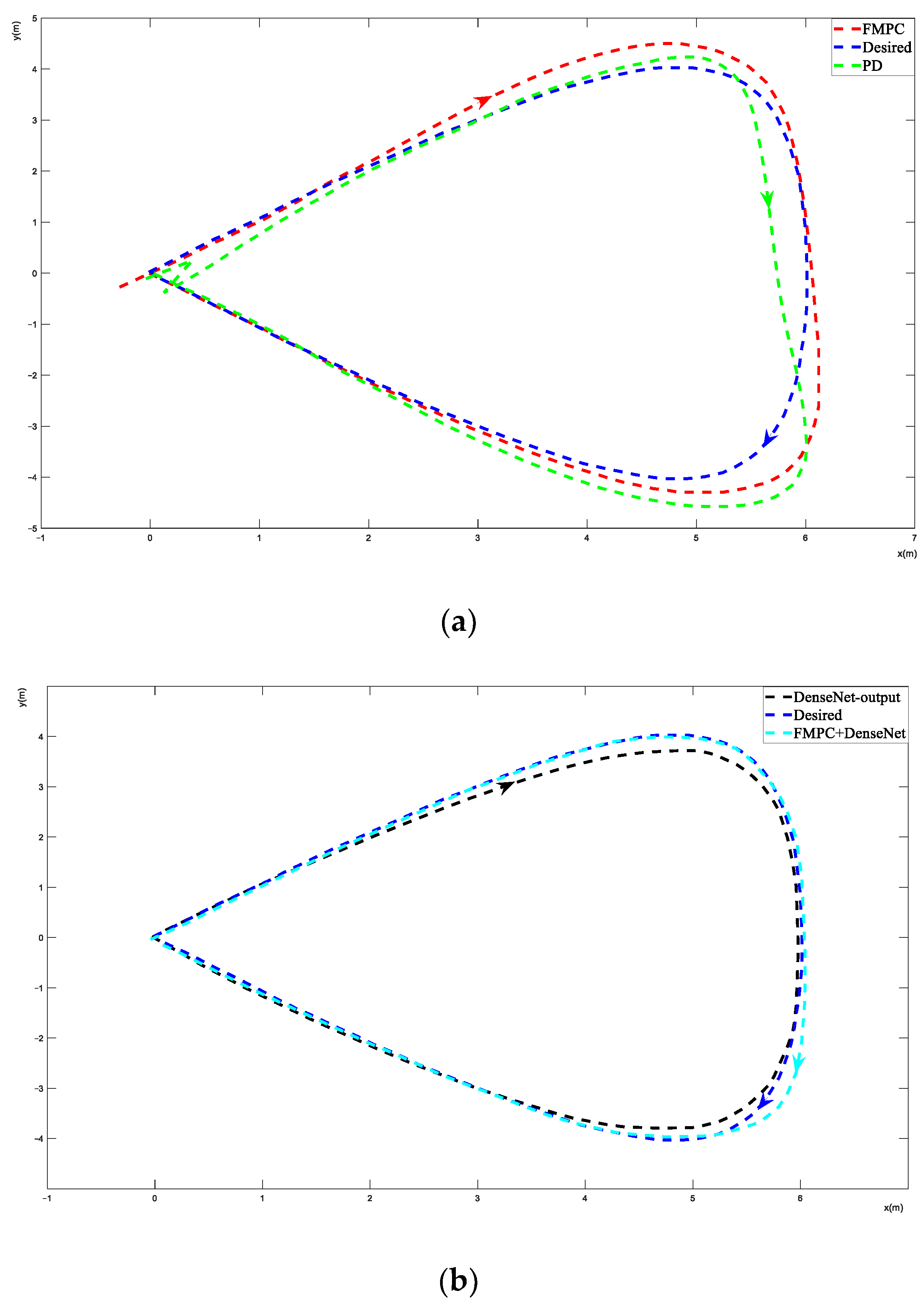
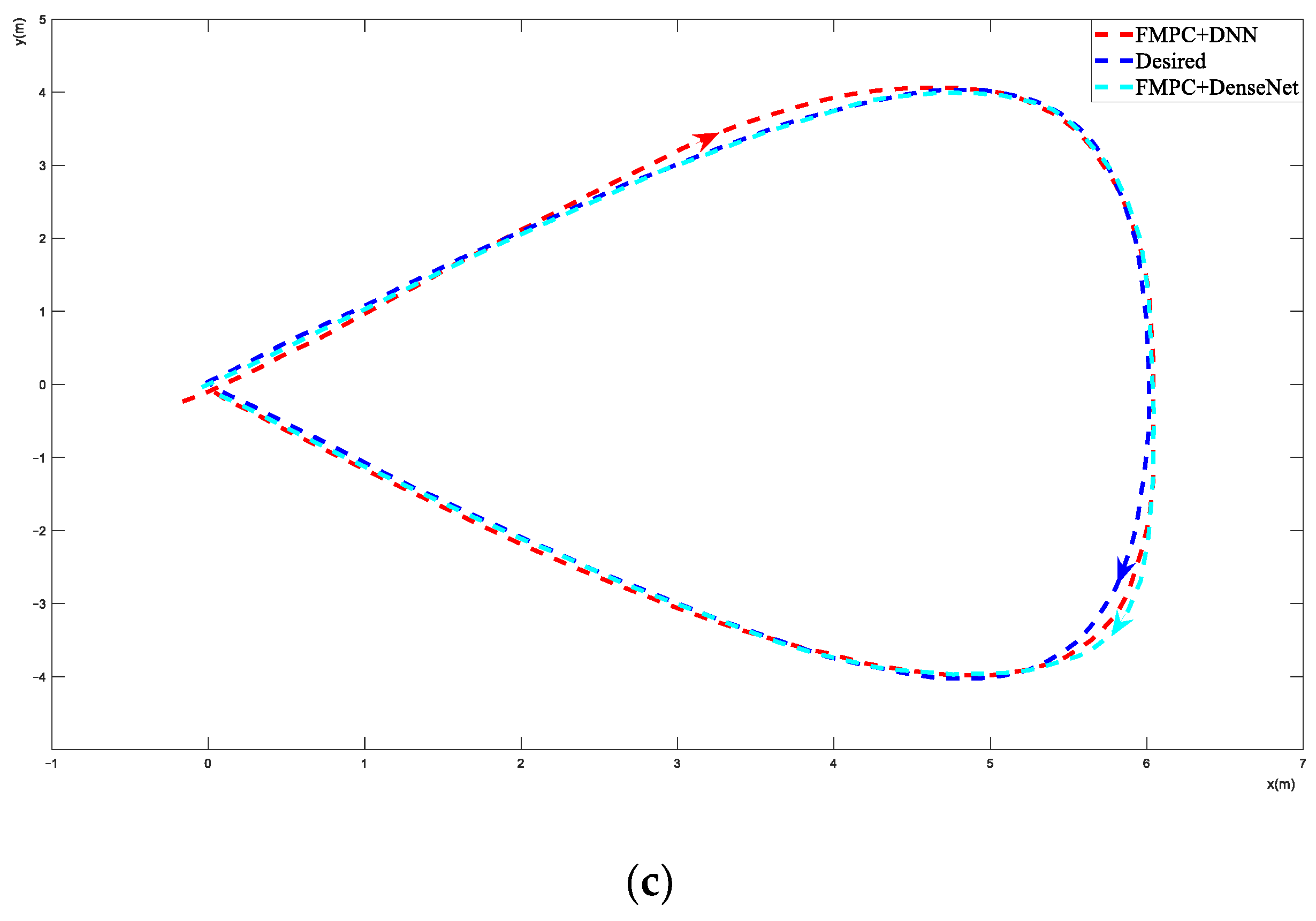
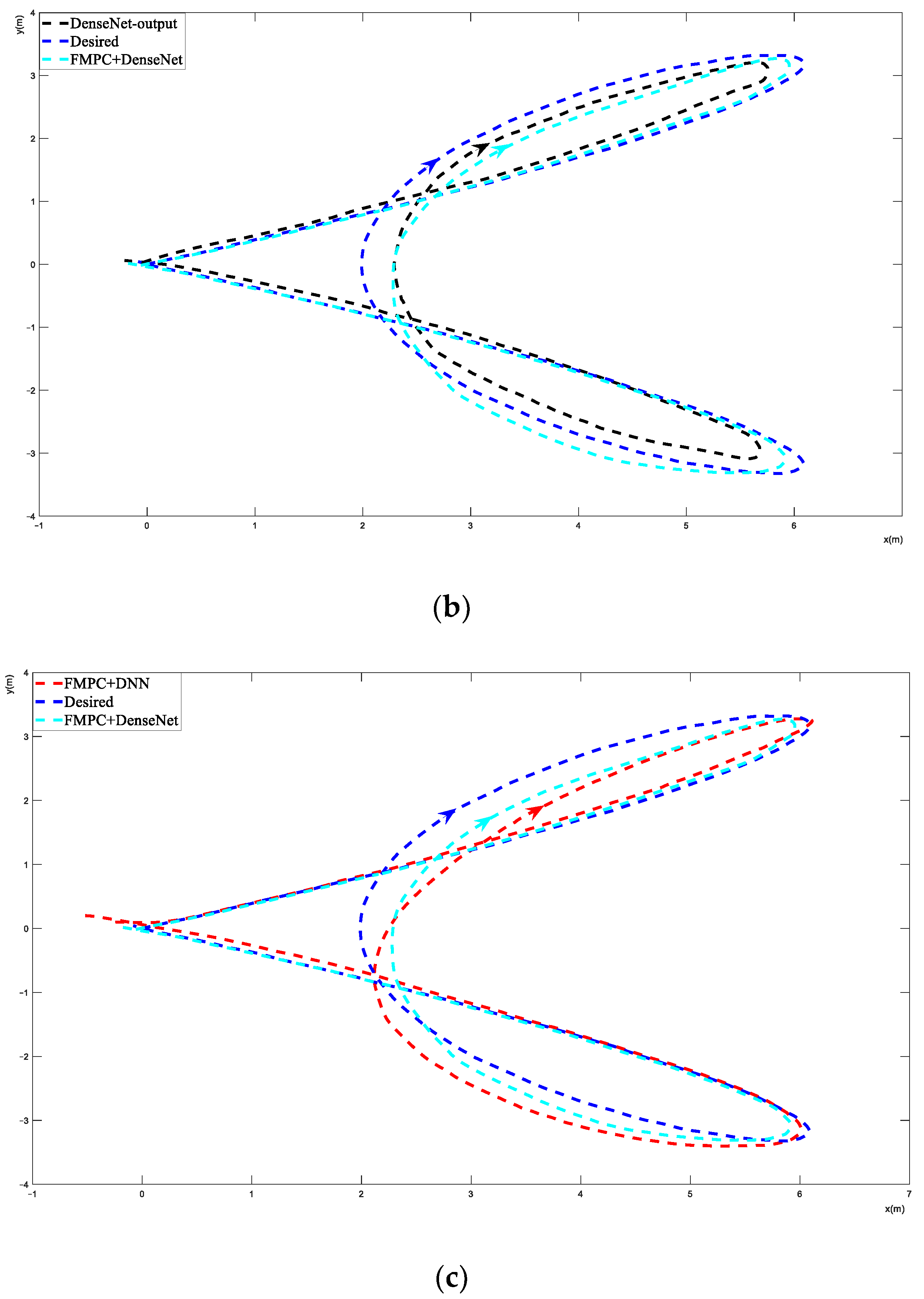
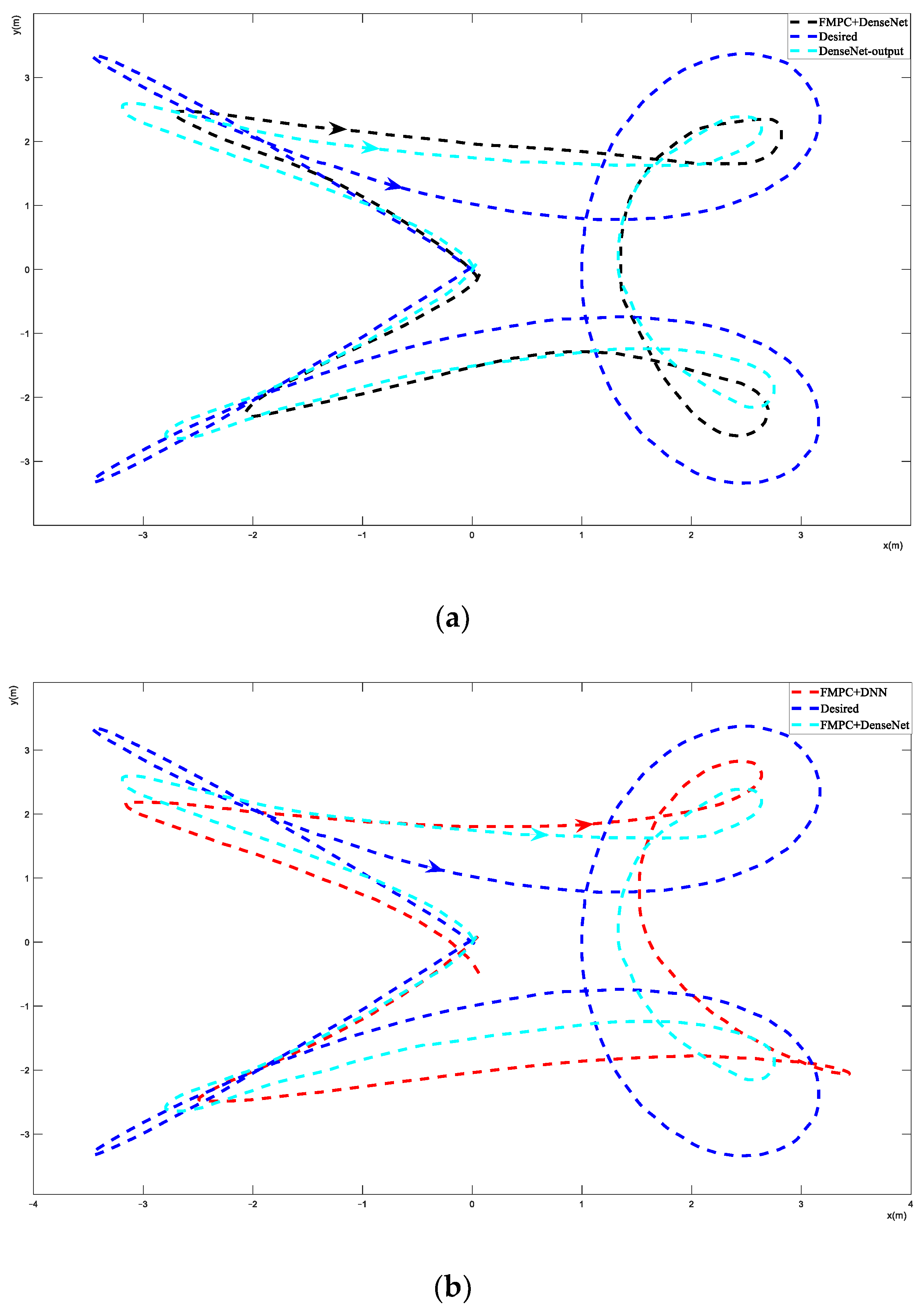
5.3. Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bristeau, P.; Callou, F.; Vissiere, D.; Petit, N. The navigation and control technology inside the ar. drone micro uav. IFAC Proc. 2011, 44, 1477–1484. [Google Scholar]
- Bircher, A.; Kamel, M.; Alexis, K.; Oleynikova, H.; Siegwart, R. Receding horizon path planning for 3D exploration and surface inspection. Auton. Robot. 2016, 42, 291–306. [Google Scholar] [CrossRef]
- Rudol, P.; Doherty, P. Human body detection and geo localization for UAV search and rescue missions using color and thermal imagery. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–8. [Google Scholar]
- Han, J.; Chen, Y. Multiple UAV Formations for Cooperative Source Seeking and Contour Mapping of a Radiative Signal Field. J. Intell. Robot. Syst. 2013, 74, 323–332. [Google Scholar] [CrossRef]
- Bangura, M.; Mahony, R. Real-Time Model Predictive Control for Quadrotors. IFAC Proc. Vol. 2014, 47, 11773–11780. [Google Scholar] [CrossRef]
- Wang, Y.; Boyd, S. Fast Model Predictive Control Using Online Optimization. IEEE Trans. Control. Syst. Technol. 2010, 18, 267–278. [Google Scholar] [CrossRef]
- Houska, B.; Ferreau, H.; Diehl, M. ACADO toolkit—An open source framework for automatic control and dynamic optimization. Optim. Control Appl. Methods 2011, 32, 298–312. [Google Scholar] [CrossRef]
- Greeff, M.; Schoellig, A.P. Flatness-Based Model Predictive Control for Quadrotor Trajectory Tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6740–6745. [Google Scholar]
- Zhou, S.; Helwa, M.K.; Schoellig, A.P. Design of Deep Neural Networks as Add-on Blocks for Improving Impromptu Trajectory Tracking. In Proceedings of the IEEE Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 5201–5207. [Google Scholar]
- Primbs, J.A.; Nevistic, V. MPC extensions to feedback linearizable systems. In Proceedings of the American Control Conference (ACC), Albuquerque, NM, USA, 1–6 June 1997; pp. 2073–2077. [Google Scholar]
- Khotare, M.V.; Nevistic, V.; Morari, M. Robust constrained model predictive control for nonlinear systems: A comparative study. In Proceedings of the IEEE Conference on Decision and Control (CDC), New Orleans, LA, USA, 13–15 December 1995; pp. 2884–2889. [Google Scholar]
- Hagenmeyer, V.; Delaleau, E. Exact feedforward linearization based on differential flatness. Int. J. Control. 2003, 76, 537–556. [Google Scholar] [CrossRef]
- Hagenmeyer, V.; Streif, S.; Zeitz, M. Flatness-based feedforward and feedback linearization of the ball & plate lab experiment. In Proceedings of the 6th IFAC-Symposium on Nonlinear Control Systems (NOLCOS), Stuttgart, Germany, 1–3 September 2004; pp. 233–238. [Google Scholar]
- Milam, M.B. Real-Time Optimal Trajectory Generation for Constrained Dynamical Systems. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2003. [Google Scholar]
- Fliess, M.; L’evine, J.; Martin, P.; Rouchon, P. Flatness and defect of non-linear systems: Introductory theory and examples. Int. J. Control 1995, 61, 1327–1361. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Petit, N.; Milam, M.B.; Murray, R.M. Inversion Based Constrained Trajectory Optimization. IFAC Proc. Vol. 2001, 34, 1211–1216. [Google Scholar] [CrossRef]
- Schoellig, A.P.; Mueller, F.L.; D’Andrea, R. Optimization based iterative learning for precise quadcopter trajectory tracking. Auton. Robot. 2012, 33, 103–127. [Google Scholar] [CrossRef]
- Berkenkamp, F.; Schoellig, A.P.; Krause, A. Safe controller optimization for quadrotors with gaussian processes. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 493–496. [Google Scholar]
- Bristow, D.; Tharayil, M.; Alleyne, A. A survey of iterative learning control. IEEE Control. Syst. 2006, 26, 96–114. [Google Scholar] [CrossRef]
- Assael, J.-A.M.; Wahlström, N.; Schön, T.B.; Deisenroth, M.P. Data-efficient learning of feedback policies from image pixels using deep dynamical models. arXiv, 2015; arXiv:1510.02173v2. [Google Scholar]
- Li, Q.; Qian, J.; Zhu, Z.; Bao, X.; Helwa, M.K.; Schoellig, A.P. Deep neural networks for improved, impromptu trajectory tracking of quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5183–5189. [Google Scholar]
- Lenz, I.; Knepper, R.; Saxena, A. DeepMPC: Learning deep latent features for model predictive control. In Proceedings of the Robotics Scienceand Systems, Rome, Italy, 13–17 July 2015; pp. 201–209. [Google Scholar]
- Hunt, K.J.; Sbarbaro, D.; Zbikowski, R.; Gawthrop, P.J. Neural networks for control systems a survey. Automatica 1992, 28, 1083–1112. [Google Scholar] [CrossRef]
- Balakrishnan, S.; Weil, R. Neurocontrol: A literature survey. Math. Comput. Model. 1996, 23, 101–117. [Google Scholar] [CrossRef]
- Bansal, S.; Akametalu, A.K.; Jiang, F.J.; Laine, F.; Tomlin, C.J. Learning quadrotor dynamics with neural nets for flight control. arXiv 2016, arXiv:1610.05863. [Google Scholar]
- He, W.; Dong, Y.; Sun, C. Adaptive Neural Impedance Control of a Robotic Manipulator With Input Saturation. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 334–344. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; van der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2261–2269. [Google Scholar]
- Kamel, M.; Burri, M.; Siegwart, R. Linear vs. Nonlinear MPC for Trajectory Tracking Applied to Rotary Wing Micro Aerial Vehicles. IFAC-Pap. 2017, 50, 3463–3469. [Google Scholar] [CrossRef]
- Agarap, A.F. Deep learning using rectified linear units (relu). arXiv 2018, arXiv:1803.08375. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhu, Q.; Elahi, A. Quadcopter Trajectory Tracking Control Based on Flatness Model Predictive Control and Neural Network. Actuators 2024, 13, 154. https://doi.org/10.3390/act13040154
Li Y, Zhu Q, Elahi A. Quadcopter Trajectory Tracking Control Based on Flatness Model Predictive Control and Neural Network. Actuators. 2024; 13(4):154. https://doi.org/10.3390/act13040154
Chicago/Turabian StyleLi, Yong, Qidan Zhu, and Ahsan Elahi. 2024. "Quadcopter Trajectory Tracking Control Based on Flatness Model Predictive Control and Neural Network" Actuators 13, no. 4: 154. https://doi.org/10.3390/act13040154
APA StyleLi, Y., Zhu, Q., & Elahi, A. (2024). Quadcopter Trajectory Tracking Control Based on Flatness Model Predictive Control and Neural Network. Actuators, 13(4), 154. https://doi.org/10.3390/act13040154